
路侧侵扰影响下的机动车速度特性分析及预测
2024-05-23 08:33谢济铭钱正富夏玉兰赵鹏燕秦雅琴
重庆大学学报 2024年3期
关键词:交通工程
谢济铭 钱正富 夏玉兰 赵鹏燕 秦雅琴

收稿日期:2022-03-30
网络出版日期:2022-11-15
基金项目:国家自然科学基金资助项目(71861016)。
作者简介:谢济铭(1994—),男,博士研究生,主要从事交通状态识别与演变研究,(E-mail) xiejiming@kust.edu.cn。
通信作者:秦雅琴,女,教授,博士生导师,(E-mail) qinyaqin@kust.edu.cn。
摘要:低等级道路路侧侵扰现象频繁,冲突严重,紊乱无序。准确预测其复杂交通行为特性,可揭示路侧侵扰影响下的交通事故发生机制。为此采集低等级公路和城市道路5类常见的路侧侵扰源视频,提取高分辨率车辆微观轨迹,获取行经侵扰区的车辆速度,划分侵扰区特征断面,分析车速时空特性演变规律,采用线性、对数以及三次回归建立车速预测模型。三次回归模型在侵扰区复杂场景下表现出更好的车速预测性能。结果表明:低等级城市道路侵扰区的车速降幅普遍高于公路,驾驶人在侵扰源及附近减速效应显著,当驾驶人与侵扰主体的意图协调后,驾驶人会加速通过前方侵扰区,但当侵扰主体的行为意图难以预测时,车速会出现一定波动。
关键词:交通工程;车辆速度;交通特性;低等级道路;路侧侵扰
中图分类号:U495 文献标志码:A 文章编号:1000-582X(2024)03-053-13
低等级道路是中国的国省干线路网的重要组成部分,截至2021年,中国的三级、四级公路仍占公路总里程80%以上[1]。尤其是偏远地区地形复杂,道路条件有限,低等级道路在建设前期,周边用地性质未深入考虑规划。随着城镇化进程的发展,一些低等级道路路侧形成了商业聚集区,非机动车随意穿行、行人过街、路侧停车等侵扰现象屡见不鲜[2],使路侧侵扰逐渐变得复杂化[3-4]。路侧侵扰的偶发性、侵入性与随机性对道路系统运行造成了严重影响,导致机非混行、人车混行的紊乱交通流状态。交通安全问题日益凸显,亟待探究路侧侵扰影响下的车辆运行速度变化规律,挖掘侵扰影响机理,掌握路侧侵扰区交通紊乱、事故常发的交通运行规律。
在不同侵扰源对交通的影响研究方面,学者们把常见的侵扰源进行分类,分析了常见的侵扰源对正常运行的机动车的侵扰程度[5]。有的研究中依据运动状态将侵扰源划分为静态侵扰[6]与动态侵扰[7],有的从交通参与者角度出发,将不同侵扰源划分为路侧停车[8-10]、行人[11]、非机动车[12-13]和支路出车[14]侵扰。不同侵扰源对车辆运行速度、道路通行能力、交通事故率等方面的影响程度不一。其中,车辆运行速度因其具有描述车辆运行的动态变化规律、反映驾驶人的行为模式等特性,成为研究的重点。例如,徐进等[15]将车辆运行速度细化为特征百分位速度进行研究,更好地体现了车辆在不同位置的运行规律。秦丽辉等[16]分析了路侧自行车侵扰下的侵扰数量对邻近机动车道平均行程车速的影响,采用回归分析方法构建了速度预测模型。
