复杂海洋环境下无人船仿真教学平台设计
2024-05-15 13:22吕成兴王子晨于海生杨智博
实验室研究与探索 2024年3期
吕成兴,王子晨,于海生,陈 健,杨智博
(1.青岛理工大学信息与控制工程学院,山东青岛 266520;2.青岛大学自动化学院,山东青岛 266071)
0 引言
机器人技术是新工科的前沿交叉学科,融合了自动化、机械、计算机和通信等学科,是我国新工科专业建设的重点发展学科。同时,为满足机器人产业发展的需求,国内高校相继设立了机器人工程专业。该专业的主要培养目标是培养适应机器人产业发展的创新型人才,要求学生具备卓越的综合设计能力和实践能力[1-3]。为满足机器人工程专业高素质人才的培养需求,需要设计更加新颖的实验教学方案[4]。
移动机器人作为机器人工程专业的授课重点,在教学中以理论讲授为主,学生缺乏实践操作[5-7]。有些高校受限于专业建设经费,实验平台也很难及时更新。近年来,水下自主航行器和无人船作为典型的移动机器人平台得到了广泛应用,如港口导航、海洋环境监测、海洋测绘和海洋科学研究等应用领域。为适应国家加快建设海洋强国的战略,培养熟悉海洋机器人的专业人才成为迫切需要。在海洋机器人教学和研究中,控制算法的控制效果需要在恶劣的海洋环境中测试。但无人船实验平台造价较高,操作复杂并有一定的危险性,导致实验资源匮乏。综上所述,无人船实验平台研发周期长、风险高,且受实际海洋环境约束,高级控制算法难以开展测试。因此,无人船物理仿真平台的研究受到了广泛关注。
物理仿真平台在机器人工程专业的研究及教学中发挥至关重要的作用,它是快速有效进行机器人本体和控制算法开发的重要工具。无人船物理仿真平台的主要挑战之一就是需要模拟复杂的海洋环境干扰,比如波浪、风和海流。为了进行无人船导航、制导以及控制算法的测试,需要一个标准的物理仿真平台。目前,Gazebo[8],RobotX Simulator[9],“FreeFloating”插件[10],V-REP,UWSim[11],USVSim[12]等物理仿真平台具备一部分无人船仿真的能力(见表1)。大多的无人船仿真平台仍然不能全面模拟复杂的海洋环境。利用USVSim平台能够全面仿真风浪流等复杂扰动,改进软件平台,构建了扰动、机器人操作系统(Robot Operating System,ROS)节点,实现无人船的实时物理仿真。

表1 6 种无人船物理仿真平台性能比较
本文旨在提升机器人工程专业学生实践能力,尤其解决高校相关实验教学环节相对薄弱的问题。开发设计基于USVSim 软件的无人船物理仿真平台,并搭建相关实验场景。该仿真平台能模拟复杂海洋环境,提供无人船建模、参数辨识、运动控制、路径规划等多种实验任务。学生可利用该仿真平台进行自主设计试验方案,深入研究高级控制算法,提升解决移动机器人领域复杂工程能力。弥补实验教学的不足,为学生提供更为丰富的实践体验,培养其应对现实工程挑战的能力。
