直升机振动主动控制方法研究综述
2024-05-09 03:14杨一凡
电光与控制 2024年5期
王 潇, 杨一凡, 张 硕
(南京航空航天大学航空学院直升机动力学全国重点实验室,南京 210000)
0 引言
直升机凭借其高效的垂直起降及悬停功能,在军用和民用方面都起着十分重要的作用。旋翼是直升机的核心部件,其旋转可产生升力,但旋翼在直升机前飞过程中长期处于非对称的气动载荷下,因此引起直升机的振动问题。直升机过高的振动水平会加速机身结构的磨损,缩短电子元件的疲劳寿命,影响操纵及飞行性能,同时也导致长期处在这种环境下的机组人员眩晕、恶心及脑中枢机能下降。因此,直升机的振动控制是直升机发展过程中的一项关键技术。
针对直升机振动问题,学者们设计开发了多种直升机振动控制方法。根据有、无外部能源,直升机振动控制分为被动控制方法和主动控制方法。被动控制在20世纪末至21世纪初已经发展得较为成熟,包括吸振装置、隔振装置、阻尼器以及现代化多学科设计优化方法等(主要为旋翼和机体结构的动力学设计)。典型的无源器件(如吸振装置)可以安装在桨毂或桨叶上,以重量和阻力损失为代价减少振动;主减速器和旋翼之间的柔性隔离器可以最大限度地减少旋翼力向机身的传递。阻尼器和衰减器可以安装在机身的不同位置来达到最佳的振动控制效果。现代化多学科设计优化是另一种基于旋翼设计的被动控制方法,即使用结构优化进行细致的结构动力学设计,通过修改桨叶中质量和刚度分布来最大程度地减少直升机前飞过程中的振动[1]。
振动主动控制从20世纪80年代开始发展,到20世纪末,相应的控制技术及控制策略已经基本完善,并且逐步发展至今。主动控制目前大体可以分为基于旋翼系统的振动主动控制和基于机身结构的振动主动控制两类。前者旨在减少旋翼上的振动从而在振动传播到机身前从源头上控制振动,而后者是直接作用于机身,对机身关键位置进行振动控制。
1 直升机振动控制
直升机振动控制方法的大致分类如图1所示,被动控制已经发展得较为成熟,故重点阐述主动控制。
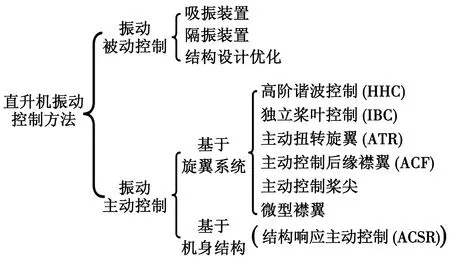
图1 直升机振动控制方法Fig.1 Helicopter vibration control method
基于旋翼系统的振动主动控制主要分为高阶谐波控制(HHC)和独立桨叶控制(IBC),其中,IBC根据作动器对象不同,可以分为作动器安装在变距小拉杆上的主动变距拉杆(APL)IBC和作动器安装在桨叶内部的桨叶作动控制(OBC)IBC。主动变距拉杆 IBC是通过驱动变距小拉杠实现的,而桨叶作动控制 IBC 则通过加入位于旋翼桨叶上的OBC装置来实现独立桨叶控制。桨叶作动控制 IBC 通过加入位于旋翼桨叶上的 OBC 装置,至今主要发展为4种形式,分别为主动扭转旋翼(ATR)、主动控制后缘襟翼(ACF)、主动控制桨尖和微型襟翼。图2给出了目前主流基于旋翼的各种振动主动控制方法,并对作动器的位置进行了标注。

图2 基于旋翼的主动控制方法Fig.2 Active control method acting on rotor
基于机身结构的振动主动控制[2]主要为结构响应主动控制(ACSR),该振动控制方法在机身中实现并且已经得到广泛的应用。
2 作用于机身的结构响应主动控制