总体而言,国内外学者从多角度多层次进行了分析,不仅有关注路侧侵扰源对机动车运行速度[17-19]的影响,还有研究关注对道路通行能力[20]、交通安全[21]、跟驰行为[22]的影响,为中国的低等级道路交通安全问题的深入研究作出了重要的贡献。以往研究受限于数据采集方式,存在侵扰样本量小、采集频率低、时变特征不明晰等特点;研究多聚焦于村镇公路、农村道路等侵扰场景,较少涉及低等级道路交通构成、交通量、驾驶行为的显著区别。
为此,笔者考虑低等级道路路侧侵扰源復杂、交通行为紊乱的交通特性,选取典型低等级公路与低等级城市道路,采用无人机高空视频车辆轨迹高分辨率信息提取技术,采集了常见的5类侵扰场景(非机动车、路侧行人、路侧停车、行人过街和支路出车)的全样本数据,精细地捕捉和再现了侵扰区车速分布规律,明确了5类侵扰场景区段的运行特性和驾驶行为特征,为揭示低等级道路路侧侵扰区的事故发生机制提供了理论依据。基于全样本自然驾驶实验数据,建立低等级道路路侧侵扰区的运行特性预测模型,优化和完善了低等级道路运行车速预测模型体系,能为低等级道路安全评价及路侧侵扰区交通组织管理提供参考。
1数据采集与处理
1.1实验路段
研究场景为低等级道路,旨在探索路侧侵扰影响下,行经侵扰区车辆的车速变化规律[23]。具体实验流程如下:
1)选取道路断面形式为一块板的低等级道路,对选定的路段进行实地考察,实验人员在周边高地瞭望观测,确保存在侵入、占用机动车路权的现象[24]。
2)遴选路侧侵扰较多的路段,同时为避免数据采集影响交通运行,实验人员在周边高地,使用无人机等装置获取路侧侵扰段及其上下游的高空视频数据[24]。
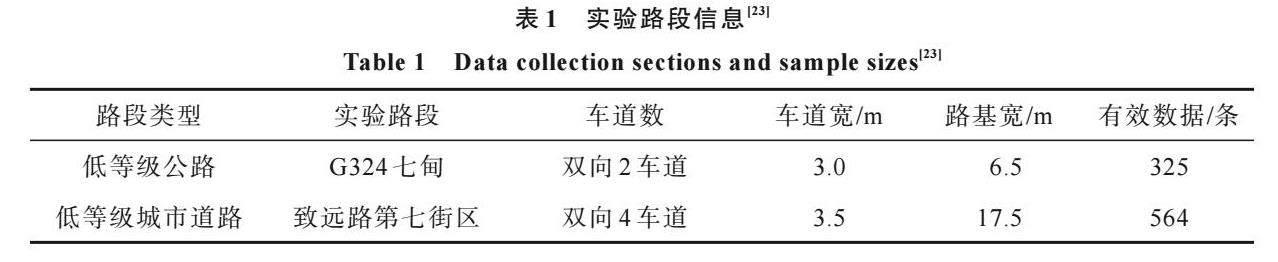
为了更好地研究路侧侵扰段的车辆运行特性,掌握路侧不同侵扰源的侵扰强度,实验人员在低等级公路和低等级城市道路上进行了2类场景观测实验。其中,低等级公路选取昆明市呈贡区七甸乡附近的G324段,道路设计车速为40 km/h;低等级城市道路选取昆明市呈贡区致远路第七街区附近的路段,道路设计车速为60 km/h。数据采集路段的主要信息如表1和图1所示,文中数据来源于G324七甸、致远路第七街区[23]。
1.2数据采集
本研究的目的是探究行经低等级道路的机动车在各侵扰源影响下的速度变化规律。为保证道路上的车辆处于自由流状态,排除道路拥堵对试验结果的影响,在天气晴朗、亮度和光强较为合适的低峰时间段内进行实验。
数据采集主要设备为大疆御MAVIC AIR2专业航拍无人机。为了更好地分析路侧侵扰源影响区段内交通参与者的行为,在无人机的限飞高度内,尽可能地采集足够长的观测区间段的交通运行状况,选取侵扰源及邻近200 m范围作为本研究的观测区。拍摄完成后使用多尺度KCF(Kernel correlation filter)优化算法提取获得本研究所需数据[25]。
