
储油罐检测机器人性能综合评价
2024-04-17 09:12:12王子同张树忠曾钦达郑耿峰陈浩龙
机床与液压 2024年5期
王子同,张树忠,曾钦达,,郑耿峰,陈浩龙
(1.福建工程学院机械与汽车工程学院,福建福州 350108;2.福建省特种设备检验研究院,福建福州 350008;3.福建省特种智能装备安全与测控重点实验室,福建福州 350008)
0 前言
大型储油罐作为国家战略原油储备的重要设备,在长期储存原油等石化产品后罐体内壁会被腐蚀[1]。储罐检测机器人能对在役储罐的缺陷进行检查,这极大节省了时间、成本,降低了人员风险[2- 3]。为确保在恶劣的工作环境下安全、高效地完成检测任务并实现相关机器人的测试与改进,对储罐检测机器人的性能进行综合评价就变得十分重要。目前,已有其他类型的机器人评价参考。张军等人[4]运用熵权法改进的模糊层次分析法对全向移动机器人性能做了综合评估;胡卫建等[5]为废墟搜救机器人建立了指标体系,并基于层次分析-熵-模糊综合评价方法开发了性能评价软件。现有文献大多采用层次分析法、模糊综合评价法对机器人进行分析,主观性较强,仅表述一种方法而未探究其他方法的有效性导致评价缺乏对比。储罐检测机器人指标繁杂且类型多样的结构特点使已有方法不能实现性能评价。因此本文作者探究一种合理的性能评价方法,为储罐检测机器人的性能比较与改进提供理论支持。
1 储油罐检测机器人评价体系的构建
评价体系的构建包括机器人指标体系的确定与评价方法的建立。本文作者采用改进的云模型综合评价方法进行评价,并将方法大致划分为三部分:确定储罐检测机器人性能评价指标;利用G1-CRITIC法(即以序关系分析(G1)法和基于层间相关性赋权法(CRITIC)确定主客观组合权重的方法)确定指标权重,并用云模型理论得出评价结果;对比不同模型的有效性。评价流程如图1所示。

图1 储罐检测机器人性能评价流程
1.1 储罐检测机器人的指标选取
本文作者结合国内外多种储罐检测机器人的形态结构特点与性能差异[6-8],以指标表示机器人特性。不同储罐检测机器人的工作环境如图2所示。单独为各类型机器人建立指标体系会导致工作量增大,对比性减弱,因此统一的指标体系更有利。速度、负载等指标受检测界面影响应独立表达为水平与垂直两种形式,以实现壁面、罐底机器人(单界面)和跨界面机器人不同性能指标的概括性构建。