ACSR是一种基于机身结构的振动主动控制方法,该方法由Westland[2]公司首创,其通过作动器驱动机身结构产生作动响应,来补偿旋翼振动载荷引起的激励响应,从而抑制机身的振动。ACSR方法基于模态叠加的思想,即在线性系统中,可以叠加多个独立的响应量,使总响应为零。相比于基于旋翼系统的振动主动控制方法,ACSR方法直接在机身上进行振动响应控制,机身在特定位置通过受控的强迫输入进行激励,这样,机身由于旋翼载荷和外加激励而产生的综合响应将被最小化,振动也将大幅减弱。ACSR方法把传感器布置在机身减振的关键部位,如座椅和重要机载设备等来采集机身振动响应信号,将作动器布置在机身结构上,通过控制器实时修正控制信号,输入到作动器并驱动机身结构生成合适的作动响应,从而补偿旋翼激励响应实现振动控制。直升机上常见的ACSR系统布置[3]如图3所示,图4为基于ACSR的原理框图。

图3 直升机ACSR系统Fig.3 ACSR system
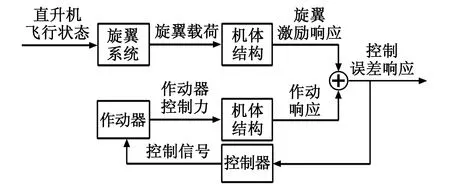
图4 ACSR原理框图Fig.4 Schematic diagram of ACSR
由于直升机振动主要来源于旋翼振动,将对作用于自动倾斜器的振动主动控制和作用于旋翼桨叶的振动主动控制进行详细讨论。
3 作用于自动倾斜器的振动主动控制
3.1 高阶谐波控制(HHC)
HHC的主要原理为:通过作动器驱动自动倾斜器,增加额外的高阶谐波总距输入,驱动桨叶桨距产生相应频率的变化,从而在桨叶上生成高阶谐波的非定常气动载荷,以减小叠加到桨毂的振动载荷。通常HHC系统将液压、电磁等作动器安装在自动倾斜器不动环的操纵杆上,驱动自动倾斜器产生(N-1)Ω、NΩ和(N+1)Ω及其谐波的变距输入,其中,Ω为旋翼转速,N为桨叶片数,其示意图[4]见图5(a)。
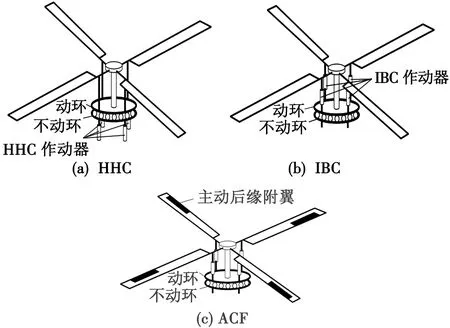
图5 HHC,IBC及ACF示意图Fig.5 Illustration diagrams of HHC,IBC and ACF
HHC可有效降低旋翼振动载荷,然而在振动控制过程中,HHC需在自动倾斜器结构上传递控制力,一旦HHC系统失效则会影响直升机的飞行操作,威胁飞行安全。此外,HHC需要产生足够大的作动力驱动桨叶变距,因此,对作动器的输出能力和控制所需的能量都有很高的要求。HHC发展早期的代表性成果有:1950年,WINSON[5]提出HHC用来提升直升机的动态性能;同年,STEWART等[6]提出了施加高阶谐波能够延缓直升机前飞状态下失速的观点;1967年,SHAW[7]发表了首篇系统讨论利用HHC进行直升机振动主动控制的论文;20世纪80年代初,文献[8-9]提出了一种将对于直升机振动主动控制十分有效的递归参数估计与线性最优控制理论相结合的自适应HHC控制策略,并对这一类算法进行了详细的讨论、分析研究;1983年,HAMMOND[10]对一种四桨叶铰接式缩比直升机旋翼模型进行了大量的风洞测试;1980~1985年,文献[11-13]等通过风洞试验、数字模拟和一架OH-6A直升机的飞行试验 (在该直升机上实施的特殊控制算法称为谨慎型(Cautious)控制器),证明这种方法在向前飞行中可以极大地降低振动水平。
图6给出了振动垂向力随着前进比变化的典型结果[14]。
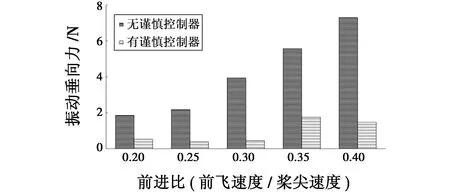
图6 振动垂向力随前进比变化Fig.6 Vibrational vertical force vs forward ratio
在测试的前进比范围内,减振效果达到了70%~90%。在一架配备HHC系统的OH-6A直升机的全尺寸飞行演示试验时,HHC系统在开环模式(手动控制)和闭环模式(计算机控制)两种模式下操作。
图7所示为以飞行员座位上的垂直加速度关于真空速的函数绘制的相关曲线[14]。飞行测试结果显示,直升机振动水平显著降低,但不会对桨叶载荷和飞机性能造成负面影响。

