
一种蜂窝板装配机械手用新型柔性夹具研制
2024-05-07 09:12邓三星杨蒙蒙安红恩李克强
机床与液压 2024年6期
邓三星,杨蒙蒙,安红恩,李克强
(黄河交通学院机电工程学院,河南焦作 454900)
0 前言
蜂窝板的结构多样性和种类多样性导致它在自动化搬运过程中具有较大的挑战性。大多数结构板对蜂窝单元的尺寸和形状均十分敏感[1]。1 mm左右的蜂窝单元尺寸误差就会导致整体面板的长度和宽度出现高达50 mm的误差。蜂窝单元的力学性能对方向的依赖性较高[2],并且极容易弯曲变形[3]。因此,一个完整的蜂窝结构对成品的性能至关重要。
为了提高自动化程度,通常需要为蜂窝板机械手装备一个夹具,要求具备一定的灵活性来夹持各种蜂窝板,并具有不损坏材料的灵敏度。然而,基于形闭合与力闭合概念的经典机械夹具不适用于蜂窝板,因为仅从外部夹持会导致变形[4]。此外,由于材料的物理性质和结构,可以排除其他广泛使用的夹具,例如真空夹具、磁力夹具或静电夹具[5]。由于存在被污染的风险,非常适合处理非刚性片材的黏附式夹具也不能用于蜂窝板[6]。ASHAB等[7]提出了一种基于摩擦的夹具概念,试图通过将刚性夹持元件插入蜂窝单元来实现夹持。这种夹具需要使单元壁变形,从而导致几何形状出现偏差。SHINTAKE等[8]提出将柔性夹具应用于蜂窝板,通过摩擦实现了外部夹持。然而,由于尺寸大、刚度低等问题,只有内部夹持才是可行的方案。RUBIO-MATEOS等[9]提出了一种基于可变尺寸橡胶体的内部柔性夹具,橡胶体附着在一个插入物体腔内的夹持销上,但是,这种内部柔性夹具的夹持销过大,无法插入较小的蜂窝单元中。
本文作者研制一种装配机械手用新型柔性夹具,可用于不同的材料、蜂窝尺寸、密度的蜂窝板自动搬运工作。首先,对夹持器的要求进行了详细的分析。在此基础上,提出一种基于柔性环的新型柔性夹具概念。之后,进一步优化基本概念,以提高灵活性。制备并测试原型以确定适用于各种蜂窝板的最佳夹持参数,并量化夹持力和验证该概念。
1 蜂窝板柔性夹具设计
1.1 问题与要求分析
蜂窝板夹具需要满足一些通用要求。例如:夹紧力应足够大,以夹紧单元数量合理的蜂窝板;夹具应能夹持不同的材料、蜂窝尺寸、密度的蜂窝板。由于蜂窝板的种类太多,文中所考虑的范围仅限于一些最常见的材料和蜂窝配置。最常见的基材是芳纶、铝和牛皮纸[10]。芳纶和铝在航空航天工业中最常见,而牛皮纸则用于包装、家具或汽车中。最常见的蜂窝单元配置如图1所示。