1.3样本量与算法精度
为真实反映路侧侵扰情况下车辆实际运行状况,需保证实测数据的样本量。根据统计学原理可知,最小样本量应满足式(1)的要求[15]:
式中:n为最小样本量;δ为估计样本车速标准差,一般取8 km/h;K为置信度水平系数,置信水平系数为95%时,K=1.96;E为车速观测允许误差,一般取E=2 km/h。
经测算,实例研究最小样本量应为61辆。在高空视频数据中,以5 min为统计时间间隔,低等级公路每断面平均观测样本量为325辆;低等级城市道路每断面平均观测样本量为564辆,采集数据符合最小样本量标准。
2路侧侵扰区车辆行为特性
2.1车速描述统计
驾驶人在实际车辆驾驶过程中,车速可能随交通环境轻微波动。在侵扰源运动倾向不确定的复杂道路环境中,驾驶人难以预判侵扰源的运动轨迹,会产生频繁加、减速行为。如表2所示,为研究不同侵扰源对车辆运行速度的影响,对各侵扰源影响下的车速进行统计,结果表明:
1)车辆行经侵扰区的平均车速远小于限速值,其中,路侧行人侵扰下的公路车速平均值最小,仅为11.30 km/h;支路出车侵扰下的城市道路车速平均值最大,为24.14 km/h;
2)对比各侵扰源下的最大、最小速度差,最大差值出现在为非机动车侵扰下的城市低等级路段,差值为52.74 km/h,最小差值出现在路侧行人侵扰下的低等级公路上,差值为27.81 km/h;
3)各侵扰源影响下的车速偏度都大于0,说明车速左端存在较多极值,数据均值左侧离散程度较高,车速峰度大于0,呈低峰态分布。
整体而言,5种侵扰源类别均会迫使机动车停车让行,非机动车、行人过街最小速度均为0,侵扰影响尤为显著,说明路侧侵扰极大地影响了道路交通流的正常运行。
为了更直观地分析各侵扰影响下的车速分布,绘制路侧侵扰影响路段上的机动车速度频率分布曲线如图2所示。可以看出:
1)对比2类路段上的侵扰源影响程度发现,路侧行人在公路上造成的影响明显大于城市道路,反映出驾驶人在城市道路的期望速度高于公路,而行人过街侵扰在2类研究路段车速分布较为一致,说明驾驶人无论是在何种路段行驶,均会优先考虑减速避让过街行人,侧面反映了中国“礼让行人”的政策法规已初见成效。
2)支路出车侵扰车速众数较高,支路出车影响下的低等级公路车速分布区间为[20,25] km/h、城市道路车速分布区间为[20,35] km/h,说明支路出车使得2类路段下的驾驶人更具危机感,为保证驾驶安全,减速避让幅度均较大,体现出一定的趋同性。
3)存在路侧侵扰时,低等级公路车速分布更为集中,而低等级城市道路车速分布较为离散,说明低等级公路交通流运行更稳定,受到路侧侵扰后可较快恢复正常行驶状态,道路安全韧性更强。
2.2车速时空演变
根据各侵扰源影响下车辆行驶时间、距离及速度,纹理映射刻画瞬时车速的时空分布,重建上述5类侵扰源在城市道路和公路低等级路段的车速时空演变规律,如图3所示。为便于描述车辆行经侵扰源的动态连续过程,设驶入侵扰源的距离为负值、驶离距离为正值。