图7 飞行员座椅减振随空速变化图Fig.7 Variation of damping of the pilot seat with airspeed
20世纪90年代末,基于计算仿真的综合气动弹性模拟能力逐渐成熟,并用于研究HHC中的一些基本问题。分析基于前飞的挥舞-摆振-扭转耦合模型,采用时域非定常气动力和完全耦合的气动弹性响应分析。确定型(Deterministic)和谨慎型(Cautious)两种最小方差控制器算法被分别用于局部HHC模型和全局HHC模型。文献[15]中考虑的典型无铰式旋翼如图8所示。

图8 典型无铰式旋翼示意图Fig.8 Illustration diagram of typical windless rotor
利用该模型对摆振柔软无铰式旋翼HHC实现的各个方面进行了详细研究,结果表明,局部控制器和全局控制器均能有效地降低四桨叶摆振柔软无铰式旋翼的振动水平。在没有HHC输入的情况下,确定型和谨慎型两个控制器在降低4Ω桨毂振动水平方面同样成功。在瞬态飞行条件下,以15%的前飞速度阶跃变化对控制器进行研究,其性能令人满意,但局部控制器表现出比全局控制器更强的振荡行为。HHC对桨叶整体气动弹性稳定裕度影响不显著。
20世纪初,NASA阿姆斯研究中心联合多家机构进行了UH-60直升机的全尺寸旋翼风洞试验[16],结果表明,振动控制效果最显著的谐波相位和幅值组合可以使振动水平降低70%,桨涡干扰(BVI)噪声可以降低超过75%。2008年,FÜRST等[17]提出了EMA旋翼系统概念。如图9[18]所示,安装在桨毂支臂内部的作动伺服电机能够同时实现周期变距和HHC。

图9 EMA旋翼Fig.9 EMA rotor
2017年,文献[19]从降低旋翼噪声的角度分析了HHC的旋翼噪声控制机理。实验结果表明,当直升机处于典型飞行状态时,合适的HHC方案能够降低4~7 dB的BVI噪声,同时也拥有60%的振动减少效果。
HHC发展至今,文献[9-10]奠定了该项技术的基础,并且最终在休斯直升机公司的OH-6A直升机上进行了非常成功的飞行测试[11-13]。在开环和闭环控制下,整个飞行包线都表现出了出色的减振效果。
直升机HHC技术的发展大致经历了如下4个阶段:1) 建立准确的气弹动力学模型来计算高阶谐波加载后的旋翼桨毂载荷;2) 将人工智能算法与传统控制理论相结合来设计自适应控制器进行HHC;3) 振动载荷与噪声的综合研究;4) 直升机机动飞行状态的HHC研究。尽管针对HHC的研究证明了其可行性,但尚未在量产直升机上实施。尚未实现量产的原因包括:1) 成本较高;2) 一旦HHC系统失效会影响直升机的飞行操作,威胁飞行安全;3) 作动器的功率需求高,并且与铰接式旋翼桨叶相比,无铰式和无轴承旋翼上需要更高的驱动功率[15]。
3.2 主动变距拉杆独立桨叶控制
主动变距拉杆独立桨叶控制是通过变距拉杆驱动实现的,也被称为传统独立桨叶控制,即IBC。IBC的原理与HHC类似,但是作动机构布置在自动倾斜器动环的变距杆上,可独立控制单片桨叶变距,其示意图见图5(b)。
IBC不仅可实现总距和周期变距操作,还可以对每片桨叶的桨距单独进行控制,从而对每片桨叶的非定常气动载荷的频率、幅值和相位进行修正,与HHC相比具有更高的准确性。因此,基于IBC的控制技术也获得了直升机振动主动控制领域的大量关注,多项理论分析、风洞试验和飞行试验研究验证了IBC的减振效果[4,20-21]。然而与HHC类似,IBC的作动器与自动倾斜器结构相连,影响了直升机的适航性和安全性。此外,IBC的作动器布置在动环变距拉杆上,进一步提升了控制系统的复杂性。
