面向战机大迎角机动过程的智能学习控制
2024-04-30 08:07于目航
自动化学报 2024年4期
于目航 王 霞 杨 林,3 许 斌
战机在空战中近距格斗不可避免,大迎角下精准且快速的机头指向能力是空战胜败的关键因素[1].当战机进行大迎角机动时,机体附近的气流从附着流变为不稳定的分裂流,使得气动力和气动力矩表现出强烈的非线性,同时导致气动操纵面舵效降低和通道间产生强耦合性[2].推力矢量发动机能够直接改变飞行器的推力大小和推力方向,是发挥现代飞行器高机动性能的重要技术.因此,设计推力矢量战机大迎角机动协同控制方法,对增强其战斗能力和生存能力具有重要意义.如何设计控制方法克服飞机大迎角机动时的强非线性和强耦合性,并合理分配到气动舵面和推力矢量上,是飞机大迎角机动控制的核心问题.
围绕大迎角的机动控制问题,发展出了多种有效的控制方法.利用小扰动线性化模型,增益调度[3]、多平衡点自适应切换[4]和鲁棒控制[5]等经典控制方法得以应用,然而基于线性模型的控制方法难以覆盖大迎角机动飞行包线.针对大迎角飞行导致的强非线性,广义逆方法[6]利用非线性模型信息实现控制解耦,通过反馈线性化的方式设计逆控制器,并可与容错控制[7]、模糊控制[8]和自适应动态规划[9]等方法结合.广义逆方法克服了线性控制器的局限性,但依赖于精确的模型信息,难以应对战机大迎角机动时表现的强非线性与模型不确定.
针对战机在大迎角状态下动力学不确定的处理方法大致可分为三种: 第一种方法是设计鲁棒控制策略抵抗不确定的影响,文献[10]利用滑模控制的鲁棒和抗扰性能,设计了战机大迎角机动和侧滑角抗扰控制律.文献[11]针对输入受限下飞行器力矩计算的不确定性,设计了神经网络滑模姿态跟踪控制律,有效减少了系统颤振.第二种方法是设计状态观测器对模型不确定进行估计,文献[12]基于自抗扰控制方法,利用扩张状态观测器对模型不确定性进行估计和补偿,并实现了气动舵面和推力矢量的协同控制.文献[13]考虑过失速机动时输入饱和的影响,设计了非线性有限时间观测器实现对飞行器模型中非稳态气动扰动的实时估计,提高了姿态控制的精度.文献[14]考虑风扰动对飞行器动力学的干扰,设计了基于扰动观测器的自适应控制器,实现了对未知扰动和不确定的有效估计.第三种方法是通过智能方法对模型不确定进行在线估计和补偿.基于反步法的控制框架,将状态变量作为虚拟控制递归设计控制器,便于精细处理级联子系统的不确定[15],同时具有与其他方法整合灵活[16-17]的特点.文献[18]将未知气动函数转化为线性参数化的形式,设计自适应更新律对未知气动参数进行估计.文献[19-20]针对战机建模误差和外部干扰等模型不确定,提出了基于反步法的鲁棒自适应控制方案,保证了闭环系统的全局稳定.文献[21-22]基于神经网络智能学习方法,对反步框架下的级联子系统不确定进行估计,有效提升了系统非线性学习性能和控制精度.文献[23]进一步构建离线有限时间复合学习律存储训练数据,有效减少了计算负荷.
基于以上分析,战机大迎角模型呈现大范围非线性、气动不确定及强耦合特性,要求飞控系统消除非线性影响,使控制系统具备较好的操稳特性.大迎角机动时飞机没有典型配平状态,已有平衡点小扰动线性化和传统增益预置控制失效,而自抗扰等非线性控制方法利用鲁棒观测处理集总未知,仅面向闭环稳定,难以实现集总干扰的精细估计与补偿.本文通过将通道耦合作用和模型强非线性视为集总扰动,将动力学模型解耦为迎角、侧滑角和滚转角速率子系统.通过平行估计系统构建表征干扰不确定学习性能的预测误差信号,设计复合学习更新律对集总未知进行有效估计和补偿,并基于估计信息设计智能自适应控制律.最后基于串接链控制分配方案,实现气动舵面与推力矢量的协同控制.仿真测试表明所提方法能够实现大迎角机动指令的有效跟踪,且跟踪精度更高、学习性能更好.