1)整體而言,在紧邻侵扰源[-20,50] m的距离范围内,车速呈现先减后加的变化趋势。
2)对比5类侵扰源车速时空分布图发现,低等级公路主要侵扰源为非机动车及路侧停车,而城市道路主要侵扰源为路侧行人及行人过街,有时迫使车辆停车让行,致使车速降幅达30 km/h。
3)对比2类研究路段车速时空分布图发现,低等级公路车速波动更剧烈,体现为时空分布图曲面波动更大,而低等级城市道路车速分布更平稳。
2.3侵扰单元车速空间分布
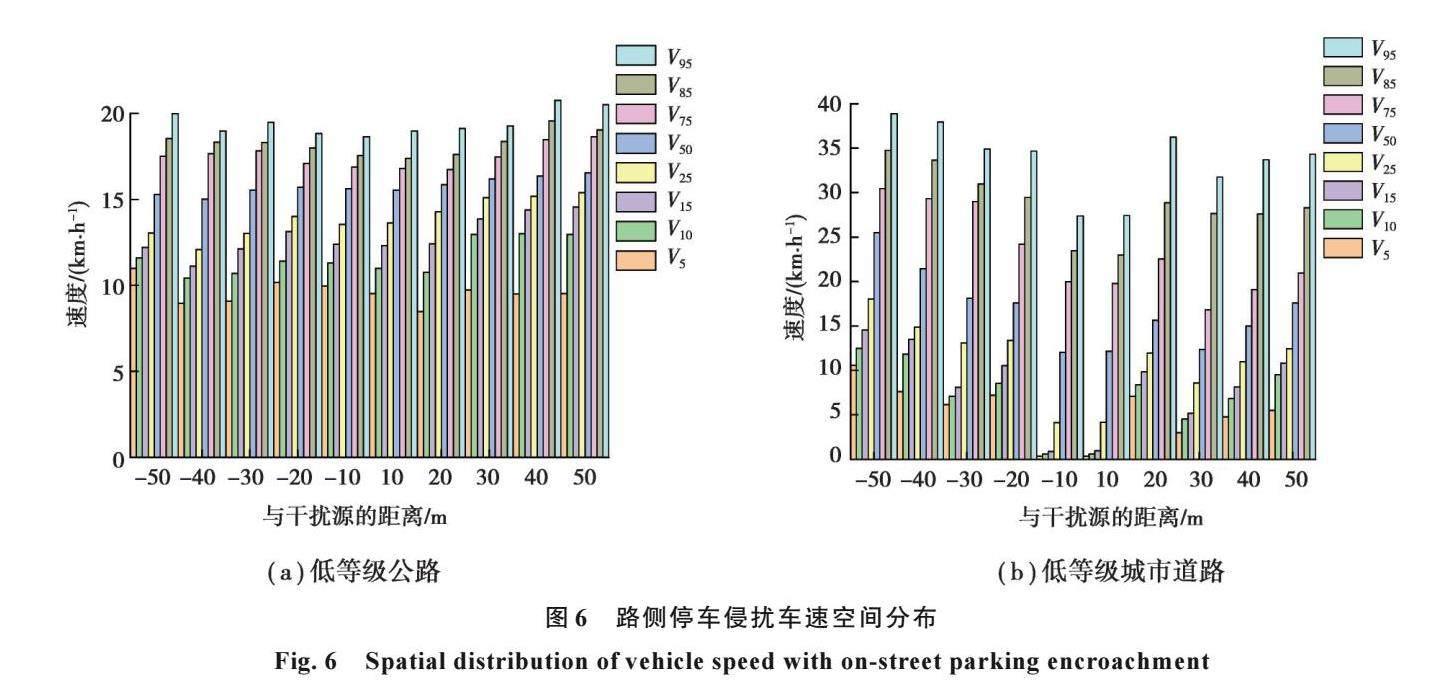
为了更加细致地描述车辆“驶入→行经→驶离”侵扰源的车速空间分布特征,以10 m为单元将侵扰源前后50 m空间距离进行细分。提取每个观测单元5分位、10分位、15分位、25分位、50分位、75分位、85分位和95分位特征速度值(V5、V10、V15、V25、V50、V75、V85和V95),连接相邻观测单位同一百分位速度,得到5类侵扰源在2类低等级路段的车速空间分布如图4~8所示。
非机动车侵扰影响如图4所示。受到交通量等影响,城市道路上的车辆行为可能被紧邻车辆制约,速度变化相对较大。
路侧行人侵扰影响如图5所示,呈现出减速区间更长且车速变化幅度更大的特征,说明行人虽为弱势交通参与者,但其行为更灵活,时常出现横穿道路或往复折返等行为,驾驶人倾向于以更加谨慎的行为方式通过侵扰源,即使驶离侵扰源,依旧保持低速平稳行驶。
路侧停车侵扰影响如图6所示,车速在低等级公路上较为平稳,而在低等级城市道路上波动较大,与图4非机动车侵扰影响总体趋势一致。说明路侧停车侵扰更多受到交通量、跟车间距等影响,导致车速趋势存在局部性波动,加之路侧停车现象在低等级公路上较为普遍,因此对车速干扰较小。
行人过街侵擾影响如图7所示,车速变化趋势在2类路段上较为一致,总体变化趋势为先下降后上升,这一规律在城市道路中更明显,说明车辆未观测到侵扰源前倾向于平稳通过,遇到侵扰源后减速慢行通过,驶离侵扰源10 m后逐渐加速,直至提速至正常车速。
支路出车侵扰源影响如图8所示,与低等级公路相比,城市道路车速幅值变化更显著。这是由于城市商业区支路出车位置比较固定,停车场警示标志设置更规范,驾驶人可较好地预判支路车辆运动倾向,有效减速后通过干扰源。受视距视野、路面摩擦系数、交通流量、警示标牌等影响,低等级公路车辆行经全程更谨慎平稳,车速仅发生局部性波动。
2.4侵扰区车速分布特性分析
考虑到本研究中实例场景复杂、特征差异大、样本不均衡、驾驶风格不一等因素可能导致部分车速值异常,采用特征百分位速度分析关键参数V85和V15,反映道路服务水平,广泛运用于公路设计与评价领域。从图9可以看出:
1)低等级城市道路(限速60 km/h)的V85和V15略大于低等级公路(限速40 km/h),即便考虑2类研究对象间的限速值差异,归一化处理后此结论依然成立,说明驾驶人在城市驾驶环境中安全意识更高,受到侵扰影响后反应更剧烈,速度离散较高。
