基于CarSim/Simulink的计算机控制系统综合实验设计
2024-05-15 13:22闻继伟栾小丽
实验室研究与探索 2024年3期
闻继伟,陈 珺,栾小丽,徐 琛
(江南大学物联网工程学院,江苏无锡 214122)
0 引言
计算机控制系统(以下简称计控)是自动化专业的专业核心课程。该课程涉及计控的基本概念和基础理论,计控的特性分析,连续系统的离散化,离散系统的稳定性、能控性、能观性分析,常规及复杂控制技术,计控设计与实现等内容,具有理论性强、涉及面广、理论联系实际的突出特点[1-2]。其实验教学大多仍局限在抽象数学模型的计算机仿真;实验内容与教学内容相对应,从模型到模型,缺少具体的被控对象;学生难以获取感性的工程常识,从理论走向实践,形成解决复杂工程问题的能力。探索和设计基于工程对象的计控综合实验内容很有必要。
叶希立等[3]针对三容水箱计控平台成本高和难以推广应用的问题,提出微型化设计方式,即上位机使用Matlab GUI 软件开发各类相关的计控实验,实现系统体积小、功能全、算法开放等优点。李敏等[4]采用C8051 微处理器,设计电加热炉温度控制与步进电动机的电流正弦波细分控制系统,将嵌入式系统设计引入计控实验。李建宁[5]基于Matlab、WinCon、Phantom omni和Novint Falcon,搭建双边遥操作系统实验平台,实现计控实验的软硬件一体化。在当前教学环境中,学生在进行实物或半物理仿真平台的综合性实验时,面临诸多挑战。此类实验需要大量资金投入,同时实验时间的安排也颇具难度。专业课教师在指导过程中需投入大量时间和精力。由于人力资源的限制,实践经验的传承面临难题。在实验过程中,学生不仅可能遭遇软硬件方面的预料之外的问题,过度关注技术细节也可能影响理论知识的巩固和实践能力的培养。
深化并进一步改善文献[6-8]中的教改理念,要求自动化专业学生根据所学的计控课程内容,基于车辆的巡航、跟随和避障等应用场景,利用CarSim 搭建合适的车辆模型,和Simulink接口互通,在Simulink中完成计算机控制算法,并模拟控制,完成计控课程的模型仿真与控制实现,促进学生相关控制类课程的知识融合。初步尝试表明,基于CarSim和Simulink的联合仿真投入成本相对较低,可操作性强,学生反馈情况好。
CarSim是针对车辆动力学的仿真软件,近年来受到广泛关注。4 轮驱动车双模式自适应巡航控制[9],汽车运行状态直接感知或观测器设计[10],操纵稳定性控制[11-13]等一系列技术的涌现,给计控理论的应用提供了新的广阔空间。这项实验包括:
(1)分析小车的工作原理,对其机理建模,得到一组非线性微分方程,即小车的动力学模型。
