
基于雷达测距的飞行器交会对接误差补偿控制技术
2024-05-17 11:56:34王康谊刘重光
计算机测量与控制 2024年4期
刘 霞,王康谊,刘重光
(1.中北大学 创新创业学院,太原 030051;2.太原市政建设集团有限公司,太原 030027)
0 引言
雷达是利用电磁波技术探测目标的电子设备元件,其发射出的电磁波在完成对目标对象的照射后,会再次返回到雷达设备之中,而这些回波信号中包含了大量的距离、径向速度、高度与方位信息[1]。对于激光雷达设备而言,其在实施目标测距的过程中,利用模数转换器装置对目标数据进行采样,又借助接收机元件将回波模拟信号转化为数字化波形信号,由于转换器与接收机负载于不同的回路单元,所以雷达装置在对目标对象进行测距的过程中,可以同时完成信息提取与波段传输指令。相较于其他类型的测距技术,雷达测距方法的实施不需借助除激光雷达以外的应用装置,且电磁波射线在照射到目标对象后,不需经历等待时间,可以直接经由信道组织反馈回核心处理主机[2]。整个测距过程中,主机元件能够掌握真实的目标测量信息,且由于没有其他条件的干扰,方位信息、距离信息等数据参量也并不会因为受到影响而出现错误传输或错误识别的情况,这也是利用雷达测距技术能够获得大量真实测量信息的主要原因。
飞行器是具有自主飞行能力的器械元件,根据飞行区域的不同,可以分为航天器、航空器、导弹、火箭等多种组成形式。飞行器对接就是指两个飞行设备在空间环境中完成连接的操作,由于地面基站对于飞行空间的控制能力相对较弱,所以在对接过程中,极易出现视线倾角、视线偏角等倾角误差向量,而这些偏转倾角会直接导致飞行器交会轨迹出现非精准对接的问题。
文献[3]提出基于干扰力矩补偿的空间飞行器姿态控制方法,分别从轨控推力偏心、推力偏移两个角度,对干扰力矩误差进行建模,再以角速度作为变量,求解姿态动力学方程,最后联合两者计算飞行器交会对接过程中的轨迹误差。文献[4]提出基于RBF神经网络滑模自抗扰的飞行器控制方法,提出了径向基函数思想,根据牛顿-欧拉方程,确定飞行器装置的位置与姿态,再联合RBF神经网络,对交会对接轨迹的误差进行补偿处理。然而上述两种方法对于视线倾角、视线偏角的控制能力有限,并不能完全解决飞行器错误对接的问题。
针对上述研究背景,提出基于雷达测距的飞行器交会对接误差补偿控制方法。
1 飞行器交会对接过程中的动力学作用条件
飞行器交会对接过程中动力学作用条件的求解,应在空间参考坐标系的基础上,求解轨道根数指标,再联合相关物理参数,定义动力学状态方程表达式。
1.1 参考坐标系
空间参考坐标系是为了确定飞行器飞行能力而定义的物理参考系,在不同方向上对参数指标进行取样,可以描述出飞行器设备的实时飞行状态。在飞行器轨迹交会对接的过程中,为准确定义误差方向角,要求所有飞行向量的取值都必须属于同一个参考坐标系空间[5]。为使所构建空间参考坐标轴能够与视线倾角、视线偏角边缘保持水平或垂直状态,在描述目标对象、飞行器设备所处空间位置时,必须同时定义横向、纵向与空间向参考坐标。完整的参考坐标系标记原则如图1所示。
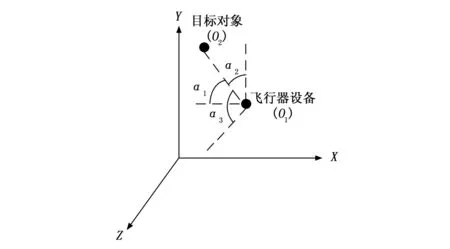
图1 参考坐标系标记原则
