果园精准施肥技术装备研究进展
2024-04-27 14:46:18袁全春曾锦雷哓晖徐陶李雪吕晓兰
中国农机化学报 2024年3期
袁全春 曾锦 雷哓晖 徐陶 李雪 吕晓兰

摘要:精准施肥技术装备是实现精准施肥、提高肥料利用率的重要载体。列举国内外学者在果园精准施肥技术装备开展的研究,从排肥量精准控制和施肥位置精准控制两个方面,总结归纳现有技术实现精准施肥的方案。指出现有技术装备无法根据单棵果树的养分需求现场配制个性化肥料、定点施肥技术装备应用较少、基于果树生长规律的施肥决策模型缺乏等问题。提出要加强政策支持、深入研究高质量定点施肥技术和智能决策模型等对策建议。
关键词:果园;精准施肥;农业机械;排肥量控制;施肥位置控制
中图分类号:S224.2 文献标识码:A 文章编号:2095-5553 (2024) 03-0058-09
Research progress on precision fertilization technology and equipment in orchards
Yuan Quanchun1, 2, 3, Zeng Jin1, 2, 3, Lei Xiaohui1, 2, 3, Xu Tao1, 2, 3, Li Xue1, 2, 3, Lü Xiaolan1, 2, 3
(1. Institute of Agricultural Facilities and Equipment, Jiangsu Academy of Agricultural Sciences, Nanjing,210014, China; 2. Key Laboratory of Modern Horticultural Equipment, Ministry of Agriculture and RuralAffairs, Nanjing, 210014, China; 3. Southern Orchard (Peach, Pear) Fully Mechanized Research Base,Ministry of Agriculture and Rural Affairs, Nanjing, 210014, China)
Abstract:
Precision fertilization technology and equipment is an important carrier to realize precision fertilization and improve fertilizer utilization. The research conducted by scholars at home and abroad on precision fertilization technology and equipment in orchards is listed, and the scheme of existing technology to realize precision fertilization is summarized from two aspects: precise control of the amount of fertilizer discharged and precise control of the fertilization position. Pointed out that the existing technology and equipment can not be based on the nutrient needs of a single fruit tree on-site preparation of personalized fertilizers, the application of point fertilization technology and equipment is relatively small, based on the growth of fruit trees, the lack of fertilizer decision-making model and other issues. It puts forward countermeasure suggestions such as strengthening policy support, in-depth research on high-quality fixed-point fertilization technology and intelligent decision-making models.
Keywords:orchard; precision fertilization; agricultural machinery; fertilizer discharge control; fertilization position control
