基于改进版Faster-RCNN的复杂背景下桃树黄叶病识别研究
2024-04-27 04:01张平川胡彦军张烨张彩虹陈昭陈旭
中国农机化学报 2024年3期
张平川 胡彦军 张烨 张彩虹 陈昭 陈旭


摘要:由于桃树黄叶病(以下简称PTYLD)初期症状不明显,现有的基于深度学习的桃树病害识别技术,存在识别准确率不高、识别品种单一的问题,提出一种基于Faster-RCNN的PTYLD識别模型。为提高模型对PTYLD识别准确率和识别多样性,提出使用RS-Loss函数代替RPN中的交叉熵函数、使用Soft-NMS算法代替原来的NMS算法,来改进Faster-RCNN。通过试验对比初始版和改进版Faster-RCNN对PTYLD的识别效果。试验结果显示,改进后的Faster-RCNN对黄叶病识别的各类别平均准确率mAP达90.56%、召回率达94.16%、准确率达92.53%,能识别常见的五种PTYLD。
关键词:桃树黄叶病;Faster-RCNN;复杂背景;软性非极大值抑制算法
中图分类号:S436.61: TP391.4 文献标识码:A 文章编号:2095-5553 (2024) 03-0219-08
Recognition of peach tree yellow leaf disease under complex background
based on improved Faster-RCNN
Zhang Pingchuan1, Hu Yanjun1, 2, 3, Zhang Ye 3, Zhang Caihong1, Chen Zhao1, Chen Xu1
(1. School of Computer Science & Technology, Henan Institute of Science and Technology, Xinxiang, 453003, China;2. School of Applied Engineering, Henan University of Science and Technology, Sanmenxia, 472099, China;3. College of Mechanical and Engineering, Xinxiang University, Xinxiang, 453003, China)
Abstract:
Since the initial symptoms of Peach Tree Yellow Leaf Disease (PTYLD) are not readily apparent, the existing deep learning-based recognition techniques for this disease suffer from issues like inaccurate recognition and limited recognition species. To address this, a recognition model of PTYLD based on Faster-RCNN (Region-based Convolutional Neural Network) is proposed. In order to enhance the recognition accuracy and diversity of PTYLD, RS-Loss function is used to replace the cross-entropy function in the Region Proposal Network (RPN), and the Soft-NMS algorithm is used to replace the original Non-Maximum Suppression (NMS) algorithm, so as to improve Faster-RCNN. The recognition effect of the initial and improved version of Faster-RCNN models on PTYLD