在飞行器交会对接过程中,定义飞行器设备所处位置的空间坐标为O1=(X1,Y1,Z1)、目标对象的实时空间坐标为O2(X2,Y2,Z2),且X1≠X2、Y1≠Y2、Z1≠Z2的不等式取值条件同时成立。将点O1、O2连接起来,并在点O2处分别作与X轴(横轴)、Y轴(纵轴)、Z轴(空间轴)平行的射线,其中X轴与O1、O2连线的物理夹角为α1、Y轴与O1、O2连线的物理夹角为α2、Z轴与O1、O2连线的物理夹角为α3,且α1、α2、α3的取值均不等于90°,联立上述物理量,可将飞行器交会对接过程中的参考坐标系定义式表示为:
(1)
如果飞行器交会对接过程由多个行为阶段共同组成,那么对于参考坐标系的定义就不能只考虑一种行为状态,但若这些行为轨迹不存在于同一个象限区域内,则应按照先横向、再纵向、最后空间向的原则进行计算[6]。
1.2 轨道根数
分析飞行器交会对接轨道时,通常假设飞行设备在地球中心引力场内保持匀速运动状态,由于对接过程中加速度参量的取值并不会发生明显的数值变化,所以空间引力、密度分布不均、非球形运动等摄动力因素都不会对交会轨迹内的视线倾角以及视线偏角造成影响[7]。轨道根数是影响飞行器交会对接轨道偏向误差的物理向量,其取值越大就表示参考坐标系内飞机轨迹路线与方向坐标轴之间的夹角数值越大[8]。在飞行器交会对接的空间参考坐标系内,轨道根数取值影响位姿转角的误差取值范围,进行位姿补偿处理的过程中,为有效控制视线倾角与视线偏角的数值水平,应使轨道根数指标的取值保持在(0,1)的数值范围之内。
规定δ表示飞行器交会对接轨迹内的飞行轨道转向参数,其定义式如下:
(2)

通过式(1)的参考坐标系定义式,建立空间参考坐标系,并确定参考平面和参考轴线,在此基础上联立式(2),可将飞行轨道转向参数转化为轨道根数的表达式形式,轨道根数求解结果表示为:
(3)

1.3 动力学状态方程
动力学状态方程是描述交会对接过程中飞行器飞行状态的动力学表达式,可以从横向、纵向、空间向3个方向上对飞行器行为轨迹进行描述。由于轨迹曲线内的每一个节点坐标都属于同一个区域性参考坐标系,所以在定义动力学状态方程时,必须以轨道根数指标作为核心判别条件[9]。对于动力学状态方程的求解满足下式:
(4)

规定W′表示补偿控制飞行器交会对接误差时所遵循的具体动力学作用条件,在实时飞行速率不等于零的情况下,式(5)所示的表达式恒成立:
(5)
飞行器飞行速率较小表示交会对接轨迹内的坐标轴夹角也相对较小,对其误差行为进行补偿控制时,仅需根据一次求导结果就能确定视线倾角、视线偏角与真实偏向角之间的差值水平;飞行器飞行速率较大则表示交会对接轨迹内的坐标轴夹角也相对较大,一次求导操作对于误差补偿向量的定义能力有限,并不能对视线倾角、视线偏角与真实偏向角之间的差值进行准确求解,故而这种情况下,必须对动力学状态方程表达式进行二次求导[10]。
2 基于雷达测距的对接误差控制
飞行器交会对接误差补偿控制技术方案的设计,以雷达测距原理作为理论基础,利用该项技术手段控制飞行器对接误差,需同时掌握理论飞行时长与雷达作用距离,并联合相关参数指标,求解精度极限的具体数值。
2.1 理论飞行时长

(6)
式中,γ为基于飞行器交会对接误差向量所选择的雷达测距系数。为避免雷达设备在飞行器单一交会对接轨迹内对误差补偿向量进行重复计数,理论飞行时间的取值不宜过大,但其实际数值却又不得小于二分之一的测距周期时长。