0 引言
不合理施肥一直是我国农业生产存在的问题,果园施肥量超过发达国家的2倍[1],造成肥料浪费和环境污染,对经济效益和生态效益產生不利影响。近年来,国家持续推进肥料减施行动,不合理施肥得到一定改善,但肥料利用率仍有提升空间。精准施肥是提高肥料利用率的重要途径,精准施肥技术装备是载体。
果园施肥主要分为春夏季的化学肥料追肥和秋冬季的有机肥深施,深施有机肥主要为了改善根系周围土壤环境,对精准度没有太高要求。精准施肥主要应用于追肥阶段,此阶段需要快速供给果树生长所需养分。而且,由于果树个体生长和土壤养分状况差异,其所需的氮磷钾等养分也存在差异。过多施用污染环境,过少施用不利于果树生长,需要精准施肥,在需要的位置施入需要的肥量。目前果园主要基于传统的经验模型,指导精准施肥量和施肥位置,在现有施肥方式和技术装备的基础上,开展精准施肥技术装备研究。
国内外学者对果园精准施肥技术装备开展了广泛的研究,取得了重要的成果。本文通过查阅文献,总结归纳国内外果园精准施肥技术装备的研究进展,洞悉发展趋势,旨在发现尚未解决的问题,寻找进一步提高肥料利用率的突破点,提升果园养分精细化管理水平。
1 国内外研究现状
果园施用的肥料主要有液态肥和固体肥,针对这2种类型的肥料,国内外学者从排肥量精准控制和施肥位置精准控制方面开展了广泛而深入的研究,并开发研制了相应的控制系统和施肥装备。
1.1 排肥量精准控制
精准控制排肥量是精准施肥的关键,主要涉及液态肥精准排肥、固体肥精准排肥、排肥量检测和排肥故障监测。
1.1.1 液态肥精准控制
液态肥是果园常用的肥料之一,现有精准排肥控制主要分为被动供肥和主动供肥。被动供肥以文丘里管吸肥为代表,通过调节电磁阀开关频率实现排肥量控制;主动供肥采用泵排肥,通过控制泵的转速、工作时间或系统压力控制排肥量。氮磷钾等养分的单独供给,在线配肥也是精准施肥的重要措施,在现有研究中也有体现。
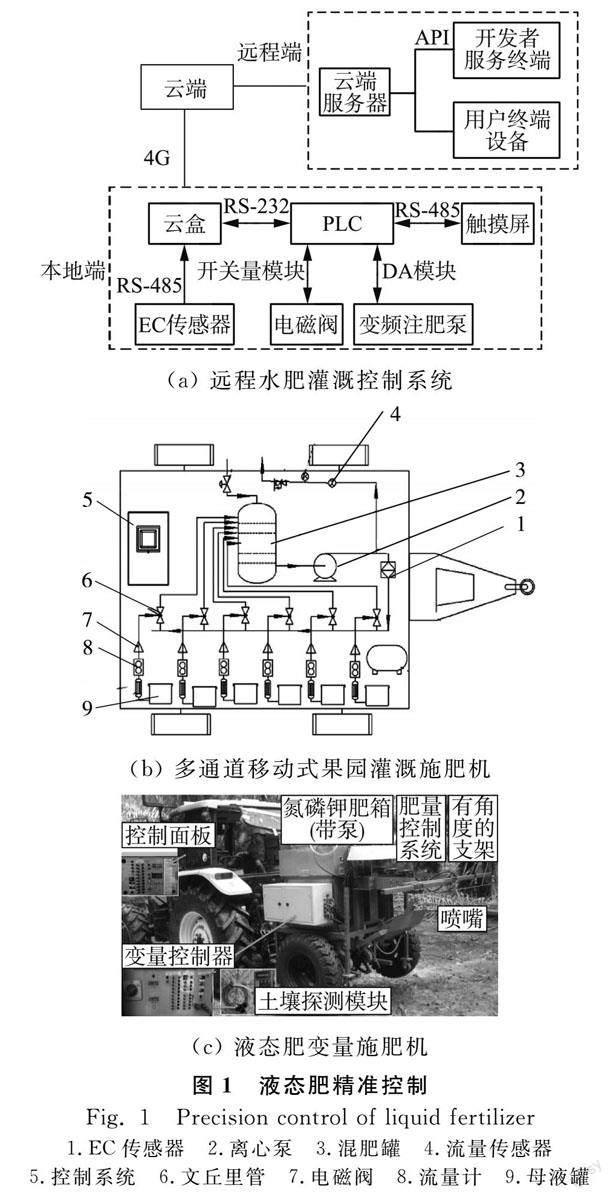
朱德兰等[2]基于物联网技术,开发了远程水肥灌溉控制系统,见图1(a)。该系统将自整定模糊PID算法加入远程服务终端,通过算法控制本地端注肥泵频率,实现肥液电导率控制。试验表明,目标电导率越大,控制约精准。当目标电导率为2.5 mS/cm时,稳态时间为120 s,超调量为20.8%。左志宇等设计了一种多通道移动式果园灌溉施肥机,可按需精准控制施肥浓度、处方和灌溉量,见图1(b)。具有6路基于文丘里管的吸肥通道,可根据EC传感器等反馈的测量值,同时精准控制多种肥料供给。灌溉量相对误差≤0.54%,EC值绝对误差≤0.07 mS/cm,配肥相对误差≤2.00%。Yamin等[3]设计了一种基于土壤氮磷钾状态实时探测的液态肥变量施肥机,可以变量施用氮磷钾养分,见图1(c)。采用基于比色法的数字土壤测试套件测定土壤肥力,采用3路泵分别控制氮磷钾液态肥的供给,通过3个水平喷嘴在树的一侧施肥,通过3个安装在45°悬架上的喷嘴在树上施肥。当探测到树体时,结合行进速度,控制相应量的氮磷钾喷出。
1.1.2 固体肥精准控制
固态肥精准排肥的研究主要集中在排肥器结构优化设计和控制系统开发,排肥器以螺旋排肥器为主,控制上主要通过控制排肥器转速和排肥口开度调节排肥量。多养分肥料配比掺混方面也有相关研究。
袁全春等[4]开发了一种果园有机肥变量排肥控制系统,见图2(a)。结构上,采用排肥口两侧旋向相反且相位角180°的螺旋进行排肥,改善螺旋排肥的排肥量波动。控制上,根据理论排肥量和作业速度,实时计算液压马达目标转速,采集液压马达实际转速。开发PID算法控制比例流量阀开度,调节液压马达转速,实现排肥量精准控制。试验结果表明,排肥量相对误差≤6.20%、变异系数≤8.69%,准确性和均匀性较好。杨文武等[5]针对螺旋排肥器物料流量随时间波动变化造排肥不均匀的问题,研究了排肥口长度和排肥口角度对螺旋排肥器排肥均匀性的影响。试验结果表明,排肥口长度为60 m、排肥口角度为135°时,排肥效果最佳,排肥均匀性变异系数为5.41%。顿国强等[6]采用倾斜排肥口方案提升螺旋排肥器排肥均匀性。通过仿真分析得到,当斜口长度为105 m、斜口角度为30°~44°、开口宽度为40.05~55.00 m时,排肥均匀性较佳,变异系数小于15%,优于传统螺旋排肥器。同时,基于排肥转速流量曲线,设计了排肥控制器,可实现精准施肥。顿国强等[7]对采用错位叠加单螺旋原理的弧槽双螺旋式排肥器进行分析优化,见图2(b)。通过试验得到,螺距35 m、弧槽半径17.5 m、中心距35 m时,排肥均匀性和准确性最佳。排肥精度为3.35%,排肥均匀性变异系数较优化前双螺旋排肥器和单螺旋排肥器分别降低7.26%~15.48%。
