SLAM 技术及卷积神经网络(CNN)技术支持下的自动修剪机器人设计*
2024-04-12 06:29林兰珂黄祖添李映烨莫潇蓬李婷婷
南方农机 2024年7期
刘 杨 ,林兰珂 ,黄祖添 ,李映烨 ,莫潇蓬 ,李婷婷 ,陈 皓
(桂林电子科技大学,广西 桂林 541004)
0 引言
2021 年3 月15 日,习近平总书记在中央财经委员会第九次会议中提出:我国力争2030 年前实现“碳达峰”,2060 年前实现“碳中和”。随着园艺文化在全球各国逐渐兴起,园林机械产品进入各个城市的千家万户,成为城市绿化和家庭园艺生活必不可少的好帮手[1]。目前市场上绿植外观多样,修剪设备种类也比较多,但在使用中需要较多的人工干预,修剪的效果对工人的技术水平要求也比较高。为实现修剪的精确性与智能化,机器人必须有能力在地图上定位自己,并创建所需要修剪绿植的图片形状,同步定位与建图需要应时而生,主要包括实现自主定位与建图算法两个任务。这两个任务的实现需要机器人具备SLAM技术和图像边缘检测算法[2],还需具备卷积神经网络(CNN)算法和机器视觉YOLOv3-spp算法的能力。
使用SLAM 技术和图像边缘检测算法,可以使机器人在不需要人为控制的情况下完成修剪任务,实现自主导航和定位;利用卷积神经网络(CNN)算法和机器视觉YOLOv3-spp 算法,可以使机器人准确识别花草、灌木等植物的形状和位置,实现高精度修剪[3];使用Canny 边缘检测算法可以有效提取图像边缘信息,进一步提高机器人的修剪效率和精度[4]。
机器人是当今最热门的研究领域之一,需求巨大的自动修剪类机器人更是极具可研究性的方向。本文在已有研究的基础上提出一种基于SLAM 技术及卷积神经网络技术的自动修剪机器人,以解决现行市场上园林修剪机器人存在的弊端[5],更好地方便人们的生活。
1 自动修剪机器人基本系统设计
自动修剪机器人总体上的结构需求分为以下两个部分:1)硬件系统。一个机器人底盘、可伸缩机器臂、激光雷达、摄像头、IMU 等传感器以及一个可编程的微控制器和电池组。2)软件系统。以树莓派3B+(ROS Master)为主体,使用嵌入式技术为其安装轻量级的、成熟的、易于控制的Linux 系统(如Ubuntu 18.04)。自动修剪机器人工作流程如图1所示。
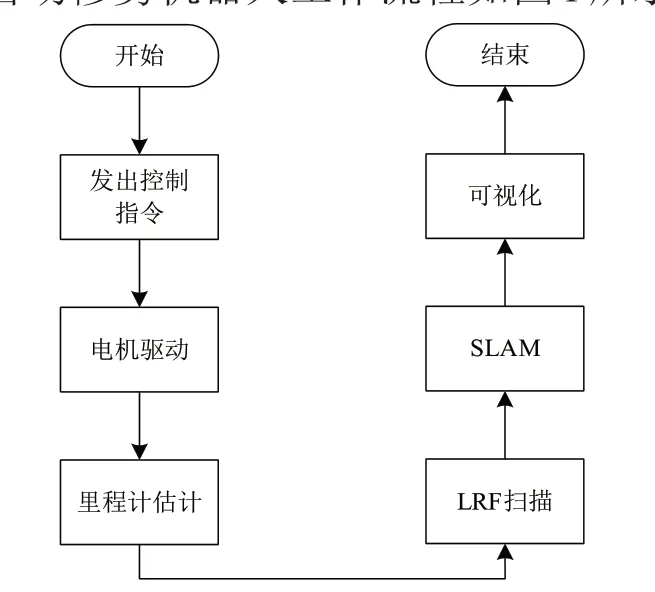
图1 自动修剪机器人工作流程