1 问题描述
1.1 六自由度非线性模型
考虑战机动力学模型[12]为
该模型状态量为x=[α,β,p,q,r]T,α和β分别表示迎角和侧滑角,p,q和r分别表示滚转角速率、俯仰角速率和偏航角速率.控制输入为u=[δe,δa,δr,δx,δy,δz]T,δe,δa和δr分别表示升降舵、副翼和方向舵偏角,δx,δy和δz分别表示滚转、偏航和俯仰方向的推力矢量喷管偏角.V,γ,χ和µ分别表示速度、航迹倾斜角、航迹方位角和航迹滚转角,Tx,Ty和Tz分别表示推力矢量产生的力在机体轴的分量,lT,mT和nT分别表示推力矢量产生的三轴力矩,m表示战机质量,g表示重力加速度,Iij(i=x,y,z,j=x,y,z) 表示惯性矩.D,Y和L分别表示阻力、侧力和升力,la,ma和na分别表示滚转力矩、俯仰力矩和偏航气动力矩,表达式分别为
其中,
注 1.战机动力学模型存在较强的耦合特性,在俯仰、滚转和偏航三通道的表达式中包含另外两个通道中的状态,同时三通道气动参数均为各通道变量、升降舵、副翼和方向舵的非线性函数.
1.2 推力矢量发动机模型
飞机尾部对称安装的两台推力矢量发动机提供额外的控制力矩.定义推矢喷管的上下偏转角为δzi(i=l,f),其中l和f分别表示左右推矢喷管,向下偏转为正.定义推矢喷管的左右偏转角为δyi(i=l,f),向左偏转为正.两台发动机的上下偏转提供俯仰力矩,俯仰通道的推矢偏角为δz=(δzl+δzf)/2.两台发动机的左右偏转提供偏航力矩,偏航通道的推矢偏角为δy=(δyl+δyf)/2.两台发动机差动偏转提供飞机的滚转力矩,滚转通道的推矢偏角为δx=(-δzl+δzf)/2.
假设两台发动机的推力大小和左右偏转角均相等,即δyl=δyf=δy.在喷管偏角小于 2 0◦的限制下,推力矢量产生的推力在机体系三轴的分量为
式中,T表示发动机推力,ζf表示推力系数.
令xT,yT和zT表示推力在机体系三轴上作用点的位置,则推力矢量产生的推力力矩为
1.3 动力学模型变换
根据式(1)和(4),可得迎角子系统
式中,b0α表示俯仰控制系数,v1表示俯仰操纵力矩,fα和fq表达式分别为
根据式(2)和(5),可得侧滑角子系统
式中,b0β表示偏航控制系数,v2表示偏航操纵力矩,fr表达式为
根据式(3),可得滚转角速率子系统
式中,b0p表示滚转控制系数,v3表示滚转操纵力矩,fp表达式为
引理 1.对于紧子集 Ω∈R上的未知平滑非线性函数,采用径向基神经网络[21]进行估计,可得
式中,ξ ∈Ω 表示输入向量;W ∈Rl表示最优权重向量,l>1;ε表示神经网络的逼近误差,满足‖ε‖≤εM,其中εM >0 表示逼近误差上界;ϑ(ξ)=[ϑ1(ξ),ϑ2(ξ),···,ϑl(ξ)]T表示基函数向量,一般选择高斯函数作为径向基函数,表达式为
式中,j=1, 2,···,l;ϱj=[ϱj1,ϱj2,···,ϱjD]T表示吸引域中心,D >1 ;σ¯j表示高斯函数的标准差.
1.4 控制目标
考虑解耦后的迎角子系统(8)、侧滑角子系统(9)和滚转角速率子系统(10),本文的控制目标是设计基于复合学习的智能自适应控制方法获取期望操纵力矩,在此基础上设计串接链分配方法获取气动舵面和推力矢量偏角,实现大迎角机动指令的有效跟踪.
2 控制器设计
针对解耦后的子系统,采用神经网络估计未知气动函数,构建预测误差对学习性能进行评价,结合气动估计信息对模型非线性进行补偿,设计自适应控制器获取期望控制力矩,保证机动指令的有效跟踪.以迎角子系统为例,控制结构如图1 所示.