图2 储罐检测机器人工作示意
评价指标体系是评价的基础,为实现储罐检测机器人众多指标合理有序的分析,建立了目标层、准则层和指标层的三级层次结构的指标体系[9]。以机器人的整体性能为目标,划分运动能力、检测能力、环境适应性、可靠性、安全性和环境交互性六大准则,各准则下有多个指标,组成指标层。
对工作环境的温度、腐蚀、污泥干扰、路径识别设置了相应指标,载荷与机器人本体重力之比为负载比。由所有运动、检测准则内的指标和抗压深度、持续工作时间、导航成功率与有效识别距离指标的19个定量指标,与另外的18个定性指标共同组成完整的指标体系。其中次级指标层为指标层指标电磁兼容与电气安全的扩展,如图3所示。

图3 储罐检测机器人的评价指标体系
1.2 评价方法的选定
确立评价指标体系之后,需赋予指标权重以进行求解。一般权重由专家赋值,为减少主观性,兼顾专家经验与数据变化规律,采用主客观赋权法获取组合权重。
G1法相比层次分析法(AHP法)、主成分分析法等主观赋权法不必作一致性检验,既能减小计算误差,也能处理机器人多指标、多准则的复杂关系。
很多客观方法从指标数据规律获取权重,数据多而全,可提高结果准确性。但储罐检测机器人的研究还处于初期阶段,样本少,类型多,选用方法不能过度依赖大数据。CRITIC法同时考虑数据波动性与数据间相关关系对权重的影响,不需过多数据也能挖掘出更多的数据客观属性,是一种在指标对比强度和相关性上都具备的优势方法。
云模型是由李德毅院士在模糊数学与概率统计基础上提出的定性、定量数据转换模型,因其可以将有限数据转化为无数点组成的不确定数据团,类似云滴形成模糊的云,称为云模型。为处理定性与定量指标同时存在的指标体系,采用云模型理论使指标信息汇合表达出机器人的整体性能。
利用云模型将精确的定量范围转化为评价标准云,以保证评语本身的模糊性与随机性。极值处理法会使某些指标为0而掩盖真实权重。例如罐壁检测机器人会因不存在水平速度指标而导致整体权重减小。为消除这一影响,选用功效系数法处理定量指标,对各指标作经验赋值来增加其权重,间接提高其评价结果至合理水平。
2 综合性能评价方法的建立
以综合赋权法处理G1-CRITIC法获取的主客观权重得到组合权重,再通过功效系数法等处理指标数据,利用云模型的虚拟云得出评价的结果。
2.1 G1法计算主观权重