在IBC中,每片桨叶都是单独驱动的,并且可以有独立于其他桨叶的控制命令,从而扩展了系统针对不同目标的可控性。IBC不仅涉及到每片桨叶的独立控制,还涉及到旋转参考系中每片桨叶的反馈回路,因此与HHC相比更为复杂。图10展示出了HHC和IBC的区别。
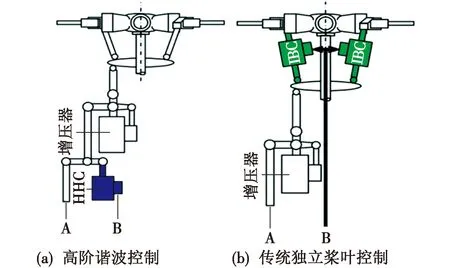
图10 HHC和主动变距拉杆IBC
图10(a)展示了HHC通过自动倾斜器不动环控制的典型实现,图10(b)展示了在自动倾斜器动环上通过液压主动变距小拉杆驱动的IBC实现。在这两种情况下,A表示的输入来自飞行操纵,B表示的输入来自主动控制系统。
IBC早期的成果有:1974~1976年,KRETZ首创IBC控制概念,MCCLOUD等在此基础上继续深入发展该概念,证明了IBC控制可以显著降低全尺寸旋翼的振动载荷[20-21];1983~1986年,HAM等[22-24]等使用试验和分析相结合的方法,探索了IBC控制的各种潜在价值,如桨叶响应、阻尼增强、失速缓解和阵风响应抑制等;1998年,文献[25]开展了用变距拉杆驱动的BO-105直升机的降噪试验,测试的目标是检查BVI噪声是否可以有效降低,结果表明在飞行测试中,IBC振幅保持在±1°不变,相位由控制器改变,可以实现最大程度的降噪,对于重度BVI噪声条件,有6 dB的降噪效果。
文献[26]全面描述了在同一架BO-105直升机上演示闭环振动控制的飞行试验。通过采用时域鲁棒抗扰控制方法显著降低了选定的4Ω振动。同一时间还在一架6叶CH-53G直升机上成功进行了闭环飞行试验[27]。在测试中,使用2Ω的IBC输入可获得3 dB的BVI降噪,同时,水平飞行中使用传统的T矩阵控制器可降低84%的振动水平。
从2001年12月开始,ZFL公司制造、安装、认证和测试了自主设计的IBC系统[28],在CH-53G试验台进行了独立桨叶控制飞行试验。试验结果表明,即使不明确优化相位和幅度,IBC也至少能将单个方向的振动减小90%以上。
HHC方法提及FÜRST等于2008年提出的EMA旋翼系统,不仅可以实现周期变距的功能,同时可以搭载高阶谐波信号,实现独立桨叶变距振动主动控制。这项具有发展前景的新概念旋翼系统已经应用于直升机CH-53,图11所示为安装在CH-53G直升机上的IBC系统[29]。

图11 CH-53G的IBC系统示意图Fig.11 IBC system of CH-53G
尽管小拉杆驱动的IBC成功进行了全尺寸风洞和飞行试验,但尚未在量产直升机上实现。主要原因是它需要复杂的液压滑环和桨毂设计,同时驱动小拉杆需要很高的功率。然而,变距拉杆驱动的无铰式旋翼控制系统可能在刚性无铰式旋翼控制系统中有潜在的应用[30]。
HHC和主动变距拉杆的IBC方法是在OBC装置出现之前开发的,因此已经达到了很高的成熟度。在很大程度上,这些是OBC的基础。因此,对这些方法的原理、演变和现状的总结对于理解OBC非常重要。
4 作用于旋翼桨叶的振动主动控制
4.1 主动扭转旋翼(ATR)
ATR是通过在桨叶上铺设智能材料,驱动桨叶扭转从而改变桨叶气动载荷,实现旋翼振动主动控制效果[31-32],其示意图见图12,其中,t表示桨叶受到小拉杆作用而受到的扭矩,θ表示桨叶产生的扭转角。
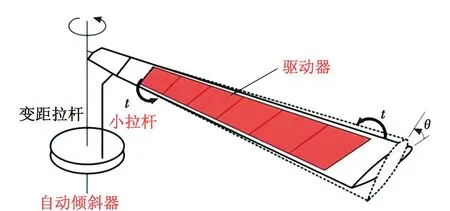
图12 ATR控制示意图Fig.12 Control diagram of ATR
相比于HHC和IBC,ATR所需功率更小,由于其控制系统不涉及自动倾斜器结构,对直升机适航性的影响也更小。然而,如何实现控制能量向旋翼系统传递是此类方法所面临的难题,同时旋转中桨叶复杂的环境也给电子控制元件的稳定性带来了挑战。