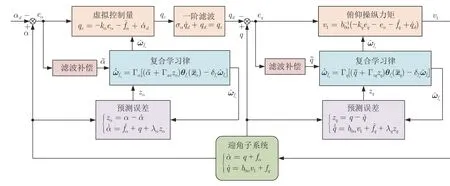
图1 迎角子系统控制框图Fig.1 Angle of attack control diagram
2.1 迎角子系统设计
步骤 1.考虑迎角动力学,采用神经网络逼近未知气动函数fα,可得
定义迎角跟踪误差eα=α-αd,αd表示迎角指令.设计俯仰角速率虚拟控制量为
引入一阶滤波器为
式中,σα表示滤波参数,qd表示qc经过一阶滤波器后获得的信号.
定义俯仰角速率跟踪误差eq=q-qd.迎角跟踪误差的导数为
设计滤波补偿信号为
式中,补偿信号cq在下一步给出.
定义补偿后的迎角跟踪误差为
定义预测误差为
式中,λα表示设计参数.
设计复合学习更新律为
式中,Γα,Γzα和δfα表示设计参数.
步骤 2.考虑俯仰角速率动力学,采用神经网络逼近未知气动函数fq,可得
设计俯仰操纵力矩为
俯仰角速率跟踪误差的导数为
设计滤波补偿信号为
定义补偿后的俯仰角速率跟踪误差为
定义预测误差为
式中,λq表示设计参数.
设计复合学习更新律为
式中,Γq,Γzq和δfq表示设计参数.
2.2 侧滑角子系统设计
步骤 1.考虑侧滑角动力学,定义侧滑角跟踪误差eβ=β-βd,βd表示侧滑角参考指令.设计rxc为
式中,kβ表示控制参数.
引入一阶滤波器为
式中,σr表示滤波参数,rxd为rxc经过一阶滤波器后获得的信号.
定义偏航角速率跟踪误差为er=rx-rxd.侧滑角跟踪误差的导数为
设计滤波补偿信号为
式中,补偿信号cr在下一步给出.
定义补偿后的侧滑角跟踪误差为
步骤 2.考虑偏航角速率动力学,采用神经网络逼近未知气动函数fr,可得
设计偏航操纵力矩为
偏航角速率跟踪误差的导数为
设计滤波补偿信号为
定义补偿后的偏航角速率跟踪误差为
定义预测误差为
式中,λr表示设计参数.
设计复合学习更新律为
式中,Γr,Γzr和δfr表示设计参数.
2.3 滚转角速率子系统控制
考虑滚转角速率动力学,采用神经网络逼近未知气动函数fp,可得
定义滚转角速率跟踪误差ep=p-pd,pd表示滚转角速率指令.设计滚转操纵力矩为
滚转角速率跟踪误差的导数为
式中,λp表示设计参数.
设计复合学习更新律为
式中,Γp,Γzp和δfp表示设计参数.
2.4 控制分配
控制分配问题可以描述为: 对于给定的虚拟控制量与控制输入,存在映射关系G(x):R6→R3,在控制输入满足期望指标的约束下求解不定方程
式中,v=[v1,v2,v3]T∈R3表示期望操纵力矩,u ∈R6表示控制输入,G(x)=[Gaero Gtv] 表示控制能效矩阵,表达式为
式中,(x) 表示在状态x下操纵面δj(j=e,a,r,x,y,z)对应通道的操纵力矩导数.
控制输入约束为
式中,umin和umax表示舵面偏转幅度限制,Γmin和Γmax表示舵面偏转的速度限制.
定义uaero=[δe,δa,δr]T和utv=[δx,δy,δz]T,气动舵面和推力矢量对应的操纵导数矩阵分别为Gaero和Gtv,其广义逆矩阵分别为.串接链分配方法在分配过程中优先使用气动舵面,即优先满足
对式(49)求解得
若uaero均在位置和速率限制内,则分配完成;若达到气动舵面饱和,推力矢量喷管发生偏转来补偿剩余分配力矩,推力矢量偏角表达式为
式中,E=v-Gaerosat(uaero) 表示待补偿的控制力矩,s at(·) 为饱和函数.
