应用于不良目视环境的直升机视景系统分析
2024-04-19 04:47:24杜向辉汤志慧
电光与控制 2024年4期
杜向辉, 刘 凯, 汤志慧, 严 飞
(1.海军装备部,武汉 430000; 2.光电控制技术重点实验室,河南 洛阳 471000; 3.中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471000; 4.空军装备部驻洛阳地区第二军事代表室,河南 洛阳 471000)
0 引言
直升机具有垂直起降、空中悬停、贴地飞行、多方向起飞着陆等特点,与地面作战平台相比,在快速反应、兵力与火力机动、信息攻防等方面优势明显,是未来信息化战场上低空体系作战的重要组成部分。不良目视环境(Degraded Vision Environments,DVE)是指雨、雪、云、雾、霾、沙尘、黑夜等持续性环境下和进近着陆时因直升机旋翼高速转动造成的“灰视”(砂砾引起)和“白视”(积雪引起)等诱发性环境[1]。
直升机在这些不良目视环境下的起飞、低空飞行、进近着陆等过程中,飞行员视力受到严重限制,难以对外界环境进行观察,易导致事故发生,从而严重影响超低空作战能力。
2010年,美军将2001~2009年间发生的直升机飞行事故原因进行了统计[2],其中因不良目视环境(DVE)造成的事故占38%,是最主要的事故原因。
为解决不良目视环境下的安全问题,国外提出了一系列的视景系统解决方案,帮助飞行员重新获得对外界环境的感知能力。对此,本文主要介绍不良目视环境的视景系统的发展和研究热点,并对视景系统的能力等级进行了研究,说明了不同等级视景系统的原理、优势及问题。
1 不良目视环境下视景系统的发展