硬件系统主要功能是接收遥控雷达信息、无线信号等,并且在Gmapping SLAM 技术的支持下引导机器人到达指定地点,使机器人在经过多重深度的算法学习后,能够按照给定指令对园林花草进行精确工艺修剪,如图2所示。
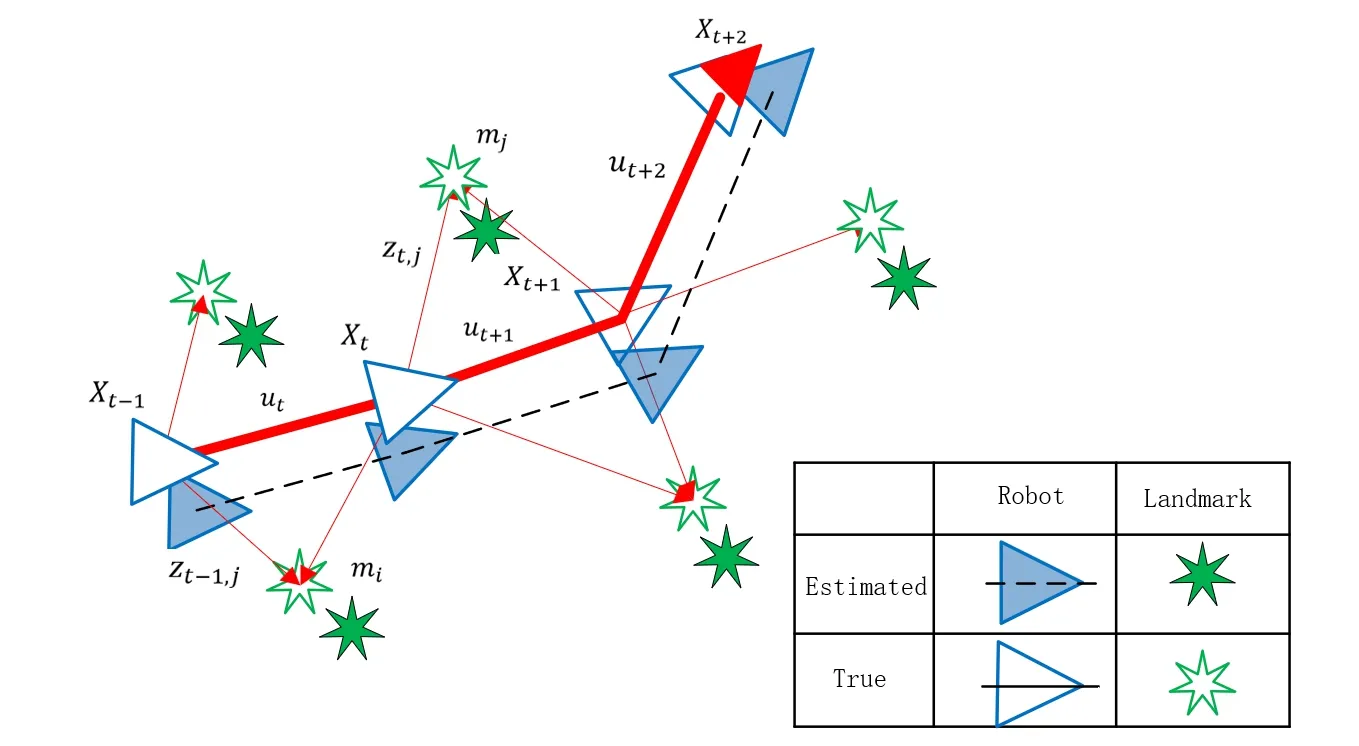
图2 Gmapping SLAM自动寻航示例
软件系统主要功能是给机器人提供Gmapping SLAM 导航、机器人视觉学习(卷积神经网络(CNN)算法和机器视觉YOLOv3-spp 算法)、机器人动力控制和安全控制技术,并提供更友好、更简便的交互(GUI界面或者Terminal终端)。
2 自动修剪机器人视觉系统设计
自动修剪机器人主要采用深度学习算法对植物进行识别。针对植物的不同部位,分别采用不同的视觉特征进行检测,保证精准剪裁指定的区域与形状,例如,分割算法中的边缘检测类Sobel 和Canny 两种算法。Sobel 算子是一种常用的边缘检测算子,它基于图像中像素值的梯度来识别边缘;而Canny 边缘检测算法是在Sobel 算子的基础上减少图像噪声,将像素分为强边缘、弱边缘和非边缘三类,最终确定图像中的边缘。使用图像边缘检测算法——Sobel 算子,来检测植物的轮廓。结合深度学习和图像分割算法进行植物的精确分割,以便机器臂能够更精确地定位到目标位置[6]。Sobel算子示例与植物轮廓如图3所示。
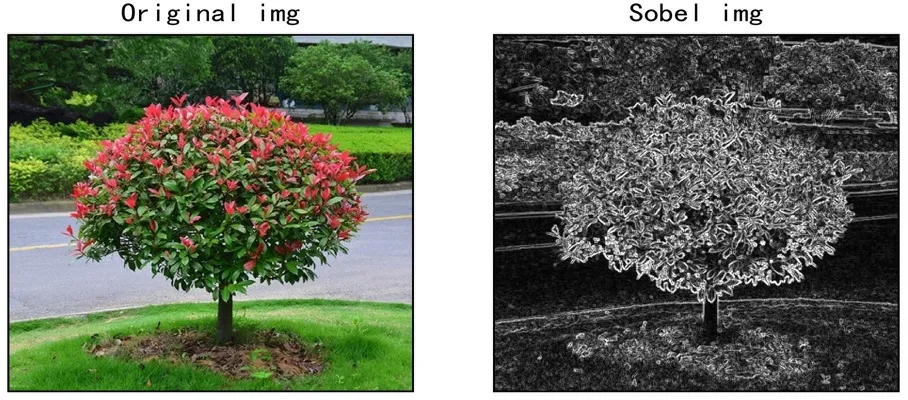
图3 Sobel算子示例与植物轮廓
针对园艺植物初步的精确识别,保证了自动修剪机器人的修剪功能后续得以更简便地操作。Canny边缘检测算法示例与植物边缘成像如图4 所示。
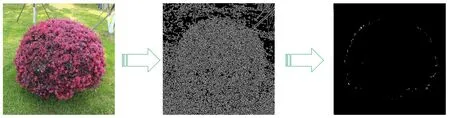
图4 边缘检测算法示意图
自动修剪机器人使用Canny 边缘检测算法将进一步获取到园艺植物的轮廓,为自动修剪机器人主要功能——修剪功能的设计,提供进一步的技术支持,使其能够针对不同的园艺形状进行精确切割。
3 自动修剪机器人机械臂设计
机械臂主要组成部分:筒状三重旋转切割器、机械小臂、机械中臂、机械大臂以及胶管。机械臂的动力来自电动机,这使得它更环保且操作安静。动力系统经过精确控制,可以使机械臂在不同的园艺表面上平稳运行,确保剪切质量。可通过远程控制或预设程序来操控机械臂。不仅可以通过智能手机或计算机来轻松控制它,也可以根据需要进行编程,以满足不同的剪切需求。机械臂还装有多种传感器,以感知周围环境,从而能够避开障碍物并确保操作安全[7]。安全性是设计的重要考虑因素之一。机械臂具备紧急停止按钮,以应对突发情况。此外,它的传感器系统能够感知障碍物,并自动避免碰撞,确保使用过程中的安全性[8]。