is compared by experiments. The experimental results demonstrate that the improved Faster-RCNN achieves a mean average precision (mAP) of 90.56%, recall rate of 94.16%, an accuracy of 92.53% for each category of yellow leaf disease, and can identify five common PTYLD.
Keywords:peach tree yellow leaf disease; Faster-RCNN; complex background; Soft-NMS
0 引言
桃树黄叶病是因树体缺乏铁元素引起的[1],在中国黄淮流域多从4月中旬开始发病。发病后,从新梢上开始表现,嫩叶变黄而叶脉两侧仍绿,下部老叶表现较为正常。随着新梢的生长,如果不及时发现和治疗,病情逐渐加重。全树新梢顶端嫩叶严重失绿,叶脉呈浅绿色,全叶变为黄白色,叶尖、叶缘出现茶褐色坏死斑,后脱落。缺铁严重时,新梢节间短、发枝力弱、花芽不饱满,严重影响产量和品质[2, 3]。
诊断植物病害有几种方法:诊断植物病害的一种原始方法是根据农民的经验进行观察诊断,但不适合所有农民。第二种方法是使用光谱仪通过健康和患病叶片的光谱反射来诊断植物疾病,这种方法比人工诊断更准确[4],但光谱仪价格昂贵。第三种方法是通过提取叶片DNA进行聚合酶链反应[5]或实时聚合酶链反应[6],但对试验条件和专业操作有极高的要求。为了确保植物病害诊断的简单性、实时性、低成本和高准确性,很多学者提出基于图像的植物病害计算机辅助诊断识别方法[7]。
基于图像的计算机植物病害诊断可以看作是一个图像分类问题,通常可以分为对植物病害图片的特征进行提取,然后进行分类[8]。例如,Zhang等[9]使用CNN(Convolutional Neural Network)、Alexnet、SVM(Support Vector Machine支持向量機)对桃树黄单胞菌病害进行识别,由于研究使用的是纯色背景数据集,导致训练的模型泛化性和鲁棒性都比较差。Ren等[10]提出Faster-RCNN算法,将Fast-RCNN与RPN相结合,提高了检测速度与精度。Chen等[11]将Faster-RCNN与多部件方法结合提高了模型的检测速度。王宜全等[12]利用Faster-RCNN对植保无人机喷药进行了研究,有效减少了无人机由于偏离航道而产生的误喷现象。李林升等[13]针对初始版Faster-RCNN的RPN网络只有一个3×3的滑动窗口导致提取特征受限的问题,采取增加1×1,5×5两个滑动窗口的方法,提高了感受的范围与强度。但这种增加滑动窗口的同时,也增加了大量的候选框,导致计算量显著增加,同时也降低了网络的检测速度。
以上大部分研究采用初始版Faster-RCNN网络,其中RPN使用交叉熵函数存在以下两方面的缺陷:第一,该函数由于采用类间竞争机制,比较擅长于学习类间的信息,仅对正样本标签预测概率的准确性给予关注,而忽略了负样本标签的差异,从而导致学习到的特征比较散;第二,交叉熵损失函数通常是多个子任务的加权和,由于子任务和阶段的多样性以及每个任务重要性的不平衡,此类任务中,超参数往往较多,导致需要耗费大量的时间和资源来调这些超参数,并且最终可能仅得到次优模型。初始版Faster-RCNN采用NMS算法,该算法对于重叠阈值设定敏感,设定过低会导致漏检,设定过高会导致误检。
本文针对不同品种桃树叶片特征相差较大情况下,在前期的试验中存在检测耗时长、准确率低、漏检误检等情况。本文对Faster-RCNN网络进行两方面改进:使用RS-Loss函数[14]代替交叉熵函数、使用Soft-NMS算法[15]代替NMS算法。同时,为满足自然生长场景下黄叶病自动识别的应用需求,建立复杂背景和纯色背景两种数据集。
1 改进Faster-RCNN
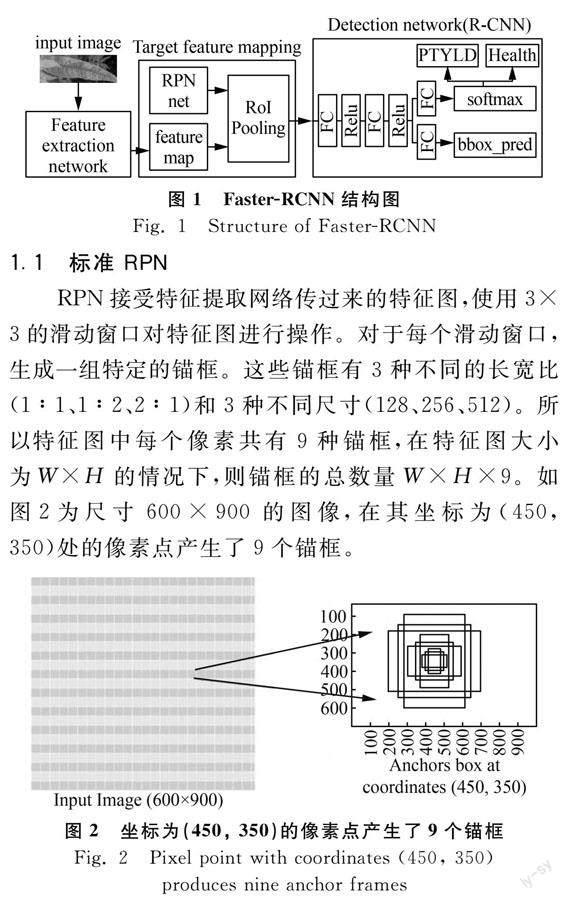