飞行员在不良目视环境下视力受限时,造成事故的原因主要有:1) 直升机常常在沙漠、山地、高原、湖泊、森林等复杂地形中使用,同时进近着陆过程中,会遇到树木、烟囱、房子、高压线及电线杆等障碍物,飞行员面对外界复杂、陌生环境,缺乏视觉感知,导致撞击事故发生;2) 直升机自身是不稳定的,飞行员需要参照外界进行持续性控制输入,时刻监视直升机的状态,如姿态、横向/纵向速度以及加速度等,但不良目视环境下,飞行员会因为失去视觉参照物而产生“空间定向障碍”问题,无法感知飞机位移偏移,导致撞地事故发生。
针对以上问题,国外对直升机不良目视环境下的应对方法进行了研究,并开发了相关的系统,见表1,其中,黄色为已试飞验证。
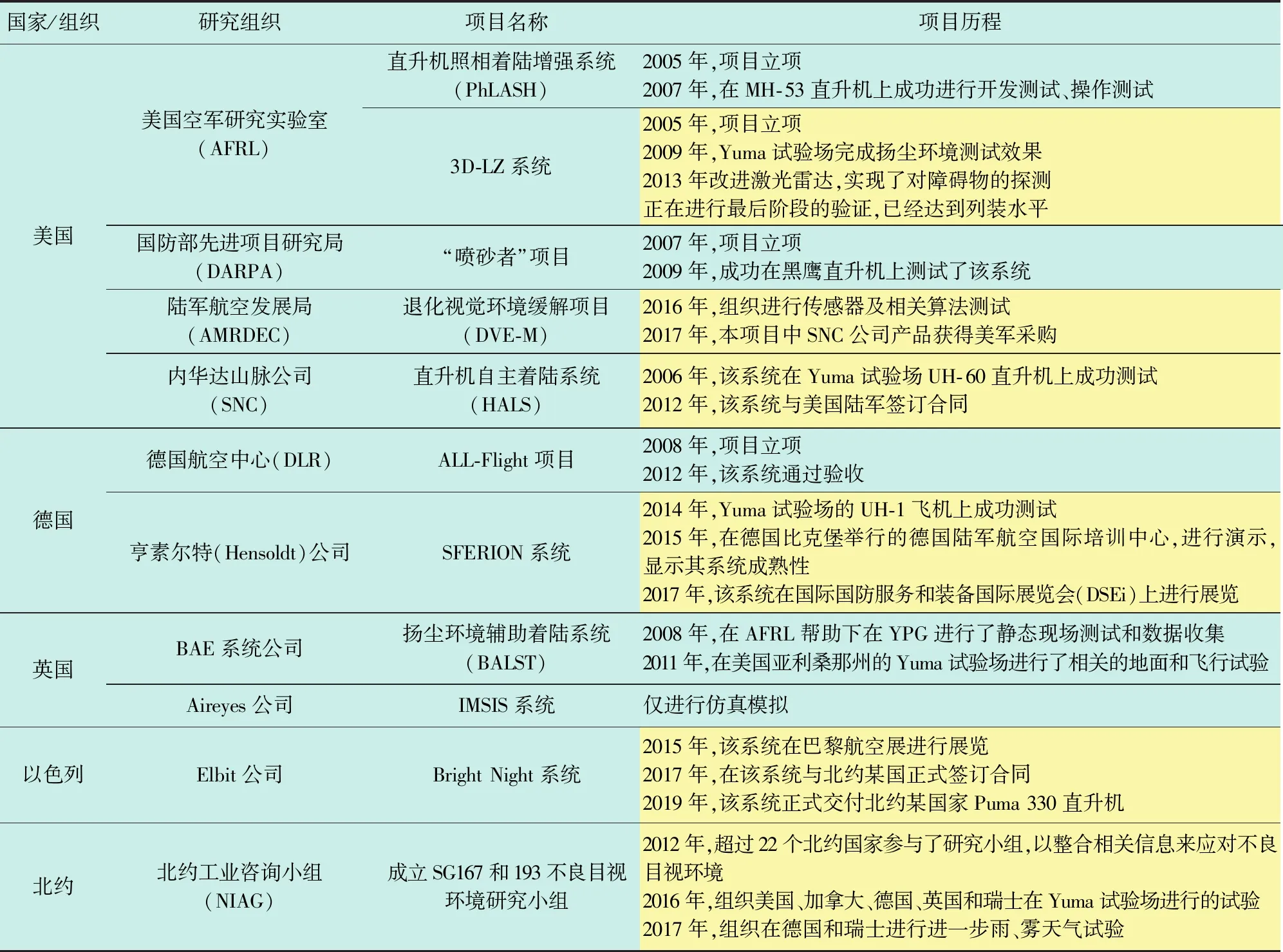
表1 针对不良目视环境的相关研究项目
2012年,北约工业咨询小组(NIAG)针对不良目视环境问题正式成立SG(Study Group)-167小组(负责不良目视环境下相关系统试验及测试)和SG-193小组(负责不良目视环境下适航性标准研究)[3],其目的是将来自多个国家的各种系统整合在一起,在相似条件下进行测试,以探索技术并确定系统的有效性,后续在相关场景下组织了一系列试验。
国外不良目视环境下的视景系统主要由数据源端(传感器及数字地图数据)、数据处理端(导航信息、数字地图信息和传感器信息融合)和显示端(显示方式及设备)组成,视景系统由数据源端提供不同特点的数据,处理端进行融合并生成最终的态势画面,显示端进行最终呈现。其研究主要集中在传感器、数据融合及人机接口3方面:1) 传感器方面,主要指微光相机、红外相机、毫米波雷达、激光雷达等能够在不良目视环境下进行探测、穿透的传感器;2) 数据融合方面,主要指对各种传感器数据、机载数字地图、障碍物数据库、导航信息等进行多源融合研究,生成不良目视环境下的完整态势图;3) 人机接口方面,主要指依据融合后的态势图,针对不同显示终端设计显示方式,使飞行员能够高效地获取目视参照和障碍物提醒,减轻飞行员认知负荷。
这3方面的研究紧密结合,更先进的传感器往往会对数据融合提出新的要求,并带来人机接口显示的升级,从而使视景系统的能力得到进一步提升。