ATR的发展与智能材料和结构技术的发展密切相关,这些技术的突破始于20世纪90年代初[33]。ATR发展至今国内外有代表性的研究工作及成果有:20世纪90年代初,BARRETT[34]首次尝试通过定向放置的压电陶瓷作为作动器驱动桨叶扭转;1996年,CHEN等[35-36]建立了两种ATR桨叶模型进行对比研究,研究表明增加作动器数量并不一定会提高桨尖的扭转效率,且当压电陶瓷铺设角度为45°时可以获得最大的扭转效果,两种不同的压电陶瓷铺设方式和不同铺设角度的扭转响应如图13[36]所示,其中,图13(b)展示了作动器在不同电压下,桨尖扭转角的差别;1996年,NASA兰利研究中心、陆军研究实验室、麻省理工学院[36]为探究新主动纤维复合材料(AFC)技术的可用性,发起了ATR旋翼合作项目并设计和研制ATR旋翼,台架实验扭转效果与设计目标吻合;1997年,BENT等[37]开发出具有叉指电极的压电驱动纤维复合材料,桨叶可以被这些嵌入其中的压电纤维复合材料整体扭曲,相比较于传统的压电陶瓷材料具有更好的控制驱动能力;2000~2002年,WILBUR等[38]在兰利风洞实验室里对ATR旋翼进行了风洞试验,ATR悬停测试表明桨叶扭转响应的主要影响因素包括空气密度、转速和桨距,且悬停状态下空气密度是主要影响因素;开环前飞试验表明开环试验具有60%~90%的减振性能,主动扭转控制频率为3P时减振效果最为明显,安装了如图14[39]所示的ATR旋翼的ARES试验台;2002年,DLR、ONERA[40]联合开展主动扭转智能旋翼项目;2007年,周国庆等[41]进行了国内首次智能扭转旋翼风洞试验,结果表明在离心力场作用下,压电陶瓷智能材料驱动的碳纤维弯扭耦合梁可成功驱动桨叶,并对气动力产生明显的作用效果;2009年,张红艳等[42]采用MFC压电复合材料对旋翼模型进行了扭转控制的实验研究,结果表明,结构的扭转角随作动电压的增大呈线性增加,梁的扭转角随MFC材料各向异性系数的增大也相应增大;2017年,KALOW等[43]修订了STAR桨叶并解决了MFC的疲劳问题,桨叶不存在颤振问题且改进后的桨叶应变水平急剧降低,满足强度要求;2017年,SEKULA等[44]优化ATR桨叶参数,开发了一种先进几何外形的ATR桨叶,通过主动扭转驱动获得了75%减振效果,提高了约50%的主动扭转控制能力;2018~2021年,文献[45-47]对于既不降低桨叶扭转刚度又能实现桨叶扭转控制效率的瓶颈问题,提出了协同效应的ATR智能旋翼设计新方法,即通过优化剪裁弹性耦合和压电激励耦合的协同效应来提高旋翼桨叶的扭转控制效率;2021年,WANG等[46]通过对耦合协同效应旋转薄壁梁的研究,揭示了压电纤维激励耦合和纤维增强复合材料弹性剪裁的协同效应机理,发现了利用逆压电效应引起的横向剪切和扭转-弯曲弹性耦合的协同效应可以大幅提高主动扭转效率的现象,与现有的ATR仅把压电纤维作为作动器的设计方法不同,通过研究建立了获得协同效应及高效扭转控制效率的压电纤维铺设和纤维增强复合材料铺设的综合设计方法,相比较于已有的ATR设计,基于协同效应的ATR设计既能提高20%的扭转刚度,又能提高5%的扭转控制效率。
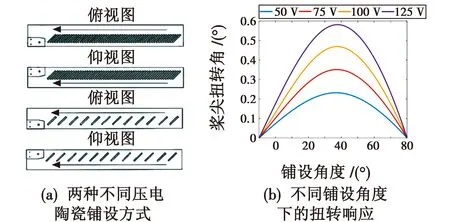
图13 压电陶瓷铺设方式及响应图Fig.13 Piezoelectric ceramic laying method and response diagram

图14 装有ATR旋翼的ARES试验台Fig.14 ARES test stand with ATR rotor
