基于项目群塔作业防碰撞方案设计★
2024-05-07 05:28宋红旗刘茂青杨海军
山西建筑 2024年9期
宋红旗,刘茂青,杨海军
(山西六建集团有限公司,山西 太原 030024)
0 引言
塔式起重机是施工现场最重要的大型起重设备之一,因其作业空间大,工作效率高,在建筑领域得到了广泛的应用[1]。近年来,随着以预制建筑为代表的建筑工业化的推进,塔机的应用场景进一步拓宽,其运行效率直接影响施工进度和工程成本,但另一方面塔机的安全运行也得到了越来越多的关注[2-4]。随着高层建筑不断涌现,生产自动化程度不断提高,大型项目多台塔机协同作业的情况也越来越常见,群塔作业的安全问题也凸显出来[5]。
互联网、大数据以及人工智能技术的进步推动了数字经济的发展。数字化是建筑产业转型升级的必然趋势。通过数字化技术,可以实现建筑业的工业化、智能化和绿色化发展,提高建筑业的附加值和竞争力[6]。数字化技术的发展与进步为保障施工过程规范性与安全性提供了新的思路与解决办法。本文针对施工过程中存在的群塔协同作业碰撞问题,提出了一种基于项目群塔作业的防碰撞方案,通过传感器和无线网络获取塔机信息构建群塔位置信息模型,实现对群塔位置和运行状态的实时掌控。其次设计了群塔防碰撞的规则和方案,在存在碰撞风险时进行及时的安全隐患提醒、塔机限速和制动。最终实现对塔机位置和状态信息的监控,并且对碰撞进行及时提醒,让塔司能够及时做出反应避免碰撞的发生。同时在碰撞即将发生时,主动进行减速和制动,减少碰撞事故的发生,保障施工作业的安全进行和现场人员的生命财产安全。
1 群塔防碰撞控制系统的设计
塔机群塔防碰撞控制系统需要对塔式起重机的运行参数及状态进行实时监控,并根据状态信息和所设计的规则,实现对碰撞风险的及时提示和对塔机的及时控制。群塔防碰撞控制系统的设计方案的整体框架如图1所示。

本文采用多传感器融合技术对塔机运行数据进行采集,为了有效避免群塔作业时塔机的碰撞,我们需要知道每个塔机三个机构的实时运行状态与塔机的相对位置。这里我们在塔机的三个运动机构处安装了传感器获取塔机的起升高度信息、变幅距离信息以及回转角度信息。
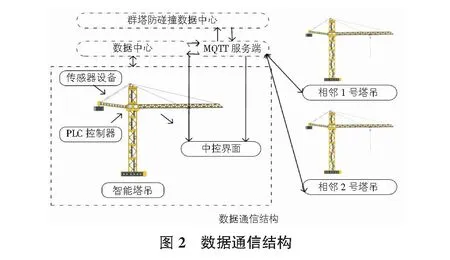
除此之外,为了获取相邻塔机的相对位置关系,我们利用了GPS技术,对塔机位置进行了定位。计算出所测量的三维位置信息,实现塔机位置的确定。进一步我们需要实现塔机间的信息交互与共享,我们引用无线通信技术,利用多个网桥构建无线组网,实现塔机之间的点对点的信息交互。整个系统的数据通信结构如图2所示。
2 群塔作业防碰撞方案设计
本节将给出项目内群塔作业防碰撞方案的设计。要实现群塔作业的防碰撞,除了技术支持外还需要有相应的规则和方案去确定何时显示安全提示信息、提示信息的形式以及执行怎样的控制动作。
