单旋翼无人机植保作业系统的研制与实验研究
2024-05-27 13:58:13赵洪光滕文建
科技资讯 2024年1期
赵洪光 滕文建
关键词: 无人机 植保 单旋翼 喷洒作业
中图分类号: S224.3 文献标识码: A 文章编号: 1672-3791(2024)01-0009-06
近年来,不合理的种植方式和不科学的施肥习惯使农作物的病虫害越来越严重,而在病虫害防治过程中,喷洒农药的劳动强度大、作业频次高,使机械化病虫害防治作业成为越来越重要的植保方式。这种方式可以从而促使机械化病虫害防治技术快速发展。植保无人机成为现代农业航空技术应用的一个重要领域[1]。
在病虫害防治的机械化发展过程中,固定翼飞机植保技术受限于建设专用机场和跑道,不利于推广。多旋翼无人机植保系统具有重量轻、操作灵活、适应性强的优点,但起降频繁且需要专业无人机操控人员的特点,限制了病虫害防治机械化的高效性[2-3]。单旋翼轻型无人机经过改进后,载重量大、工作效率高且能实现自动化控制的飞行方式,能有效提高病虫害防治机械化的效率。
北京大运通航科技有限公司经过市场需求和现有产品的调研,联合618所、54所共同研制了载药量180 kg的单旋翼无人机植保作业系统,并进行了飞行实验和喷洒实验研究。DP180 型单旋翼无人机植保作业系统实现了植保作业过程中飞行和喷洒的全自动化,改善了我国目前施药技术落后、农药有效利用率低、施药作业效率低等关键问题。
1 DP180 型单旋翼无人机植保作业系统的研制
1.1 作业任务设计
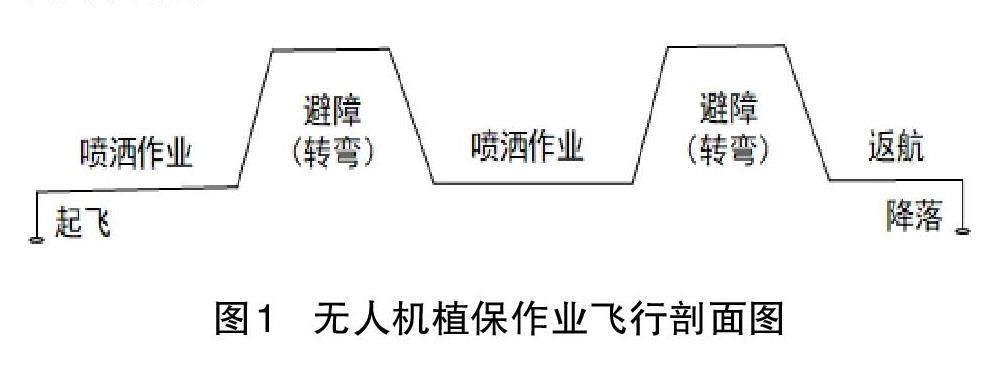
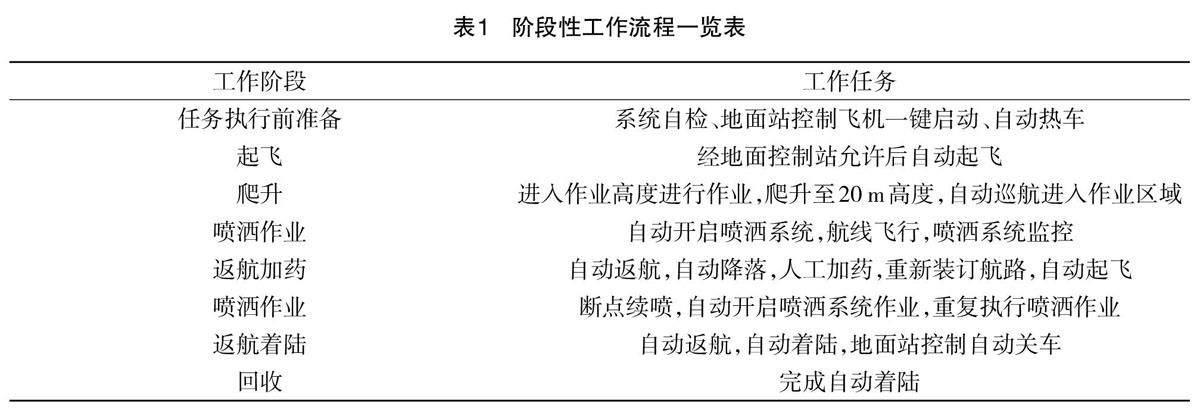
根据无人机植保作业剖面图(如图1 所示)来设计DP180 型单旋翼无人机植保系统的喷洒作业流程,具体如表1 所示。
根据作业流程,DP180 型单旋翼无人机植保系统实现启动、预热、起飞、飞行、喷洒作业、加药和返航等全过程无人工干预的自动飞行作业。
1.1.1 启动
飞行控制操作手通过地面站系统一键启动控制直升机发动机启动,副飞行控制器启动用作手动飞行控制的备份。
1.1.2 发动机预热
发动机启动后进入怠速状态,飞机状态正常,飞行控制系统自动控制发动机进入2 000 RPM 保持预热状态。随着发动机滑油温度、滑油压力、气缸温度达到要求,飞机发动机进入额定状态,如果系统状态正常,则达到起飞状态准备起飞;如果系统不正常则返回错误状态信息。
1.1.3 起飞
无人机达到允许起飞状态后,可接收地面站的起飞指令自动起飞。
1.1.4 飞行
无人机根据预设的航线及喷洒任务,依次完成加速、爬升、减速、下降、回转等飞行,自主机动达到任务区域并保持作业高度。