对于ATR旋翼的进一步应用,文献[48]给出了ATR旋翼工程应用的一些局限性,首先,ATR桨叶如何在恶劣的环境条件下长时间工作目前还不清楚;其次,桨叶所需的智能材料成本高,ATR在降低振动和噪声方面的系统级效益尚未得到证明。
4.2 主动控制后缘襟翼(ACF)
ACF通过控制桨叶后缘小翼改变距叶非定常气动载荷,从而降低旋翼振动载荷实现振动控制[14,49],其示意图见图5(c)[50]。
ACF通过主动控制桨叶外端后缘处的襟翼在不同方位角的有效偏转来改善直升机旋翼因气流速度不对称所产生的气动力交变载荷分布,同时降低前行侧桨叶激波和后行侧桨叶的动态失速问题。针对襟翼偏转带来的阻力增加问题,文献[51]探索了使用ACF同时进行减振和性能增强的可能。研究发现,在旋翼性能至关重要的巡航飞行速度下,ACF在产生了约50%减振效果的同时也显著降低了旋翼功率。
LEMNIOS等[52]利用卡曼式伺服襟翼进行了相关研究,通过伺服襟翼引入周期性变化的桨叶弯曲变形,旋翼在得到一定性能提升的同时,桨叶弯曲载荷振幅降低了30%。该旋翼系统也在风洞[53]中进行了测试,桨叶弯曲振幅和自动倾斜器控制负载均明显减少。
受到ATR的启发,加利福尼亚大学洛杉矶分校(UC-LA)提出了用于振动控制的主动控制后缘襟翼,其减振效果在文献[54-56]中得到了证明。FRIEDMANN等[14]通过在两种不同的桨叶模型上加装后缘襟翼,分析了ACF对桨毂4阶载荷的影响,将ACF的减振效果和HHC算法闭环控制的减振效果进行了对比,验证了基于频域的主动控制算法的ACF的有效性,证明了ACF拥有与HHC相同的减振能力。
为了分析后缘襟翼对旋翼振动、噪声以及旋翼性能等方面的影响,麦道直升机系统公司(MDHS)和NASA兰利声学部门在1992~1995年期间开展了一个联合项目[57-59]。实验结果表明,主动襟翼在降噪和振动控制方面效果显著,但需要进一步研究来确定最佳减振的谐波、振幅和相位。
MYRTLE等[60]为桨叶-襟翼组合开发了一种二维可压缩时域气动力模型,可对高达60 Hz的高频振荡下ACF产生的非定常气动力进行计算。
后续的研究[61]中,在单个伺服襟翼、单个平面襟翼和独立驱动双伺服襟翼3种不同的配置下对ACF的旋翼减振效果进行测试。结果表明,与伺服襟翼相比,普通襟翼需要更大的襟翼偏转来实现减振,双后缘襟翼系统的减振效果优于单后缘襟翼系统。
为了研究后缘襟翼对旋翼振动、噪声和旋翼性能的影响,MART智能旋翼项目开始施行[62]并在NASA风洞进行了性能测试。实验数据表明,后缘襟翼可以有效地延缓桨叶动态失速的出现,在大速度前飞状态下降低了振动载荷。
此后的一大研究重点是开发仿真计算模型,为设计和测试研究所需的ACF系统提供理论基础。现将主动控制后缘襟翼的代表性研究工作和与开发仿真计算模型相关的研究简要总结如下:1981年,SHAW等[51]探索使用ACF同时进行减振和性能增强的可能;1972年,LEMNIOS等[52]利用卡曼式伺服襟翼提升旋翼性能;1978年,MCCLOUD等[53]测试卡曼式伺服襟翼提升旋翼性能的可行性;1992~1994年,MILLOTT等[54-56]提出新的用于振动控制的主动控制后缘襟翼;1995年,FRIEDMANN等[14]在两种不同的桨叶模型上加装后缘襟翼,对比ACF和HHC算法闭环控制的减振效果;1998年,MYRTLE等[60]测试单个伺服襟翼、单个平面襟翼和独立驱动双伺服襟翼3种不同的配置下对ACF旋翼减振效果的影响;2002年,DEPAILLER等[63]对主动襟翼旋翼的气动弹性稳定性开展