基于人体工程的多功能智能坐式沐浴装置设计
2024-04-18 01:38:36唐黔湘王亦可陈文科何童彤
装备制造技术 2024年2期
陈 静,唐黔湘,王亦可,彭 法,陈文科,何童彤
(湖南文理学院,湖南 常德 415000)
0 引言
在全球老龄化问题日益加剧的情况下,国内外提出了各类助老产品,辅助沐浴装置便是其中一类。其设计不仅要满足用户对产品的功能需求,还要求具有较高的性价比。到目前为止,国内外尚未有理想的沐浴装置,已经研发出来的产品多为卧式布局,需要两人以上使用,不适合单个老年人使用,且对沐浴者姿势约束大,体积也大,价格昂贵,不符合我国人口基数大、经济发展不平衡的国情,难以推广。基于上述原因,本文针对坐式沐浴装置的特点和沐浴过程的特定需求,尝试设计了一款基于人体工程学的多功能智能坐式沐浴装置,尤其适用于老年人,残疾人解决自主沐浴困难的问题。
1 坐式沐浴装置总体设计
1.1 坐式沐浴装置设计
设计的多功能智能坐式沐浴装置,包括S 形搓背机构、辅助坐立机构、辅助搓脚机构及智能控制系统,如图1 所示。S 形搓背机构,采用对心曲柄滑块,和直线导轨配合实现X、Y方向合成S 形搓背运动轨迹,实现辅助搓背功能;辅助坐立机构由铰链四杆机构与电动推杆配合,实现辅助坐、立功能;辅助搓脚机构,是指采用齿条棘轮机构,利用棘爪调节脚踏板的位置,同时配有搓脚刷,实现辅助老年人搓脚的功能;智能控制可实现自动控制铰链四杆机构。该装置还采用红外感应,实现沐浴液自动喷涂,且借鉴百叶窗提升机构原理、配合搓背机构,实现辅助背部净干功能。