(2)对该动力学模型进行运动学简化分析(即将其简化处理为局部线性微分方程组),并基于简化模型设计反馈控制器。
(3)为验证反馈控制效果,采用CarSim 和Simulink软件进行联合仿真。
上述基于CarSim/Simulink 的综合实验设计思路与实验流程如图1 所示。
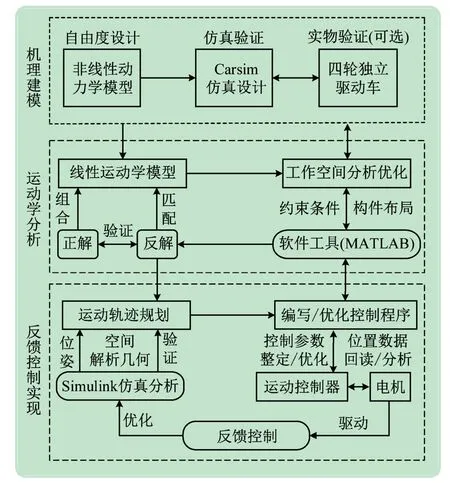
图1 基于CarSim/Simulink的综合实验设计
1 4 轮独立驱动车建模与运动学分析
4 轮独立驱动车机理建模是对其各部分运动机理进行分析,根据小车所遵循的力学和运动学规律得出相应的数学模型。一般而言,与实际小车运动规律吻合度较高,复杂度相对较低的系统模型有利于训练学生系统建模和控制器综合。出于合理简化的考虑,每次实验都固定小车的2 个前轮,只改变小车后轮的偏航角。在小车非线性动力学模型的基础上,作合理的线性化,可让学生避免陷入复杂的数学建模和深奥的数理分析,便于掌握计控的基本原理和仿真的基础技能。
模拟小车由底盘、电子控制单元、电池和4 个与底盘相连的独立的轮内驱动电动机组成。前后轮与地面的接触点都位于轮子中心的垂直线上,不存在轮子的侧向偏移,转向系统和转轮之间没有机械连杆。为便于分析,建立3 自由度坐标系,纵向轴(X)、水平轴(Y)和偏航轴(Z)。依据如图2 所示的小车纵向、横向和航向角方向的动力学规律,建立运动学方程组。
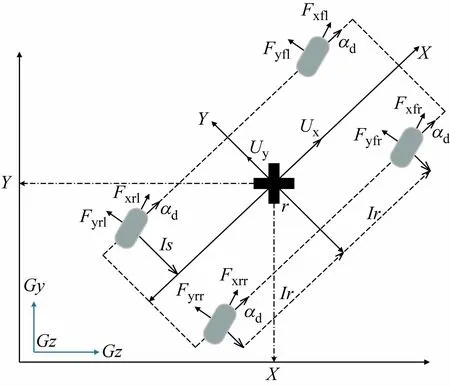
图2 4轮独立驱动车模型简化图
该方程组忽略了横摇和俯仰运动对小车动力学的影响,可用于捕捉小车的线性运动学模型[14]。该模型的动力学方程:
式中:Ux、Uy和r分别为小车的纵向速度、水平速度和偏航角速度;lf、lr分别为车辆重心到后轮中心的距离;ls为车辆重心到前轮中心的距离;Fxfl、Fxfr、Fxrl、Fxrr、Fyfl、Fyfr、Fyrl和Fyrr分别为左前、右前、左后、右后轮胎的纵向和横向轮胎力;m为小车的质量;Md为由路面不平引起的干扰;J为车辆的转动惯量。假设轮胎实际行驶方向和车轮指向的前进方向对轮胎纵向滑移会产生影响。在文献[15]中,轮胎在车轮-地面接触方向上的纵向滑移和侧滑移分别记为
式中:rw为每个车轮的有效半径;wi为第i个车轮的转动角速度。
具有路面附着干扰的小滑移角区域下的轮胎模型为:
在该区域内,纵向滑移和侧滑移分别与纵向轮胎力Fxi和横向轮胎力Fyi成正比;Cxi为纵向轮胎刚度;Cyi为轮胎横向过弯刚度;μ 的值取决于道路附着系数。这个轮胎模型捕捉了车轮、轮胎和地面相互作用的基本动力学,在轮胎刚度值较大的情形下,可合理地将路面-轮胎接触点附近近似为线性动力学区域。学生可使用CarSim软件直观地感受4 轮独立驱动车的参数变化,实现个性化选择,搭建车辆模型,和Simulink 接口互通,在Simulink中完成控制算法,如图3 所示。