杨欣伦等[8]设计了叠片式排肥量调节装置,通过改变叠片相互搭接所形成的开口大小,实现排肥量调节,见图3。通过试验确定了最佳结构参数,折弯线相对中轴线偏转角4.63°、向内折弯角14.4°、向外折弯角10.57°、起点与中轴线距离4.27 mm。田间试验表明,排肥一致性变异系数为0.81%,稳定性变异系数为0.42%,均匀性变异系数为1.85%。刘彩玲等[9]设计了一种水平涡轮叶片式精量排肥器,可通过控制排肥涡轮转速调节排肥量。通过试验得到,当涡轮叶片数量为8个、排肥口开度为40°时,对磷酸二胺的排肥均匀性系数接近97%、稳定性变异系数小于2%,均有较好的排肥均匀性和稳定性。白秋薇等[10]研制了一种排肥轮槽口体积可变的排肥器及控制系统。根据目标施肥量和冠层直径调节排肥轮槽口体积,同时根据作业速度调节排肥轮转速,实现排肥量精准控制。构建了单棵果树目标施肥量与排肥轮转速、作业速度、槽口体积、冠层直径的关系及控制规则。试验结果表明,排肥量相对误差小于4.83%、变异系数小于6.96%。刘莫尘[11]、闫银发[12]等设计了一种均有掺混功能的变比配肥定向撒肥机,见图4。通过仿真分析,排肥槽轮转速在20~80 r/min时,掺混均匀性较好,配肥偏离度标准差小于0.4。通过试验优化撒肥盘结构参数和工作参数,当撒肥板长度为450 mm、高度为80 mm、折弯角为100°、转速为290.1 r/min、掺混腔收料口与撒肥盘中心距为88.2 mm时,撒肥均匀性较好,肥料分布变异系数小于40%。
1.1.3 排肥量检测
闭环控制是实现精准排肥的有效途径,液态肥常用流量传感器来检测排肥量作为反馈,而固态肥排肥量检测相对困难。现有学者基于电容法、静电感应、微波法、激光雷达探测等开展了相关研究,并开发了传感器。
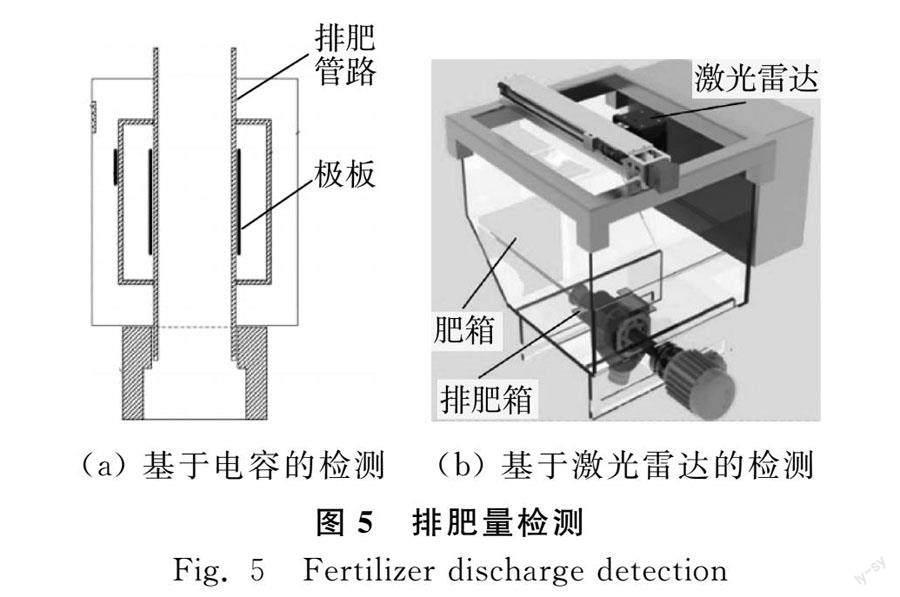
周利明等[13]利用肥料与空气介电特性差异,设计了基于电容法的施肥量在线检测系统,见图5(a)。构建了考虑温度变化影响的氮磷钾肥料质量流量与电容输出的关系模型。试验结果表明,系统能够准确对肥料质量流量进行在线检测,相对误差为3.75%;同时能够识别堵塞故障,准确率达100%。贾洪雷等[14]基于静电感应原理,设计了颗粒肥料质量流量传感器。设计了环形电极检测肥料摩擦、碰撞产生的电荷强度,通过放大后输出感应电流。标定了肥料流量与感应电流的关系,以根据感应电流得到肥料流量。试验结果表明,大颗粒尿素、过磷酸钙、氯化钾的检测误差分别为3.9%、5.1%、5.9%,肥料粒径越小,误差越大。杨立伟等[15, 16]开发了基于微波法的颗粒肥料质量流量测量系统,提出了肥料质量流量测量模型和方法。通过最小二乘法构建了2种复合肥的流量与传感器输出值的映射关系,决定系数均大于0.985 8。撒可富的测量范围为1 119.8~2 065.9 g/min,相对误差为6.35%;史丹利的测量范围为1 071.9~1 877.9 g/min,相對误差为4.85%。
Yin等[17]提出了一种利用近红外光电传感器测量颗粒堆积厚度的方法。根据光强在不连续介质中的衰减特性,建立了输出电压与颗粒堆积厚度之间的高斯回归模型。将3个传感器平行布置成阵列,测量颗粒堆积厚度的变化过程。提出了一种以输出电压时间序列为输入的反向传播(BP)神经网络来预测颗粒质量。经实验数据训练后,在0~600 g的颗粒质量范围内,BP神经网络的测量误差和平均误差分别小于±18.2 g和7.6 g。姜萌等[18]提出了基于光量阻挡原理的颗粒肥流量检测方法,构建了以肥料流量与传感器响应电压相关性为基础的模型。试验验证了肥料流量与传感器累计响应电压存在较强的相关性,决定系数高于0.992。基于加速组建立的模型误差最低,对尿素和复合肥的平均绝对百分比误差分别为5.18%和4.07%。通过试验得到检测元件密度越大,检测误差越低。Zhao等[19]基于激光雷达开发了一种将肥料点云数据转化为肥料体积的高效算法,见图5(b)。该算法采用escape值滤波、离群值去除、有序点云集构建、点云平滑等方法对点云数据进行降噪,并采用动态区域提取显著减少计算量,通过改进Delaunay三角剖分将点云数据高效转化为体积,进而计算出肥料排放质量。试验结果表明,施肥速度在20~70 r/min范围内,氮磷钾的检测误差分别为2.34%~4.66%、2.14%~4.25%和1.87%~4.59%,具有较高的精度。
1.1.4 排肥故障监测
故障监测是排肥量精准控制的重要组成部分,及时发现并排除故障是精准排肥的保障。可以借助排肥量传感器进行监测,也可以结合其他控制参数的状态作判断,现有研究较少。
翟长远等[20]针对果园变量施肥机,提出扇叶旋转落肥感应方法,研制故障监测装置,单次排肥最少感知落肥通断信号2次,监测准确率达到100%,见图6(a)。陈远玲等[21]针对甘蔗施肥机肥料易结块堵塞问题,开发基于粒子群—前反馈神经网络预测的施肥监控系统,见图6(b)。通过前反馈算法构建输入(马达压力、转速、肥箱中肥量)与输出(施肥机构工作空载状态、正常状态、重载状态、堵塞状态)的映射关系,利用粒子群算法优化。结果表明:工作状态识别准确率为89%,重载状态控制马达正反转消除堵塞概率为87.5%。