Faster-RCNN是在Fast-RCNN[16]基础上进行了优化改进,引入了RPN替换Fast-RCNN的选择性搜索(select search)算法[17]。RPN将区域建议提取集成到深度卷积神经网络,在每个位置同时预测目标边界框和类别置信度分数。Faster-RCNN可实现端到端的目标检测框架,提高检测精度和速度,生成建议框仅需10ms。Faster-RCNN网络由特征提取层、RPN、RoI Pooling层、分类和回归层等4部分组成,其结构如图1所示。特征提取层可以采用RESNET50[18]或VGG-16[19]网络。
1.1 标准 RPN
RPN接受特征提取网络传过来的特征图,使用3×3的滑动窗口对特征图进行操作。对于每个滑动窗口,生成一组特定的锚框。这些锚框有3种不同的长宽比(1∶1、1∶2、2∶1)和3种不同尺寸(128、256、512)。所以特征图中每个像素共有9种锚框,在特征图大小为W×H的情况下,则锚框的总数量W×H×9。如图2为尺寸600×900的图像,在其坐标为(450, 350)处的像素点产生了9个锚框。
在图2中,三种不同尺寸(128、256、512)的锚框。每种尺寸的锚框都有三个,这三个锚框的高度宽度比例分别为1∶1、1∶2和2∶1。现在特征图的每个位置设置了9个锚框,但可能有很多锚框里没有任何物体,因此,模型需要学习哪些锚框可能有目标物体。有目标物体的锚框可以被归类为前景,其他的则是背景。同时,模型需要学习前景锚框的偏移量,以适应物体。
锚框的定位和分类是由边界框调节器和边界框分类器完成的。边界框分类器计算每个锚框有目标物体的概率,根据此概率将锚框划分为前景或背景[20]。边界箱回归器根据x,y,w,h的值计算相对于前景锚框的偏移量,其中(x,y)是框的中心坐标,w和h是宽度和高度。由于RPN是一个模型,每个模型都有一个成本函数来训练,所以RPN也是如此。RPN的损失函数可以表示为式(1)。
L({pk},{tk})=1Ncls∑Lcls(pk,p*k)+λ1Nreg∑p*kLreg(t,t*k)(1)
式中:k——锚框的序列号;pk——每一个锚框的类别真值;Pk*——每一个锚框的类别预测值;tk——每一个锚框的偏移量真值;tk*——每一个Anchor的偏移量预测值;Lcls——分类损失;Lreg——回归损失;Ncls、Nreg——标准化值,Ncls=256,Nreg=2 400;λ——权重平衡参数,本文λ取1。
试验显示,λ值对准确率的提高并不明显,λ值从0.1到100,对试验结果的提高不到1%。
式(1)的第一项是有无目标物体的分类损失,第二项是仅当存在目标物体时边界框的回归损失。
使用交叉熵函数表示分类损失Lcls,具体计算如式(2)所示。
Lcls(pk,p*k)=-log[p*kpk+(1-p*k)(1-pk)](2)
使用soomth L1 loss表示Lreg,计算如式(3)和式(4)所示。
Lreg(tk,t*k)=∑k∈{x,y,w,h}smoothL1(tk-t*k)(3)
soomthL1(x)=0.5x2if|x|<1|x|-0.5otherwise(4)
式中:x——真实值和预测值的差值。
1.2 RPN损失函数改进
RPN中使用交叉熵函数即式(2),交叉熵函数由于采用了类间竞争机制,比较擅长于学习类间的信息,但是只关心对于正样本标签预测的准确性,而忽略了负样本标签的差异,从而导致学习到的特征比较分散。
标准RPN属于多重任务,其中包括分类、边框回归等多个子任务,因此这类任务的交叉熵损失函数通常是多个子任务的加权和。由于子任务和阶段的多样性以及每个任务重要性的不平衡,造成此类任务中超参数往往较多。这些超参数虽平衡不同任务重要性来使得模型获得更好性能,但由于调这些超参数需要大量的耗费时间和资源,并且最终可能仅产生了次优的模型,没有达到最优的模型。
为解决上述问题,本文采用Oksuz等[14]提出的 RS-Loss函数代替RPN中交叉熵损失函数,以便简化模型训练的复杂性,使模型可以达到更好的性能。RS-Loss总共由Rank和Sor两部分组成。Rank将每个正样本排在所有负样本之上,Sort根据IoU来对正样本进行排序。RS-Loss不仅将正负样本进行排序,还在正样本间进行排序,这一特性使得在训练过程中可以有效解决极端的类别不均衡问题,而不需要采用启发式的采样。此外,除学习率,RS-Loss不需要任何超参数调优,因为在RS-Loss中没有需要调优的任务平衡系数。