x1>x2>…>xn
(1)
(2)给出指标间的相对重要程度比。设指标权重为wi(i=1,2,…,n),则有式(2)。rk的赋值参考文献[10]。
wk-1/wk=rk(k=n,n-1,…,3,2)
(2)
(3)计算评价指标权重wk。若评价者给出的理性赋值rk满足关系式(3)
rk-1>1/rk(k=n,n-1,…,3,2)
(3)
则wn为
(4)
wk-1=rkwk(k=n,n-1,…,3,2)
(5)
(4)求取指标对目标层的权重wz。若指标X相对上一层准则Y权重向量如下式
wyi(X)=(wyi(x1),wyi(x2),…,wyi(xn))Ti=(1,2,…,m)
(6)
则xj相对目标层Z的权重如下式
(7)
2.2 CRITIC法计算客观权重
设有m个机器人评价对象,n个评价指标,则xij表示对象i的指标j取值,构成原始评估矩阵X=(xij)m×n
(1)指标数据标准化。采用极值处理法对指标xij进行量纲一化,将数据转换至区间[0,1],以保持数据的波动性,削减极值对数据结构的破坏。依据指标的方向性分别做如下处理:
极大型指标(数值越大越好):
(8)
极小型指标(数值越小越好):
(9)
(2)计算指标对比强度σj
(10)
(11)
(3)计算指标冲突性与相关系数
(12)
(13)
fj反映的是指标间的相关程度,冲突性与评价的信息量正相关。rij表示指标i与j的线性相关系数,xqi、xqj表示第q个评价对象的指标i与j的值。
(4)计算指标信息承载量
Cj=σjfj
(14)
(5)计算指标j的客观权重
(15)
2.3 主客观组合赋权
为使主观与客观权重消除各自的性质缺陷,使经验与规律得到充分结合,选择综合赋权法处理。
(16)

2.4 云模型集结功效系数法处理的指标信息
根据云模型定义[11],对数据与权重进行集结。
(1)构建机器人评语集V={v1,v2,…vj…,vu}。vj表示第j等级的评分取值范围[cmin,cmax],c表示评分上下限。依据正态分布3En概念,标准云CV公式如下:
(17)
可得到云模型的评价等级标准。He通常取一个比En低一个数量级的常数,k取0.1。
(2)将指标全部转化为云数字形式。对于确定数值定量指标,将其表达为Pj→Cj=(Pj,0,0),P为指标j标准化处理后的数值。利用功效系数法[12]对定量指标处理,公式如下:
(18)
式中:mj、Mj分别为指标的最小值与最大值;a、b为对各个定量指标的赋值。
赋值规则为,将每个定量指标根据实际情况划分评价标准,不同标准赋予不同的a值。对某一评价对象D,将定量指标d1划分出u级评分标准{[x1,x2],[x2,x3]…[xu,xu+1]},u表示评语集因素的个数。评价标准越好a的赋值越大,并使Pj落在评语数值内。则a、b的取值如下式:
a={a1,a2,…,au},b=100-a
(19)
(20)
采用定量评分法,邀请N位专家为定性评价指标分别打分,其中定性指标的评分标准向评价标准云靠近,划分出不同程度的指标状况,同样采用评语集V={v1,v2,…,vm}。另外,打分数据也将作为定性指标在运算CRITIC法时的基础数据,客观法使用的指标值xij是多个专家打分的平均值。为将指标的专家评分值转化为云的数字特征,采用逆向云发生器,将其作为云滴输入产生云,公式如下:
(21)
(22)
(23)
其中:S2为样本方差;xi为单个专家评分值。
(24)
2.5 虚拟云模型的运算
将定性指标云数字与定量指标Cj=(Pj,0,0)按顺序排列。利用虚拟云的定义[13],组合基云进行逻辑运算得到新的云Xi,i=(1,2,…,m)为对象数。
(25)
由于新的虚拟云是由底层指标得到的,指标间独立性强,采用浮动云算法[14]进行综合集结运算。
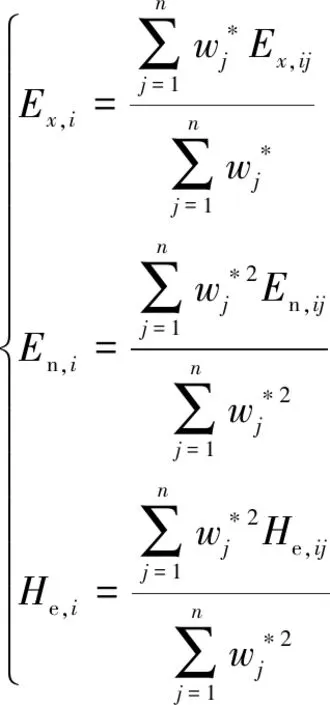
(26)

经过上述运算获得评价对象的云数字特征。采用云数字C(Ex,En,He)表示评价结果。其中期望Ex代表概念的整体评价值。熵En代表概念的模糊度,也表示云滴的可接受范围。超熵He用来描述熵的不确定性,反映云滴的稳定程度。以3个符号构建起云滴组成的云,与云模型的评价标准云对比,得到机器人的综合评价评语。
3 实例应用
储罐检测机器人的定量指标数据需要实际测试获取。作者搭建指标测试模拟平台,制定相应指标检测方法。结合各类型机器人的国家标准[15]以及相关资料,在符合储罐安全标准[16]的条件下为此类机器人的性能规范化检测提供科学的指导。
以课题内研发的罐壁检测机器人为例,获取专家评分值和指标测试结果,求取评价结果。
选取涵盖大部分类型的7个国内外储罐检测机器人(见表1),组成基础指标数据集X=(xij)7×37。