1.2 施肥位置精准控制
在需要的位置施肥也是提高肥料利用率的重要措施,国内外学者在施肥位置精准控制方面开展了深入的研究,包括开沟施肥、对靶施肥、穴施肥和定点施肥。
1.2.1 开沟施肥
开沟施肥是施肥装备最常采用的方式,主要从土肥混合、曲线开沟、深度控制、分层施肥等方面开展研究,实现施肥位置精准控制,在根系的需肥位置施肥。
肖宏儒等[22]研制了果园双螺旋开沟施肥机,采用前轴破土,后轴施肥搅拌的方案,见图7(a)。后螺旋轴中空,并开有排肥孔,在土壤中旋转时将肥料抛出,并和土壤混合均匀。该方案能够实现0~400 mm全层混施,使各层根系均能得到养分供给。朱新华等[23]提出密植苹果园有机肥机械化环沟施肥方法,在果树单侧以连续曲线开沟,包围根系,同时施肥、混土,见图7(b)。研制的施肥机借助检测到的果树定位信号,控制开沟混肥器横向运动,配合行进作业完成曲线开沟。试验结果表明,改装备能够准确识别果树,进行连续环沟施肥,且全层土肥混合,施肥宽度210 mm±6.3 mm、深度300 mm±19.5 mm,平均功耗5.84 kW。张宏建等[24]研制了一种果园双行开沟施肥机,能够自动调节开沟深度,保证施肥位置一致。根据角度传感器反馈的开沟部件角度,实时计算开沟深度,通过电磁阀控制液压缸伸缩,调节开沟深度,使其保持在目标值。试验表明,开沟深度稳定系数≥94.76%,开沟深度一致性较好。袁全春等[25, 26]研究了一种果园有機肥深施机,通过前、中、后混合回填部件将土壤和肥箱排出的有机肥混合后,依次回填至沟中,实现分层施肥,见图7(c)。通过试验得到,混合回填部件中搅拌桨叶侧向角为90°、俯仰角为60°、转速为200 r/min、分布长度≥400 mm时,土肥混合均匀度最高;当前、中、后卸料口导流板倾斜角度分别为70°、65°和50°时,各层土肥可以在施肥沟整个宽度范围内均匀分布。
1.2.2 对靶施肥
对靶施肥是只在有果树的位置施肥,在株间位置不施肥,能够有效减少施肥量。主要研究涉及果树探测识别和间歇性排肥控制。
Yamin等[3]设计了一种变量施肥机,当探测到树体时才开始施肥,只在油棕树周围最有效根系的5 m×5 m(25 m2)面积上喷施液态肥料,见图8(a)。白秋薇等[10]研制了一种基于激光雷达传感器实时探测果树冠层位置的柑橘果园自动对靶施肥装置。试验结果表明,落肥起点和终点偏离冠层边缘最大距离分别为-0.15 m和-0.09 m,均在果树冠层范围内。Yang等[27]提出一种枸杞树双模型检测方法,包括树干检测模型和树冠检测模型,可适用于不同时期的枸杞果园,见图8(b)。同时设计了一种基于光电传感器的果园定向变量施肥系统,以实现只在有果树的位置施肥。试验结果表明,检测树干、连续冠层和不连续冠层时的平均中心偏移距离分别为4.1 cm、9.1 cm和13.1 cm,能够满足枸杞对靶施肥要求。杨洲[28]、宋帅帅[29]等分析了香蕉根系与分布规律,划分了主次施肥区,确定了施肥决策。幼苗期、营养体生长期和生殖体发育期的施肥长度分别为≤0.22 m、≤0.42 m、≤0.84 m,主次施肥区施肥量比例分别为8∶5、2∶1、11∶5,施肥长度比例分别为2∶1、5∶1、3∶1。研制了基于红外光电传感器探测果树位置的施肥装备,能够只在施肥区变量施肥。仝敏[30]设计了一种基于双目视觉识别苹果树位置的对靶精准施肥控制系统。系统采用四次多项式拟合视觉测量误差,测量精度为99.3%,测量误差为6.6 mm。Chang等[31]基于颜色共现矩阵的纹理分析与C++算法,开发了传感和控制系统软件,以区分蓝莓与杂草,只在蓝莓位置施肥。
1.2.3 穴施肥
穴施肥与对靶施肥类似,也属于间歇施肥,但更加灵活,可以通过控制挖坑的位置,在需肥的位置进行施肥,穴施肥装备结构相对简单,新的研究内容较少。
苑进等[32]设计了一种原位混肥挖坑栽植机,采用螺旋钻头,底部用于挖坑升土、上部用于掺混土壤和菌肥,如图9所示。到达目标深度后进行一定时间的混肥作业,然后提升螺旋,待放下树苗后回填土肥。根据土肥混合均匀度确定掺混作业参数为转速250 r/min、时间14 s。田间试验表明,单次作业时间小于3 min,土肥混合均匀都变异系数小于16%,作业深度0~400 mm,挖坑直径500 mm。巴利珍[33]设计了一种果园施肥挖坑机,穴坑直径150~300 mm、最大深度800 mm,能够调节施肥深度,能够为深施肥提供技术支撑。
1.2.4 定点施肥
定点施肥是穴施肥的进一步发展,可以控制注肥装置到达根系周围的任一点,实现肥料的精准投放。现有研究多采用高压气体疏松土壤,再使液态肥或固体肥扩散到土壤裂隙中[35]。