当前Rank误差记作lR(i),当前Sort误差记作lS(i),目标Rank误差记作l*R(i),目标Sort误差记作l*S(i),当全部正样本排在负样本之上时,NFP(i)=0,所以l*R(i)=0。Rank Loss为当前Rank误差lR(i)减去目标Rank误差l*R(i),即lR(i)-l*R(i),Sort Loss为当前Sort误差lS(i)减去目标Sort误差l*S(i),即lS(i)-l*S(i),将两式相加可得(lR(i)+lS(i))-(l*R(i)+l*S(i))。令(lR(i)+lS(i))为当前RS误差记作lRS(i),令(l*R(i)+l*S(i))为目标误差记作l*RS(i)。最终RS-Loss函数可表述为式(5)。
LRS:=1|P|∑i∈P[lRS(i)-l*RS(i)](5)
式中:P——正样本集合;i——样本编号;lRS(i)——当前rank误差和当前sort误差的总和。
采用式(6)计算lRS(i),l*RS(i)是目标rank error和目标sort error的总和,计算如式(7)所示。
lRS(i):=NFP(i)rank(i)lR(i): Current Ranking Error+∑j∈PH(xij)(1-yj)rank+(i)lS(i): Current Sorrting Error(6)
l*RS(i)=l*R(i)+∑j∈PH(xij)[yj≥yi](1-yi)∑j∈PH(xij)[yj≥yi]l*S(i): Target Sorting Error(7)
NFP(i)=∑j∈NH(xij)(8)
rank(i)=∑j∈P∪NH(xij)(9)
rank+(i)=∑j∈PH(xij)(10)
式中:j——样本编号;N——所有负样本的集合;NFP(i)——全部负样本中大于等于该正样本分类得分的数量;rank(i)——全部样本中大于等于该正样本分类得分的数量;rank+(i)——全部正样本中大于等于该正样本分类得分的数量;xij——样本j与样本i的分类得分之差;H(x)——单元阶跃函数,可表述为式(11);Y——预测框与真实框的交并比(IoU)的值。
当yj大于等于yi为真时,[yj≥yi]=1,否则[yj≥yi]=0。
H(x)=1x≥00x<0(11)
本文用RS-Loss函数代替分类损失中的交叉熵损失函数。改进后,模型回归损失的加权参数为RS-Loss除以回归损失。这种加权参数显著地减少了超参数的数量,训练模型时超参数不需要反复调节,只需调整学习率便可以提高模型性能。同时这种加权参数避免了进行多任务权重或系数调整以及某一个损失占据主导地位的情况。
1.3 NMS算法改进
NMS算法是各类目标检测算法中必要处理步骤。其思想是搜索局部最大值,抑制非極大值。在进行黄叶病检测过程中,在同一片叶子上会产生大量的候选框,这些候选框之间可能会相互重叠,每个框有一个置信度得分(confidence score),如图3(a)所示。NMS首先将候选框按置信度进行排序,选择置信度最高的边界框添加到最终的输出列表中,然后将其从边界框列表中删除。其次,计算所有边界框的面积,计算置信度最高的边界框与每一个候选框的IoU(intersection-over-union,即两个边界框的交集部分除以它们的并集),若该边界框的IoU值大于阈值,则删除该边界框。最后,重复以上操作直至边界框列表为空,选择出最优框的目标,如图3(b)所示。
NMS算法是一个不连续二值权重函数的特例,即式(12)所示。
Sk=SkIoU(M,bk)
式中:Sk——第k个预测框对应的置信度得分;M——最高得分的候选框;bk——待检测框;Nt——超参数设定的重叠阈值;IoU——bk和M的交集与并集的比。
