永磁同步电机转子位置信息控制技术分析
2024-04-07 06:39王宏宇
防爆电机 2024年1期
王宏宇
(中国石油大庆石化公司,黑龙江大庆163000)
0 引言
永磁同步电机无需励磁电流,没有励磁损耗,降低了制造成本,同时没有集电环和电刷,提高了电机的可靠性,随着稀土技术快速发展,电机的效率和功率密度都得到了大幅度提高。中国拥有丰富的稀土资源,所以中国在稀土永磁同步电机的制造上具有很大优势。为了进一步扩展电机应用领域,调速系统的性能已成为研究热点,因此,本文开展对位置、速度传感器控制技术进行分析研究。
1 国内外研究现状
永磁同步电机控制理论从1950年开始形成并发展,经过全球范围内的深入探索和研究,现在已经形成了一些主要的控制方法。首先是恒压频比控制策略,这是一种保持电压与频率的比值恒定的控制方法。这种方法相对简单易行,但因为其不包括电流环和速度环,所以导致控制精度不高,动态响应特性和抗扰能力也较差。因此,这种控制方法通常应用于对精度要求不高的场所,例如风机等。
其次,矢量控制于70年代初被提出来,最初的开发目的是扩大调速范围,专为高性能电机所设计[1]。后来,由于与交流电机的完美配合,矢量控制在满足系统性能要求的同时,还能降低能耗和成本,逐渐引起了业界的关注并得到了发展至今。最后,直接转矩控制于1985年被提出。与矢量控制相比,直接转矩控制省略了d-q轴坐标变换,仅需要控制定子磁链大小和转矩角。它的优点是不需要调制技术,但缺点是频率不固定,稳态性能一般[2]。
无位置传感器控制策略是从1983年开始的,并逐渐发展为各种控制方法,其中有旋转高频电压注入法、脉振高频电压注入法、磁链估算法、全阶状态观测器、滑模观测器算法、扩展卡尔曼滤波器算法等。
2 矢量控制仿真模型