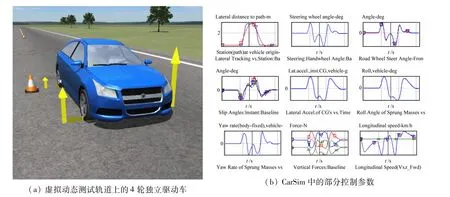
图3 4轮独立驱动车及其在CarSim中的部分控制参数
基于CarSim的计控综合实验采用机理分析法建立小车的近似线性模型,不可避免地存在模型复杂度和精度之间的矛盾,即小车的动力学模型精度越高,其相应的复杂度也越高。同时,模型的阶次也会提高,而高阶系统又会增加计控实验分析与设计的难度。所以在计控课程实验中,尤其是面向本科学生,在满足一定控制要求的前提下,应尽量使计控系统模型简单,确保实验可行;同时也引导学生思考小车非线性模型的线性化和反馈控制方式的选用对小车整体控制性能会产生哪些影响。
假设纵向速度Ux为常数,小车的整体动力学可以用2 个自由度Uy和r来表示。同时,通过小角度近似,结合式(1)~(7),可以得到紧凑的线性状态空间表达式:
其中,r为测量输出。控制输入为左、右轮轮速之差。纵向速度Ux,车辆质量m,转动惯量J和轮胎刚度是决定车辆动力学的重要参数。轮胎与地面接触的不均匀性可以建模为扰动项Md。车载传感器可以测量纵向、横向速度和偏航率。
2 H∞动态输出反馈设计
控制器的设计目标是在纵向速度和路面附着系数发生相对变化时,抑制偏航扰动。当可测量车辆的完整信息时,设计如下H∞动态输出反馈控制器(也可选用其他反馈控制方式,比如状态反馈、静态输出反馈等):
结合式(8)~(10),可得如下增广系统:
实验目的是设计一个形式如式(9)所示的H∞动态输出反馈控制器,且满足性能指标:
(1)增广系统(11)渐近稳定。
式中:ω∈L2[0,∞];γ >0 是干扰抑制水平。
控制器设计可转化为求解线性矩阵不等式,
控制增益
式(13)、(14)的推导可参考文献[16]。由于课程采用计算机控制技术,取采样时间为0.1 s,构造如下离散时间动态输出反馈控制器
施加到被控对象,验证控制效果。
3 控制实例
表1 给出了用于Matlab-Simulink 仿真的小车参数。控制目标是减少驾驶员在驾驶车辆沿着预期路径行驶时所付出的努力。控制输入是来自小车右侧和左侧的速度差,其目的是确保车辆即使在存在外部干扰的情况下也保持在直行轨道上。控制器设计考虑μ=0.5,车辆的行驶速度为30 km/h,用带限白噪声来表示具有适当噪声水平的外部扰动。使用非线性模型(1)~(3)作为仿真对象,基于线性模型式(8)设计H∞动态输出反馈控制器。
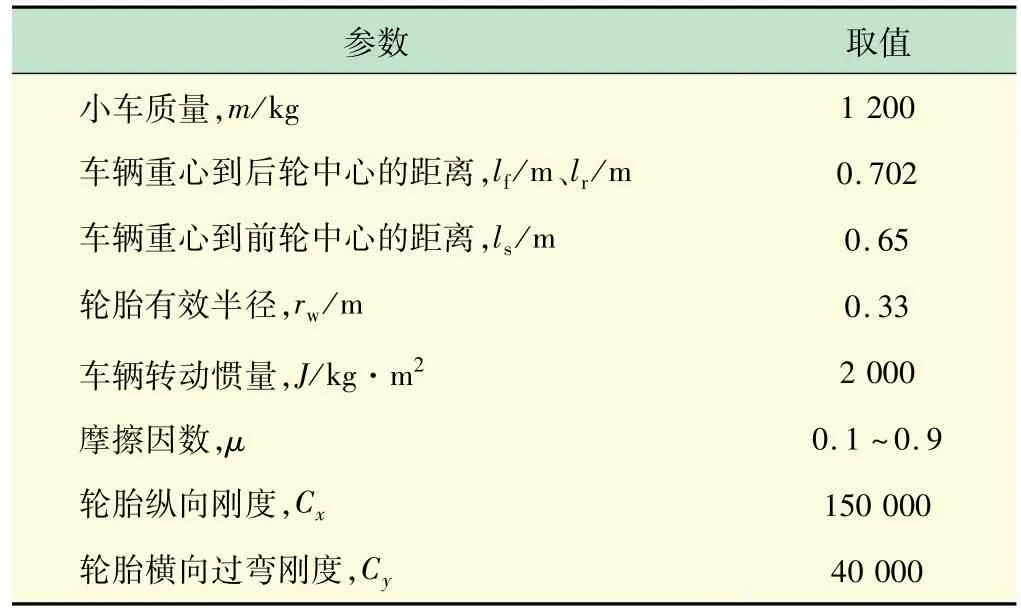
表1 车辆仿真参数
求解线性矩阵不等式优化问题式(13)~(14),可解得控制增益:
CarSim/Simulink 联合仿真原理如图4 所示。学生可根据该原理用CarSim 生成小车模型,搭建Simulink仿真模块,验证反馈控制器的实际控制效果。实验仿真假设小车沿路面直线行驶,将仿真结果与期望值车速和偏航角作比较,验证控制算法的有效性。
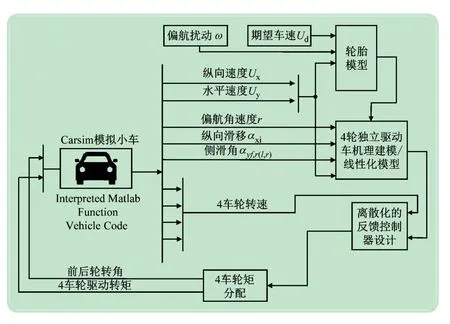
图4 联合仿真原理图
考虑到车轮电动机的动态特性可通过精确测量电流来直接监测,这能精细调节左右侧轮速,以确保控制系统能够引导车辆沿预定路径行驶。控制器在扰动引入时被激活,在此之前,小车直线行驶,左、右轮速度相等。图5 给出了自治小车和H∞动态输出反馈控制下小车的运行轨迹比较。在注入干扰的情况下,没有施加离散化H∞控制的小车运行轨迹会极大地偏离预设水平航向(如红线所示),施加控制作用的车辆轨迹基本保持在固定航向上(如蓝线所示),说明反馈控制器有较强的干扰抑制能力。
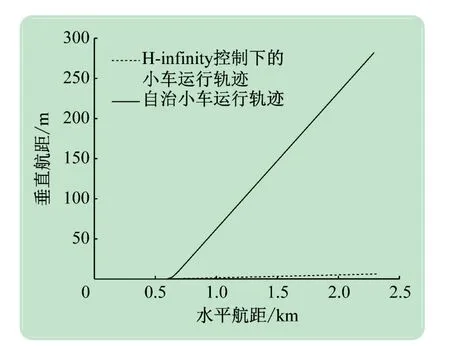
图5 小车运行轨迹对比
作为计控课程实验,可鼓励学生选取不同的条件进行仿真,从不同的角度验证和对比分析,以减少实验误差,增加实验仿真结果的可靠性;同时也可帮助学生更好地了解不同实验组之间的差异,为进一步学习和研究提供有价值的指导。可在特定时间向小车注入偏航扰动和控制作用,改变轮胎附着力的物理取值范围μ=0.1~0.9,改变车辆速度等,来测试反馈控制器在不同应用场景中的性能,特别是在路况处理的极限条件下,是否依然能实现期望的控制目标。在控制器持续注入偏航干扰的行驶区间范围内,小车的航行轨迹何时偏差最小?轮胎的非线性区域边界值在何处?具体的实验过程可以作为综合实验的一部分或者是课后拓展练习。
4 结语
为适应“工程教育认证”背景下自动化专业课程建设新要求,利用当下成熟的标准化软件资源CarSim,改善计控课程的实践教学与仿真,设计了一套完整的综合性实验,包括4 轮独立驱动小车的数学建模、非线性动力学模型的合理线性化、反馈控制器设计与航向保持等内容。在计控课程中融入工程元素,启发学生进行深入思考和学习。
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
童话世界(2019年14期)2019-06-25
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
幼儿教育·父母孩子版(2017年12期)2018-02-28
橡胶工业(2015年4期)2015-07-29
橡胶工业(2015年4期)2015-07-29
浙江大学学报(工学版)(2015年2期)2015-05-30