由以上分析可知,NMS算法对于重叠阈值Nt设定敏感,其值设定过低会导致漏检,设定过高会导致误检。如图4所示,三片叶子的得分分别为0.81、0.92和0.87,若按照NMS算法处理,首先会选中得分为0.92的框,然后得分为0.87的候选框会由于IoU过高而删除。由于NMS算法只保留了最高分数的预测框,容易造成漏检,本例中得分最高的最前面的叶子被检出了,而被遮挡的叶子被漏检了。
为解决漏检误检问题,本文采用Soft-NMS算法替换NMS算法。soft-NMS吸取NMS的教训,在算法执行过程中不是简单删除IoU大于阈值的检测框,而是降低其得分。soft-NMS算法流程同NMS相同,但其对置信度得分使用函数运算以降低其置信度得分,而不是删除。Soft-NMS算法采用中的线性加权函数如式(13)所示。
Sk=SkIoU(M,bk)
图5为NMS算法与Soft-NMS算法识别效果对比图。传统Faster R-CNN中的NMS算法只选取重叠度区域中较高得分的候选框,造成了部分目标候选框的漏检。而改进后的Soft-NMS算法保留了重叠区域中得分较低的候选框,降低了PTYLD目标识别的漏检率。
改进前后Faster-RCNN结构如图6所示。
2 数据集
为了验证复杂背景数据集和纯色背景数据集所训练出来模型的性能差异,制作了黄叶病复杂背景和纯色背景两种数据集。
2.1 复杂背景数据集
健康叶子数据集中由173张来自PlantVillage[21]上的一个开放图像数据库(Hughes and Salathé,2015)。其余529张健康叶子图片来自河南科技学院农业信息技术实习基地——河南省新乡某苹果树种植专业合作社。由于不同品种的桃树叶子有一定差异,为了提高模型的泛化性和鲁棒性。共采集了水蜜桃、黄桃、油桃、蟠桃、寿星桃等五种不同品种的桃树健康叶子。健康桃树叶数据集共有702张图片。
果园的桃树叶子由于大多数情况桃树均处于健康状态,因此要采集黄叶病的桃树叶有很大难度。经过大量的调查找到了一部分患有黄叶病的桃树叶子。黄叶病数据集通过以下两种方式获取:第一,通过互联网获取了黄叶病的一些图片,共获取黄叶病初期照片200张;第二,对不同品种患有黄叶病的桃树进行图像采集,共取得图片600张,选取332张黄叶病初期的照片组成数据集。因此初期黄叶病图片原始数据集共532张,通过增强数据集达到1064张。最终形成了由1766张图片组成的复杂背景黄叶病数据集(以下简称复杂背景数据集),如图7所示。
將以上数据集分为训练集、验证集和测试集。按照机器学习对数据集分配的经验将三者按照7∶2∶1的标准进行划分,如表1所示。
2.2 纯色背景数据集
本数据集共有853张图片,健康桃树树叶353张,黄叶病病叶500张。其中健康桃叶图片353张来自PlantVillage上的一个开放存取图像存储库,黄叶病病叶图片来自悦农果园。通过使用小米note3手机现场拍摄病叶照片,然后进行单叶片截取。纯色背景黄叶病数据集(以下简称纯色背景数据集)如图8所示。
3 试验与分析
3.1 试验环境
试验环境由计算机硬件和开发平台两部分组成,试验环境由计算机硬件和开发平台两部分组成,操作系统采用Windows10 (64bit)professional edition;CPU采用AMD Ryzen 7 5800X 8-core CPU;内存16 GB;GPU采用NVIDIA GeForce RTX3060;深度学习框架采用Pytorch 1.10.0;编程语言为Python 3.7;CUDA版本为10.2。
3.2 基于原版Faster-RCNN的纯色背景与复杂背景对比试验分析
本文制作的黄叶病数据集分为纯色背景和复杂背景两种数据集。使用原版Faster-RCNN神经网络,进行了训练试验,训练迭代了1000次,训练结果显示,纯色背景数据集在训练阶段loss下降非常快,利用复杂背景数据进行验证时loss却不能正常下降如图9(a)所示。在使用复杂背景数据集进行模型训练,训练出的模型有较好的表现,如图9(b)所示。在训练集和验证集上loss都能较好的下降。
由图9(a)可看出,loss在训练集上得到很好的下降,但在验证集上不能很好的下降。其主要原因是,训练集数据全部采用纯色背景图片,验证集数据采用了复杂背景图片。表明了纯色背景数据集训练的模型存在着泛化性差的问题[22, 23]。由图9(b)可以看出loss无论是在训练集还是在验证集上都能较好的下降,说明复杂背景数据集训练的模型有着较强的泛化性。因此本文建议在制作数据集时应避免使用纯色背景数据集。