图1 蜂窝单元的几何形状
对于质量和强度要求很高的领域,例如航空航天中,蜂窝单元主要使用六角形。对于低成本的需求,大多使用牛皮纸制成的波纹状蜂窝。此外,夹持元件以及整体机械结构应尽量简单,以限制成本和提高可靠性。
1.2 基本概念设计
与现有蜂窝板夹具的概念一样,文中所提柔性夹具概念也是基于安装在底板上的多个夹持元件。夹持元件由柔性线绳制成,可弯曲形成一个个环。为了夹紧,夹具被压在蜂窝板上。扁平环状物的二维形状导致环状物围绕一个长轴的面积惯性矩比另一个轴低得多。因此,软环可以很容易地偏转并垂直于环平面,从而滑入蜂窝单元而不造成损伤。同时,环平面内环的压缩会导致足够的预紧力[11],以通过摩擦力固定住蜂窝结构,如图2所示。
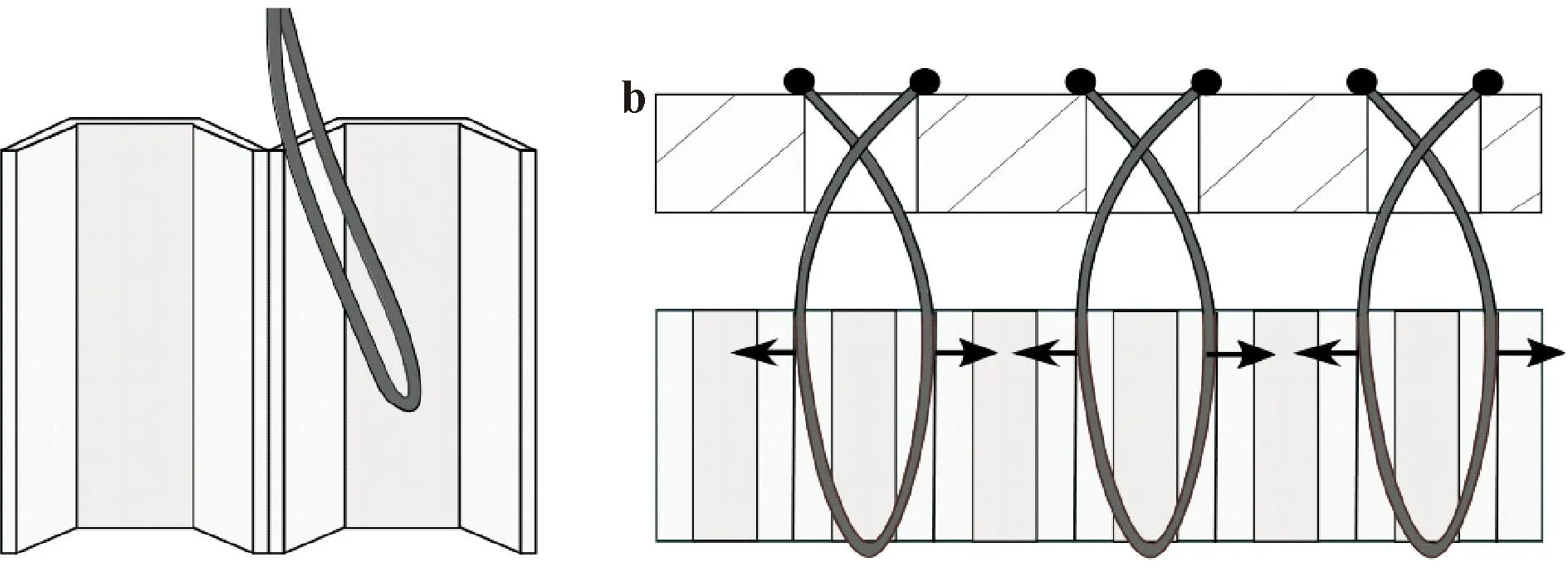
图2 基于线绳环的柔性夹具概念
上述线绳环的概念可以适应各种几何形状的蜂窝单元。夹持过程本身是被动产生的。多个夹具可以结合在一个夹持系统中,以尽量减少处理过程中蜂窝的偏移。
2 具有可调环的柔性夹具研制
2.1 环几何形状的要求分析
为了研制具有可调环的柔性夹具,分析对环几何形状的要求。线绳环需要经历2种状态,分别称为预插入状态和插入状态。这2种状态对环的长度和宽度有不同的要求。在预插入状态下,环要求很窄,以便容易地滑入小细胞。初步测试表明,长环可能会折叠,从而损坏材料。因此,在预插入状态下,短环是更有利的。插入状态下的环需要满足一定的硬度和宽度,因为夹具的夹持力取决于环的刚度,且环的宽度需要适应蜂窝单元的尺寸[12]。
因此,基于静态几何形状环的柔性夹具无法满足高灵活性的需求,需要合理控制环的长度。此外,环的最宽点需要在夹具板的下方。如果不满足这一要求,蜂窝单元壁和线绳之间会产生对角力,抵消夹持力,如图3所示。
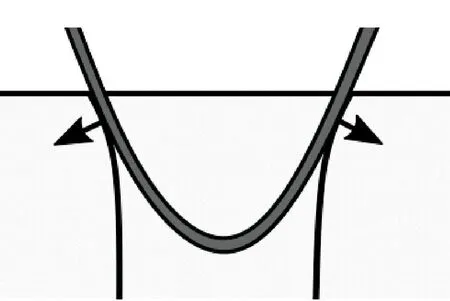
图3 对角力与夹持力之间的抵消
2.2 环的控制方法设计
为了控制环的几何形状,文中设计了3种基本方法,如图4所示。