2 不良目视环境下视景系统的能力分析
国外针对不良目视问题开发的视景系统中,有些使用传感器较少,解决了一般的不良目视环境,例如夜晚、薄雾等环境,有些系统采用多种传感器相配合,并融合了地形及障碍物数据库,可以达到应对绝大部分环境的水平。总的来说,解决不良目视环境问题的视景系统可以划分为4级(Class1~Class4)[4],如图1所示。
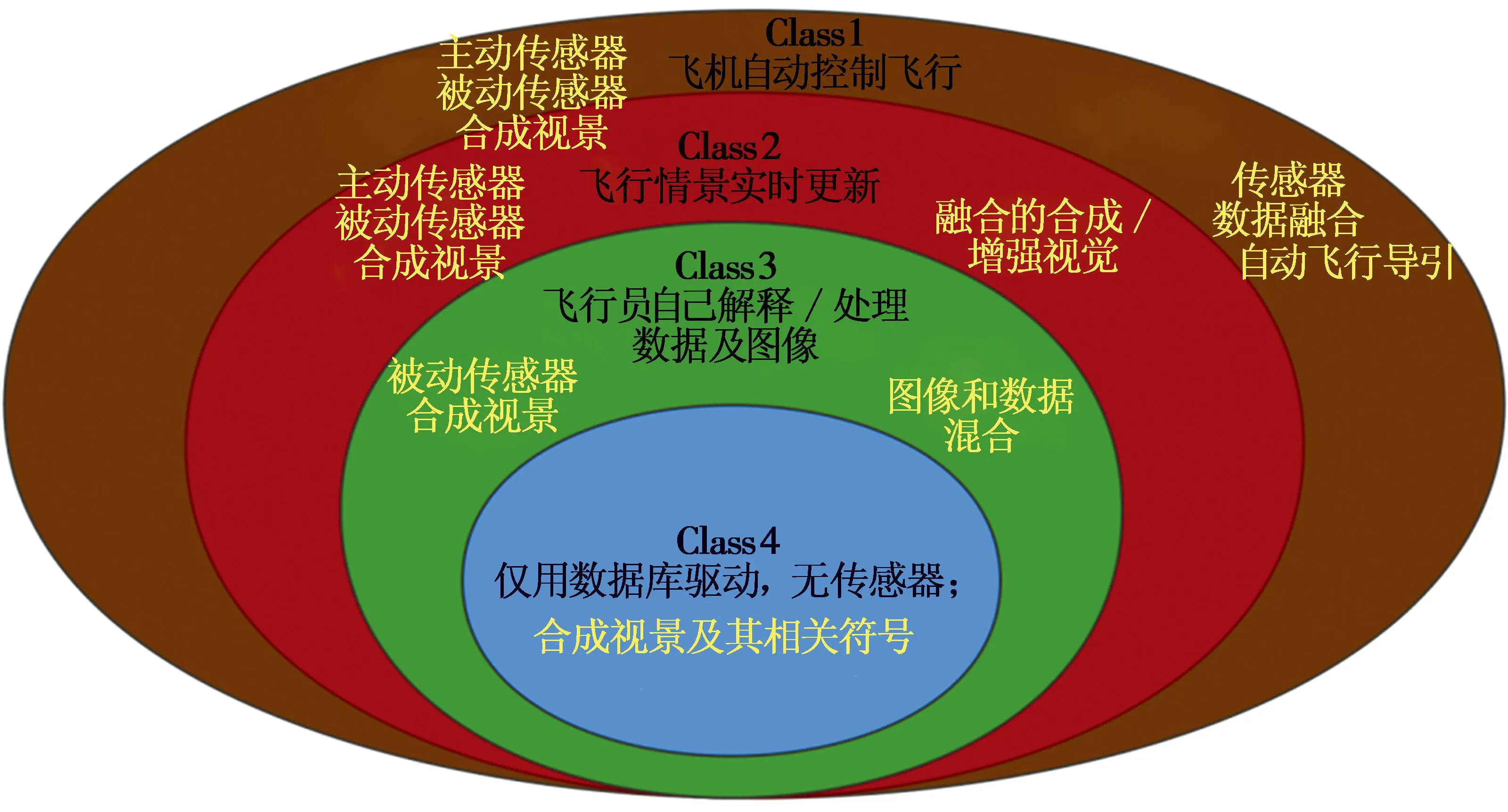
图1 解决不良目视环境问题的视景系统等级划分
2.1 第4级视景系统
第4级视景系统是指仅仅由数据库驱动的视景系统,例如合成视景系统(SVS)。其不具有前视传感器,通过将导航信息和数据库信息结合,生成所需的外视景图像,同时,借助数据库的三维数据源,生成三维符号为飞行员提供空间感知能力,避免飞行员在不良目视环境下产生的“空间定向障碍”问题,二维符号与三维符号显示效果对比如图2[5]所示。

图2 二维符号与三维符号显示效果对比
第4级视景系统是架构最简单的视景系统,其优势在于成本低、且在所有的不良目视环境下都有效,但其存在以下问题:
1) 配准误差。每个数据库在制作时都具有一定精度误差,同时导航系统也会有一定的不精确和漂移问题,这些误差会导致生成的视景、三维符号与外界真实环境不匹配。
2) 数据库时效性。地形数据库和障碍物数据库通常需要几年更新一次,这期间往往会有新的高压线塔、高压线等障碍物产生,降低了视景系统的可靠性。
3) 分辨率。地形数据库和障碍物数据库以离散点的形式存储(通常精度为几十米),离散点间信息缺失,导致视景系统的分辨率低。
依靠数据库驱动的第4级视景系统使飞行员对外界环境具备粗略感知能力,但在起飞、超低空飞行、进近着陆等精细化感知阶段不可靠。
第4级视景系统功能架构,如图3所示。
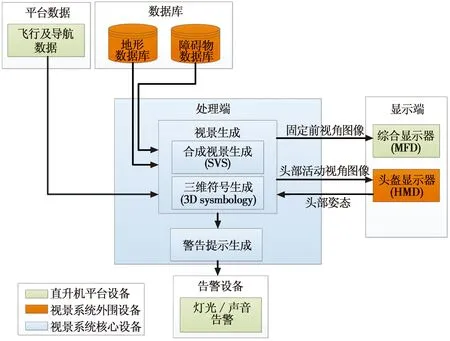
图3 第4级视景系统功能架构
2.2 第3级视景系统