3 稳定性分析
3.1 迎角子系统稳定性
定理 1.考虑迎角子系统(8),设计俯仰操纵力矩(22),复合学习更新律(20)和(27),则李雅普诺夫函数(52)中的误差信号是一致终值有界的.
证明.选择李雅普诺夫函数Vα为
的放缩与类似,进一步可得
3.2 侧滑角子系统稳定性
定理 2.考虑侧滑角子系统(9),设计偏航操纵力矩(34),自适应复合学习更新律(39),则李雅普诺夫函数(61)中的误差信号,,zr和是一致终值有界的.
证明.选择李雅普诺夫函数Vβ为
对Vβ求导可得
的放缩与类似,进一步可得
式中,ϖβ=min{2kβ, 2kr-1, 2λr-1,δfrΓr},进一步可得
3.3 滚转角速率子系统稳定性
定理 3.考虑滚转角速率子系统(10),设计滚转操纵力矩(41),复合学习更新律(44),则李雅普诺夫函数(66)中的误差信号ep,zp和一致终值有界.
证明.选择李雅普诺夫函数Vp为
对Vp求导可得
的放缩与类似,进一步可得
由此可证,ep,zp和是一致终值有界的.
注 2.根据李雅普诺夫稳定性定理,需选择控制增益ki(i=α,q,β,r,p) 和自适应参数λk,δfk, Γk,Γzk(k=α,q,r,p),使得ϖα >0,ϖβ >0,ϖp >0.在实际参数整定中,首先调整参数ki和λk使系统满足基本控制性能,之后调整参数δfk, Γk和 Γzk提高系统的跟踪精度和不确定学习效果.
4 仿真分析
设定飞机的初始迎角为10°,飞行高度1 200 m,初始飞行速度90 m/s,飞行过程中保持恒定发动机推力90 kN.仿真步长和仿真周期分别设置为ts=0.001 s 和T=16 s.对于迎角子系统,控制器参数设置为b0α=1,kα=15,kq=15,λα=5,λq=1,σα=0.005,Γα=0.2,Γzα=3,δfα=0.3,Γq=0.2,Γzq=0.1和δfq=0.3.对于侧滑角子系统,控制器参数设置为b0β=-10,kβ=0.1,kr=0.6,λr=1.4,σr=0.005,Γr=2.6,Γzr=1 和δfp=1.对于滚转角速率子系统,控制器参数设置为b0p=10,kp=5 000,λp=5,Γp=2,Γzp=1 和δfp=3.针对未知函数fα,fq,fr和fp,神经网络节点数分别设置为Nα=729,Nq=2 401,Nr=3 125 和Np=2 401.估计误差分别定义为efα=fα-,efq=-,=fr-和efp=fp-.本文提出的复合学习控制方法记为“NN-CL”,无预测误差的经典神经网络控制方法记为“NN”.为验证所提方法的有效性,对两者进行仿真对比.
眼镜蛇机动是典型的过失速机动,是验证飞机大迎角飞行控制律的基本动作之一.眼镜蛇机动的迎角指令跟踪结果如图2 所示,迎角在2 s 内达到70°,随后迅速改出,回到初始配平状态.图3 为未知气动函数fα的估计及误差曲线,图4 为升降舵和推力矢量的偏转角.由仿真结果可知,所提控制方法对眼镜蛇机动指令的跟踪精度更高、学习效果更好.