表1 储罐检测机器人
(1)建立“差”“较差”“中等”“良好”“优秀”五级评语集V={[0,30),[30,60),[60,80),[80,90),[90,100]},由式(17)可得评价标准云CV。
(2)邀请专家对储罐检测机器人的准则层和指标层之间的元素排序,并对其相对重要性之比赋值。以准则层为例,序关系为B1>B2>B5>B4>B3>B6,相对重要性之比r={1.3,1.4,1.2,1.2,1.2},代入式(1)—(7)可求得各准则权重。重复上述步骤,则有各指标的主观权重如表2所示。
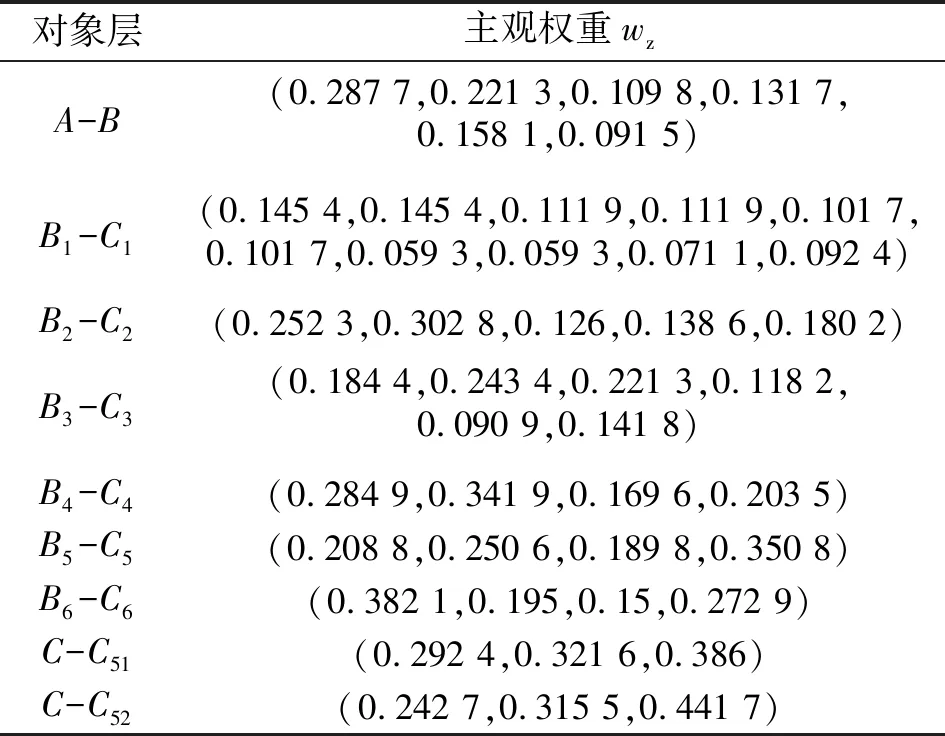
表2 指标主观权重
(3)邀请5位专家给7个机器人的定性评价指标分别打分,采用100分制定量评分法。评语等级为V={[0,30),[30,60),[60,80),[80,90),[90,100]},与评价标准云一致。专家依据经验打分。则R7的安全性指标打分如表3所示。
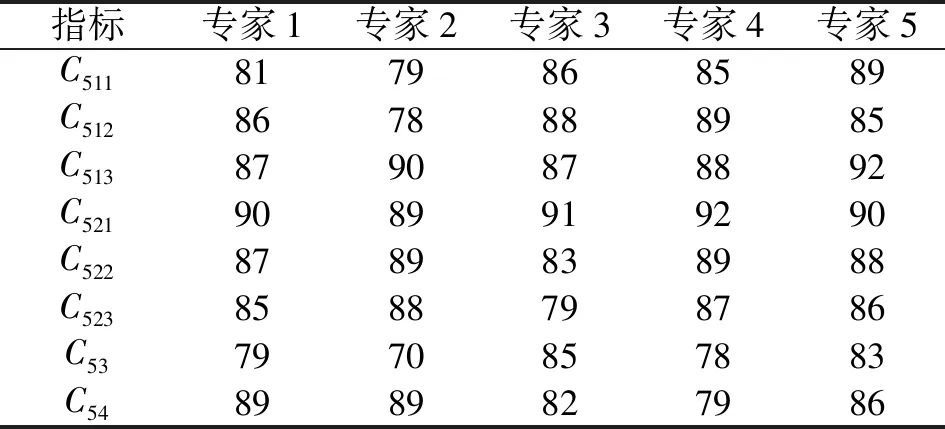
表3 R7的安全性指标专家评分
将专家对单一指标的打分取平均值作为R7中定性指标的基础数据,最终获得机器人的完整数据集X=(xij)7×37,部分指标数据如表4所示。
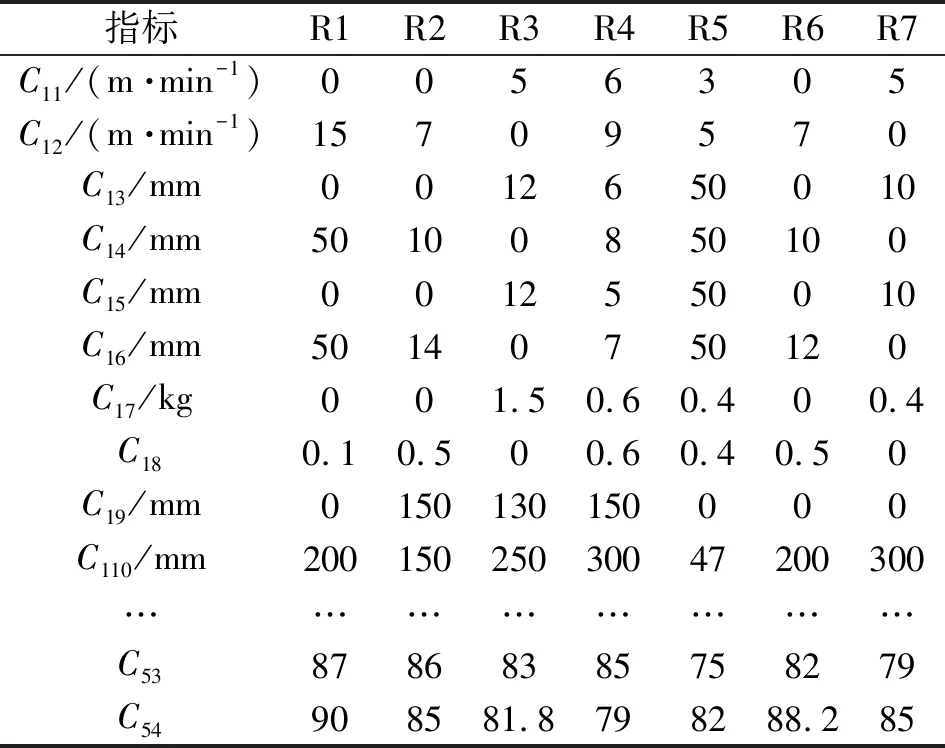
表4 机器人部分指标数据集
(4)根据公式(8)—(15)对其标准化处理后,求取指标客观权重,注意回转半径、导航定位精度、检测精度与检测实时性为极小型定量指标。运用公式(16)对主客观权重组合,获取底层指标的组合权重,如表5所示。
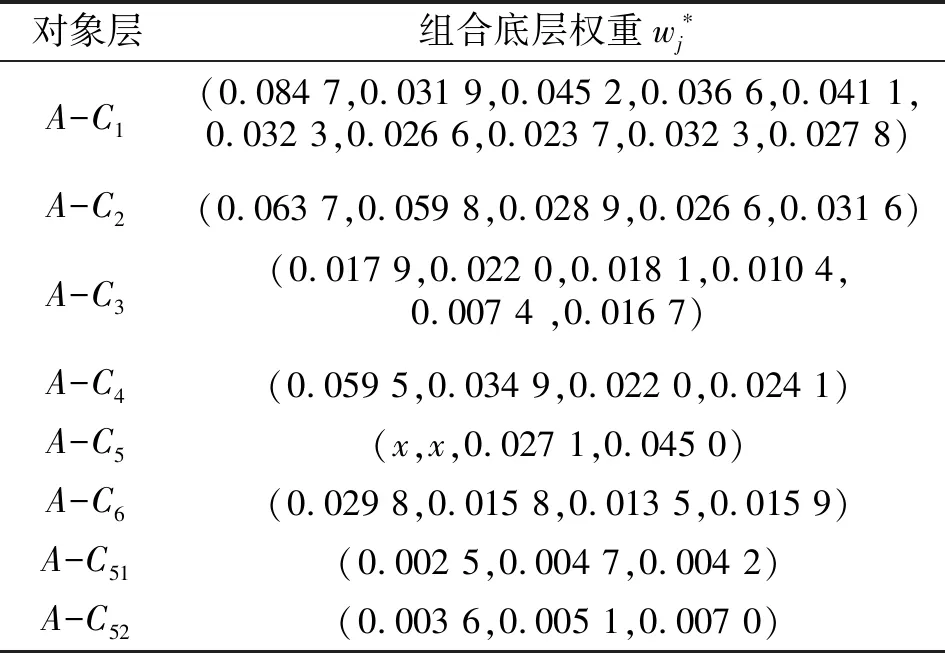
表5 组合权重
(5)获取指标云数字。将R7打分表数据代入式(21)—(24)中计算出定性指标的云数字特征。
对于定量指标,需要采用功效系数法进行处理。为确定a、b的值,同样将定量指标的取值范围划分为5个等级,当指标处于其中一个范围时,结合对应表赋予对应的a、b值。部分定量指标的赋值如表6所示。根据式(17)—(20)求得定量指标云数字。
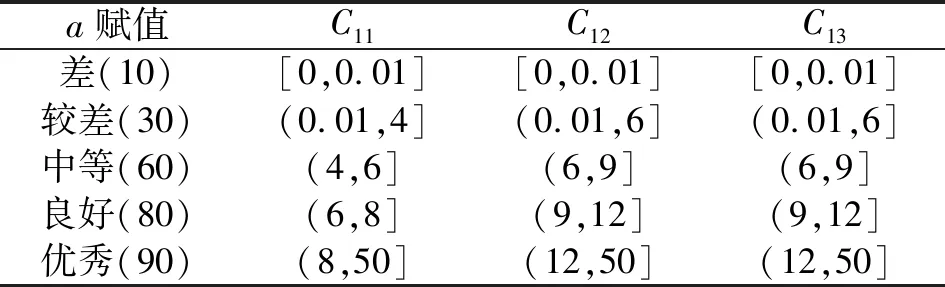
表6 部分定量指标a取值对应关系