1 无人船的数学模型
在实际场景中,无人船在六自由度进行运动,即沿纵向、横向和垂直方向的运动以及围绕3 个轴线,进行滚动、俯仰和偏航运动。为分析方便,忽略垂直、滚动和俯仰运动,系统模型简化成三自由度模型。运动速度向量可分别在大地坐标系{e}和船体坐标系{b}下描述,如图1 所示。
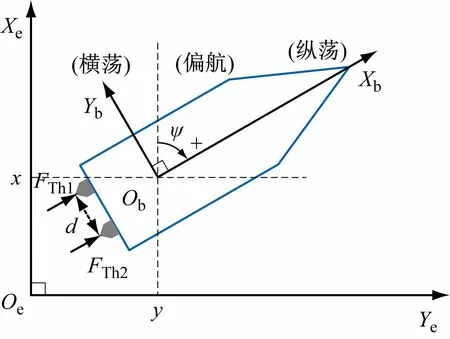
图1 无人船运动坐标系描述
三自由度无人船的数学模型[13-14]:
式中:m为船体质量;d为推进器间距;(x,y,ψ)、(u,v,r)分别为无人船在纵向、横向和偏航方向的位置和速度;Iz为船体在z轴的转动惯量;Xu、Yv、Nr、Xu˙、Yv˙、Nr˙为相应的水动力系数。将式(1)、(2)整理为相应的矩阵形式:
式中:τ为推进力;τd为外部环境扰动;J(η)为旋转矩阵;M为附加质量参数的惯性矩阵;C 为科式力和向心力矩阵;D为水动力阻力矩阵。
无人船后部安装2 个螺旋桨推进器,其动力分配
风扰动是无人船主要的外部环境干扰之一。风扰动对无人船的运动既有可能是阻碍性也有可能是帮助性,取决于风向。为研究风扰动对无人船运动的影响和仿真,使用由Fossen 建立的风的纵向和横向模型,分别作用于无人船水线以上部分的正面和横向区域。设Vew=[Vwx,Vwy]T为大地坐标系{e}描述下的风速矢量,Vbw=[Vw,γw]T为船体坐标系{b}描述的风速矢量。由风扰动导致的作用于无人船中心的风扰动推进力为
式中:γw=ψ -βw为船体坐标系{b}描述下风相对于无人船的攻角;βw为在大地坐标系{e}描述下的风向角;AFw、ALw分别为正面和侧面的投影面积;q为风引起的动态压力,
式中,ρa为空气密度。通过式(6)、(7),得到无人船在船体坐标系{b}下的风的扰动公式为
海流扰动是海洋环境中常见的一种扰动。它既有可能对无人船的运动产生有益的影响,也可能产生阻碍的影响。通过分析无人船的速度矢量和流速矢量的关系来建立相关的模型:
海浪的成因复杂,如由海风引起的海面波动形成风浪。海浪的运动是复杂、无规则过程,且包含能量信息。对于无人船的运动控制,主要是由二阶波浪力产生的干扰
式中:L为无人船长度;α 为海浪振幅;χ 为海浪波相角;λ为海浪波长;CXw、CYw和CNw分别为海浪系数。
2 无人船物理仿真平台的设计与实现