图2 眼镜蛇机动迎角跟踪((a) 指令跟踪;(b) 跟踪误差)Fig.2 Angle of attack tracking under Cobra maneuver((a) Command tracking;(b) Tracking error)
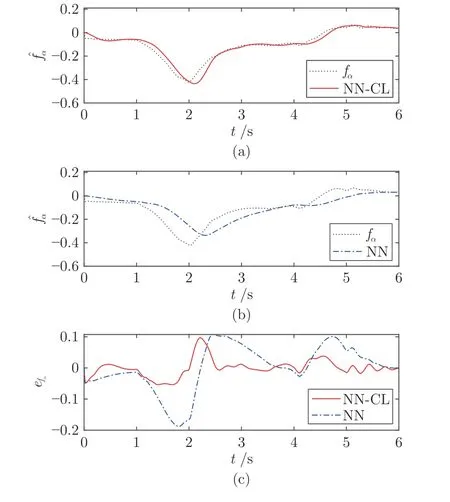
图3 眼镜蛇机动 fα 的估计值((a) 基于NN-CL 的 ;(b) 基于NN 的 ;(c) 估计误差)Fig.3 Estimation of fα under Cobra maneuver ((a) under NN-CL;(b) under NN;(c) Estimation error)
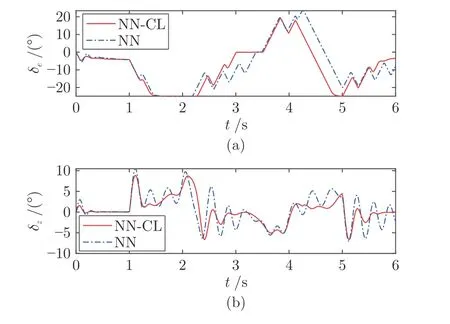
图4 眼镜蛇机动的操纵偏转量((a) 升降舵;(b) 俯仰推矢偏角)Fig.4 Control surface deflection under Cobra maneuver((a) Elevator;(b) Pitch thrust vector deflection angle)
赫伯斯特机动[19]是指飞机进入大迎角状态的同时机身滚转迅速改变机头方向的一种机动方式.赫伯斯特机动指令的迎角跟踪和滚转角速率跟踪及相应的跟踪误差如图5、图6 所示,由仿真结果可知,基于所提的大迎角控制方法,迎角和滚转角速率的跟踪误差几乎为0,并且基本无滞后,取得了较好的机动指令跟踪控制效果.战机的飞行状态和轨迹如图7、图8 所示,飞行速度由初始90 m/s 减小到了40 m/s 左右,在40 m/s~ 60 m/s 之间飞机绕速度轴进行滚转,整个大迎角低速度阶段持续了10 s左右;侧滑角实现了快速稳定;在机动过程中航迹方位角发生了180° 变化,实现了飞行速度的快速减小和快速转弯,转弯半径小于70 m,高度变化小于400 m.
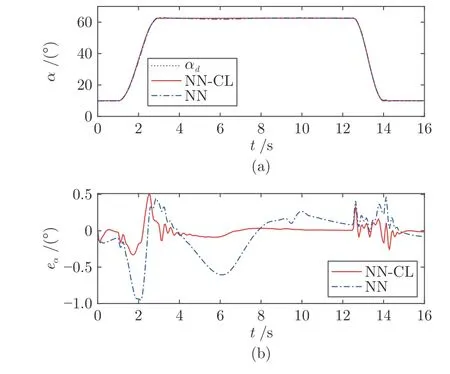
图5 赫伯斯特机动迎角跟踪((a) 指令跟踪;(b) 跟踪误差)Fig.5 Angle of attack tracking under Herbst maneuver((a) Command tracking;(b) Tracking error)
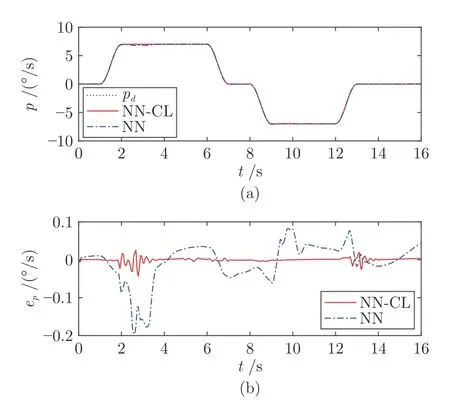
图6 赫伯斯特机动滚转角速率跟踪((a) 指令跟踪;(b) 跟踪误差)Fig.6 Roll angle rate tracking under Herbst maneuver((a) Command tracking;(b) Tracking error)
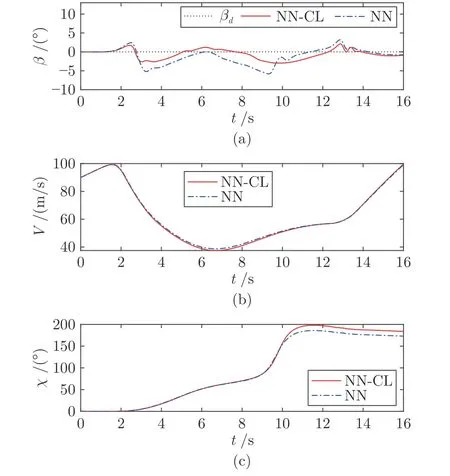