2)低等级公路与城市道路的V85、V15分别集中分布于[5,30] km/h、[25,80] km/h,说明部分车辆存在超速行为,这是由于车辆行经干扰源前超速行驶,驶近干扰源过程中速度降低,由于车速抓拍等手段不完善,部分驾驶员限速遵从度低,侧面说明了路侧侵扰影响下安全保障的另一重要措施是加强执法强度。
3)支路出车为车速降幅最大侵扰源,车辆通过支路出车侵扰源后均有明显的加速行为,其中,城市道路加速行为更突出,表现为加速行为更早、幅值更高、车速离散度更大的特性。
总体而言,低等级城市道路车速离散性大于公路,受到侵扰源影响后,产生更剧烈的纵向干涉作用,更易发生追尾事故。可考虑将车速协调性纳入路侧侵扰影响下的道路运行评价体系中,对建成运营后存在侵扰源的道路加大执法力度,保障交通参与者的生命财产安全。
3侵扰区车速预测模型
如前述,为保证安全行驶,车辆在驶近侵扰源的过程中通常会减速避让,易造成交通紊乱并引发事故。通过深入挖掘侵扰区车速运行规律,构建更精准的车速预测模型,进而正确合理地推断未来的交通状况,对减缓交通拥堵、降低交通事故率有重要的现实意义和应用前景。基于此,考虑了车速随车辆与侵扰源的距离以及车速的离散性,对传统的速度预测模型进行改进,参考线性[25]、对数[26]、三次回归[27]经典车速预测模型,构建各侵扰源影响下车速与距侵扰源距离的车速预测模型。
3.1线性回归
由侵扰区车速特性分析得知车速在驶近驶离侵扰源过程中呈先下降后上升的一致趋势,符合已报道的研究结论[23]。因此,车辆驶近侵扰源过程应优先考虑车速折减与速差的离散性,建立基于速差离散值的回归模型,即距侵扰源的“空间距离x”与“速差离散值Vdiff”的线性关系模型:
线性回归模型(置信水平均小于0.1,置信度95%)参数结果如表3所示。表中R2为相关系数,表征模型的拟合优度;P为显著性值,表示极端结果出现的概率;黑体表示的数值为拟合度较优的数据。低等级公路上的路侧行人、行人过街、支路出车侵扰的模型拟合优度R2均大于0.9;低等级城市道路上的行人过街侵扰影响下的速度拟合优度为0.749,其余均低于0.5,说明经典多元线性回归预测模型在车速预测方面不具有明显优势,难以达到理想预测精度。
3.2对数回归
为提高车速预测模型预测精度,考虑侵扰源与车速变化趋势,选用对数回归方法,拟合距侵扰源的“空间距离x”与“速差离散值Vdiff”关系,模型表达式如下。
对数回归分析(置信水平均小于0.1,置信度95%)结果如表4。低等级公路的路侧行人、行人过街、支路出车侵扰拟合优度达0.9以上,城市道路行人过街侵扰拟合优度为0.730,与表3结果基本一致,说明对数回归模型同样无法预测复杂场景下车速运行特征。
3.3三次回归
为了更好地预测路侧侵扰特殊路段车速运行规律,针对上述模型存在的拟合优度较低、显著性不高的问题,遴选可反映复杂非线性的三次回归模型如下:
