底板转动无支撑3D 打印机的设计
2024-05-27 13:58:13卢佳妮李秋实张彤
科技资讯 2024年1期
卢佳妮 李秋实 张彤
关键词: 3D 打印机 无支撑打印 底板转动 柔性支撑
中图分类号: TP33 文献标识码: A 文章编号: 1672-3791(2024)01-0078-04
3D 打印(3D Printing)被誉为一项将会改变世界的技术,是新时期材料加工的巨大进步,极大地缩短了产品的研制周期,提高生产率并且降低了生产成本。
但是现有的3D 打印多为在垂直工作台面进行分层,打印时依次平行地堆叠材料,其分层堆积的特点决定了在制造过程中必须为具有悬空结构的部分堆叠一定的材料作为支撑才能进行打印。3D 打印质量受打印模型本身支撑的影响,存在支撑结构难以去除、产品表面质量不佳、打印时间长、材料利用率低和容错率低等问题,这些都制约着3D 打印技术的发展[1]。
针对上述问题,打破传统的单一维度的层层堆叠,将模型进行分区,在不同区域采用不同的堆叠方向,实现了模型打印的无支撑需求,解决了现有技术中打印悬空结构需要添加支撑结构的问题。这种技术通过不断地变换底板角度进行模型的打印,实现无支撑打印的目的。为此,笔者设计了对应的结构和平台以适应打印过程的改变[2]。
1 工作过程分析
1.1 总体工作过程
(1)加热部分工作,将打印环境和挤出机设置至合适温度后保持此温度,配有温度检测模块实时温度监测[3]。
(2)将模型导入切片软件,切片软件对打印模型进行分析,将模型进行分区处理。
(3)挤出机进行工作,配合步进电机将原料层层堆叠,开始打印。
(4)水冷工作系统用于喷头的快速降温,避免模型的损坏。
(5)先打印模型主体部分,打印完毕后Z 轴步进电机带动底板进行过旋转,旋转结束后将底板调至合适位置。
(6)模型下方有柔性支撑,和底板配合使用后能够使打印模型拥有更多稳定的支撑点。
1.2 底板转动过程
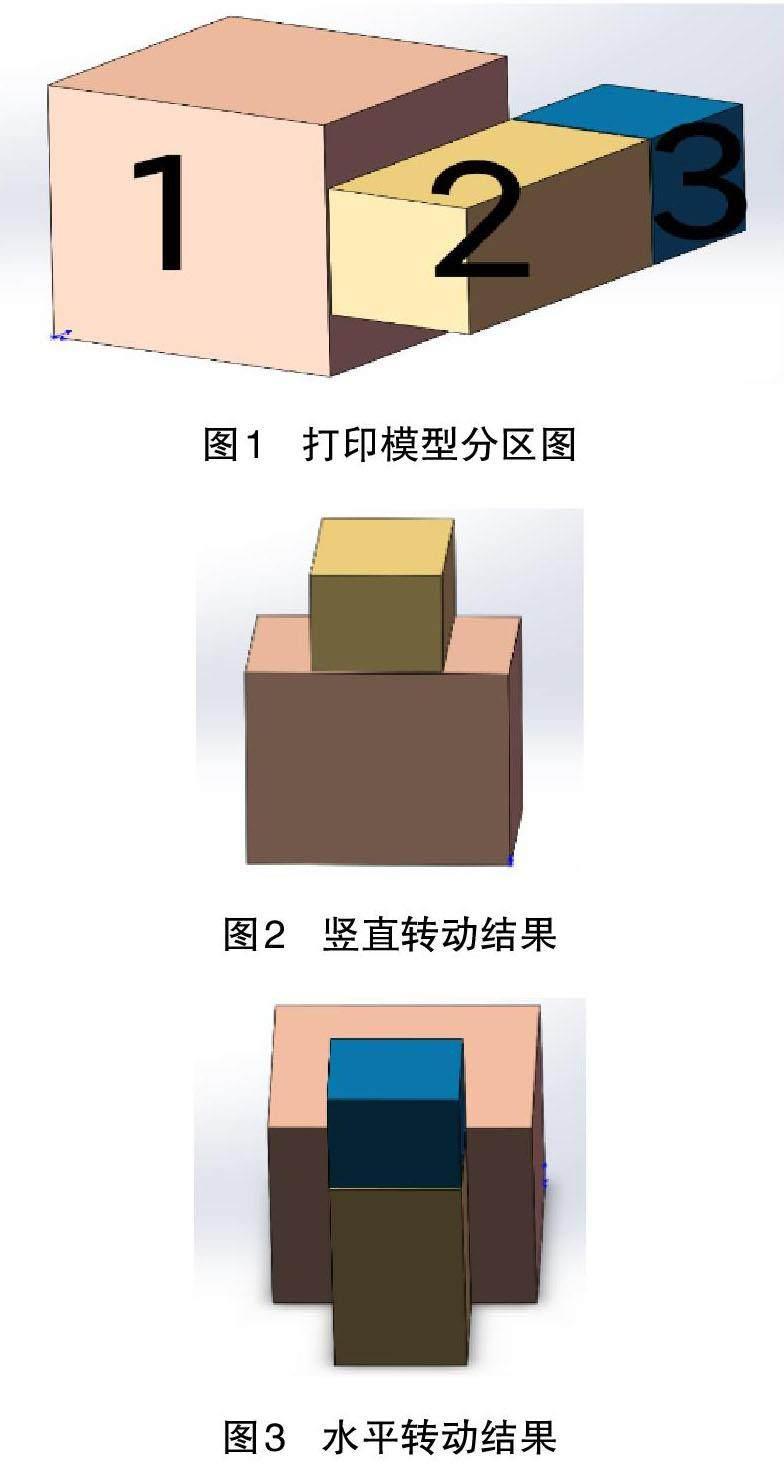
下面以图1~图3 为例分析打印工作过程。打印该模型前,软件先将该模型进行分区处理,如图1 所示分为3 个区域。当“1”区域打印完毕后打印平台进行竖直轴的转动(90°),模型如图2 所示,转动完毕后可以形成一个新的打印平面,同时柔性支撑调整到合适位置支撑打印完毕的“1”区域,使“2”区域可以进行打印;当“2”区域打印完毕后,水平轴进行旋转(90°),再一次形成新的无支撑打印平面,如图3 所示,此时可以进行“3”区域的打印[4]。
2 结构分析
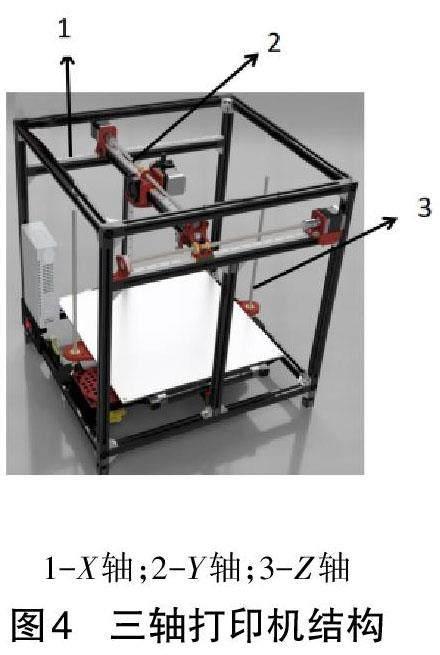
2.1 3 轴打印机结构分析