第3级视景系统是在第4级视景系统的基础上增加了被动传感器,如可见光、微光和前视红外等,并将数据库和传感器图像融合,类似增强合成视景系统(ESVS)。第3级系统的优势是既能够实时感知外界真实环境(特别是夜间),又能够利用合成视景大范围、预渲染的优势,弥补了增强视景外的环境信息,为飞行员提供更精细的环境感知能力,但存在以下问题:1) 融合误差。被动传感器为实时探测,而合成视景生成的虚拟视景存在误差,融合图像存在障碍物、地形的偏移和重影,造成视觉混乱,特别是低空飞行时更明显。2) 恶劣不良目视环境受限。前视红外在浓雾环境中受大气衰减影响,在雨雪、沙尘气象条件下,物体所辐射一部分能量会被遮挡或吸收,导致成像质量受影响[1]。3) 缺乏三维探测信息。被动传感器能够提供二维纹理信息,但缺乏实时探测的空间距离信息,难以向飞行员提供可靠的空间感知能力。
第3级视景系统能够在部分不良目视环境下(如黑夜、轻雾等),辅助飞行员完成起飞、超低空飞行、进近着陆等任务,但遇到恶劣气象条件、复杂环境时(如沙尘、浓雾、暴雨雪等),难以引导飞行员完成任务。
第3级视景系统功能架构,如图4所示。

图4 第3级视景系统功能架构
2.3 第2级视景系统
第2级视景系统是在第3级系统的基础上,增加了三维主动传感器,主要包含激光雷达、毫米波雷达等,并对异源传感器信息进行融合,为飞行员提供完整、实时的三维环境感知能力。第二级系统优点如下。
1) 通过多传感器互补、融合,能够解决大部分不良目视环境下的感知问题,例如激光雷达具有全天时、高精度、高分辨率、三维探测的优点,能够探测到高压线和其他小型障碍物,但在大粒子气象条件下,性能会严重衰减[6];毫米波雷达具有全天候(极好的灰尘和烟雾穿透能力)、全天时、三维探测的优点,但其较大的波束宽度导致空间分辨率较低。通过多传感器融合,优势互补,达到稳定可靠的环境感知能力。