三次回归分析(置信水平均小于0.1,置信度95%)结果如表5所示。可以看出拟合优度R2显著提高,仅低等级公路非机动车、城市道路路侧停车侵扰影响R2小于0.6,其他侵扰源影响拟合优度R2、显著性P值均较优,说明三次回归模型结构在车速预测方面具有明显优势,表现出更好的预测精度,可以较好地预测路侧侵扰源距离对车速的影响。
3.4模型驗证
采用统计学中常用的3项评价指标,即平均相对误差平均绝对误差均方根误差来验证三次回归模型的精度[26]。公式如下:
模型验证结果如表6所示。可以看出2类研究路段车速预测结果均较好,说明模型性能较为稳定,鲁棒性好。其中,低等级公路比城市道路速度预测结果更好,与前述车速行为特征一致。
4结束语
1)车辆临近侵扰源过程中车速均存在一定浮动,非机动车、路侧行人、路侧停车、行人过街、支路出车侵扰下车速分布分别为7~15 km/h、5~10 km/h、10~20 km/h、10~30 km/h、15~30 km/h,支路出车对于车辆运行影响最大。
2)相同侵扰源影响下,低等级城市道路车速较离散,车辆间速差较大,纵向干涉程度较高,更易发生追尾事故,相关部门应制定交通管制措施,以降低潜在风险和化解交通冲突。
3)基于自然驾驶实验数据,结合低等级道路交通运行特性,针对不同类别侵扰源影响下的车辆行为特性进行量化分析,并对路侧干扰影响下的道路交通运行演化过程进行探索,建立了低等级路段的路侧侵扰影响区车速预测模型,引入非线性三次回归模型,揭示了不同侵扰源影响下的交通行为发生机制,改善了侵扰区复杂环境的车速预测精度,为低等级道路路侧侵扰区车速管理提供理论依据。
4)实际交通场景中,低等级道路路侧侵扰存在多种侵扰源组合影响。本研究中根据车流数据多为单一侵扰源影响的特征,按侵扰源类型对车速的影响分别进行了分析和预测。待后续获取多种侵扰源组合影响的车流数据,还需进一步探索多种侵扰源组合影响下的车流状态变化机制。
参考文献
[1] 中华人民共和国交通运输部. 2020年交通运输行业发展统计公报[EB/OL]. (2021-05-19)[2022-03-15] http://www.gov.cn/xinwen/2021-05/19/content_5608523.htm.
Ministry of Transport of the Peoples Republic of China. Statistical bulletin on the development of the transport industry in 2020[EB/OL]. (2021-05-19)[2022-03-15] http://www.gov.cn/xinwen/2021-05/19/content_5608523.htm.(in Chinese)
[2] 任建洲. 小城镇过境公路技术研究[D]. 西安: 长安大学, 2011.