图1 坐式沐浴装置总体结构
1.2 坐式沐浴的操作过程
坐式沐浴装置操作过程如下:启动沐浴装置,按下升降开关(或呼叫“小杰”便可自动调节装置高度),使沐浴人处于较为舒适的位置,再进行调温,达到沐浴最适温度,打开淋浴开关,初次清洗全身,关闭淋浴开关,通过红外感应喷涂洗发露和沐浴液,同时启动背部S 形机构搓背,实现深度清洗,再打开淋雨开关,进行清洗,直线往复运动进行脚部清洗,清洗完毕后,背部形机构和滚珠链传动机构进行背部净干,按动椅子升降开关,辅助老年人站立,沐浴完毕,关闭总电源。
1.3 自动淋浴机总体外形设计计算
随着年龄的增加,老年人的脊柱椎间盘会萎缩变薄,身高会降低。但生活条件的改善,使得我国的老年肥胖者渐渐增多。于是我们初步设定座椅承受重量为250 kg。根据对中国老年男性,老年女性的人体平均尺寸分析以及对老年人身体各部分尺寸资料归纳得出靠背宽度可设定为480 mm[1]。由于自动淋浴机增加了搓背,擦干的功能,淋浴椅靠背高度需要适当的增加,最终靠背高度设定为1100 mm,靠背角度95° 。通过参考图2,老年人手臂高度数值分析,知扶手高度略低于老年人手高度时舒适感最佳。最终设定扶手的高度为210 mm,扶手间距尺度为430 mm。综上所述,最终我们确定自动淋浴座椅的外形尺寸为:660 mm(长)× 830 mm(宽)× 1100 mm(高)。
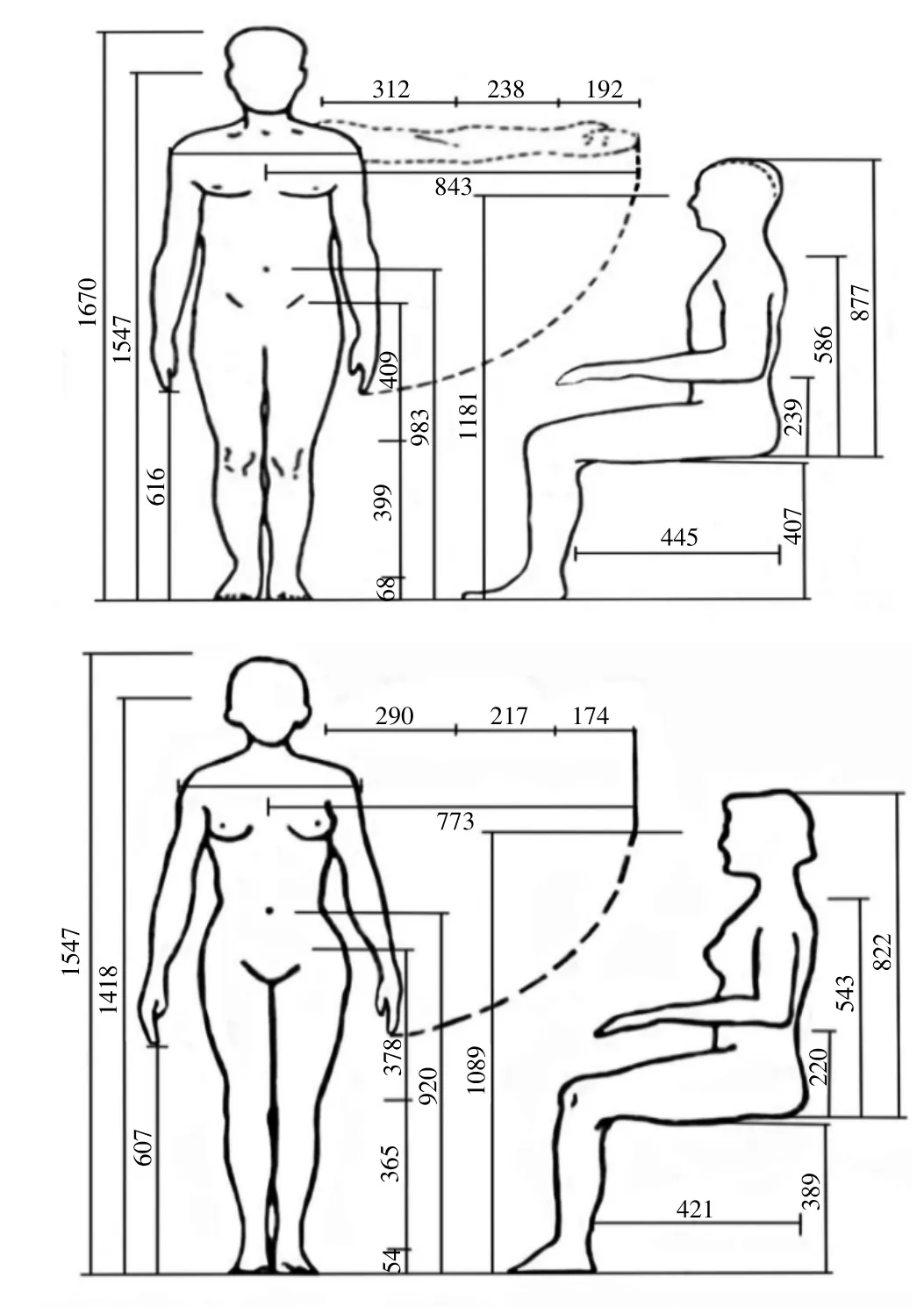
图2 中国老年男性和女性平均人体尺寸
2 主要机构设计
2.1 搓背机构的设计
以电机为动力源,通过曲柄和连杆将电机的动力传递至滑块,滑块带动搓背刷子移动,实现辅助搓背功能。利用对心曲柄滑块,和直线导轨配合实现X、Y方向合成S 形搓背运动轨迹。如图3 所示。
2.2 辅助坐立机构设计
图4 为辅助坐立机构初始位置和坐垫成75°示意图。机构以电机为动力源,通过电动推杆和铰链四杆机构相配合,将动力传至坐垫,坐垫以缓慢变化的角度上升直至成。老年人扶住装置上的把手坐下,坐垫缓慢下降直至水平,实现辅助沐浴者进行立、坐姿态的调整[2]。
2.3 脚部清洗机构设计
脚部清洗机构采用自行车手刹原理控制位移的进行和停止,使齿条棘轮机构可在直线运动中的任何位置锁死,实现辅助沐浴者自行清洗足部,具有较高的安全系数,如图5 所示。

图5 脚部清洗机构结构
3 控制系统
控制系统主要是基于STM32 单片机的推杆升降系统的主要程序设计。该程序使用了三个按键、超声波模块、语音模块,实现了对推杆升降的控制。程序的主要特点包括按键的定时器消抖和中断功能、串口与语音模块的通信以及超声波模块的距离检测。此外,还定义了不同模块的中断优先级,确保系统能够响应不同事件并按照要求执行。如图6 所示。