传统的三轴类型打印机是建立在三维坐标系内,在三个方向上通过步进电机和螺纹丝杆的配合进行工作,在模型的悬空位置通过添加树状支撑辅助进行打印。
如图4 所示,打印平台固定在Z 轴上,在电机驱动下沿竖直方向运动;打印喷头固定在Y 轴上,Y 轴再与X 轴固定,在X 轴、Y 轴电机驱动下打印喷头可以完成水平面的运动,结合Z 轴带动的打印平台即可完成打印工作[5]。
2.2 无支撑底板转动3D 打印机结构分析
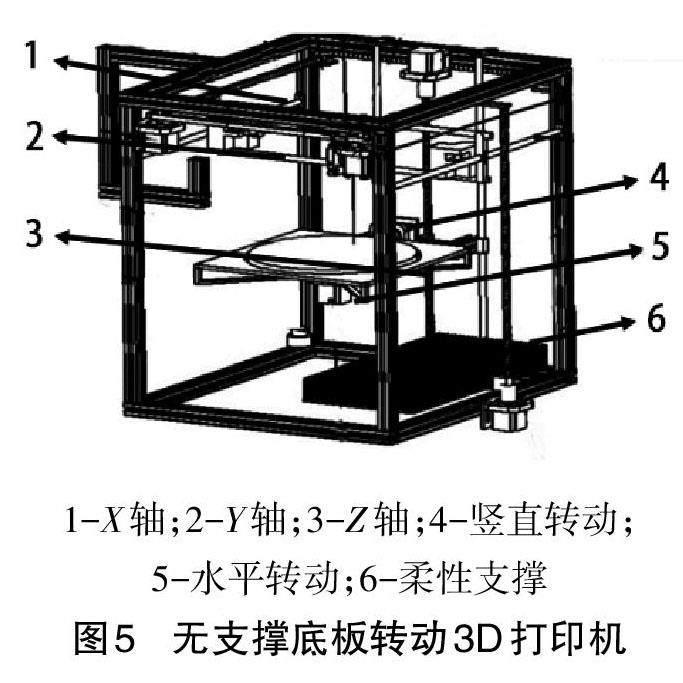
本文所述的无支撑底板转动3D 打印机是在原有3D 打印机基础上将打印平台进行改造,将原本只能在Z 向移动的平台上加入两个维度的方向,使其加入两轴,增加了新的打印平面的形成,使模型表面与打印喷头之间的接触方向变得多向化。
无支撑底板转动3D 打印机的设计难点在于如何使打印物体不断地形成新的打印平面。为此,笔者独创性地提出打印平台的改造,在原有控制打印平台升降移动的基础上增加控制打印平台转动和倾斜的步进电机驱动。如图5 中的4-竖直转动所示可以使打印平台进行倾斜转动,5-水平转动可以使打印平台进行水平方向的旋转。
2.3 总体设计方案
打印机主要结构的三维设计图具体如图6 所示。槽铝组成整体框架;步进电机和聚碳酸酯板组成底板位于打印机中下方;移动轴部分的丝杆、光杆和步进电机构成Z 轴移动轴,位于打印机后方;履带、光杆和步进电机构成X 轴、Y 轴移动轴,位于打印机两侧;挤出机、加热喷头和特氟龙管组成进料口位于打印机上方;槽铝支架构成可拆卸放料器位于打印机左侧;专用水路组成的水冷部分位于加热喷头旁;激光头及反射镜座组成的激光雕刻部分分别位于打印机左侧和挤出机旁。
3 控制电路设计
3.1 主电路板设计
(1)底板转动无支撑3D 打印机采用2560 芯片。这种芯片的集成度比较高,可以完成多种指令的收发,而且故障出现概率较小。
(2)底板转动无支撑3D 打印机采用USB 通信,兼容性较强,数据传输也比较稳定
(3)底板转动无支撑3D 打印机的步进电机支持多种型号,而且可以接较大的驱动。
(4)底板转动无支撑3D 打印机所采用的电路板具有较高的质量,并且散热效果比较好,支持长时间不间断工作。
(5)采用专用电源芯片,支持12~24 V 电源输入,解决Ramps 电压转换芯片发热问题。
(6)该打印机主要接收24 V 的电压输入,在相同的条件下可以降低输入电流,减小总的输入功率。
(7)固件可使用开源固件Marlih。配置和Ramps1.4完全相同,可直接替代Ramps1.4。
(8)直接连接控制板进行命令的输入,让打印控制的开始和暂停更加灵活,具有更高等级的终端控制。
