考虑故障归一化的五相永磁电机低转矩脉动容错控制
2024-04-08 02:46:16孙张俊宋飞跃
测控技术 2024年3期
孙张俊,宋飞跃
(1.西安交通大学管理学院,陕西西安 710049;2.航空工业西安飞行自动控制研究所,陕西西安 710065;3.陆装驻西安地区航空军事代表室,陕西西安 710065)
全电/多电飞机中使用电力传动系统代替传统的机械、液压或气动系统,能够显著提高飞机的维护性、可靠性、保障性和经济性[1-3]。为了满足全电/多电飞机中飞行控制、起落架等对容错性和安全性的要求,国内外研究人员对高可靠作动技术的研究日益增多[4-6]。电作动伺服系统具有良好的静、动态性能,在满足作动系统高功重比要求的同时,相对液压作动,还具有更高的维护性和可靠性[7-9]。
多相电机具有低转矩脉动、低电流应力、高功率密度和强容错能力[10-14],在电作动领域具有广阔的应用前景。相较于传统三相电机,多相电机最显著的优点是能够实现带故障容错运行[15-21]。其中,五相永磁电机可以在单、双相开路故障下工作,因而受到国内外学者的广泛关注[22-25]。
Liu等[26]分析了五相感应电机绕组开路后空间谐波场耦合对转矩脉动的影响,设计了两个谐振频率的比例谐振控制器分别跟踪基波和三次谐波电流,改善了容错运行时的转矩性能。然而,该方法各相参考电流计算复杂,并且需独立的H 桥逆变器驱动。Tian等[27]提出了一种基于滑模变结构的五相永磁电机容错控制方法,其采用饱和函数代替控制律中的符号函数,减少了系统输出振荡。然而,滑模控制的增益值取决于干扰边界的估计和极端的实验工况,不利于工程实现。Huang 等[28]针对五相电机开路故障,提出了一种改进的模型预测转矩控制,有效控制了基波和谐波空间各分量,并减小了计算负担。然而,其提出的预测控制的价值函数包括转矩、定子磁链、谐波电流等不同量纲的控制量,须配置多个权重系数,导致参数整定过程烦琐,实时性差。Tao 等[29]提出一种连续调制的模型预测容错控制,通过重构容错矢量,采用多矢量调制改善了电机容错运行时的转矩脉动。然而,该方法未能有效分析电机开路后的转矩特性,故障转矩脉动增大的根源不明确。
此外,现有的容错控制策略研究主要集中于特定单相或两相绕组故障后的容错控制,如五相电机系统中的A相故障、A相和B 相故障,以及A 相和C 相故障。然而,对于五相电机系统而言,有15 种不同种类的相绕组开路故障。如果为每个故障构造相应的降阶解耦矩阵,并采用磁场定向控制、直接转矩控制或模型预测控制算法,容错控制策略将变得非常复杂且难以实现。