为了更直观比较两种数据集所训练出来的模型差异,本文选用mAP[24](mean Average Precision,即各类别AP的平均值)、Recall(召回率)、Accuracy三个常用指标作为衡量模型的性能的评价指标。表2为纯色背景和复杂背景数据集训练结果,表明复杂背景数据集训练的权重文件较纯色背景数据集有着更好地识别效果。
3.3 基于复杂背景对比试验分析
本文使用复杂的背景数据集训练了四种类型的 Faster-RCNN神经网络,分别是Original版本、Softer-NMS函数、RS-Loss函数和Softer-NMS+RS损失函数。训练迭代了3000次,训练集损失变化如图10所示。可以看出,采用Softer-NMS+RS-Loss函数的Faster R-CNN具有最低的损失值,且训练过程中收敛较快。
同时本文对四种Faster-RCNN网络的mAP、Recall、Accuracy三个常用指标值进行了对比,试验的结果如表4所示。
由表4可见,不同的网络对黄叶病的检测精确度不同,采用Softer-NMS+RS-Loss函数的Faster-RCNN网络的三个评价指标得分最高,相较于初始版本三个指标几乎均提高20%,验证了本文所提改进方法对黄叶病检测精确度提升的有效性。
为比较采用Softer-NMS+RS-Loss函数的Faster-RCNN与初始版Faster-RCNN图像识别效果,本实验采用这两种神经网络训练出的最优权重文件对黄叶病图片进行识别如图11所示。由此看出在识别明显的黄叶病方面,两种神经网络效果一样,但对于不太明显的黄叶病症状采用Softer-NMS+RS-Loss函数的Faster-RCNN有较好的表现。
4 结论
针对复杂背景下PTYLD初期检测难度较大,本文提出了一种改进版的Faster-RCNN神经网络,实现了PTYLD准确识别,所提方法具有以下优点。
1) 本文提出的采用RS-Loss+Soft-NMS的Faster-RCNN对PTYLD初期症状的识别准确率显著提高,mAP达90.56%、召回率达94.16%、Accuracy达92.53%,解决了PTYLD初期症状不易识别的难题。
2) 采用Soft-NMS算法替换原模型中的NMS算法,保留了重叠区域中得分较低的候选框,降低了PTYLD目标识别的漏检率。
3) 本文所提的PTYLD的机器识别算法,是智慧果园研究的一项重要技术,对果园的智能化管理有着重要的实际意义。
参 考 文 献
[1]张苗. 冀中地区桃树缺铁黄化发生规律及其防治技术[D]. 保定: 河北农业大学, 2019.Zhang Miao. Occurrence and control techniques of iron deficiency chlorosis of peach trees in central Hebei [D]. Baoding: Hebei Agricultural University, 2019.
[2]刘现国, 李淑恒. 桃树缺铁黄叶病的发生与防治[J]. 种子科技, 2016, 34(8): 83.
[3]郑科, 王万魁, 尉青. 山西运城地区黄叶病形成的原因与防治方法[J]. 果农之友, 2021(9): 37-38.
[4]Sasaki Y, Okamoto T, Imou K, et al. Automatic diagnosis of plant disease-spectral reflectance of healthy and diseased leaves [J]. IFAC Proceedings Volumes, 1998, 31(5): 145-150.
[5]Henson J M, French R. The polymerase chain reaction and plant disease diagnosis [J]. Annual Review of Phytopathology, 1993, 31(1): 81-109.