2.2 雷达作用距离
雷达光波段输出的电磁波信号就是测距所需的微波信号,其作用距离定义式的推导流程与微波雷达方程类似,在理论飞行时长周期内,求解激光大气传输因子、目标测距特性、光学传输特性、接收向量四类物理参数的乘积,就可以实现对雷达测距作用距离的计算。对接飞行器交会轨迹时,雷达信号发射机输出完整的脉冲信号波段,且波动参量在一个传输周期内可以多次取得波峰值,由于相邻波峰之间的时间长度不会大于一个理论飞行周期时长,所以雷达光波在测距过程中可以保持自由传输状态[13]。具体的雷达光波测距原理如图2所示。
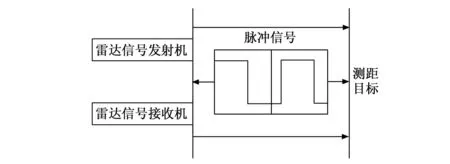
图2 雷达测距原理
信号接收机能够接收发射机输出的所有雷达信号,由于脉冲信号的波动过程中,雷达光波首先到达测距目标,在完成对接轨道误差检测后,波动信号才会按照脉冲曲线回到接收机之内,因为测距飞行器目标会消耗一定的信号参量,所以雷达设备所接收到的信号总量一定小于发射机元件的实时信号输出量[14]。
设p表示激光大气传输因子,ε表示目标测距特性参量,φ表示雷达脉冲信号的光学传输特性参数,a表示脉冲波接收向量,η表示雷达信号的利用效率,S1表示雷达脉冲信号的实时输出量,S2表示雷达设备接收到的脉冲信号总量。在上述物理量的支持下,联立式(6),可将雷达测距作用距离计算结果表示为:
(7)
随着测距目标与雷达信号发射机间隔距离的增大,光波信号在传输路径上的实时消耗量也会不断增大,当前情况下,求解所得的雷达测距作用距离结果也会不断增大。
2.3 精度极限值
精度极限值决定了雷达设备在测距飞行器对象时对于交会对接误差的补偿作用能力,由于雷达作用距离始终保持定值状态,所以精度极限直接影响补偿算法的最强作用能力。雷达测距原则对于补偿作用精度极限的求解,要求所输出光波信号必须保持量化状态[15]。雷达测距量化思想规定信号实际波长与其波段在测距方向上的投影长度必须相等,且同一波段周期内,不得出现两个传输方向不一致的信号参量。从数值一致性的角度来看,为避免精度极限值求解结果出现超限表达的情况,要求所涉及补偿向量必须属于同一个飞行器测距区域。对于雷达测距精度极限值的计算满足式(8):
(8)

3 对接误差的补偿控制方法
雷达测距技术对于飞行器交会对接误差的补偿与控制,还需在三坐标测量机结构模型中,对飞行器飞行位姿进行拟合处理,再联合位姿误差计算结果,确定与误差参数相关的补偿修正原则。
3.1 三坐标测量机结构模型
三坐标测量机模型是基于雷达测距原理定义的飞行器交会对接误差补偿控制模型。在空间参考坐标系内,三坐标测量机模型分别从横向、纵向、空间向3个方向上对飞行器对接轨迹进行测量,且由于测量交角之间保持两两垂直关系,所以即便在对接轨迹内随机选取交会节点,也可以保证所选择节点对象具有三自由度特征[17]。对于三坐标测量机模型而言,三自由度特征就是指交会节点在横向、纵向、空间向3个方向上均具有自由运行的能力,由于节点对象分布在对接轨迹之内,所以三坐标测量机模型能够对飞行器交会对接误差进行精准控制。