Ren J Z. The study of small town through-highway technology[D]. Xian: Changan University, 2011. (in Chinese)
[3] 杨金顺, 孙洪运, 李林波, 等. 道路交通系统恢复力研究进展综述[J]. 交通信息与安全, 2014, 32(3): 87-93.
Yang J S, Sun H Y, Li L B, et al. Review of road transportation system resilience research[J]. Journal of Transport Information and Safety, 2014, 32(3): 87-93. (in Chinese)
[4] 余博, 陈雨人, 付云天. 基于驾驶人视觉感知的低等级公路行车速度预测[J]. 同济大学学报(自然科学版), 2017, 45(3): 362-368.
Yu B, Chen Y R, Fu Y T. Driving speed prediction method for low-grade highways from drivers visual perception[J]. Journal of Tongji University (Natural Science), 2017, 45(3): 362-368. (in Chinese)
[5] 樊兆董, 李美玲, 冉晋, 等. 基于横向干扰度和交通事故数的车速预测模型构建[J]. 公路与汽运, 2021(2): 34-36, 42.
Fan Z D, Li M L, Ran J, et al. Construction of vehicle speed prediction model based on lateral disturbance degree and number of traffic accidents[J]. Highways & Automotive Applications, 2021(2): 34-36, 42. (in Chinese)
[6] Dong C J, Nambisan S S, Richards S H, et al. Assessment of the effects of highway geometric design features on the frequency of truck involved crashes using bivariate regression[J]. Transportation Research Part A: Policy and Practice, 2015, 75: 30-41.
[7] 曲大义, 陈文娇, 郭涛, 等. 考虑横向干扰的交叉跟驰模型研究[J]. 公路交通科技, 2015, 32(1): 122-127.
Qu D Y, Chen W J, Guo T, et al. Research on staggered car-following model considering lateral disturbance[J]. Journal of Highway and Transportation Research and Development, 2015, 32(1): 122-127. (in Chinese)
[8] 陈瑞, 张志清, 赵廷杰, 等. 基于驾驶员心率增长率的穿村镇公路平面线形安全评价[J]. 交通信息与安全, 2011, 29(3): 74-78.
Chen R, Zhang Z Q, Zhao T J, et al. Safety evaluation on horizontal alignment of through-village highway based on drivers growth rate of HR[J]. Journal of Transport Information and Safety, 2011, 29(3): 74-78. (in Chinese)
[9] Biswas S, Chandra S, Ghosh I. Effects of on-street parking in urban context: a critical review[J]. Transportation in Developing Economies, 2017, 3(1): 1-14.
[10] ?elik A K, Oktay E. A multinomial logit analysis of risk factors influencing road traffic injury severities in the Erzurum and Kars Provinces of Turkey[J]. Accident Analysis & Prevention, 2014, 72: 66-77.
[11] Chen Y H, Liu F H, Bai Q W, et al. Analysis of conflict factors between pedestrians and right-turning vehicles at signalized intersections[J]. Journal of Southeast University (English Edition), 2019, 35(1): 118-124.
[12] Bai L, Liu P, Chan C Y, et al. Estimating level of service of mid-block bicycle lanes considering mixed traffic flow[J]. Transportation Research Part A: Policy and Practice, 2017, 101: 203-217.
[13] Apasnore P, Ismail K, Kassim A. Bicycle-vehicle interactions at mid-sections of mixed traffic streets: examining passing distance and bicycle comfort perception[J]. Accident Analysis & Prevention, 2017, 106: 141-148.
[14] 赵磊, 张志清, 刘豪, 等. 穿村镇公路横向干扰关键因素识别[J]. 武汉理工大学学报(交通科学与工程版), 2019, 43(6): 1125-1129.
Zhao L, Zhang Z Q, Liu H, et al. Identification of key factors of horizontal interference of highway through towns and villages[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2019, 43(6): 1125-1129. (in Chinese)
[15] 徐进, 曾粤. 高速条件下隧道出入口行驶速度特性[J]. 交通运输工程学报, 2021, 21(4): 197-209.