图4 控制环几何形状的方法
为了选择最佳的方法,对这3种环的控制方法进行了评估,结果如表1所示。

表1 3种环的控制方法的评估
由表1可以看出:只有控制线绳长度来改变环几何形状的方法,可以满足所有4个要求,所以文中采用此控制方法。
2.3 环控制的具体实现
为了具体实现上述改变环的控制方法,设计了3种技术原理,如图5所示。
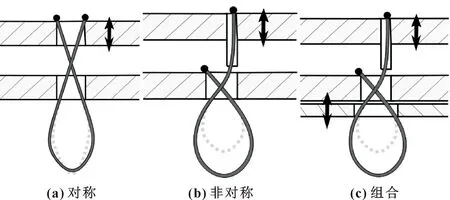
图5 改变环的3种技术原理
为了验证所提环控制方法并选择更合适的技术原理,使用直径为0.7 mm的聚酰胺[13]绳分别构建了3个简单的夹具原型。在蜂窝单元尺寸为3.2 mm和4.8 mm的芳纶蜂窝板上分别测试了3种夹具原型。结果表明:不同夹具之间存在重大差异,这主要是由聚酰胺的黏弹性引起的[14]。在前2种原型中,聚酰胺绳在预插入状态时在环的尖端发生塑性变形。第一个原型中,在插入状态下,多次夹持循环后,环变得更窄,夹持力减小。第二个原型中,环的形状在预插入状态下变得更圆,实现了环的无损伤插入。