设hX、jX表示两个随机飞行器交会点的横坐标,hY、jY表示两个随机交会点的纵坐标,hZ、jZ表示两个随机交会点的空间坐标,ιX表示横轴方向上的飞行器交会对接轨迹偏离度测量系数,ιY表示纵轴方向上的飞行器交会对接轨迹偏离度测量系数,ιZ表示空间中方向上的飞行器交会对接轨迹偏离度测量系数,且ιX≠ιY≠ιZ≠0的不等式取值条件恒成立。在上述物理量的支持下,联立式(8),根据雷达测距精度极限值的计算,可以得到精度极限值的取值范围,根据测量误差和精度极限值的取值范围,对误差进行补偿和控制,以确保飞行器交会对接的精度和可靠性。在此基础上推导三坐标测量机结构模型如式(9)所示:
(9)
如果飞行器视线倾角、视线偏角在某一方向上的数值水平较大,那么在定义三坐标测量机结构模型时,该方向上偏离度测量系数的取值也就相对较大,反之这种判断条件也成立,因此在对交会节点对接误差进行补偿处理时,可以根据偏离度测量系数取值来判断飞行器视线倾角、视线偏角的具体数值水平[18]。
3.2 飞行位姿拟合
飞行位姿拟合是在已知多个自变量与多个因变量离散点情况下,根据非线性模型来拟合运算出两类变量之间函数关系的过程,因非线性模型的运算具有不可逆的特征,所以函数表达式的反向递推关系不成立,即联立自变量系数,可以求得因变量结果,但已知因变量结果,无法反向求得自变量系数[19]。在三坐标测量机结构模型的基础上,按照雷达测距原则完善非线性表达式是实现飞行位姿拟合的必要环节。飞行器交会对接轨迹中,其运动行为不具有明确的规律性,所以自变量、因变量间函数关系的分析结果必然呈现非线性状态,但在特殊情况下(如飞行器的完全匀速运动状态),飞行器运动行为可以保持阶段性规律状态,此时求解所得的飞行位姿拟合结果也会与自变量、因变量之间的函数关系保持一致,因此非线性只是一种概括性思想[20]。对于飞行位姿拟合条件的求解参考如下表达式:
(10)

3.3 位姿误差
位姿误差是补偿飞行器交会对接误差时的核心控制对象,在符合飞行器运动位姿特征的情况下,可以将误差理解为由偏向角造成的差异性数值参量,由于飞行器运动行为向量的取值属于同一个数值区间,所以补偿控制技术的实施,要求位姿误差参数的排列必须符合由小及大的原则[21]。设vX为飞行器运动偏向角误差向量在X轴方向上的数值分量,vY为飞行器运动偏向角误差向量在Y轴方向上的数值分量,vZ为飞行器运动偏向角误差向量在Z轴方向上的数值分量,vXYZ为飞行器运动偏向角误差向量在空间参考坐标系中的实际取值,μXYZ为飞行器运动位姿标记参量在空间参考坐标系中的实际取值,ΔM表示飞行器对接转角误差的单位累积量。在上述物理量的支持下,联立式(10),推导位姿误差计算式如下:
(11)
在空间参考坐标系中,vX≠0、vY≠0、vZ≠0的不等式取值条件同时成立,表示飞行器对接转角误差在X轴、Y轴、Z轴方向上的取值均不等于零,这种位姿限定条件决定了飞行器交会轨迹在对接角误差作用下呈现出闭合曲线的表现状态[22]。对于雷达装置而言,其在测距飞行器对象的过程中,并不需要真实记录整条交会对接轨迹,而是可以根据相邻对接转角直接的误差关系,推断轨迹内误差向量的具体数值,从而实现对视线倾角、视线偏角等接角误差参量的补偿性控制。
3.4 误差参数的补偿修正

(12)