永磁同步电机的分类方式取决于永磁体的安装位置,分为表贴式和内嵌式两种。表贴式电机见下图,该电机转动惯量较低,调速性能较好,因制造工艺较成熟,因此成本不高,因此在传统制造业应用非常广泛。而内嵌式电机永磁体则嵌入在转子内部,该结构决定电机具有更宽的调速范围。但制造工艺相对复杂,极数多时,磁阻转矩大。为此,本文将研究表贴式永磁同步电机控制技术。
以4极电机为例,不计磁滞、涡流、和铁的损耗,忽略谐波、绕组间的互相感应、齿槽的转矩等,永磁同步电机电压方程见式(1)。
(1)
磁链方程见式(2)
(2)
可得电磁转矩方程如下
Te=-pnψf[iAsinθ+iBsin(θ-120°)+
iCsin(θ+120°)]
(3)
运动方程见式(4)
(4)
通过磁链和电磁转矩进行降阶和解耦方法,得出两个直流分量,这两个量不随时间变化,这种方法为矢量控制。它能够将复杂三相电机控制问题变得简单化,易于理解,且效率高。
电机感抗为8.5mH,阻抗2.87Ω,转动惯量0.001k g·m2,阻尼系数0.008Nms。搭建电机矢量控制仿真模型见图2。
矢量控制的一种基础方法是id=0,这种策略不需要考虑励磁电流以及去磁效应。电磁转矩仅受转矩电流分量调控,因此转矩脉动较小。其优势包括宽的调速范围、计算需求低等,它主要应用于高精度设备。不过,这种控制方法的缺点是,负载变动会造成定子电流变动,并使逆变器容量增大,所以它主要适用于小容量调速装置。
永磁同步电机转速阶跃仿真结果见图3、图4,从图中可以看出,转速从500r/min跳到1000r/min用时0.02s,电机电流起动电流为28A,起动时间0.02s,电磁转矩见图5,同理,从1000r/min降到500r/min过程也是同样结果,因此在跃阶过程中,机基于id=0的控制策略,系统的动态跟踪较好。