图7 赫伯斯特机动飞行状态((a) 侧滑角;(b) 速度;(c) 航迹方位角)Fig.7 Flight states under Herbst maneuver ((a) Sideslip angle;(b) Speed;(c) Flight path azimuth angle)
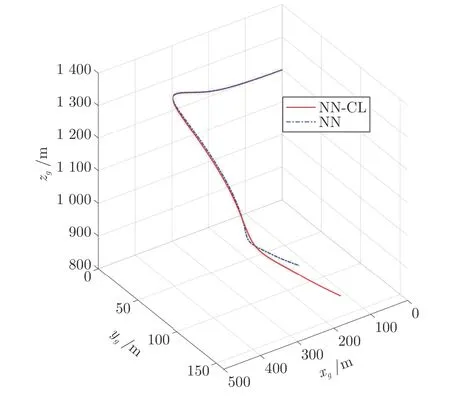
图8 赫伯斯特机动飞行轨迹Fig.8 Flight path under Herbst maneuver
图9、图10 为战机的操纵偏转量,在赫伯斯特机动过程中,常规气动舵面在整个机动过程中出现了较长时间的饱和状态,推力矢量偏角高达20°,以满足长时间大迎角过失速机动的操纵能力要求.图11~ 图14 为未知气动函数fα,fq,fr和fp的估计结果,所提出的复合学习方法能保证集总扰动的有效估计,实现了非线性、不确定和耦合干扰的精确补偿,进而提升了机动指令的跟踪效果.图15 为神经网络权重的估计曲线.

图9 赫伯斯特机动气动操纵舵面偏转((a) 升降舵;(b) 副翼;(c) 方向舵)Fig.9 Aerodynamic control surfaces deflection under Herbst maneuver ((a) Elevator;(b) Aileron;(c) Rudder)

图10 赫伯斯特机动推力矢量偏转((a)滚转推矢偏角;(b)偏航推矢偏角;(c)俯仰推矢偏角)Fig.10 Thrust vector nozzles deflection under Herbst maneuver ((a) Roll thrust vector deflection angle;(b) Yaw thrust vector deflection angle;(c) Pitch thrust vector deflection angle)
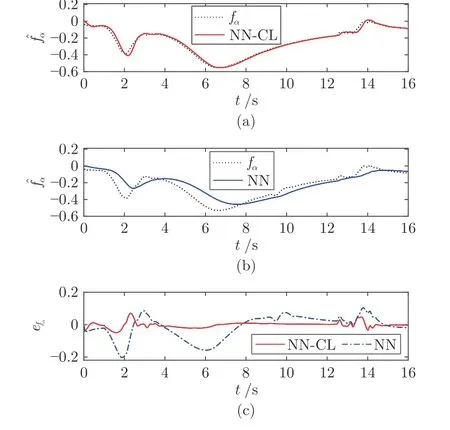
图11 赫伯斯特机动 fα 的估计值((a) 基于NN-CL 的 ;(b) 基于NN 的 ;(c) 估计误差)Fig.11 Estimation of fα under Herbst maneuver ((a)under NN-CL;(b) under NN;(c) Estimation error)

图12 赫伯斯特机动 fq 的估计值((a) 基于NN-CL 的 ;(b) 基于NN 的;(c) 估计误差)Fig.12 Estimation of fq under Herbst maneuver ((a) under NN-CL;(b) under NN;(c) Estimation error)
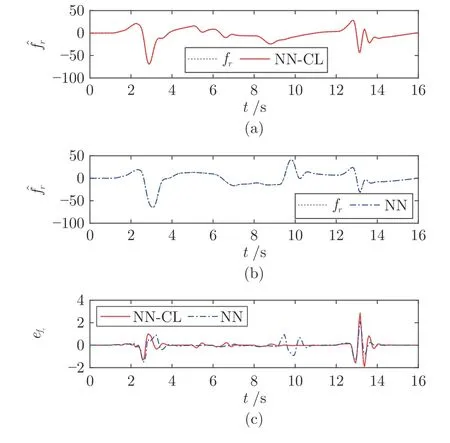
图13 赫伯斯特机动 fr 的估计值((a) 基于NN-CL 的 ;(b) 基于NN 的 ;(c) 估计误差)Fig.13 Estimation of fr under Herbst maneuver ((a) under NN-CL;(b) under NN;(c) Estimation error)