奚小波等[35]研制了一种气爆松土注肥机,通过钻杆钻土、气爆松土、液肥注射、钻杆回升4个步骤,实现定点施肥,见图10(a)。优化了钻头参数,锥角为60°、钻杆半径为12.5 mm。试验结果表明,300 mm深度、0.8 MPa气爆压力下,土壤最大裂隙宽为3~4 mm、裂隙扰动半径约为400 mm,液肥均匀扩散到这些裂隙中。陈相安等[36]设计了一款以高压气流松土引导肥液扩散的果园注肥机,注肥装置设计为气、肥通道嵌套形式,一次下压入土,完成气爆松土、注肥两个过程,互不干涉,见图10(b)。通过试验确定了通气压力0.8 MPa,注肥压力1.5 MPa为最佳参数。液肥纵向、横向扩散范围分别为264~320 mm、250~270 mm,作业效率为0.10~0.12 hm2/h。Sliva等[37]开发了一种液体肥料定点注射系统,将钻孔与注肥相结合,能够连续定点定量注入液体肥料。沈从举等[38]研制了履带式果园气爆深松施肥机,能够完成果树根部土壤定点打穴、气爆松土和固体肥定量施肥等施肥工序,见图10(c)。试验结果表明,当打穴深度600 mm、施肥杆内径30 mm、气爆压力0.6 MPa时,单次作业时间为22.1 s,肥料扩散半径为413.6 mm,作业效果最佳。杨涛等[39]基于TRIZ理论设计了包括多连杆打穴破土机构、气爆发生装置和精量施肥装置的深松施肥机,见图10(d)。试验表明,在常见果园中作业气爆压力大于0.6 MPa,便能够得到较好的松土效果,同时保证颗粒肥料有效扩散。
2 存在问题
1) 果园精准施肥在排肥量控制方面,现有技术装备已经非常成熟,能够准确供给所需肥量。但多数只能施用单一种类的肥料,仅有少数能够同时独立控制氮磷钾等养分肥料供给,难以满足果树对多种养分的差异化需求,无法针对单棵果树实现个性化按需配肥施用。
2) 在施肥位置精准控制方面,由大面积粗放施肥向定点精准施肥发展,只在需肥位置施用。但定点施肥多处于研究阶段,实际应用较少,且作业参数多不能智能调节。无法适应复杂多样的土壤环境,容易造成肥料在土壤中分布不均匀。根据果树根系分布实现肥料精准分布也难以实现。
3) 目前的精准施肥多依据经验模型,缺少科学的、基于果树生长规律的施肥处方决策模型,导致施肥量和施肥位置不合理,肥效无法充分发挥。
3 发展趋势
1) 果园精准施肥在排肥量控制方面,一是向研发排肥均匀性、肥料种类适应性更好的排肥器方向发展,二是向基于排肥监测、故障报警、故障自动排除等的智能控制方向发展,另外也在由控制氮磷钾复合肥總量向控制单一养分肥料方向发展。
2) 在施肥位置精准控制方面,由开沟施肥向易于控制施肥位置的定点施肥方向发展,由大面积粗放式施肥向基于果树根系分布的精准施肥方向发展。
4 对策建议
1) 在政策层面应该加强精准施肥装备补贴力度,使果农用得起;在应用层面应该根据不同区域的果园特点,推广适用的精准施肥装备,并扩大宣传、培训力度,使果农信得过、用得会。
2) 在技术层面一要降低装备成本,提高作业效率;二要突破基于根系分布的定点施肥技术,提高精准施肥装备性能;三要加大智能施肥决策模型的研究,让果园精准施肥有策可依,从源头提高肥料利用率。
参 考 文 献
[1]刘凤之, 王海波, 胡成志. 我国主要果树产业现状及“十四五”发展对策[J]. 中国果树, 2021(1): 1-5.Liu Fengzhi, Wang Haibo, Hu Chengzhi. Current situation of main fruit tree industry in China and its development countermeasure during the “14th five-year plan” period [J]. China Fruits, 2021(1): 1-5.
[2]朱德兰, 阮汉铖, 吴普特, 等. 水肥一体机肥液电导率远程模糊PID控制策略[J]. 农业机械学报, 2022, 53(1): 186-191.Zhu Delan, Ruan Hancheng, Wu Pute, et al. Strategy on remote fuzzy PID control for fertilizer liquid conductivity of water fertilizer integrated machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(1): 186-191.
[3]Yamin M, Ismail W I W, Aziz S A, et al. Design considerations of variable rate liquid fertilizer applicator for mature oil palm trees [J]. Precision Agriculture, 2022, 23: 1413-1448.