Xu J, Zeng Y. Characteristics of driving speed at tunnel entrance and exit at high speed[J]. Journal of Traffic and Transportation Engineering, 2021, 21(4): 197-209. (in Chinese)
[16] 秦麗辉, 裴玉龙, 白崇喜. 自行车干扰下的城市干路路段通行能力与服务水平[J]. 哈尔滨工业大学学报, 2018, 50(9): 61-67.
Qin L H, Pei Y L, Bai C X. Capacity and LOS of urban arterial road segment under the interference of bicycle[J]. Journal of Harbin Institute of Technology, 2018, 50(9): 61-67. (in Chinese)
[17] Kalal Z, Mikolajczyk K, Matas J. Tracking-learning-detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(7): 1409-1422.
[18] 陈亦新, 王雪松. 山区高速公路组合线形路段车道偏移行为[J]. 中国公路学报, 2018, 31(4): 98-104.
Chen Y X, Wang X S. Effects of combined alignments of mountainous freeways on lane departure[J]. China Journal of Highway and Transport, 2018, 31(4): 98-104. (in Chinese)
[19] Yadav A K, Velaga N R. Investigating the effects of driving environment and driver characteristics on drivers compliance with speed limits[J]. Traffic Injury Prevention, 2021, 22(3): 201-206.
[20] Zheng C J, He R, Wan X, et al. The study on in-city capacity affected by pedestrian crossing[J]. Mathematical Problems in Engineering, 2016, 2016: 5271904.
[21] Ahmed M, Huang H L, Abdel-Aty M, et al. Exploring a Bayesian hierarchical approach for developing safety performance functions for a mountainous freeway[J]. Accident Analysis & Prevention, 2011, 43(4): 1581-1589.
[22] Fitzsimmons E J, Kvam V, Souleyrette R R, et al. Determining vehicle operating speed and lateral position along horizontal curves using linear mixed-effects models[J]. Traffic Injury Prevention, 2013, 14(3): 309-321.
[23] 趙鹏燕. 路侧干扰影响下低等级道路交通安全风险韧性研究[D]. 昆明: 昆明理工大学, 2022.
Zhao P Y. Study on risk resilience of low grade road safety under roadside interference[D]. Kunming: Kunming University of Science and Technology, 2022. (in Chinese)
[24] 谢济铭, 彭博, 秦雅琴. 基于换道概率分布的多车道交织区元胞自动机模型[J].交通运输系统工程与信息, 2022, 22(3): 276-285.
Xie J M, Peng B, Qin Y Q. Cellular automata model of multi-lane weaving area based on lane-changing probability distribution[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(3): 276-285. (in Chinese)
[25] 祝站东, 荣建, 周伟. 路侧干扰对运行速度的影响[J]. 北京工业大学学报, 2010, 36(11): 1524-1530.
Zhu Z D, Rong J, Zhou W. The impact of roadside interferences on operating speed[J]. Journal of Beijing University of Technology, 2010, 36(11): 1524-1530. (in Chinese)
[26] 袁华智, 阎莹, 袁志兵, 等. 考虑多因素修正的山区二级公路弯坡组合路段小型车运行速度模型[J]. 中国公路学报, 2022, 35(1): 286-297.
Yuan H Z, Yan Y, Yuan Z B, et al. Operating speed model of small car on combined horizontal and vertical curves of mountain secondary roads considering multi-factor correction[J]. China Journal of Highway and Transport, 2022, 35(1): 286-297. (in Chinese)
[27] 杨金燕. 城市道路坡道及弯道上的车速预测模型研究[D]. 重庆: 重庆交通大学,2019.
Yang J Y. Research on vehicle speed prediction model on urban road ramp and curved road[D]. Chongqing: Chongqing Jiaotong University, 2019. (in Chinese)
(编辑 罗敏)
猜你喜欢
大学教育(2017年1期)2017-02-13
科学与财富(2016年28期)2016-10-14
现代经济信息(2016年10期)2016-05-24
现代经济信息(2016年9期)2016-05-24
商(2016年13期)2016-05-20
黑龙江教育·高校研究与评估(2015年6期)2015-07-02