雷达测距模型的应用,要求同一参考坐标系空间内,不得出现两个方向不同的交会对接角度量值,然而飞行器运动行为并不具有明确的方向性,所以上述修正条件极难成立[24]。交会对接角偏转方向与飞行器飞行方向相反时,交会对接角度量值小于零,当前情况下,为实现对误差参数的补偿修正处理,应在飞行器飞行反方向上选择一个与交会对接角数值相同的误差参数向量作为补偿修正对象。
4 实例分析
为解决由视线倾角、视线偏角造成的飞行器错误对接问题,实现对飞行器交会轨迹对接行为的精准控制,设计如下对比实验。
4.1 实验环境与原理
视线倾角、视线偏角是造成飞行器错误对接问题的主要原因,而这两类转向角的数值水平直接影响基站主机对飞行器交会轨迹对接行为的控制能力,通常情况下,视线倾角与视线偏角的数值水平越小,就表示飞行器错误对接问题的出现概率越小,基站主机对飞行器交会轨迹对接行为的控制能力越强。
本次实验的具体实施原理如图3所示。
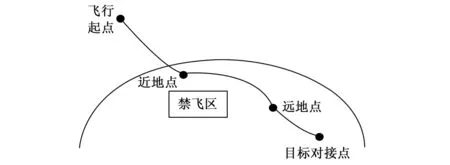
图3 飞行器交会对接原理
由于主体飞行器设备、受体飞行器设备所处飞行轨迹不同,且二者之间存在一定的高度差,所以在轨迹交会对接过程中,视线倾角与视线偏角的取值都不可能等于零。图4反映了视线倾角、视线偏角的具体形成原因。
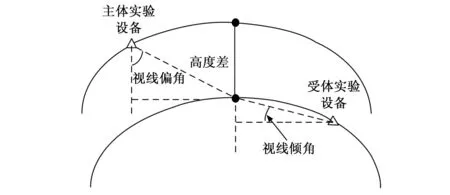
图4 视线倾角、视线偏角成因
为避免其他因素对实验结果造成影响,在测量视线倾角、视线偏角时,严格规定主体飞行器、受体飞行器的运动路线,且要求二者在实验过程中只能按照预设轨迹进行飞行任务。
4.2 实验步骤及实验条件
该技术的实验条件如下:
1)雷达测距装置:需要使用能够精确测量飞行器位置和速度的雷达设备,选择SW-E40激光测距仪,进行相关的校准和测试。
2)分别选用 S0N-003型号飞行器和 Volocopter2X型号飞行器作为主体和受体实验设备,使用该型号的飞行器进行对接操作和误差补偿控制测试,使用具有真实尺寸和重量的飞行器模型,以便进行实际的对接操作和误差补偿控制测试。
3)三坐标测量机:可以使用三维测量仪器来测量飞行器在空间中的位姿,以评估误差的大小和方向。
4)计算机系统:在Matlab仿真软件处理雷达数据和飞行器动力学模型,进行误差补偿控制计算和实时监测。
5)实验室环境:需要在恰当的实验室环境中进行实验,以保证实验结果的准确性和可靠性。需要准备好适合S0N-003和Volocopter2X飞行器的实验室设备和工具,例如起降平台、安全绳索、遥控器等。
在上述实验条件下,设计本次实验的具体执行流程如下:
1)选择S0N-003型号的飞行器作为主体实验设备、Volocopter2X型号的飞行器作为受体实验设备。
2)应用基于雷达测距的飞行器交会对接误差补偿控制技术控制飞行器运动行为,记录主、受体实验设备对接过程中,视线倾角、视线偏角的数值变化情况,所得结果记为实验组转向角参数。
3)应用基于干扰力矩补偿的空间飞行器姿态控制方法控制飞行器运动行为,记录主、受体实验设备对接过程中,视线倾角、视线偏角的数值变化情况,所得结果记为对照(1)组转向角参数。
4)应用基于RBF神经网络滑模自抗扰的飞行器控制方法控制飞行器运动行为,记录主、受体实验设备对接过程中,视线倾角、视线偏角的数值变化情况,所得结果记为对照(2)组转向角参数。