为解决上述问题,本文提出一种考虑故障归一化的低转矩脉动容错控制,旨在抑制五相永磁电机不同类型缺相故障下的转矩脉动,并简化容错控制算法。首先,分别构造了单相开路故障和两相开路故障的降阶解耦矩阵和故障电机数学模型,剖析了五相容错电机开路故障时二次、四次谐波转矩脉动产生的机理,采用比例积分谐振(Proportional Integral Resonance,PIR)控制器以抑制特定次谐波的转矩脉动。然后,提出了基于转子位置的旋转变换方法,将15 种不同的相绕组开路故障归一化为3 种类型的故障,简化了容错控制算法。最后,搭建了五相永磁电机实验平台,实验结果验证了该容错控制策略的正确性和可行性。
1 故障数学建模
采用半桥电压源型逆变器供电的五相永磁电机系统如图1 所示。矢量控制不仅可以实现五相永磁电机正常工作时的高精度、高动态运行,在一相或两相绕组开路故障后,通过构造缺相降维解耦矩阵,仍然可以实现d、q轴电流的解耦控制,从而提高电机容错工作性能。

图1 五相永磁电机系统
式(1)为五相永磁同步电机在正常运行下的Clarke变换矩阵,式(2)为Park变换矩阵。
式中:δ =0.4π,为五相绕组之间的相位差。
式中:θ为电机转子位置电角度。
1.1 单相绕组开路
一次开路故障时,构造四阶降维解耦矩阵,利用剩余相绕组重构旋转磁势,进行容错控制,其流程图如图2 所示。
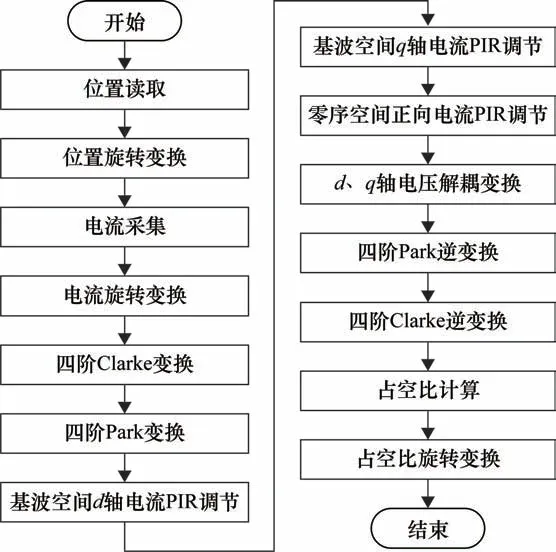
图2 一次开路故障容错控制软件流程示意图
以A相绕组故障为例,故障后Clarke 变换矩阵需要去掉一行一列,导致行向量不再相互正交。为了使行向量相互正交,需要对Clarke变换矩阵进行重构:
1.2 相邻两相绕组开路
以C、D相绕组故障为例,故障后Clarke变换矩阵需要去掉两行两列,如下:
为了使矩阵的行向量相互正交,需要对Clarke 变换矩阵进行重构:
重构后,α、β和z轴的行向量可以满足如下关系:
其逆矩阵为
另一方面,健康状态下的电感矩阵为
式中:Lm1为基波电感幅值。
在C、D两相绕组开路的情况下,电感矩阵需去掉两行两列:
从而可以得到d、q轴坐标系下的电感矩阵:
最终,选取二阶矩阵并进行化简,可得解耦矩阵:
1.3 不相邻两相绕组开路
以B、E相绕组故障为例,故障后Clarke变换矩阵需要去掉两行两列,如下:
按照上述方法重构矩阵,同理可得:
由d、q轴坐标系下的电感矩阵推导过程,同理可得解耦矩阵:
2 电机非对称运行转矩脉动分析
以C、D相绕组开路故障为例,分析故障下的转矩脉动。
首先,由式(2)和式(4)可得,在id=0 控制下,C、D相绕组开路故障容错运行时的各相参考电流为
考虑三次谐波,电机在C、D相绕组开路故障容错运行时转子谐波磁链为
式中:ψm3为转子磁动势在各相绕组中产生的三次谐波磁链幅值。
同时,谐波转矩可以通过磁共能对转子位置求偏导得到:
将式(15)和式(16)代入式(17),可得:
式中:P为电机极对数;K2θ和K4θ分别为2 次和4 次谐波转矩系数;δ2θ和δ4θ分别为二次和四次谐波项相位。
由式(18)可以看出,电磁转矩中含有二倍、四倍基频的脉动项。在交流系统中,比例积分控制器由于对高频信号的跟踪性能较差,不能满足设计要求,而比例谐振控制器对特定频率信号的跟踪效果是良好的。因此,引入PIR 控制器以消除特定频率的转矩脉动。本文采用准谐振控制器实现对特定频率转矩脉动的抑制,其传递函数为
式中:Kr为谐振控制器的增益;ωc为谐振控制器的带宽,ωc过小会使谐振控制器对频率波动敏感,不利于实际控制,ωc过大会使谐振作用干扰到其他频段,不利于系统稳定;ω0为谐振频率,即需要抑制的谐波频率。可以通过增加多个谐振器实现对不同频率转矩脉动的抑制。
本文电流环PIR调节器传递函数为
式中:Kp为比例环节增益;Ki为积分增益;Kr为谐振控制器的增益;ω02为二倍频谐振频率;ω04为四倍频谐振频率。
由式(20)可知,电流PIR 调节器包含比例环节、积分环节、二倍频谐振环节和四倍频谐振环节,本文通过两个谐振环节分别对电流注入了二次和四次谐波,旨在消除转矩脉动中的二次和四次谐波成分,实现了基于双谐振器的谐波注入算法,降低了转矩脉动。
3 故障定位及归一化变换
五相永磁电机绕组开路故障共有15 种(单相开路故障5 种,两相开路故障10 种),如果为每个故障类型配置容错算法,将会导致系统变得复杂,同时可靠性降低。为此,本文提出一种故障归一化变换方法,将15 种故障归一化为3 个类型的故障。
由电机的数学模型可知,已知电机的绕组相电压,可以得到该相电压作用下的相电流输出,而相电压可以通过开关状态、母线电压计算得到,因此可以将此方法计算得到的电流值作为绕组相电流的模型参考值,与实际采集的相电流进行比较,输出故障标志位。
模型监控根据电机的数学模型计算各相绕组相电流的参考值,并与实际采样的相电流比较进行故障判断。相比残差监控,模型监控具有更高的实时性,即使电机转速为0,算法仍然适用。而相电流为0 的残差监控方法难以实现电机带载静止时相电流自身不平衡时的故障诊断。
五相容错永磁同步电机采用集中绕组容错齿结构,实现了各相绕组之间的物理隔离,绕组之间的互感相对自感可以忽略。因此忽略互感产生的压降时,相电流输出可表示为
式中:il为任一相电流;上标*为计算值,无上标为采样值;k为当前拍采样值;k +1 为当前拍计算值;uln为任一相电压,由母线电压和占空比估算;el为任一相反电势,由电机磁链和转子位置估算;Ts为采样周期;rp、lp分别为绕组电阻、电感。
在容错算法前级增加电流、位置旋转变换,在容错算法后级增加占空比旋转变换,将单相故障容错算法归一化为A相故障容错算法,将相邻两相故障容错算法归一化为C、D相故障容错算法,将相隔两相故障容错算法归一化为B、E相故障容错算法。