物理仿真平台在无人船的原型快速开发上发挥着至关重要的作用。由于仿真器性能的不同,在开发特定的任务或者场景之前,应该选择合适的物理仿真平台。USVSim 平台使用机器人操作系统(Robot Operationg System,ROS),Gazebo 物理仿真引擎和UWSim物理仿真引擎来构建,其系统架构如图2所示。
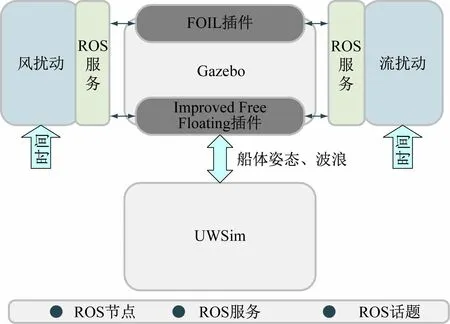
图2 仿真平台系统架构
对USVSim 的扰动处理部分进行改进,将风扰动和海流扰动整合到同一个ROS节点(disturb节点),使用式(8)、(10)进行计算,便于后期处理及可视化显示。风扰和海流扰动通过ROS 服务消息传送到FOIL插件和改进的Free Floating 插件。通过这种方式,将海洋环境扰动加载到物理仿真器。Gazebo 作为主要物理仿真模拟引擎,UWSim作为可视化引擎。软件的ROS节点信息如图3 所示。
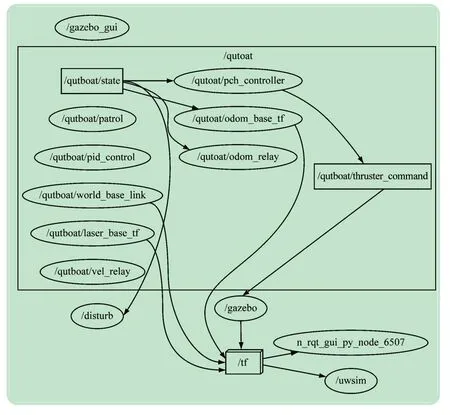
图3 无人船ROS节点信息
由于Gazebo 不能仿真海浪的信息,使用UWSim通过快速傅里叶变换来仿真海浪的信息。UWSim 仿真器并不能将无人船在Z轴平面上的信息变换共享给其他仿真器,通过USVSim 平台将波浪信息从UWSim读取出来,并通过Free Floating 插件改变无人船的姿态,对信息所有的Gazebo 插件发布。开发了绘图节点用来绘制物理仿真数据,具有读取存储的bag文件功能。无人船在仿真器中的场景如图4 所示。
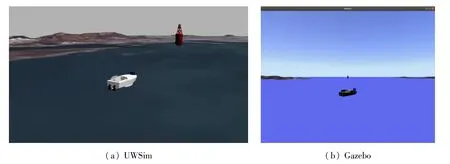
图4 无人船在仿真器中的实验场景
3 实验结果与分析
使用无人船物理仿真平台进行场景仿真。无人船动力分配为差速驱动形式,物理参数见表2。
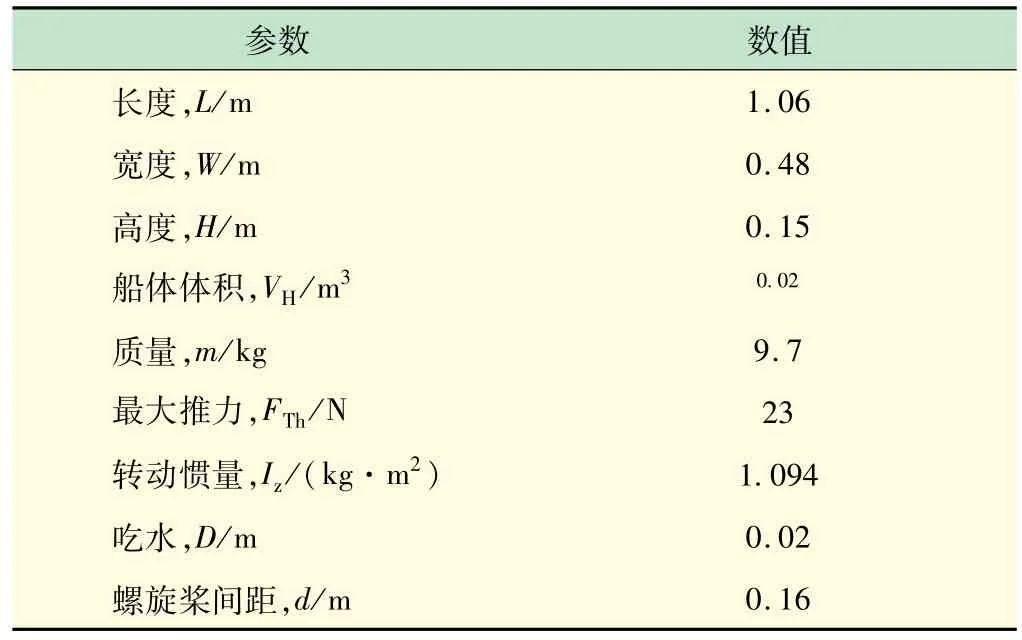
表2 无人船参数表
通过船物理参数,可计算出附加质量参数,使用物理仿真平台获取动态系数。无人船的附加质量参数[15]:
使用物理仿真平台来辨识无人船水动力参数dii,设计场景1 为最大推力的直线运动辨识参数d11,设计场景2 让无人船做圆周运动可以辨识参数d22,设计场景3 让无人船绕Z轴旋转可以辨识参数d33,设计场景4 验证海洋环境扰动对无人船运动的影响。
3.1 直线运动场景实验
为辨识水动力参数d11,设计无人船直线运动仿真场景,实验结果如图5 所示。在此场景仿真中,忽略所有的干扰,对无人船施加最大的推力(FTh1=FTh2=11.5N)。当无人船纵向速度达到最大时,u˙=v=r=0,umax=1.35 m/s。由式(2)、(3)可知,
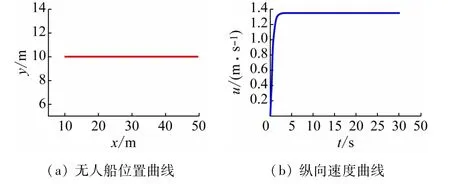
图5 无人船直线运动仿真曲线
3.2 圆周运动场景实验