[4]袁全春, 徐丽明, 牛丛, 等. 果园有机肥深施机分层变量排肥控制系统设计与试验[J]. 农业机械学报, 2020, 51(S1): 195-202.Yuan Quanchun, Xu Liming, Niu Cong, et al. Design and test of layered variable rate fertilizer discharge control system for organic fertilizer deep applicator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 195-202.
[5]杨文武, 方龙羽, 罗锡文, 等. 螺旋排肥器排肥口参数对排肥性能影响的试验研究[J]. 农业工程学报, 2020, 36(17): 1-8.Yang Wenwu, Fang Longyu, Luo Xiwen, et al. Experimental study of the effects of discharge port parameters on the fertilizing performance for fertilizer distribution apparatus with screw [J]. Transactions of the Chinese Society for Agricultural Engineering, 2020, 36(17): 1-8.
[6]顿国强, 吴星澎, 纪欣鑫, 等. 斜口螺旋精控排肥器优化设计与试验[J]. 农业机械学报, 2023, 54(7): 167-174.Dun Guoqiang, Wu Xingpeng, Ji Xinxin, et al. Optimization design and experiment of oblique opening spiral precision control fertilizer apparatus [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(7): 167-174.
[7]顿国强, 刘文辉, 杜佳兴, 等. 弧槽双螺旋式排肥器优化设计与试验[J]. 农业机械学报, 2022, 53(10): 118-125.Dun Guoqiang, Liu Wenhui, Du Jiaxing, et al. Optimal design and experiment ofarc-groove double-spiral fertilizer discharge device [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 118-125.
[8]杨欣伦, 王加一, 杨健, 等. 开沟施肥机叠片式排肥量调节装置设计与试验[J]. 中国农机化学报, 2023, 44(5): 26-34.Yang Xinlun, Wang Jiayi, Yang Jian, et al. Design and test of stacking type fertilizer discharge adjusting device for ditching fertilizer applicator [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(5): 26-34.
[9]刘彩玲, 张福印, 都鑫, 等. 水平涡轮叶片式精量排肥器设计与试验[J]. 农业机械学报, 2020, 51(S1): 165-174.Liu Cailing, Zhang Fuyin, Du Xin, et al. Design and experiment of precision fertilizer distribution mechanism with horizontal turbine blades [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 165-174.
[10]白秋薇, 张信, 罗红品, 等. 设施果园自动对靶精准变量施肥控制系统[J]. 农业工程学报, 2021, 37(12): 28-35.Bai Qiuwei, Zhang Xin, Luo Hongpin, et al. Control system for auto-targeting precision variable-rate fertilization of fruit trees in a greenhouse orchard [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(12): 28-35.