(6)运用云模型理论集结数据与权重。依据虚拟云与式(25),将云数字组合为新的云X7。
运用浮动云算法并代入式(26),最终求得R7的综合评价云数字特征为C7(71.4,1.05,0.45),由评价标准云的对比可以得出R7的综合性能为中等水平。且熵与超熵值较小,表示评价结果具有良好的稳定性与收敛性。同理求得其他机器人的评价结果与性能等级,如表7所示。
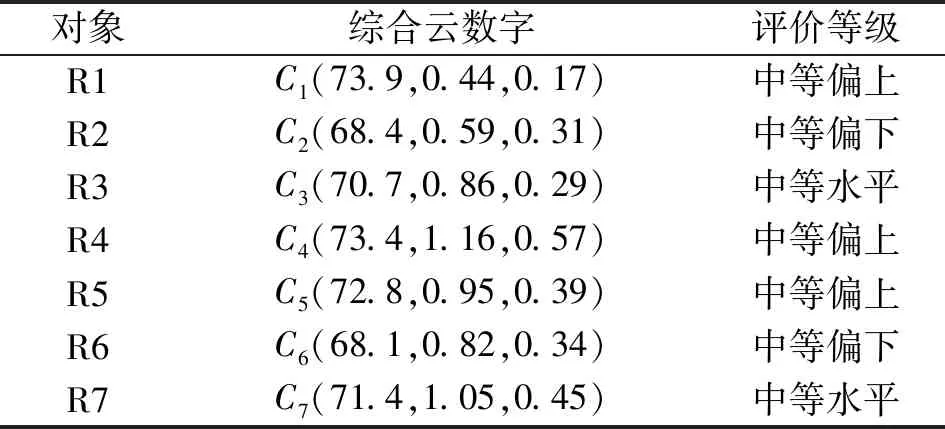
表7 机器人性能评价结果
R7的综合评价结果及评价标准云的性能等级划分如图4所示。
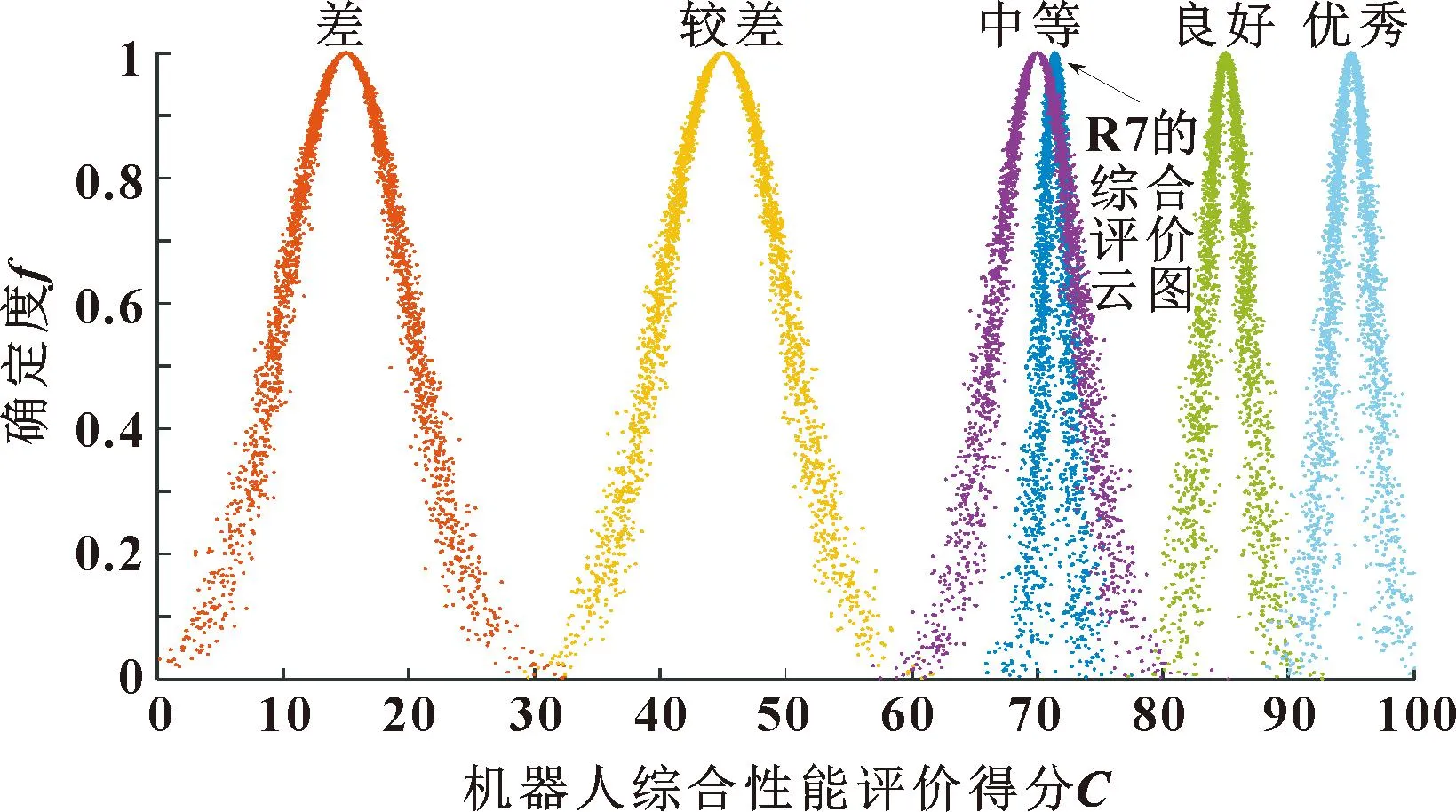
图4 机器人综合性能评价的云模型
4 模型对比与评价结果分析
储罐检测机器人性能评价方法的实例应用展现了云模型方法的可用性,但缺少与其他评价方法的有效性对比。可利用有效性测度的大小确定最优评价方法,并深入分析评价所得的结果。
4.1 多种评价模型的有效性对比
储罐检测机器人的性能综合评价问题的最优解是相对的而不是绝对的,但会追求多种决策路径中更合理的一种方法。因此选择引用频率较高及学者广泛认同的其他5种综合评价模型对此问题进行评价,对比验证文中综合评价方法的有效性。
本文作者基于序号总和理论和众数理论[18]对有效性进行测度。l种评价方法分别得出m个被评价对象的排序位置矩阵Ds(l×m),如下式所示:
(27)
求基准等级序列,即l种评价方法的参照系Bl。
(28)
Bl={Sum(1),Sum(2),…,Sum(m)}
(29)
如果序号总和相等,则运用众数理论按频次确定。如此,利用各方法的评价排序与参照系的斯皮尔曼(Spearman)秩相关系数R度量有效性,并查临界值表相比较是否具有显著相关性。公式如下:
(30)
其中:bj即参照系的元素;Rsi表示第i种评价方法的秩相关系数。
本文作者选择分别运用AHP-熵-模糊综合评价法(M2)、AHP-熵-TOPSIS综合评价法[19](M3)、G1-CRITIC-VIKOR综合评价理论[20](M4)、熵值法(M5)、序关系分析法(M6)以及文中的云模型方法(M1),对R1~R7进行评价并将结果排序,如表8所示。

表8 评价得分与排序结果