机械臂的设计使得维护非常简便,易于操作者进行日常保养,如图5 所示。零部件易于更换,因此维修和保养成本低廉[9]。建议定期检查螺旋器和刀片等关键部件,以确保机械臂始终保持高效运行。

图5 机械臂设计
如图6 所示,机械臂的设计符合相关国家法规和标准,包括机械设备和园艺工具的安全标准,可确保用户的安全,且具有合法性。机械臂的颜色设计参考国家标准GB 2893—2008《安全色》,黄色通常用于表示警告或注意。这意味着黄色常被用来引起人们的警惕,提醒他们注意潜在的危险或需要采取特别的安全措施。国家标准还规定了黄色的亮度和对比度要求,以确保黄色标志在各种照明条件下都能够引起人们的注意。
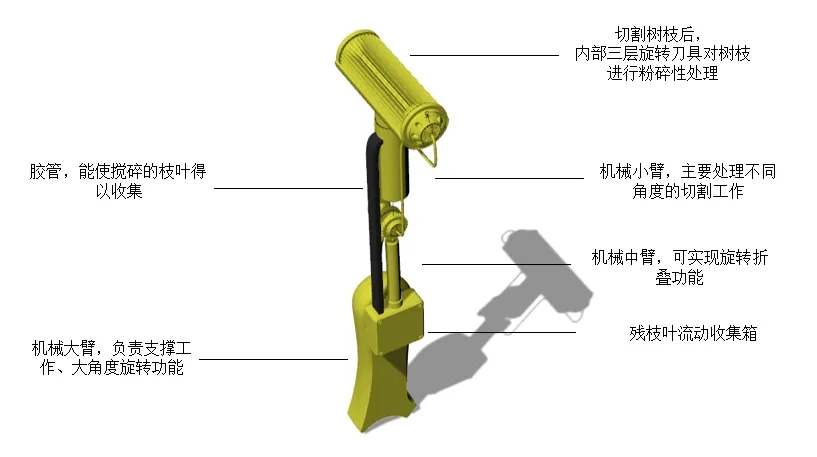
图6 机械臂详细构造
4 技术推广及应用
4.1 市场机会
园林艺术既包括对自然生态的保护和恢复,也包括人类文化和审美的表达,随着社会经济的发展,人们对园林艺术的需求也在不断增长。这种需求不仅要不断创新理念和表现方式,更需要高效和精准的技术支持。而经过智能技术融入的产品相比于传统的园林设备会拥有更加高效和精准的表现,例如通过人工智能技术对植物进行智能化管理,达到更好的生长和美化效果;通过大数据和云计算技术对园林景观数据进行采集和分析,使得园林设计更加合理。
就目前而言,自动化园林机器人行业在国内市场相对空白,随着政府对环境友好型社会和可持续发展的重视,消费者也对机器人所带来的智能化、便利性更加青睐,自动化园林机器人的需求正在不断增长,并且随着科技的不断进步和成本的降低,真正实现走进千家万户。现行大数据背景下,智能技术的融入是必然趋势,向着智能化发展将成为园林行业和园林设备行业的重要目标方向。自动化园林产业的发展与实现不仅可以满足消费者的要求,也可以提高此行业的竞争力。
4.2 市场应用
根据不同的用户需求和使用场景,机器人需要具备相应的功能,如自动浇水、植物生长监测、草坪修剪等。因此,本产品基于机器人的安全性和稳定性,在确保用户使用体验的同时,致力于解决高危、高空景区或公路上高大树木的安全隐患问题,提供优质的售后服务,保证机器人的长期稳定运行。
4.3 风险控制
前期通过建立完善的技术测试和验证机制,定期对产品进行测试和验证,发现并解决技术问题。在实际应用过程中,用加强对技术团队的培训和激励、吸引和留住高端技术人才等方法不断解决可能出现的机器人算法不够稳定、传感器数据噪声较大等问题,并且持续关注技术发展趋势,及时调整技术路线,确保技术的领先性。