5)整理所得转向角数据,总结实验规律。
4.3 数据处理
图5反映了实验组、对照组飞行器视线倾角与视线偏角的具体实验数值。
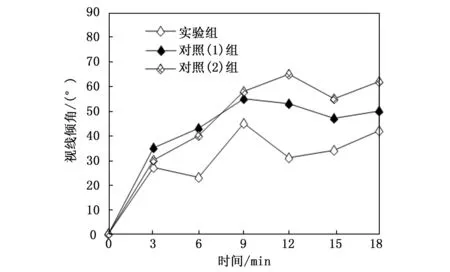
图5 飞行器视线倾角
分析图5可知,第9 min时,实验组飞行器视线倾角取得最大值45.0°,其他实验结果均属于0~45.0°之内。第9 min时,对照(1)组飞行器视线倾角取得最大值55.1°,相较于实验组,其最大值提升了10.1°,而对照(1)组其他实验结果则属于0~55.1°之内。第12 min时,对照(2)组飞行器视线倾角取得最大值64.9°,相较于实验组,其最大值提升了19.9°,也明显高于对照(1)组的最大值结果,而对照(2)组其他实验结果则属于0~64.9°之内。
分析图6可知,第15 min时,实验组飞行器视线偏角取得最大值22.1°,其他实验结果均属于0~22.1°之内,相较于视线倾角,实验组飞行器视线偏角的均值水平略低。第3 min时,对照(1)组飞行器视线偏角取得最大值50.3°,相较于实验组,其最大值提升了28.2°,而对照(1)组其他实验结果则属于0~50.3°之内。第18 min时,对照(2)组飞行器视线偏角取得最大值36.8°,相较于实验组,其最大值提升了14.7°,而对照(2)组其他实验结果则属于0~36.8°之内。
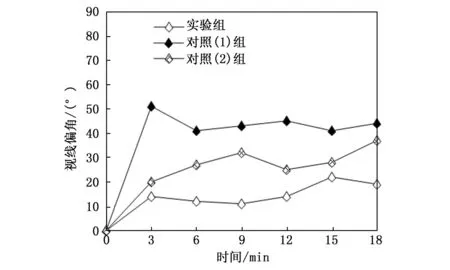
图6 飞行器视线偏角
综上可得,基于干扰力矩补偿的空间飞行器姿态控制方法、基于RBF神经网络滑模自抗扰的飞行器控制方法的应用,不满足有效控制飞行器视线倾角、视线偏角的需求,故而其在解决飞行器错误对接问题方面的应用能力也就相对较弱,不能够实现对飞行器交会轨迹对接行为的精准控制。相较于上述两种方法,基于雷达测距的飞行器交会对接误差补偿控制技术的应用,可以有效解决由视线倾角、视线偏角过大造成的飞行器错误对接问题,实现飞行器交会轨迹的精准对接。
5 结束语
飞行器交会对接误差补偿控制技术以雷达测距原则为基础,在定义参考坐标系表达式的同时,求解动力学状态方程,又联合精度极限值条件,对飞行位姿进行拟合处理。实验结果表明,应用基于雷达测距的飞行器交会对接误差补偿控制技术,可以有效控制视线倾角、视线偏角的取值范围,既解决了飞行器错误对接的问题,又能够实现对飞行器交会轨迹对接行为的精准控制,符合实际应用需求。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:06
特区文学·诗(2021年6期)2021-12-22 01:02:51
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
当代水产(2019年1期)2019-05-16 02:41:10
物理教学探讨(2018年1期)2018-02-13 09:26:52
金色少年(奇趣科普)(2017年11期)2017-11-28 05:41:41
太空探索(2016年9期)2016-07-12 09:59:53
当代贵州(2015年19期)2015-06-13 09:42:32
新疆农垦科技(2014年9期)2014-02-28 19:21:04