(9)充分考虑稳定性、散热、易用性问题,通过连续打印获得可靠性测试。
(10)预留了其他类型的接口,如大电流接口,可以增大设备的兼容性,适应多种情况的输出。
(11)保留系统上的3 个接口,同时具有两种类型,共6 个输出接口。
(12)可连接TFT28、TFT32 触摸屏。
主电路板设计图详见图7。
3.2 温度控制系统
针对打印模型时需要加热,而原有加热方式为平台加热且加热效果较差的问题,笔者设计了一种可以多位置检测、快速进行调整的温度检测控制系统,详见图8。该系统由DS18B20 测温模块和AT89C51 组成,在密闭打印环境内分布多个测温模块,实时将监测到的温度变化显示在LCD 显示屏幕上,减少人机交互,增加直观性。
DS18B20 将检测到的温度信号直接转换成串行数字信号供AT89C51 处理,采用单线接口方式,仅需一根线连接,无须接口电路。电路结构简单,测量信号温差小,便于使用。该温度控制系统能够极大地改善在低温环境下打印的翘边现象,大大减少打印废件的产生,可以替代热床,同时该温度控制系统能够实时检测环境温度并在显示屏上显示控制参数[6]。
4 创新点
4.1 底板转动
底板由步进电机和聚碳酸酯板构成,主要用于打印模型的放置、固定与旋转。模型主体打印完毕后进行转动,使模型处于无须支撑的打印状态。
4.2 温度保持
由热吹风组成恒温器用以保持打印环境的温度,实现恒温功能,可以防止打印模型出现翘边导致成品无法使用等问题。
4.3 柔性支撑
打印模型主體部分时不需要使用柔性支撑,待主体部分打印完毕,柔性支撑开始工作。其主要目的是给予模型支撑点,防止模型脱离打印平台。
5 结语
本文阐述了一种基于三轴3D 打印机结构的无支撑底板转动3D 打印机,通过增加两个维度的轴向转动,可以实现悬空部件的无支撑打印,与其他多轴联动相比转动幅度更大、更彻底,为3D 打印机的高效打印提供了新的发展思路。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
文化创新比较研究(2020年7期)2021-01-13 09:10:48
发明与创新(2016年34期)2016-08-22 03:00:46
中国塑料(2016年7期)2016-04-16 05:25:55
中国塑料(2016年7期)2016-04-16 05:25:54
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:43
中国塑料(2015年2期)2015-10-14 05:34:32
中国塑料(2015年11期)2015-10-14 01:14:22
发明与创新(2015年30期)2015-02-27 10:39:50