群塔方案的设计首先要符合群塔作业的相关规定以及项目作业的习惯。根据《建筑塔式起重机安全规程》等相关政策的规定,处于高位起重机的最低位置的部件与低位起重机中处于最高位置部件之间的垂直距离不得小于2 m;当同一施工地点有2台以上塔机时,应保持两塔机间任何接触部位(包括吊物)距离不得小于2 m;约8成项目规定不得在交叉区域同时作业,2成项目规定可以在交叉区域同时作业,但要做好沟通。
由此可以看出群塔作业过程中,为了避免群塔碰撞已经在群塔设立阶段做了相应的规范与要求,有效避免了塔机起重臂之间的碰撞,以及起重臂与塔身之间的碰撞。因此所设计的项目群塔作业防碰撞方案的主要关注场景在于高低塔之间的碰撞,以及在碰撞多发的交叉区域如何避免群塔的碰撞。高低塔之间的碰撞场景多为低塔的起重臂刮蹭高塔的钢丝绳,且该场景一般发生在交叉区作业过程中。经过分析可知交叉区作为危险区首先需要引起塔司的充分重视,在进入交叉区域时进行安全隐患提醒。具体给出的方案如下:
当交叉区域存在多台塔机作业,即塔机的吊臂、小车同时进入碰撞区时,进行安全提示并显示在中控界面上。同时当我方塔机进入到交叉碰撞区,且检测到交叉区域存在另一台塔机时,此时会对群防状态及塔机速度进行限制;安全提示规则如表1所示。
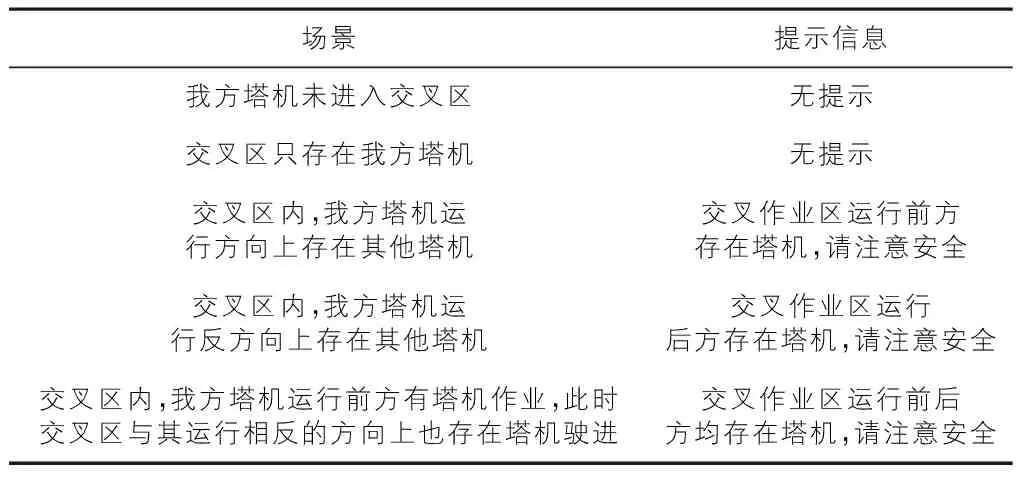
表1 安全提示规则汇总表
具体的控制规则如下:
获取塔机的运行信息,检测到交叉区内我方塔机靠近方向距离D1内存在塔机,设定警戒距离范围为S1,危险距离范围为S2。其中S2为塔机最高速度下能停止的最短距离,S1>S2。假定我方塔机为高塔,接近塔机为低塔,那么我方塔机距离相邻塔机的距离D1的定义为低塔大臂距离高塔钢丝绳之间的距离。其示意图如图3所示。

我们假定高塔的塔机坐标为(xa,ya,za),低塔的塔机坐标为(xb,yb,zb),高塔和低塔的状态为(la,θa,ha)和(lb,θb,hb)。其中所应用到的符号如表2所示。
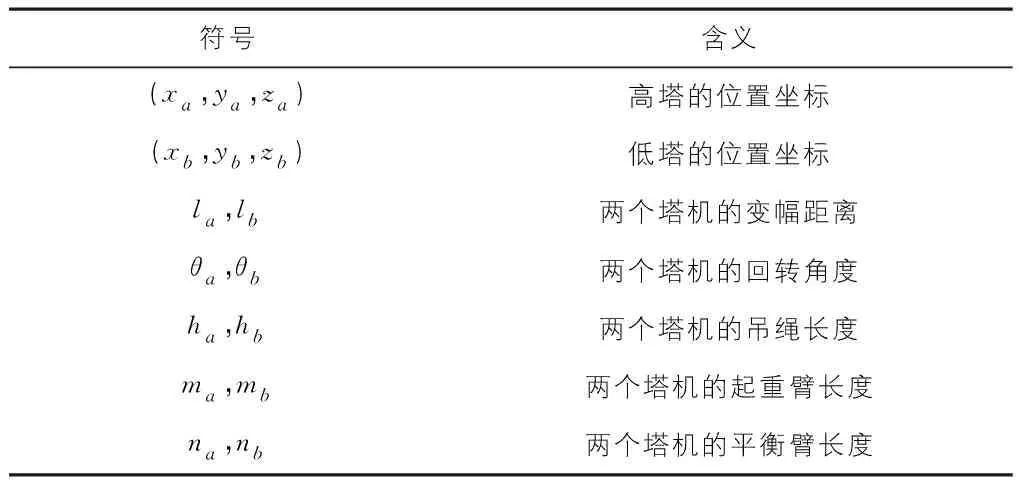
表2 符号表
那么我们可以获得高塔吊绳两端的坐标可以表示为式(1)所示的形式。
(1)
低塔塔臂两端的位置坐标可以表示为式(2)所示的形式。
(2)
根据吊绳和大臂的坐标信息结合线段之间的距离计算公式我们很容易得到低塔大臂距离高塔钢丝绳之间的距离D1。
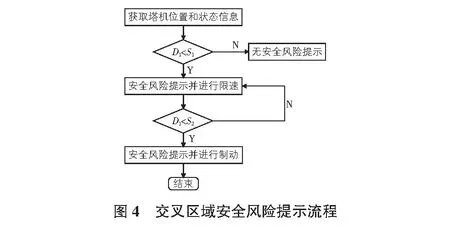
结合之前的分析我们可以得到整个控制的流程如图4所示,首先我们需要根据所采集到的塔机位置信息和运行状态信息获取高低塔情况下低塔塔臂距离高塔钢丝绳之间的距离D1,如果所得到的距离小于警戒距离S1说明当前塔机没有碰撞风险,若大于警戒距离则需要进行安全风险提示,提醒塔司需要注意附近的作业塔机,并对塔机的回转、变幅等操作的档位进行限制;若所得到的距离小于S2则需要对塔机进行制动,保证塔机不会发生碰撞,造成安全事故。同时当碰撞风险解除时应当恢复塔机的驾驶。
3 实验方案设计与验证
基于以上的分析和设计我们得到了关于项目内群塔作业防碰撞技术方案和安全风险提示与控制规则,本节我们将通过现场实验和应用的方式验证所提出方案的有效性。