3 转子位置评估
电机在恶劣工作条件下,传感器可靠性大幅度降低,1989年美国科学家提出状态观测器,用于估算转子位置,起初这是一个恒等状态观测器,后期各国科学家提出其他低速和中高速电机无位置传感器控制策略。为解决传动状态观测器动态响应差问题,先进行传统状态观测器位置信息评估,再研究将二阶扩展为高阶线性系统,分析高阶扩展状态观测器特性。
3.1 传统状态观测器下位置信息估计
开环状态观测器见图6,通过状态观测器可以测出转子位置,由电压方程可得出状态方程式(5),进而求出电流误差动态方程式(6)。其中K1和K2越大,就会给电机造成噪声,带来不利影响。
(5)
(6)
转子位置信息获得是在此基础上加一个低通滤波器,这样对上式求反正切函数,从而得出转角和转速信息,见式(7)、式(8)。
(7)
(8)
在对精度要求非常高场所,需要对角度进行补偿,但是转速和角度会有严重滞后,若不补偿,随着转速变大,两者滞后也同样扩大,导致整体性能下降。
3.2 改进后位置评估
高阶状态观测器是将二阶方程进行扩展,见式(10)
(9)
高阶观测器结构图见图7。
与传统传统状态观测器计算方式相同,可得出转子位置见下式。

(10)
对角度角度进行补偿,得到转子位置如下
(11)
改进后搭建永磁同步电机矢量控制结构图见图8,仿真不同情况下电机性能。
3.3 结果分析
测试电机在相同额定负载情况下,300r/min和1500r/min稳定运行时,电机反电动势和转子位置曲线,结果见图9和图10,从图9可以看出,低速时,改进后高阶观测器的方法测到的反电动势有波动,图10显示高速时,反电动势无波动情况,位置误差估算几乎为零,这是因为低速反电势值较低,而电流测量误差和传感器中逆变器非线性对电势值影响较大,导致曲线抖动,因此,对比之下,改进后高阶观测器的方法对于高速范围测量更准确。