1.1.5 喷洒
喷洒作业包括自动喷洒、巡航和返航,无人机到达作业区域后,飞行控制系统打开喷洒系统进行喷洒作业。在通信距离极限内可完成自动爬升、协调转弯、下降并重新进入作业区域进行喷洒作业。在喷洒系统药量用尽之后,飞行控制系统根据返航指令,自动计算返航路线。
1.1.6 加药
无人机返航达到加药点后自动降落,可进行不停车加药,待飞行状态一切正常后,重新执行喷洒作业流程。在无人机降落、加注农药、加注燃料过程中,地面航迹规划软件重新计算飞行航迹后注入航线,完成后续喷洒作业任务。
1.1.7 返航
无人机完成喷药任务后自动返航、降落、停车。
1.2 整体系统设计
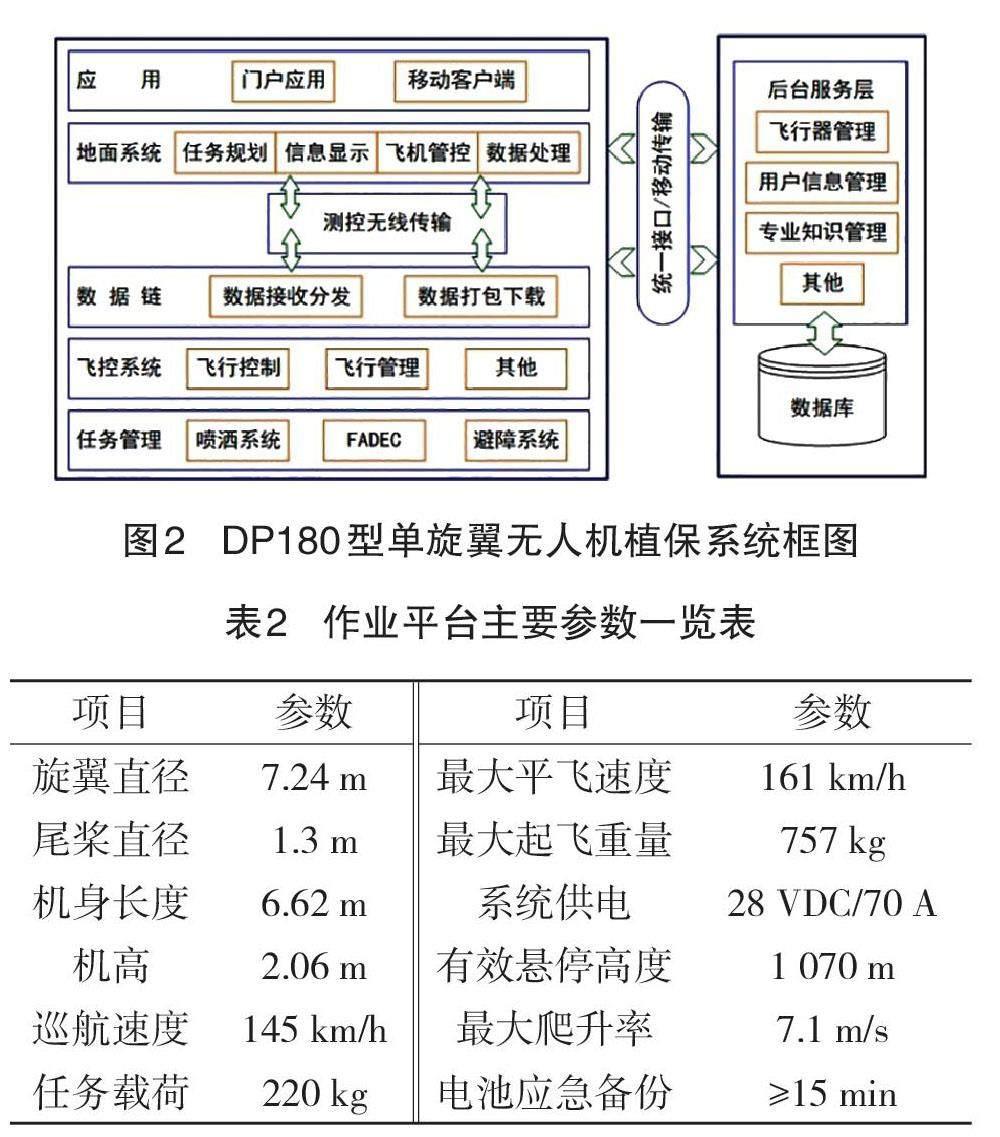
DP180 型单旋翼无人机植保系统主要包括无人機作业系统与后台服务系统两大部分,作业系统包括作业平台、飞行控制、数据链路、地面站系统、系统应用;后台服务系统包括飞行器管理、用户信息管理、专业知识管理、大数据业务。系统框图如图2 所示。
1.3 作业平台的研制
1.3.1 作业平台的功能及组成
作业平台是为植保作业提供可靠、稳定的飞行平台,为各种任务载荷提供电力支持,为喷洒设备提供有效载荷,为飞行控制、链路测试设备提供挂载平台。作业平台结构采用模块化设计,能便捷地进行维修和维护操作。
作业平台的动力传动采用1 台功率180 HP 的莱康明IVO-360 活塞发动机,并通过改装提升了发动机的马力。主旋翼系统采用两段式设计,能实现快速、便捷地维护和拆卸。主供电系统采用1 台AL24-P70 发电机,供电能力为28 Vdc/70 A。
1.3.2 作业平台的主要指标参数
作业平台的主要指标参数具体如表2 所示。
1.3.3 发动机控制系统
为实现发动机的一键启动功能,对发动机各个状态的参数进行完整的监控与分析,同时建立了发动机的全权限数字电子控制系统(Full Authority Digital EngineControl,FADEC)。在飞行控制系统的配合下,FADEC 主要实现以下功能:冷车、预热状态下一键启动,发动机混合比的控制,油门的联动控制,发动机的数据存储与维护支持等。
FADEC 系统主要由发动机控制单元、油门及各传感器、被控组件,以及它们之间的电气线路组成。FADEC 根据不同的飞行状态和动力需求来调整发动机工况,系统框图如图3 所示。
1.4 飞行控制系统研制
1.4.1 飞行控制系统功能
飞行控制系统功能包括发动机控制、稳定飞行控制、机动轨迹控制、程序控制以及飞行管理。