为辨识水动力参数d22,设计无人船绕圆周运动仿真场景,实验结果如图6 所示。在此场景仿真中,忽略所有的干扰,无人船推力分配为FTh1=11.5 N,FTh2=0 N。
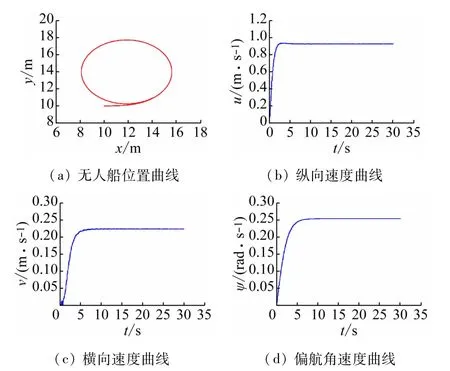
图6 无人船圆周运动仿真结果
由仿真结果可见,系统达到稳态时,横向加速度变为零,横向最大速度vmax=0.22 m/s,可通过式(2)、(3)计算:
3.3 绕轴运动场景实验
为了辨识水动力参数d33,设计无人船绕Z轴运动仿真场景,实验结果如图7 所示。无人船的推力分配为:FTh1=11.5 N,FTh2=-11.5 N。由仿真结果可见,在达到稳态时ψmax=0.366 m/s,r˙=u=v=0。可以通过式(2)、(3)计算:
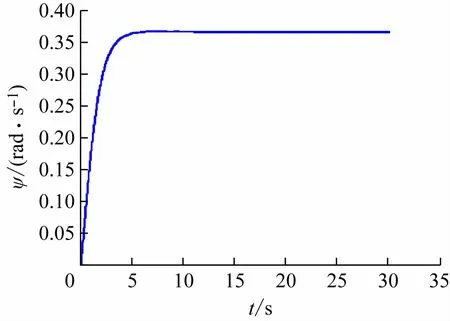
图7 无人船绕Z轴运动仿真结果
3.4 海洋环境扰动实验
为验证外部扰动对无人船的影响,设计无人船海洋环境扰动。开始启动时,对无人船施加最大的推力(FTh1=FTh2=11.5 N)。在t=5 s时,加入风扰动(0.4 m/s,30°)和海流扰动(0.4 m/s,45°)。由图8 可见,无人船在0~5 s时,沿直线运动,在5 s 后,由于受到风和海流扰动,运动轨迹变为曲线。所设计的物理仿真教学平台可以真实的反映无人船受到海洋环境干扰的运动情况。
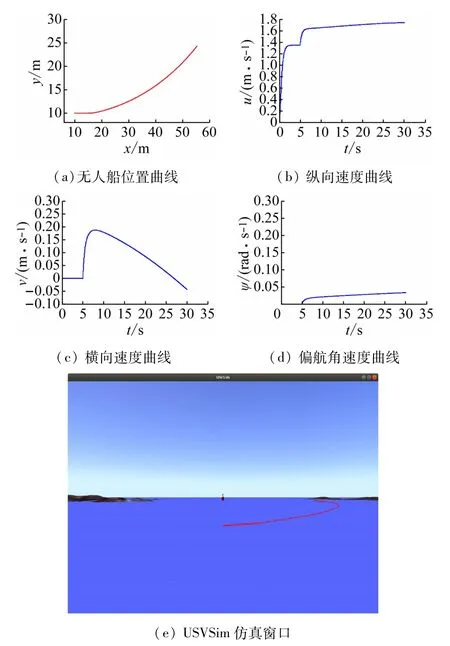
图8 无人船受到扰动时仿真结果
4 结语
无人船物理仿真平台已在校机器人工程和自动化两个专业核心课程“机器人基础原理”和“机器人三维建模与仿真”仿真教学使用。本文所设计的无人船物理仿真平台,利用开源ROS 和物理仿真引擎,构建复杂海洋环境下的无人船物理仿真场景,实现无人船模型搭建、海洋环境扰动模拟、模型动力学参数辨识和控制算法验证等功能。该平台可扩展实现激光雷达导航、虚拟现实场景生成等功能。该物理仿真平台能满足机器人专业研究探索型实验对实验平台的需求,解决机器人教学中存在的硬件约束、场景单一等问题,并且该仿真平台具有较好的成果转化推广价值。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2019年4期)2019-10-10
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
贵州师范学院学报(2016年3期)2016-12-01
电源技术(2015年11期)2015-08-22
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07