将其按有效性公式(27)—(30)计算,并将结果进行检验,确定其正负相关性。其中M1的Rs=0.893>0.829,表明秩相关系数与检验值正相关。根据数值大小对有效性测度的结果进行排序,M1>M4>M5>M3>M6>M2,M1的有效性最好。
从图5可看出:曲线M1更接近参照系曲线BL,即曲线M1最接近理想评价结果。从评分形式上,M1的百分比评价结果也更易理解。综上所述,曲线M1表示的云模型综合评价方法相比其他评价方法具有更好的表现及更大的优势。
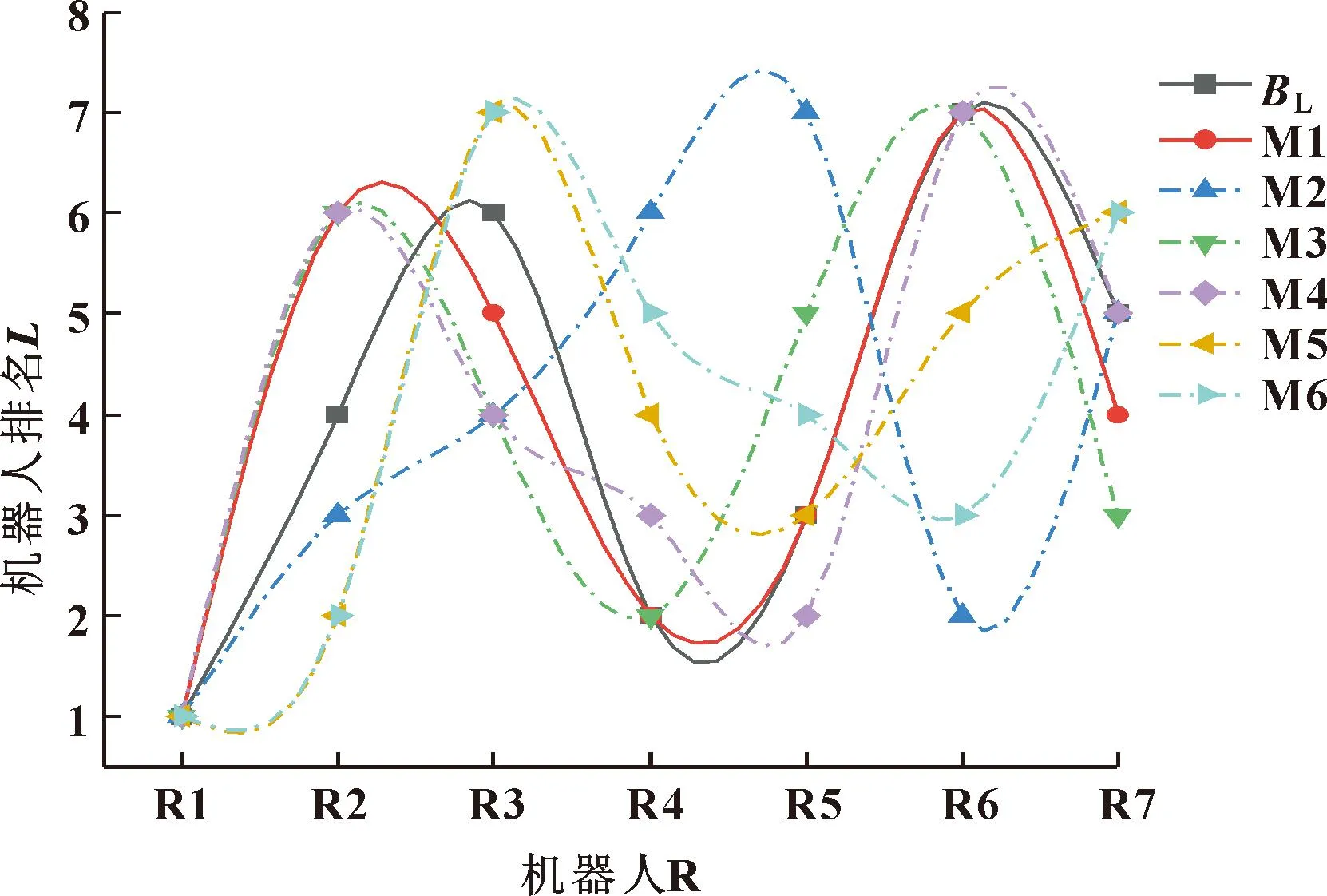
图5 各模型排序与参照系对比
4.2 储罐检测机器人性能评价结果的分析
运用上述云模型的评价方法计算后,将7个机器人评价结果以柱状图展示,如图6所示。依据文中构建的统一评价体系,能清晰地对比出不同结构的储罐检测机器人性能优劣。对于R7的评价得分,在交互性能上优于同为壁面机器人的R3;与罐底机器人R6和R2相比,明显在运动性能上的分值更高,可知壁面作业的高难度为垂直方向上的指标获得了更大的权重;与具备界面转换能力的机器人R4、R5相比,R7没有水平方向指标的权重导致评分值大减。与R1相比,R7的检测与交互性能不强,但其由专业储罐检测机器人公司最新研发,结构具有一定的优越性,因此评分较高。从整体看,机器人大体都在中等水平,且R7具有一定优势,与罐壁机器人R6配合能很好地完成检测工作。
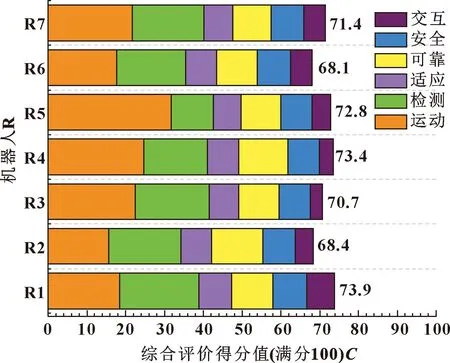
图6 机器人各准则与总体评价得分
相对于模糊层次分析法的主观因素过强,本文作者运用合适的主客观方法在机器人样本较少的情况下成功获得了R7客观修正的组合权重,为保证R7结果不受水平方向上的指标干扰,引入了功效系数法改进云模型来平衡定量、定性的指标体系,最终获得了R7合理全面的评价结果。
单独列出各对象的态势图分析指标对整体评价结果的影响,曲线与轴线构成的白色区域面积对应各机器人的总体评分,如图7所示。

图7 指标的权重态势图
图3所示的37个底层指标从左向右排列在图7所示的单项指标轴,可以看出:运动能力(单项指标轴1-10)对应的曲线所构面积最大,即占总评分比重最高,但各曲线波动差异较大,表明不同机器人运动性能参差不齐,应该借鉴优秀技术,针对落后项取长补短;检测性能(指标11-15)占比次之,检测精度(指标11)对应的各曲线都处于高峰值,表示该指标普遍较好