4.4 市场痛点与创新点
传统的花草修剪方式效率较低、精度不一,在修剪过程中存在一定的安全隐患,并且随着经济的发展,人工成本呈现逐年升高趋势。使用SLAM技术和图像边缘检测算法,可以使机器人在不需要人为控制的情况下完成修剪任务,实现自主导航和定位;根据使用者的指令或预设参数,自动获取花草树木的生长状态和修剪需要,实现定向的修剪,并通过摄像头和传感器等技术,自动调节切割区域和切割深度。利用卷积神经网络(CNN)算法和机器视觉YOLOv3-spp算法,可以使机器人准确识别花草、灌木等植物的形状和位置[10],实现高精度修剪。使用Canny 边缘检测算法可以有效提取图像边缘信息,进一步提高机器人的修剪效率和精度,减少人工操作和干预。可以进行无间断工作,并且速度比人工修剪更快,提高了修剪效率,减少了修剪时间和工作量。可根据使用者的需求和花草树木的特性进行个性化定制,调整修剪的方式和范围,从而实现更精细的修剪效果。自动修剪机器人可以使用清洁能源,避免人工修剪中使用的汽油或柴油等燃料对环境造成污染,同时也减少了人工修剪带来的安全隐患。
5 结论
综上所述,该机器人具有自动导航、视觉系统判定、智能化修剪等优点。项目组所研制的自动修剪机器人可通过搭载的Gmapping SLAM 技术进行地图的栅格化探测与处理,并实时更新、保存一定范围内的地图,是自动化园艺机器人应对复杂多变的城市道路的最优解。机器人应用了卷积神经网络(CNN)技术,搭配图像边缘检测算法——Sobel 算子,可以有效地提高识别与判定植物的不同部位的能力,使机器人针对不同已知模块进行相对应的处理,增强了该机器人园艺方面功能的丰富性及应用的拓展性。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
当代工人(2020年8期)2020-05-25
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
小溪流(画刊)(2017年12期)2018-01-10
通信产业报(2016年44期)2017-03-13
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
电视技术(2014年19期)2014-03-11
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13