第三个原型是前2种原型的组合,在第二个原型的基础上增加了一个移动板,该移动板可在夹持后恢复环的原始形状。测试结果表明:该原型可抵消变形的影响,因此被选为最终原型。由于移动板的运动只需要在行程结束时进行,因此可以被动地驱动该板,从而不影响简单的机械结构。柔性夹具原型的结构如图6所示。
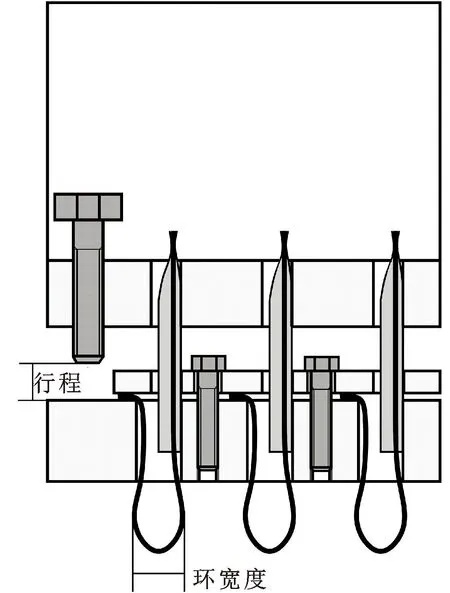
图6 柔性夹具原型的结构
3 夹持参数及夹持力的实验分析
3.1 柔性夹具原型的制备
为了验证所提概念,使用聚酰胺绳构建了一个柔性夹具原型。为了保持原型的简单性,将环恢复为原始形状的操作是由人工完成的。夹具原型如图7所示。
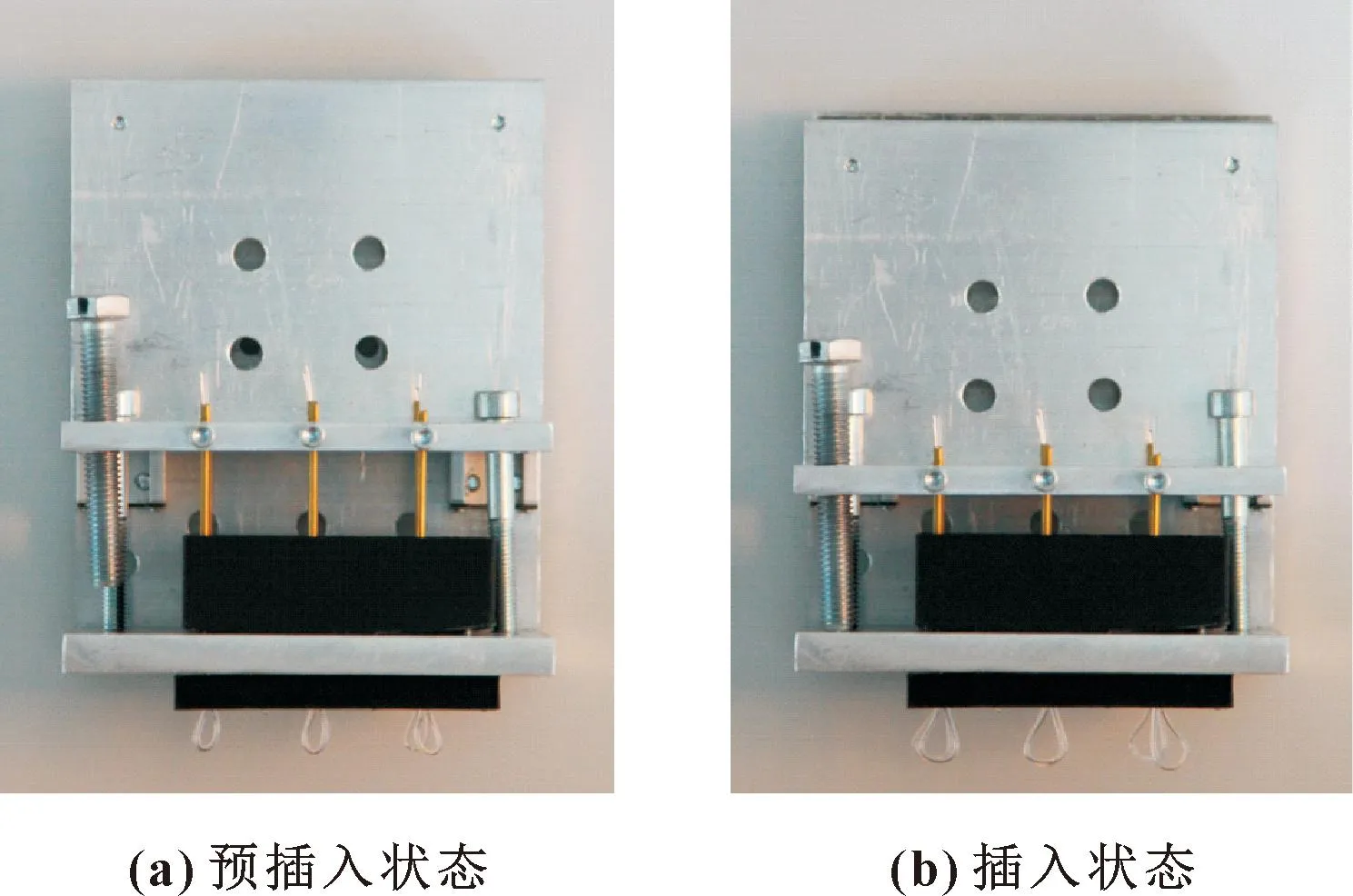
图7 夹具原型
该柔性夹具由6个环组成,环的两端固定在两块板上,由线性轴承引导。预插入状态下环的宽度以及行程(决定插入状态下环的宽度)都由可调止动器设置。管子和导向块防止绳弯曲。安装在装配机器手上的夹具原型如图8所示。