以D、E 相绕组故障为例,容错算法前级电流、位置归一化的表达式可写为
后级占空比归一化变换可以表示为
相邻两相故障时的控制框图如图3 所示。五相电机电流经过采样后,首先进行故障定位,将任一相邻两相故障进行电流和位置前级归一化变换至C、D 相开路故障的情况,变换后的电流经过坐标变换得到d、q轴电流反馈,与d、q 电流指令比较之后输入进行比例谐振控制,依次对输出进行解耦、坐标逆变换得到C、D相开路故障对应的占空比,最后通过占空比后级归一化变换得到任意相邻两相故障对应的占空比。
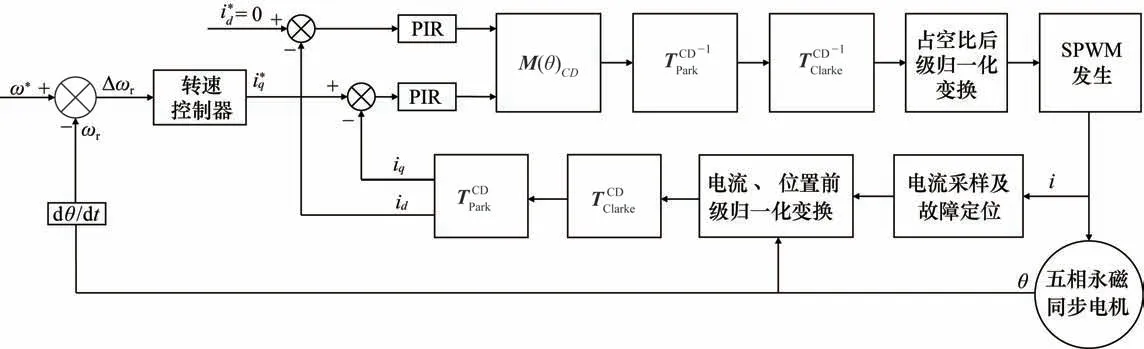
图3 五相电机相邻两相开路故障容错控制框图
4 实验验证
为了验证本文提出的容错控制算法的正确性,搭建了五相永磁电机实验平台。
试验样机参数如表1所示。控制参数如表2所示。

表1 五相电机参数

表2 控制参数
表2 中,二倍频谐振频率和四倍频谐振频率是与转速正相关的计算值,n 为电机机械转速,P 为电机极对数。
实验中,母线电压为30 V,电机转矩为0.4 N·m,转速为400 r/min。实验平台如图4 所示,正常运行时的相电流波形如图5 所示。

图4 实验平台

图5 正常运行时的五相永磁电机相电流波形
在电机发生故障后,定义d、q 轴电流调节器仅采用比例积分(Proportional Integral,PI)时的算法为容错算法I,采用PI +二倍频谐振时的算法为容错算法II,而采用PI +二倍频谐振+四倍频谐振时的算法为容错算法III。
4.1 单相开路
以A相发生开路故障为例,实验结果如图6(a)所示,包含3 个工作过程,即正常工作、一次故障采用容错算法II和一次故障采用容错算法III。其中,波形从上至下依次为d轴电流、q轴电流、零序空间正向电流和E相电流。

图6 单相开路容错控制实验
实验中,电机首先正常运行,在30 s后,通过断开A相绕组模拟单相开路故障,故障定位后采用容错算法II进行控制。在运行一段时间后,电机容错控制算法切换为容错算法III。正常运行至容错算法II 和容错算法II 至容错算法III 的瞬态切换波形分别如图6(b)、6(c)所示。
波形前段为正常工作区间,中间较粗部分为容错算法II工作区间,后段为容错算法III工作区间。
从实验波形可以看出,相较于容错算法II,容错算法III有效降低了d、q轴电流中的四倍频脉振幅值;同时还可以看出,采用容错算法III 后,q 轴电流的脉振幅值与正常工作持平,其转矩平稳性能符合伺服系统要求。
4.2 相邻两相开路
以C相、D相模拟相邻两相开路故障,实验结果如图7 所示。其中,波形从上至下依次为d 轴电流、q 轴电流、零序电流和B相电流。

图7 相邻两相开路容错控制实验