首先我们需要验证所给出的技术方案和安全风险提示与控制规则所涉及的场景能够在实际的应用中生效,因此我们设计了相应的验证实验方案。验证实验的场地为山西六建阳曲县人民医院新院区建设项目,该项目包含4台同时作业的塔吊,其位置关系如图5所示。从图5中可得到4台塔吊相互之间均存在交叉作业区,我们将2号塔机作为实验塔机,部署项目内群塔作业防碰撞监测与控制系统,以1号作为验证的低塔,模拟1号塔位于交叉区域,2号塔机从不同方向接近交叉区塔机、2号塔位于交叉区域,1号塔机从不同方向接近交叉区塔机及两塔机同时进入交叉区域或同时在交叉区域作业三种实验场景,分别验证模拟场景下塔机的报警显示是否正常、塔机减速制动情况及风险消失,塔机恢复驾驶情况。

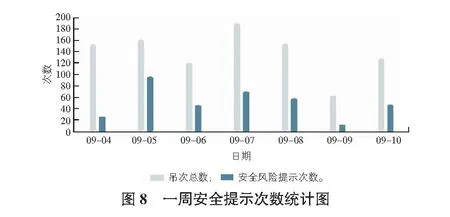
设置S1=20 m,S2=15 m,根据以上方案进行测试,结果如图6,图7所示。图6距离D1=17.283 5 m且2号塔机的小车和1号塔机的大臂均在交叉区内。此时满足条件S2 为了验证所给出方案的应用可行性,我们将采集到的塔机运行数据以及安全提示信息,上传到了项目管理平台上,那么我们可以通过后台数据更直观地看到防碰撞安全风险提示信息和控制生效的次数以及发生的吊次。这不仅有利于监控防碰撞系统的运行情况,还可以在事故发生时第一时间定位事故发生原因及时做出调整。如图8所示为9月4日至9月10日一周的吊次数据与安全提示信息数据统计。 由以上数据可知,在群塔作业过程中,一周内的安全风险提示次数占总吊次的37%,单独一天的安全风险提示的最高次数达到了吊物总次数的60%。根据实际数据我们可以更直观地了解群塔运行风险,并做到及时的安全风险提示和控制。从而帮助塔司更快地规避群塔碰撞风险,保障群塔作业的安全。 由于吊装中时常发生群塔作业的场景,本文提出了基于群塔作业防碰撞方案并开发了群塔防碰撞系统,通过采集和共享塔机的运行信息,设计群塔防碰撞规则,实现了塔机在发生碰撞风险时的及时提示、减速和主动制动。通过在实际项目上运行的结果,可看出群塔防碰撞方案规避群塔碰撞场景的有效性。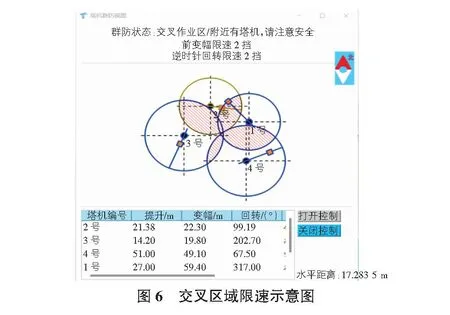
4 结语
猜你喜欢
科学与财富(2021年33期)2021-05-10
阅读(高年级)(2020年4期)2020-06-21
初中生世界·八年级(2019年6期)2019-08-13
测控技术(2018年5期)2018-12-09
中国特种设备安全(2018年12期)2018-03-15
中国农资(2016年1期)2016-12-01
小学生导刊(低年级)(2016年6期)2016-07-02
计算机工程(2015年8期)2015-07-03
建筑机械化(2015年7期)2015-01-03
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10