[11]劉莫尘, 赵庆吉, 韩守强, 等. 桑园自走式变比配肥定向撒肥机设计与试验[J]. 农业机械学报, 2022, 53(S2): 120-130.Liu Mochen, Zhao Qingji, Han Shouqiang, et al. Development and test of self-walking mulberry garden integrated machine with variable proportion and directional disperse fertilization [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(S2): 120-130.
[12]闫银发, 赵庆吉, 王瑞雪, 等. 四槽轮配肥器肥料颗粒碰撞掺混离散元分析与优化设计[J]. 农业机械学报, 2023, 54(3): 49-59.Yan Yinfa, Zhao Qingji, Wang Ruixue, et al. Discrete element analysis and optimization design of collision blending for four flute-wheels fertilizer [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(3): 49-59.
[13]周利明, 马明, 苑严伟, 等. 基于电容法的施肥量检测系统设计与试验[J]. 农业工程学报, 2017, 33(24): 44-51.Zhou Liming, Ma Ming, Yuan Yanwei, et al. Design and test of fertilizer mass monitoring system based on capacitance method [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(24): 44-51.
[14]贾洪雷, 温翔宇, 王刚, 等. 颗粒肥料质量流量传感器设计与试验[J]. 农业机械学报, 2020, 51(S1): 130-136.Jia Honglei, Wen Xiangyu, Wang Gang, et al. Design and experiment of mass flow sensor for granular fertilizer [J]. Transactions of the Chinese Society of Agricultural Machinery, 2020, 51(S1): 130-136.
[15]杨立伟, 赵礼豪, 张俊宁, 等. 基于微波传感的颗粒肥料质量流量测量方法[J]. 农业机械学报, 2023, 54(S2): 323-329.Yang Liwei, Zhao Lihao, Zhang Junning, et al. Particle fertilizer mass flow measurement based on microwave method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(S2): 323-329.
[16]楊立伟, 黄家运, 张季琴, 等. 基于微波多普勒法的施肥质量流量检测系统研究[J]. 农业机械学报, 2020, 51(S1): 210-217.Yang Liwei, Huang Jiayun, Zhang Jiqin, et al. Mass flow measurement system of granular fertilizer based on microwave doppler method [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 210-217.
[17]Yin J J, Zhao Z, Lei C P, et al. Yang. Improved optical-type measurement method of grain flow using array near-infrared photoelectric sensors [J]. Computers and Electronics in Agriculture, 2021, 183: 106075.
[18]姜萌, 刘彩玲, 都鑫, 等. 基于光量阻挡原理的颗粒化肥流量检测方法[J]. 农业机械学报, 2022, 53(S2): 91-99.Jiang Meng, Liu Cailing, Du Xin, et al. Flow detection mechanism of granular fertilizer based on light blocking principle [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(S2): 91-99.
[19]Zhao J L, Wang X J, Tian H L, et al. A fertilizer discharge detection system based on point cloud data and an efficient volume conversion algorithm [J]. Computers and Electronics in Agriculture, 2021, 185: 106131.
[20]翟长远, 杨硕, 张波, 等. 支持故障报警的果园对靶变量排肥系统[J]. 农业机械学报, 2015, 46(10): 16-23.Zhai Changyuan, Yang Shuo, Zhang Bo, et al. Orchard toward-target variable-rate fertilizer system supporting fault alarming [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(10): 16-23.
[21]陈远玲, 侯怡, 李尚平, 等. 基于PSO-BP的甘蔗施肥监控系统设计与试验[J]. 农业工程学报, 2022, 38(22): 23-31.Chen Yuanling, Hou Yi, Li Shangping, et al. Design and experiments of the fertilization monitoring system based on the PSO-BP for sugarcane [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(22): 23-31.
[22]肖宏儒, 赵映, 丁文芹, 等. 1KS60-35X型果园双螺旋开沟施肥机刀轴设计与试验[J]. 农业工程学报, 2017, 33(10): 32-39.Xiao Hongru, Zhao Ying, Ding Wenqin, et al. Design and experiment on blade shaft of 1KS60-35X type orchard double-helix trenching and fertilization machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(10): 32-39.
[23]朱新华, 李洪春, 李旭东, 等. 果园有机肥机械化环沟施肥方法及其实现[J]. 农业工程学报, 2023, 39(17): 60-70.Zhu Xinhua, Li Hongchun, Li Xudong, et al. Mechanized ring-furrow fertilization of organic fertilizers in orchards [J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(17): 60-70.
[24]张宏建, 徐春保, 刘双喜, 等. 自动调节深度式果园双行开沟施肥机设计与试验[J]. 农业机械学报, 2021, 52(1): 62-71.Zhang Hongjian, Xu Chunbao, Liu Shuangxi, et al. Design and experiment of orchard double row ditching-fertilizer machine with automatic depth adjustment [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 62-71.
[25]袁全春, 徐麗明, 牛丛, 等. 果园有机肥深施机土肥混合分层回填装置研制[J]. 农业工程学报, 2021, 37(5): 11-19.Yuan Quanchun, Xu Liming, Niu Cong, et al. Development of soil-fertilizer mixing layered backfiller for organic fertilizer deep applicator in orchard [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(5): 11-19.