图8 安装在装配机器手上的夹具原型
3.2 实验设置
为了验证原型并找到不同材料的最佳夹持参数,对多种常见蜂窝板的夹持力和夹持参数之间的相关性进行实验分析。夹持参数为:线绳的直径、预插入和插入状态下的线绳长度。线绳的长度取决于行程,并由制动器调节,线绳的直径控制线绳的硬度。用于测量夹持力的测试装置如图9所示。

图9 测试装置
该装置包括2个工作台,由安装在框架上的线性轴承引导。第一个工作台放置蜂窝板,并与HBM公司的力传感器S2M连接,其量程为0~100 N。每种测试蜂窝板的示例如图10所示。

图10 测试的蜂窝材料示例
第二个工作台上固定了夹具,并与一个杠杆相连以施加力,采用HBM的Quantum X和CatmanEasy软件[15]进行评估。所有测试蜂窝板的参数如表2所示。

表2 所有测试蜂窝板的参数
以直径为0.3、0.7、1、1.3 mm的聚酰胺绳为研究对象,初步测试结果表明:0.3 mm绳不够坚硬,无法施加明显的夹持力,而1.3 mm绳可实现的最小环宽明显大于蜂窝单元尺寸。因此,最终选择直径为0.7 mm和1 mm的绳用于测试。
由行程控制的绳长度会同时改变环的长度和宽度,但只有宽度才会增加夹持力。因此,对于2个绳直径,以1.25 mm的步长测量环宽度作为行程的函数。
在初步测试中,确定了预插入状态下的绳长度,以实现最佳的环插入特性。对于0.7 mm的绳,插入时的最佳绳长度为3.5 mm;对于1 mm的绳长,最佳绳长度则为4.2 mm。
插入状态下的绳长度是通过逐步增加行程来改变的(1.25~12.5 mm)。对于每组参数,在不同材料类型的蜂窝板上测量5次夹持力。
3.3 实验结果
环路的宽度最初几乎是线性增长的,随后达到了一个平稳期。因此,最大夹持力不会出现在最大行程以外,即最佳行程小于最大行程。测量环宽度的结果如图11所示。
不同于芳纶和纸质材料,铝蜂窝板在测试过程中几乎不可能受到夹具的损伤,因此后续最佳夹持参数实验仅分析了芳纶和纸材料。2种材料的平均夹持力如图12所示。

图12 平均抓取力曲线
对于0.7 mm绳和1 mm绳,夹持力都先增加到最大,然后又减小,证实了上述关于环尺寸与行程的假设。最大夹持力出现的位置不同,此现象与蜂窝材料有关。其中,在过度膨胀芳纶(芳纶4)蜂窝板与0.7 mm绳的组合下,夹持力不断上升,这表明过度膨胀的蜂窝单元具有很高的弹性,最大的力出现在测试行程以上。0.7 mm的绳不会损坏任何蜂窝,1 mm的绳中芳纶1、2会出现损伤现象,而芳纶3、4以及波纹纸材料都没有损坏。每种材料的最佳行程如表3所示。

表3 测试蜂窝板的最佳行程
整体来看,1 mm绳相比0.7 mm绳的夹持力更高。然而,由于1 mm绳在插入过程中损坏了一些蜂窝,因此该绳仅适用于蜂窝单元相对较大或强度较高的蜂窝板,例如芳纶3。0.7 mm绳不会损坏任何材料,具有更高的灵活性。
对于具有相同单元尺寸和不同密度的蜂窝板,最大抓取力发生在不同的行程。因此,最佳的环尺寸不能仅从蜂窝单元的尺寸得出,必须考虑材料密度。由图12可以看出:所有测量值的标准差都比较大。原因是夹具原型的环数较少,可能导致夹持力的高散射。而夹持力很大程度上取决于单元中每个环的确切位置。
结果表明:所研制的可调节环尺寸的柔性夹具满足了灵活性和灵敏度的要求,可夹持蜂窝板范围较广,大幅提高了自动化制造效率。此外,确定了最佳的夹持参数,可为特定的材料范围设计单独的夹具。
4 结语
文中提出了一种用于蜂窝板自动搬运的新型柔性夹具。为了满足灵活性要求,在静态几何形状环的柔性夹具基础上,对环路几何结构进行了合理控制,选择不同的绳长度来控制环的几何形状。对各种常见蜂窝板的夹持力和夹持参数之间的相关性进行了测量。结果表明:该夹具在不造成损坏的条件下,满足了夹持常见蜂窝板所需的灵活性和灵敏度要求。在未来的工作中,将评估具有小弯曲直径和大线性弹性范围的其他绳材,以消除夹持后恢复环形的过程。
猜你喜欢
数学大王·低年级(2023年3期)2023-03-12
现代装饰(2021年1期)2021-03-29
孩子·小学版(2020年4期)2020-01-25
四川冶金(2019年5期)2019-12-23
知识就是力量(2018年3期)2018-03-08
纺织科学研究(2017年2期)2017-05-17
纺织科学研究(2017年1期)2017-05-17
环境科技(2015年3期)2015-11-08
橡胶工业(2015年2期)2015-07-29
应用化工(2014年11期)2014-08-16