2) 能够提供实时、精确、高分辨率的三维感知能力,解决了基于数据库视景系统的偏移、时效性和低分辨率问题,确保了空间态势感知和增强现实三维符号的可靠性。同时,实时探测的三维信息,能够结合导航数据更新、修正数据库,从而即使在三维主动传感器失效的情况下,也能提供更加可靠的合成视景。
第2级视景系统集成了丰富的传感器,使视景系统的能力进一步提升,但其应用存在以下难点:
1) 系统集成。传感器集成极多,而直升机空间有限,对视景系统的尺寸、重量和功耗(SWAP)提出了极高要求。
2) 多源传感器融合。直升机为动平台,对实时性敏感,同时机载设备性能有限,融合算法的实时性、准确性是一项挑战。
第2级视景系统功能架构,如图5所示。
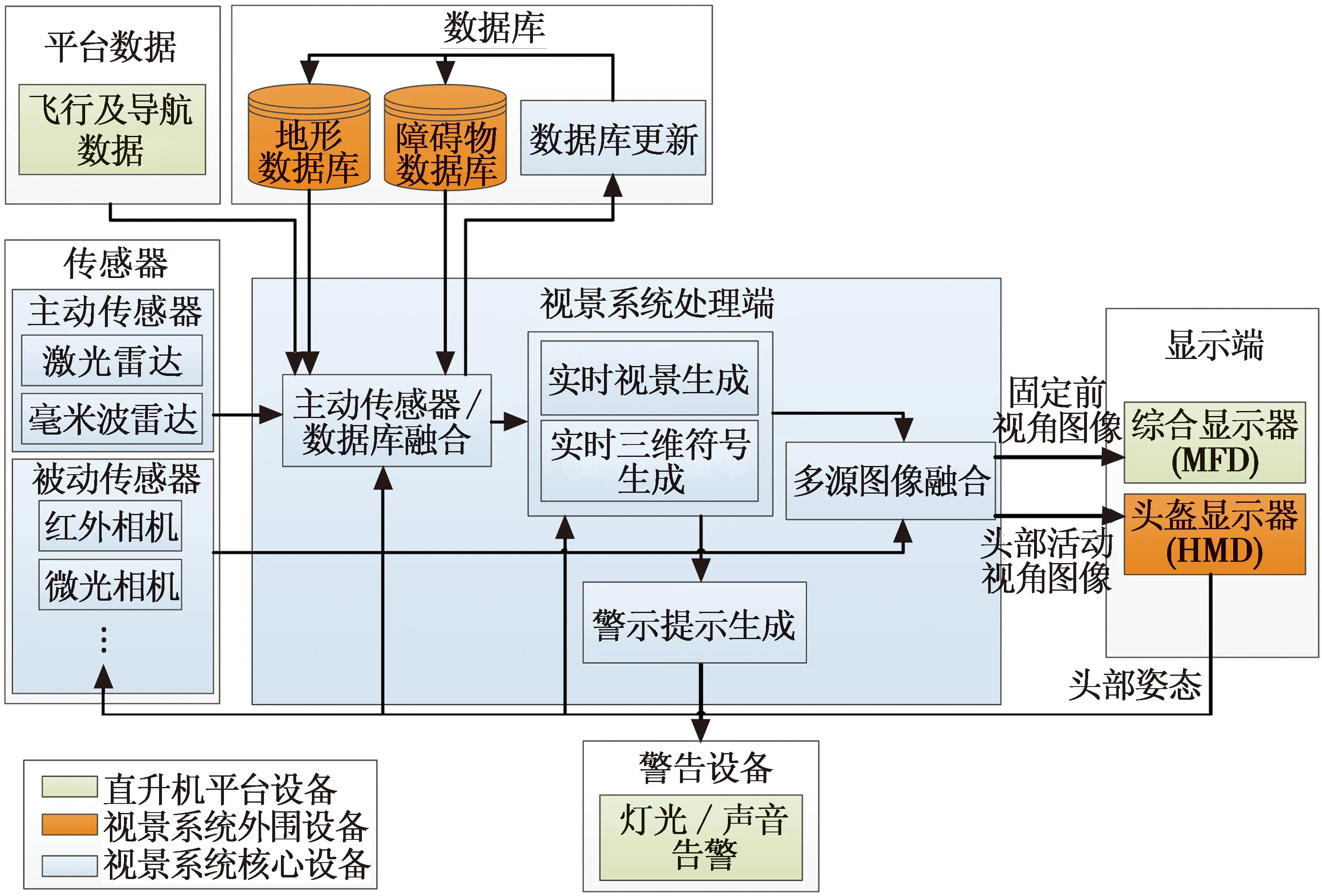
图5 第2级视景系统功能架构
2.4 第1级视景系统
第1级视景系统是在第2级视景系统的基础上,增加了飞行规划及控制模块,将合成视景、被动传感器和主动传感器融合后提供的感知信息作为输入,规划模块依据感知信息给出安全航行轨迹,并由控制模块执行规划的航迹,实现直升机在不良目视环境下全阶段的自动飞行引导。但其有以下难点:1) 多传感器感知的可靠性。部分极端天气场景下,传感器探测受影响,出现探测信息过少和不同传感器探测信息互斥的情况,引发环境理解不正确,导致自动飞行引导错误。2) 海量信息的实时融合、决策。视景系统要接收和处理直升机当前场景下的所有信息,包含传感器感知信息、飞行信息、数据库信息等,需要在有限算力的机载设备下,对不同模态、不同来源、不同格式的庞大信息实时筛选、融合,并准确决策规划,这对于算法的设计来说是一项极大挑战[7]。
第1级视景系统是最理想的视景系统,但其问题在于系统过于复杂,难以保证自动飞行引导的高可靠性和安全性。因此,NIAG报告指出,第2级视景系统在当前技术条件下最有希望解决直升机在不良目视环境下的飞行安全问题[1]。
第1级视景系统功能架构,如图6所示。
3 国内研究现状