[26]Yuan Q C, Xu L M, Ma S, et al. The effect of paddle configurations on particle mixing in a soil-fertilizer continuous mixing device [J]. Powder Technology, 2021, 391: 292-300.
[27]Yang S, Zhai C Y, Long J, et al. Wolfberry tree dual-model detection method and orchard target-oriented fertilization system based on photoelectric sensors [J]. Int J Agric & Biol Eng, 2018, 11(4): 65-73.
[28]杨洲, 欧治武, 孙健峰, 等. 基于香蕉根系分布特征的变量施肥机研制[J]. 农业工程学报, 2020, 36(8): 1-10.Yang Zhou, Ou Zhiwu, Sun Jianfeng, et al. Development of variable rate fertilizer applicator based on distribution characteristics of banana roots [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(8): 1-10.
[29]宋帅帅, 段洁利, 邹湘军, 等. 基于香蕉根系分布形态的变量排肥器参数优化与试验[J]. 农业工程学报, 2020, 36(6): 11-18.Song Shuaishuai, Duan Jieli, Zou Xiangjun, et al. Parameter optimization and test of variable fertilizer apparatus based on root distribution pattern of bananas [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(6): 11-18.
[30]仝敏. 苹果园精准施肥控制系统设计[D]. 杨凌: 西北农林科技大学, 2019.Tong Min. Design of precise fertilization control system in apple orchard [D]. Yangling: Northwest A & F University, 2019.
[31]Chang Y K, Zaman Q U, Farooque A, et al. Sensing and control system for spot-application of granular fertilizer in wild blueberry field [J]. Precision Agriculture, 2017, 18: 210-223.
[32]苑進, 尹然光, 刘功, 等. 原位混肥挖坑回填复式果树栽植机设计与试验[J]. 农业机械学报, 2021, 52(2): 110-121.Yuan Jin, Yin Ranguang, Liu Gong, et al. Design and experiment of in-situ fertilizer mixing integrated digging and backfilling planter for fruit tree [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(2): 110-121.
[33]巴利珍. 果园施肥挖坑机的设计与试验[D]. 晋中: 山西农业大学, 2022.Ba Lizhen. Design and test of orchard fertilizing digger [D].Jinzhong: Shanxi Agricultural University, 2022.
[34]吕晓兰, 雷哓晖, 张美娜, 等. 一种果树精准施肥装置及方法[P]. 中国专利: ZL202010847840.7, 2022-03-04.
[35]奚小波, 张瑞宏, 单翔, 等. 3SFBQ-500型果园气爆松土注肥机的优化设计与试验[J]. 农业工程学报, 2017, 33(24): 35-43.Xi Xiaobo, Zhang Ruihong, Shan Xiang, et al. Optimal design and experiment of 3SFBQ-500 type orchard gas explosion subsoiling and fertilizer injection machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(24): 35-43.
[36]陈相安, 张学敏, 侯秀宁, 等. 气流引导式果园注肥机设计与试验[J]. 农业机械学报, 2022, 53(10): 108-117.Chen Xiangan, Zhang Xuemin, Hou Xiuning, et al. Design and test of air guided orchard fertilizer injection machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 108-117.
[37]Silva M, Franco H, Magalhaes P. Liquid fertilizer application to ratoon cane using a soil punching method [J]. Soil Tillage Research, 2017, 165: 279-285.
[38]沈从举, 贾首星, 张立新, 等. 履带自走式果园气爆深松施肥机研制[J]. 农业工程学报, 2019, 35(17): 1-11.Shen Congju, Jia Shouxing, Zhang Lixin, et al. Development of caterpillar self-propelled orchard gas explosion subsoiling and fertilizer machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(17): 1-11.
[39]杨涛, 凌宁, 李晓晓, 等. 基于TRIZ理论的果树深松施肥机创新设计[J]. 中国农机化学报, 2023, 44(10):65-71.Yang Tao, Ling Ning, Li Xiaoxiao, et al. Innovative design of fruit tree deep loosening fertilizer applicator based on TRIZ theory [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(10): 65-71.
基金项目:国家重点研发计划(2022YFD2001400);国家梨产业技术体系(CARS—28—21);江苏省农业自主创新资金项目(CX(23)3037)
第一作者:袁全春,男,1993年生,山东临沂人,博士,助理研究员;研究方向为果园养分智能诊断与精准施肥装备。E-mail: yuanquanchun@jaas.ac.cn
通讯作者:吕晓兰,女,1980年生,山东潍坊人,博士,研究员;研究方向为果园植保机械与施药技术。E-mail: lanny@126.com
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:12
今日农业(2022年16期)2022-09-22 05:38:48
快乐语文(2021年27期)2021-11-24 01:29:16
阅读(低年级)(2019年9期)2019-11-15 11:07:53
四川农业与农机(2019年4期)2019-08-29 06:06:06
小学生作文(低年级适用)(2017年9期)2017-10-13 08:04:27
四川农业与农机(2017年1期)2017-04-17 12:06:45
工业设计(2016年7期)2016-05-04 04:02:20
工业设计(2016年4期)2016-05-04 04:00:25
创新作文(小学版)(2016年25期)2016-02-28 18:23:50