(1)发动机控制。飞行控制系统设定了地面和空中两种基本状态,通过反馈停车、怠速、预热和额定4种状态下发动机的转速范围,确定发动机是否工作正常,是否在额定状态工作正常。飞行控制系统进一步对发动机相关的传感器进行控制,配合平台电气系统对电气控制。
(2)稳定飞行控制。飞行控制系统实现了9 种稳定飞行控制功能,包括三轴姿态保持(ATT)、速度给定与保持(VEL)、航向给定与保持(HDG)、高度给定与保持(ALT)、自动区域导航(NAV)以及位置给定与保持(PH)等。
(3)机动轨迹控制。飞行控制系统实现了9 种机动轨迹控制功能,包括起飞、着陆、加速、减速、爬升、下降、回转、左盘旋、右盘旋。
(4)程序控制。根据典型任务剖面,实现了从起飞到悬停到航线飞行到进场到着陆的整个阶段的全自动控制飞行,并实现了不停车加药后的复飞作业。根据不同的飞行阶段,实现了包括航点管理、航线管理、导航计算等多项工作,并启动相应的工作模式,根据舵机指令,控制飞机按照预定航线飞行。
(5)飞行管理。飞行控制系统的飞行管理包括以下内容:对直升机状态参数、发动机参数及机载设备参数采集与计算;飞行控制系统与管理系统故障检测;对机载电气设备故障检测,测控与信息传输设备进行监控和管理,飞行参数、故障信息、关键状态的实时记录,对机载喷洒系统进行控制与禁航区管理。
1.4.2 飞行控制系统组成
飞行控制系统组成具体如图4 所示。
1.4.3 飞行控制系统主要参数
飞行控制系统主要参数具体如表3 所示。
2 实验结果与分析
本实验于2022 年7 月14 日到8 月6 日在孟州市黄河滩农场进行,实验机型DP180 型单旋翼机无人机(如图5 所示)。实验对无人机进行作业模式、喷洒效果与喷洒幅度、航线控制精度、地面耗时测试。
2.1 无人机作业模式的测试
无人机需要快速完成飞行姿态的调节[4],飞行操控模式采用飞行控制操作员利用地面设备以“指令方式”控制飞机飞行,根据转弯方式不同分为悬停位置遥调(飞机定点180o转弯后进行位置遥调,然后进入预设航线飞行)、悬停带速度转弯(飞机定点转弯145o后进行加速且给定航向切入预设航线飞行)、协调转弯(飞机带速度转弯飞行)。从表4 的数据看出,悬停位置遥调所用的时间最少,因此无人机喷洒测试选择悬停位置遥调方式进行飞行测试。
2.2 飛行速度对喷洒效果与喷洒幅度的影响
重载荷会严重影响植保无人机的稳定飞行,严重降低喷施作业的覆盖率和均匀度[5]。风是影响飞机飞行轨迹和飞行姿态的主要因素[6]。需要对喷施作业进行覆盖率和均匀度试验。单旋翼无人机飞行高度保持7 m,风速为0~1 m/s时,分别测试飞行速度10 m/s、12 m/s、15 m/s时对喷洒效果与喷洒幅度的影响。喷洒实验时,提前布置水敏纸雾滴测试卡,间距设计为1 m 并记录编号,喷洒结束后,晾干测试卡,利用DepositScan 软件对雾滴覆盖率和雾滴密度进行分析。测试卡试样具体如图6~图8 所示。