;可靠性方面,持续工作时间(指标22)占比较高,但从各曲线起伏对比上看,部分机器人还有较大的改进空间;在安全性(指标26-33)上,虽然其占比重较低,但各曲线都与理想值曲线接近,表明对该项的重视度较高;而随着机器人技术的发展,环境交互方面,尤其是自主导航与有效识别距离(指标34,37)两项指标曲线抬升明显,表明相关技术有了明显改进。
因此,依据指标的权重与现有的评价结果,建议加快改进储罐检测机器人的运动能力,增加持续工作时间,提高机器人工作可靠性,在确保安全性的前提下,继续优化检测性能与环境适应性。
5 结论
本文作者从多种储罐检测机器人的结构特性以及工作环境的分析中构建了具有普适性的指标体系,适用于单面式与双面式机器人。设定指标测试规范并搭建指标测试模拟平台对文中评价对象进行实际的指标数据测量。
(1)通过基于G1-CRITIC法组合赋权的云模型评价方法,以G1法获取指标的主观权重,利用CRITIC法修正权重,避免性能综合评价主观性过重的状况。
(2)运用云模型的定量、定性转换与集结能力,引入功效系数法处理定量数据,解决了不同结构的机器人评价指标不同导致权重分配不均衡的问题。利用逆向云发生器处理定性指标,使数据趋于人类思维的模糊表达,使运算的评价结果更真实。同时云数字形式的评价结果更易分析出对象的性能特征。
(3)选取多种方法进行对比,有效性测度的结果印证文中储罐检测机器人性能评价方法的合理性与优越性,能够为后续储罐检测机器人的研发改进提供参考。
猜你喜欢
江苏安全生产(2024年3期)2024-04-10 09:01:48
煤气与热力(2022年4期)2022-05-23 12:44:58
建材发展导向(2021年14期)2021-08-23 00:56:22
当代陕西(2020年17期)2020-10-28 08:18:18
世界科学技术-中医药现代化(2020年2期)2020-07-25 02:06:06
中成药(2018年12期)2018-12-29 12:25:44
人大建设(2018年5期)2018-08-16 07:09:00
电信科学(2017年6期)2017-07-01 15:44:57
中成药(2017年6期)2017-06-13 07:30:35
—— 储罐
党员干部之友(2016年6期)2016-08-01 06:06:49