图6 控制系统流程
3.1 按键设计
按键是用户与系统互动的主要方式,因此需要考虑按键的稳定性和可靠性。在本设计中,按键采用了定时器消抖和中断功能。按键的中断优先级被设置为最高,以确保及时响应用户的输入。程序会监测按键状态,并根据按键的不同组合来控制推杆升降和暂停操作。例如,当按键1 被按下时,推杆升高;按键2 被按下时,推杆降低;按键3 被按下时,推杆停止。如图7 所示。
3.2 超声波模块的距离检测
超声波模块用于测量用户脚部距离并相应地控制推杆的升高以使产品达到令用户满意的高度。当用户距离其小于等于5 cm 时,系统将升高推杆,以调整坐姿,远离后则相应停止。其检测不依赖于定时器或中断,而是在主循环中定期执行,确保能够实时检测距离并控制推杆的运动。如图7 所示。
3.3 主循环
主循环中不断监测各个模块的状态,并根据条件执行相应的操作。当按键按下时,按键中断会优先执行相应操作;其次如果串口接收到数据,串口通信则会执行对应操作;最后当超声波模块检测到距离小于等于5 cm 时,系统也会相应地控制推杆。如图7 所示。
4 运动学分析与理论设计计算
4.1 搓背机构运动学分析
搓背机构我们采用的是对心式曲柄滑块结构。由电机驱动曲柄旋转,曲柄带动连杆滑块运动,滑块做直线运动,刷子相对滑块做直线运动,同时在背板的S 型凸轮里滑动,从而实现搓背动作。其运动简图如图8 所示。

图8 搓背机构运动简图
4.2 滑块的速度和曲柄转角的关系
根据三角函数几何定理,直角三角形特性[3],可知:
得S=R[1 - cosα] +λ(1 - cos2α)
式中,S为滑块行程(从下死点算起);α为曲柄转角,从下死点算起,与曲柄旋转方向相反者为正;R为曲柄半径(R= 215.5);L为连杆长度(当可调时取最短时数值)(L= 412.5);λ为连杆系数λ代表连杆系数且= λ,已知R= 215.5,L= 412.5,所以λ= 215.5/412.5 = 0.52。
将位移s对时间t求导数就可求得到滑块的速度v即:
所以:V= 0.105nR(sinα+λsin2α),滑块的速度V是随曲柄转角角度变化的。在α= 0 时V= 0,α角增大时V随之显著增大;但当α取75 ~90°时,V的变化很小,而数值最大。因此常常近似取曲柄转角α= 90°的滑块的速度当作最大速度。查阅资料了解到,在自动淋浴椅设计中,曲柄转一周搓背机构往复运动次。搓背机构每分钟需要往复10 次。所以曲柄转数n= 10 r/mm,搓背机构最大运动速度用Vmax的算式为:
5 实物研制与试验
根据以上设计,制作了物理样机如图10 和图11所示。

图10 样机正面

图11 样机侧面
该样机通过实验,实现了本文设计的多功能智能坐式沐浴装置的设计要求,在实际测试中具有较高的可靠性与一定的适应性,解决了老人弯腰困难、搓背困难、蹲厕困难、长期站立困难等主要问题,同时也解决了现有产品体积大、难以移动、操作复杂、价格昂贵等缺点问题。并且该设备体型适当,功能强大,价格便宜、使用方便,适合居家老人以及一般人群,因此具有很广泛的应用前景。
6 结语
本研究设计了一款多功能坐式沐浴装置,整个装置结构简单,易于制造和使用。采用智能控制系统,利用曲柄滑块机构解决了搓背难的问题,选用推杆、四连杆机构实现使用者坐姿的调整,站立的辅助。制作出物理样机并进行实际实验,最终能完成辅助沐浴的整个过程,具有安全便利,功能强大,性价比高的特点。
猜你喜欢
机械工程师(2021年4期)2021-04-19 07:27:56
湖北体育科技(2020年4期)2020-06-13 06:08:46
设备管理与维修(2019年22期)2019-12-19 01:30:12
设备管理与维修(2018年15期)2018-11-08 06:14:50
机械研究与应用(2018年5期)2018-11-05 05:59:38
设备管理与维修(2018年8期)2018-08-13 12:09:14
中国核电(2017年1期)2017-05-17 06:10:00
当代体育科技(2014年4期)2014-12-05 16:42:26
河南科技(2014年6期)2014-02-27 14:06:47
文体用品与科技(2013年5期)2013-09-26 02:00:14