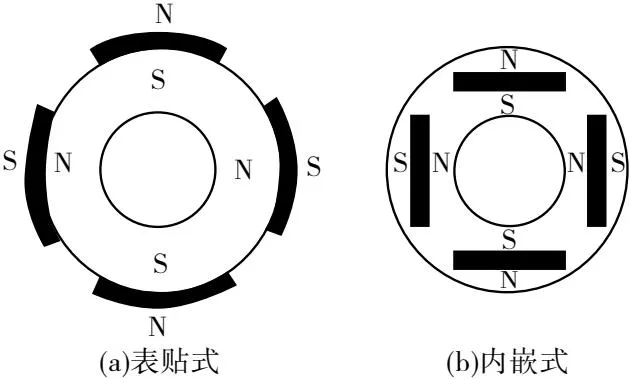
图1 永磁同步电机
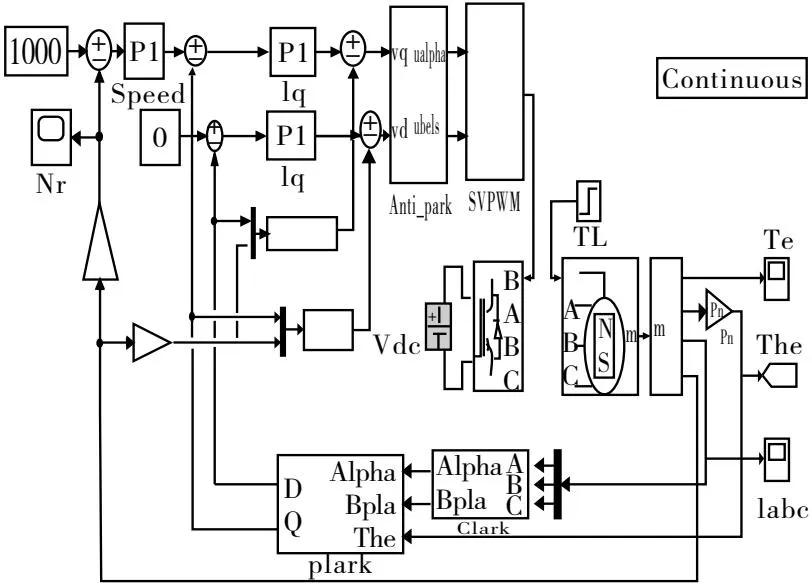
图2 仿真模型
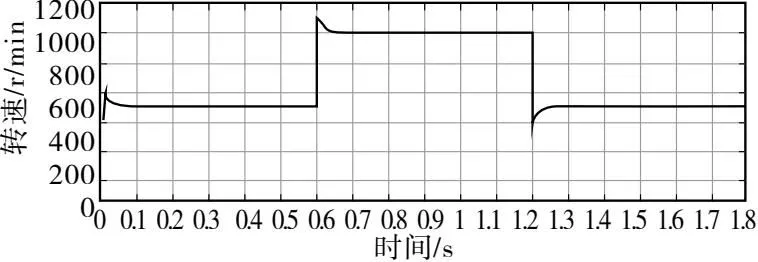
图3 转速波形
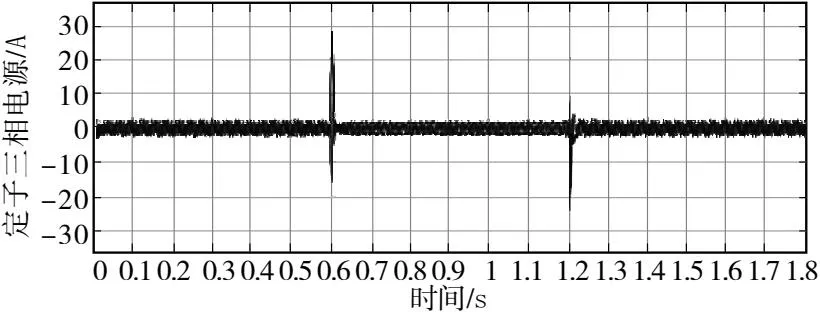
图4 电流波形
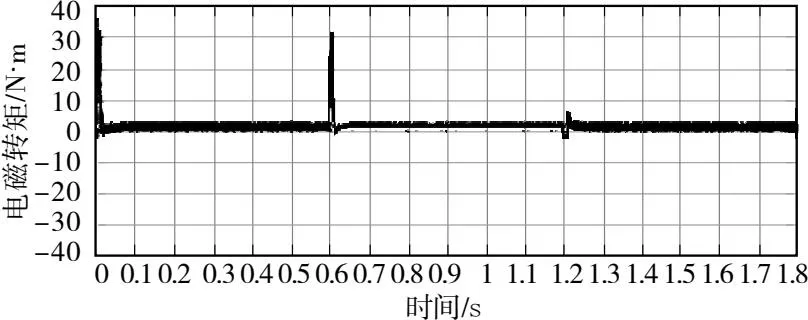
图5 电磁转矩波形
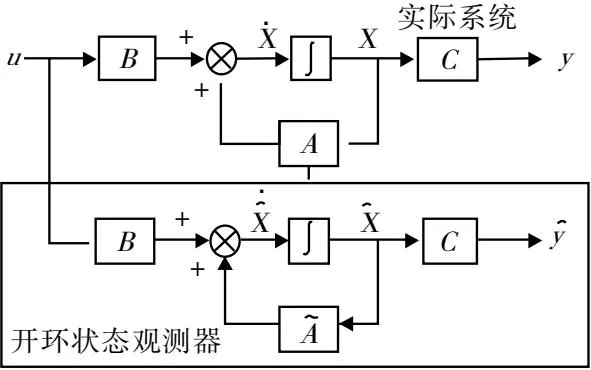
图6 观测器
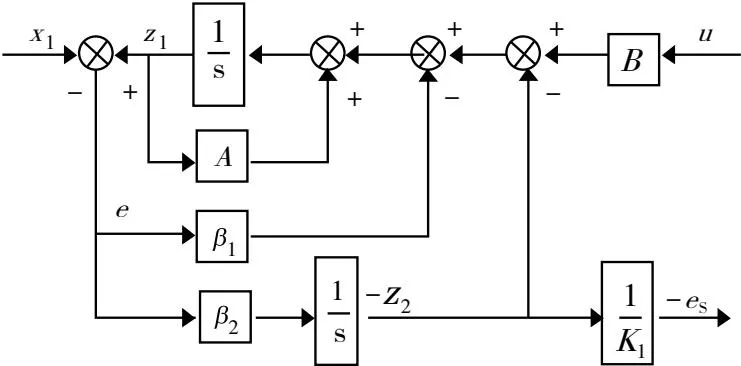
图7 高阶观测器
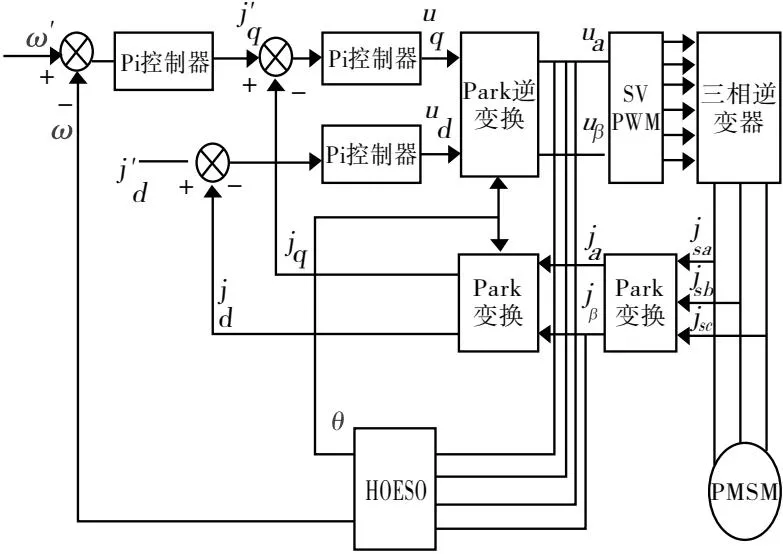
图8 矢量控制结构图
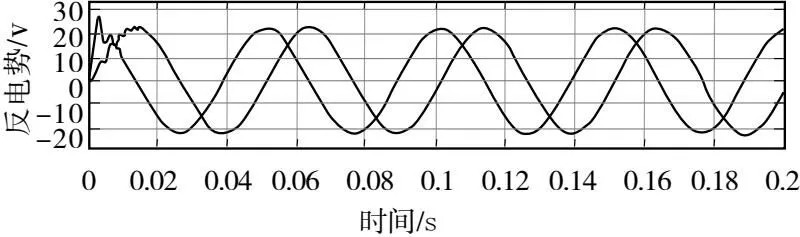
图9 额定负载低速情况下电机运行情况
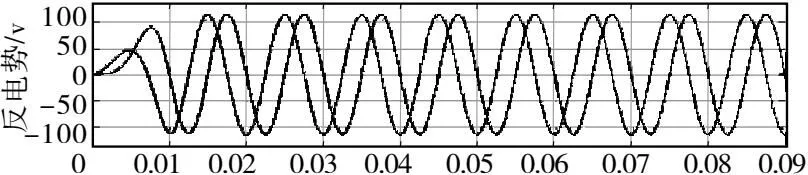
图10 额定负载高速情况下电机运行情况
测试电机在空载情况下,从1500r/min调速至2500r/min时电机调速性能,对比传统状态观测器和改进后高阶观测器电机转子位置估计误差,见图11和图12,改进后高阶观测器得到的转子位置估计误差能更快收敛。
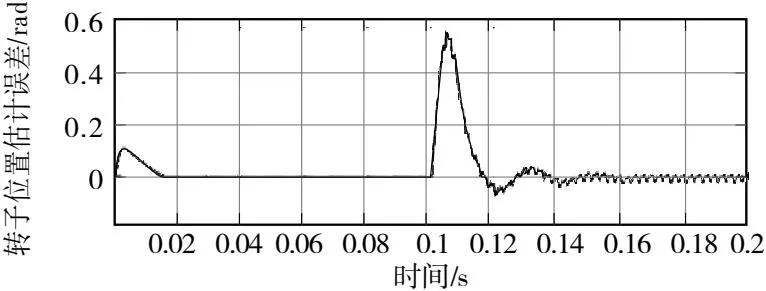
图12 改进后高阶观测器转子位置误差