开始时,电机处于正常运行状态,在6 s时模拟发生相邻两相开路故障,故障定位后切入容错算法I,12 s后切入容错算法III。从实验结果可以看出,采用容错算法III时,q轴电流的脉振幅值缩小为容错算法I 时的1/4,d轴电流脉振幅值缩小为容错算法I时的1/5。
4.3 不相邻两相开路
以B相和E相构造不相邻两相绕组开路故障,实验结果如图8 所示。波形从上至下依次为d轴电流、q轴电流、零序电流和D相电流。
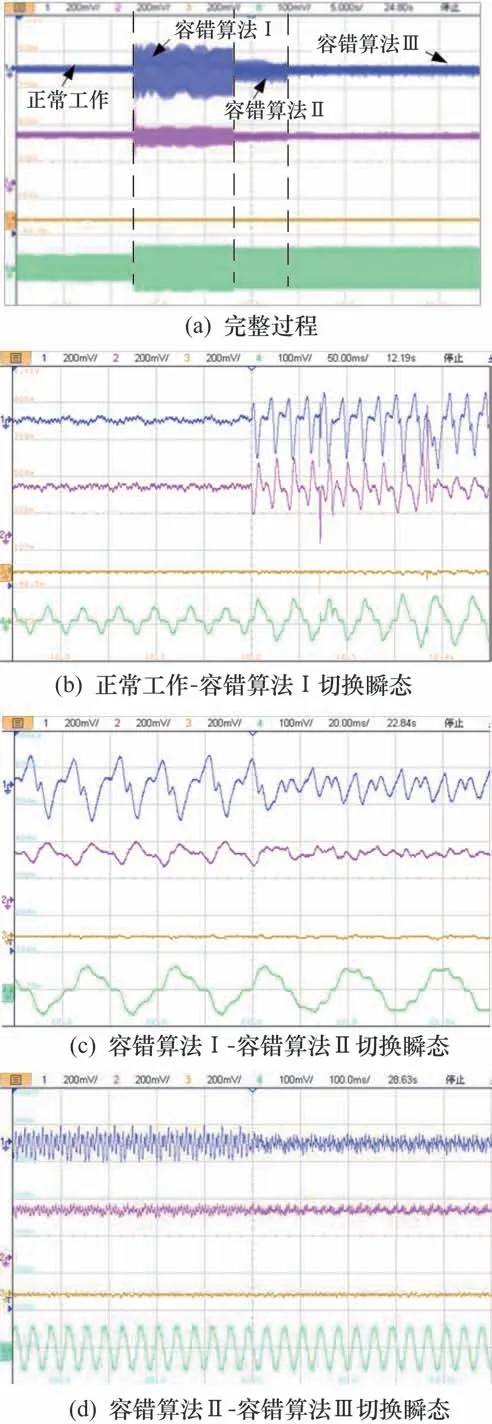
图8 不相邻两相开路容错控制实验
首先,电机处于正常运行状态,在12.5 s 时通过断开B、E两相进行故障模拟,同时切入容错算法I。
22.5 s时切入容错算法II,28 s 时切入容错算法III。通过实验结果可以看出,相隔两相故障采用容错算法III时,q轴电流脉振幅值缩小为容错算法I时的1/3,d轴电流脉振幅值缩小为容错算法I时的1/5。
4.4 故障归一化实验验证
依次断开C、D两相绕组进行全连通实验验证,实验结果如图9 所示。

图9 故障位置归一化实验验证
首先,电机处于正常运行状态,在37.8 s 时通过断开C相绕组模拟单相开路故障,并在52.8 s时断开D相绕组模拟相邻两相开路故障。
实验中,波形从上至下依次为d 轴电流、q 轴电流、B相电流和E相电流。
实验结果表明,容错算法可以实现平滑切换,因而提出的故障归一化容错控制算法是可行的。
5 结束语
本文针对五相永磁电机的不同故障类型,提出一种故障归一化低转矩脉动容错控制方法。研究五相永磁电机开路故障时二次、四次谐波转矩脉动产生的机理,提出基于双谐振控制器的五相永磁电机谐波注入算法。同时,提出了用于相电流、转子位置和脉宽调制占空比的旋转变换方法,简化了容错控制算法。实验结果证明了理论分析的正确性和控制策略的有效性,所提出的故障归一化低转矩脉动容错控制方法在高可靠连续运行领域具有良好的应用前景。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
家教世界(2023年25期)2023-10-09 02:11:56
中国特种设备安全(2022年3期)2022-07-08 02:21:56
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
建材发展导向(2021年7期)2021-07-16 07:07:28
青年歌声(2019年2期)2019-02-21 01:17:36
阅读(低年级)(2018年5期)2018-05-14 15:47:44
知识经济·中国直销(2017年11期)2017-11-28 05:34:13
中国公路(2017年16期)2017-10-14 01:04:46