根据《农业航空作业质量技术指标》(MH/T 1002.1-2016)第1 部分:喷洒作业中关于作业质量技术的要求,当飞行速度为10 m/s时,满足常量喷洒的有效喷洒幅度12 m;当飞行速度为12 m/s 时,满足常量喷洒的有效喷洒幅度9 m;当飞行速度为15 m/s时,不满足任何类型喷洒质量技术指标。因此,同样的条件下,随着飞行速度的增加喷洒幅宽逐步减小。
2.3 风速对喷洒效果与喷洒幅度的影响
从表5 数据可以看出,保持同样的作业高度和作业速度时,在合适的风速下可以满足常量喷洒标准,但风速对喷洒效果影响比较大。因此,在进行喷洒作业时,要充分考虑风速的影响。
2.4 航线控制精度的测试
从表6 数据可以看出,当飞机稳定速度飞行时,飞机航线控制精度维持在±11 m 的偏距,推测由飞机航向保持精度误差引起,需进一步提高航向保持精度误差;当飞机加速、减速飞行时,飞机航线控制精度也出现较大偏差,推测加减速是飞机姿态不稳定因素与机航向保持精度误差共同作用的结果,需进一步提高飞机不同姿态转变的稳定性。
3 结语
无人机作业模式的实验表明,悬停位置遥调所用的时间最少,飞行模式应选择悬停位置遥调模式。飞行速度对喷洒效果与喷洒幅度的影响实验表明,飞行速度不超过12 m/s 时,能够满足常量喷洒。风速对喷洒效果与喷洒幅度的影响实验表明,由于飞行得较高,风速对喷洒效果影响比较大,在飞行高度7 m、飞行速度12 m/s、风速1 m/s 时,能够满足常量喷洒。航线精度控制实验表明,受无人机姿态变化因素和航向保持精度的影响,航线控制精度不高,需要进一步提高精度。
综合分析结果表明,单旋翼无人机植保系统能够满足植保时药物的喷洒效果,大大提高了植保作业效率,增加的单架次作业区域,缩短了植保时间,减少了病虫害对农作物的危害时间。单旋翼无人机植保系统的研制与实验可为植保无人机的研究提供参考和指导。
猜你喜欢
广西植保(2021年4期)2022-01-06 07:55:00
今日农业(2021年17期)2021-11-26 23:38:44
湖北农机化(2020年4期)2020-07-24 09:07:34
农药科学与管理(2019年7期)2019-11-29 07:35:14
新农业(2017年2期)2017-11-06 01:02:23
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
新农业(2016年22期)2016-08-16 03:34:45
企业导报(2016年9期)2016-05-26 20:58:26