在国内,相关单位也开展了直升机视景系统的研究,文献[8]基于高分数据的合成视景辅助导航方面的研究,完成了系统演示;文献[9]通过模拟仿真微光、前视红外、毫米波雷达及激光雷达等传感器,开展了直升机不良目视环境下的多传感器融合及视景生成方面的研究。
除此之外,还有机构研发了机载视景增强系统样机,通过融合微光、红外等传感器图像及合成视景图像,叠加显示于平视显示器(HUD)上,从而提升飞机在夜间、低能见度条件下的起飞、进近及着落阶段的安全性。
4 结束语
自北约在2016~2017年组织沙尘、雨雪环境测试后,又在2020年开展了新一轮不良目视环境视景系统全气候、全阶段避障试验[10],同时,美军指出要将不良目视环境下的视景系统从飞行安全能力转为战场威慑能力,实现全天候任务执行,从而形成战场优势,因此,不良目视环境下的视景系统重要性也愈发突出[11]。
本文对不良目视环境下视景系统的起因、发展和研究热点进行了梳理,并对不良目视环境下视景系统能力进行了研究,分析了不同等级视景系统的原理、优势和难点,对国内不良目视环境下视景系统的研制具备一定参考价值。
猜你喜欢
小哥白尼(军事科学)(2021年7期)2021-11-20 06:14:48
军事文摘(2021年19期)2021-10-10 13:28:40
少林与太极(2021年1期)2021-06-20 14:59:43
意林·全彩Color(2019年4期)2019-05-11 09:07:26
健身气功(2019年2期)2019-04-18 16:22:22
电子测试(2018年4期)2018-05-09 07:28:19
网络文学评论(2017年1期)2017-07-22 05:36:30
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30 08:09:31
舰船科学技术(2015年8期)2015-02-27 15:38:41
河北能源职业技术学院学报(2015年3期)2015-02-27 13:32:12