[6]Koo C, Malapi-Wight M, Kim H S, et al. Development of a real-time microchip PCR system for portable plant disease diagnosis [J]. PloS one, 2013, 8(12): e82704.
[7]Kailey K S, Sahdra G S. Content-based image retrieval(CBIR) for identifying image based plant disease [J]. International Journal of Computer Technology and Applications, 2012, 3(3).
[8]Yan Z, Zhan Y, Peng Z, et al. Multi-instance deep learning: Discover discriminative local anatomies for bodypart recognition [J]. IEEE Transactions on Medical Imaging, 2016, 35(5): 1332-1343.
[9]Zhang K, Xu Z, Dong S, et al. Identification of peach leaf disease infected by Xanthomonas campestris with deep learning [J]. Engineering in Agriculture, Environment and Food, 2019, 12(4): 388-396.
[10]Ren S Q, He K M, Girshick R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks [J]. IEEE Transactions on Pattern Analysis amp; Machine Intelligence, 2015, 39(6): 1137-1149.
[11]Chen C K, Li Y. Aeroplane detection in static aerodrome based on Faster RCNN and multi-part model [J]. Journal of Computer Applications, 2017, 37(Z2): 85-88.
[12]王宜全, 吳扬东, 祁兵. 基于Faster RCNN的间作类农田无人机喷雾方法研究[J]. 中国农机化学报, 2019, 40(6): 76-81.Wang Yiquan, Wu Yangdong, Qi Bing. Study on UAV spray method of intercropping farmland based on Faster RCNN[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(6): 76-81.
[13]李林升, 曾平平. 改进深度学习框架Faster-RCNN的苹果目标检测[J]. 机械设计与研究, 2019, 35(5): 24-27.
[14]Oksuz K, Cam B C, Akbas E, et al. Rank & sort loss for object detection and instance segmentation [C]. 2021 IEEE/CVF Inter-national Conference on Computer Vision(ICCV), 2021: 2989-2998.
[15]Bodla N, Singh B, Chellappa R, et al. Soft-NMS—improving object detection with one line of code [C]. Proceedings of the IEEE International Conference on Computer Vision, 2017: 5561-5569.
[16] Zhang Y, Song C, Zhang D. Small-scale aircraft detection in remote sensing images based on Faster-RCNN [J]. Multimedia Tools and Applications, 2022, 81(13): 18091-18103.
[17]Uijlings J R R, Van De Sande K E A, Gevers T, et al. Selective search for object recognition [J]. International Journal of Computer Vision, 2013, 104: 154-171.
[18]He K, Zhang X, Ren S, et al. Deep residual learning for image recognition [C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 2016: 770-778.
[19]Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition [J]. Computer Science, 2014, 42(5): 324-328.
[20]方帥, 金忍, 于磊, 等. 一种基于RGBD图像的似物性采样算法[J]. 图学学报, 2015, 36(6): 931-936.
[21]Hughes D P, Salathe M. An open access repository of images on plant health to enable the development of mobile disease diagnostics [M]. arXiv: Computers and Society, 2015.
[22]Ge Zhao, Wu Hao, Zhao Can, et al. High-accuracy event classification of distributed optical fiber vibration sensing based on time-space analysis [J]. Sensors, 2022, 22(5).
[23]Peng X, Wang F Y, Li L. Towards better generalization of deep neural networks via non-typicality sampling scheme [J]. IEEE Transactions on Neural Networks and Learning Systems, 2022, 34(10): 7910-7920.
[24]Seyed-Salehi M, Kim B H, Yang S Y, et al. Effect of Cr elimination on flow behavior and processing map of newly developed ECO-7175 aluminum alloy during hot compression [J]. Transactions of Nonferrous Metals Society of China, 2022, 32(5): 1442-1459.
基金项目:河南省科技厅科技攻关项目(222102210116、212102310553)
第一作者:张平川,男,1968年生,河南新乡人,博士,副教授;研究方向为智慧农业。E-mail: 362764053@qq.com
通讯作者:胡彦军,男,1981年生,河南郑州人,硕士,副教授;研究方向为计算机视觉、农业信息化。E-mail: 13622572@qq.com