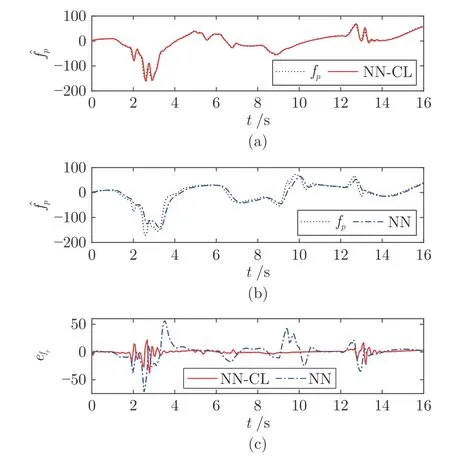
图14 赫伯斯特机动 fp 的估计值((a) 基于NN-CL 的;(b) 基于NN 的 ;(c) 估计误差)Fig.14 Estimation of fp under Herbst maneuver ((a)under NN-CL;(b) under NN;(c) Estimation error)

图15 神经网络权重估计值 ((a) ‖‖ ;(b) ‖‖;(c) ‖‖;(d) ‖‖)Fig.15 Estimation of NN weights ((a) ‖‖ ;(b) ‖‖;(c) ‖‖;(d) ‖‖)
考虑飞行过程中受到外部干扰和气动参数摄动的影响,在三通道加入扰动力矩Dq=1×104sin(2t+0.1) N·m,Dr=5×106sin(2t+0.1) N·m,Dp=5×106sin(2t+0.1) N·m,同时气动参数拉偏范围±30%.图16 为鲁棒验证仿真结果,迎角和滚转角速率指令的最大跟踪误差分别为0.210° 和0.053°/s,侧滑角控制在7° 以内,表明所设计控制方法对外部扰动和参数摄动表现出较高的鲁棒性.
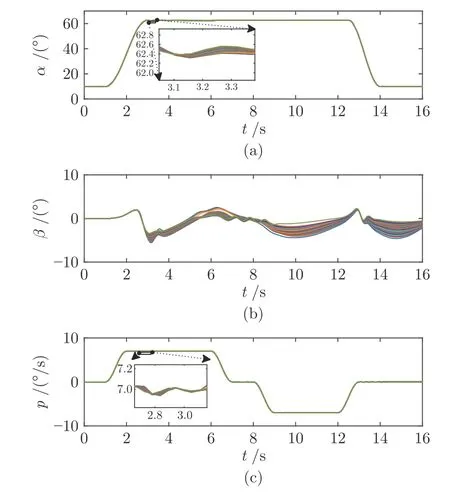
图16 鲁棒测试((a) 迎角;(b) 侧滑角;(c) 滚转角速率)Fig.16 Robustness verification ((a) Angle of attack;(b) Sideslip angle;(c) Roll angle rate)
综上所述,通过气动舵面与推力矢量的协同操纵,所设计的复合学习智能自适应控制方法实现了大迎角机动指令的有效跟踪和集总干扰的高效学习,对参数摄动和外部扰动具备自适应和干扰抑制能力.
5 结论
本文针对战机大迎角机动进行了复合学习智能控制方法研究.首先将六自由度非线性动力学解耦为迎角、侧滑角和滚转角速率子系统,针对分解后的子系统基于预测误差构建神经网络复合学习律,对未知气动函数进行估计和补偿,据此设计了智能自适应控制律获取操纵力矩,并基于串接链分配方法实现气动舵面与推力矢量的协同分配控制.通过李雅普诺夫稳定性分析证明了闭环系统的一致最终有界.典型大迎角机动仿真测试和参数拉偏测试表明所提方法具有更高的指令跟踪精度和不确定学习性能,同时对参数摄动和外界干扰表现出较强的鲁棒性.
在未来研究工作中可进一步考虑飞机舵面故障,研究控制分配与自适应容错控制方法.除此之外,将边界保护技术引入现有控制框架中,对保证大迎角机动的安全性和鲁棒性具有重要意义.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
交通建设与管理(2015年13期)2015-03-20
科技传播(2014年4期)2014-12-02