测试电机的抗干扰性能,起动时,额定负载为6Nm,转速为1200r/min,运行0.05s,负载增加到12 Nm,运行到0.12s,再将负载降低6Nm,仿真传统状态观测器和改进后高阶观测器下,转子转速和位置曲线变化,结果见图13和图14。
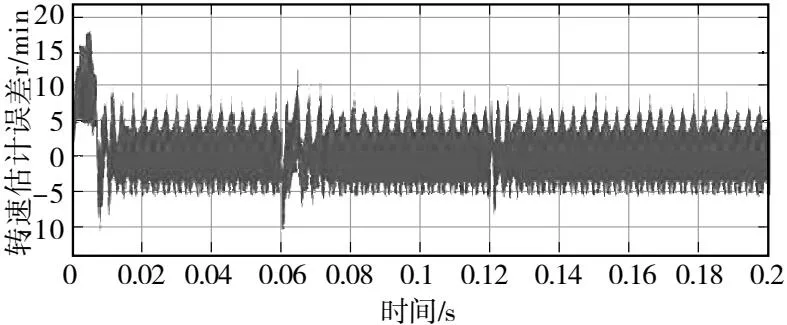
图13 传统状态观测器转子运行情况
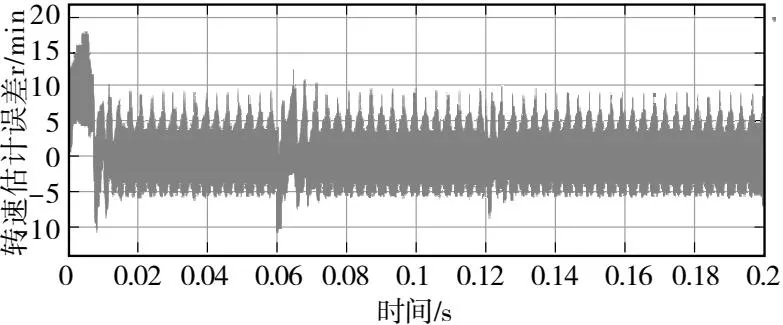
图14 改进后高阶观测器转子运行情况
图13和图14对比发现,改进后高阶观测器转子转速无论是负载增加,还是负载降低,转子转速都比传统状态观测器转子更快恢复到稳定运行,同时,转子位置误差在负载波动时,也能较短时间恢复,误差波动传统状态观测器转子为0.05rad,而改进后高阶观测器转子为0.03rad,误差变化更小。
4 结语
本文从4极永磁同步电机控制技术国内外研究现状调查分析,通过矢量控制仿真模型建立,通过传统状态观测器转子位置信息数学推导和仿真,建立改进后高阶观测器转子位置信息数学模型,对比分析传统状态观测器和改进后高阶观测器仿真结果,获得改进后评估结果更为准确,为后期进一步改进提供了数学模型和仿真数据。
猜你喜欢
数学物理学报(2021年1期)2021-03-29
数学物理学报(2020年6期)2021-01-14
防爆电机(2020年6期)2020-12-14
哈尔滨轴承(2020年1期)2020-11-03
数学物理学报(2018年5期)2018-11-16
光学精密工程(2016年3期)2016-11-07
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
大电机技术(2015年5期)2015-02-27