的研究;2003年,ROGET等[64]通过改进控制律提升主动后缘襟翼减振效果;2006年,DIETERICH等[65]设计了参数化优化桨叶的后缘襟翼,得到了使该后缘襟翼减振效果最佳的条件;2008年,GLAZ等[66]主动控制后缘襟翼降低的性能损失研究;2012年,JAIN等[67]采用CFD/CSD耦合计算方法研究桨叶扭转刚度对装有后缘襟翼的旋翼系统性能的影响;2013年,王荣等[68]对多襟翼的控制效果进行研究,结果表明多片襟翼的主动偏转能够更有效地延缓桨叶的动态失速;2017年,EUN等[69]从多体结构动力学这一新角度进行后缘襟翼的尺寸参数化设计和减振分析;2016~2018年,刘士明等[70]研究了主动后缘襟翼的旋翼气动弹性模型,建立了一种新的约束优化方法。
4.3 主动控制桨尖和微型襟翼
主动控制桨尖技术通过合理的桨尖偏转,可以削弱旋翼左右气流分布不对称性,从而延缓前行桨叶激波的产生,提高前飞速度。但这种方法改变桨叶的弦向重心位置,增加桨叶的弯扭耦合,会导致桨叶稳定性问题。图15是主动桨尖控制和主动后缘襟翼控制的作用位置比较图[39]。
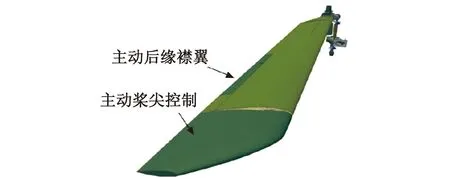
图15 主动桨尖控制和主动后缘襟翼控制作用位置示意Fig.15 Illustration diagram of active blade tip and active microflap control position
微型襟翼是由Gurney襟翼衍生而来的,它最初的设计目的是增加扰流板对赛车产生的向下力来增加赛车的稳定性。Gurney襟翼的空气动力学研究最初是由LIEBECK在风洞中进行的[71-72],研究表明,当把Gurney襟翼放置在桨叶后缘时其减振效果最显著。
文献[73-75]的研究结果证明了微型襟翼在减振、降噪和旋翼多目标控制方面的有效性,其出色的控制能力和相比于ACF的尺寸优势使其有潜力成为未来旋翼飞行器上可行的有源OBC设备。理想的微型襟翼驱动系统必须是紧凑、轻量化的,且能够以低功率要求提供高频驱动。然而,这些发展还处于初级阶段,需要更多的时间才能逐渐提高技术成熟度。
5 总结与展望
相较于传统的直升机振动被动控制技术,振动主动控制技术有更广阔的发展前景。直升机振动主动控制技术能够适应更复杂的飞行环境,且振动抑制的效果更为明显。目前智能材料等技术发展迅速,未来直升机振动主动控制技术将朝着以下几个方面发展:
1) 目前与智能材料相关尚未成熟的OBC控制会迅速发展成熟,如主动扭转旋翼和微型襟翼等;
2) 高比强度的智能材料会被应用于直升机旋翼,在提高稳定性和控制振动水平方面发挥重要作用;
3) 为健全绿色低碳循环的经济体系,响应改善民生的号召,主动控制技术会与降噪、降碳等技术多功能融合发展;
4) ACSR作为各种主动控制技术中少数成功应用于工程的技术,将会在控制算法和智能材料领域继续发展。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
测控技术(2018年11期)2018-12-07
北京航空航天大学学报(2017年8期)2017-12-20
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
北京航空航天大学学报(2016年2期)2016-12-01
科技尚品(2016年6期)2016-07-06
北京航空航天大学学报(2016年3期)2016-02-27
川北医学院学报(2015年5期)2015-12-05
浙江大学学报(工学版)(2015年8期)2015-03-01