空间站组合臂安装载荷的自主安全操控策略
2024-03-30 10:53:32刘冬雨刘宏刘业超谢宗武高升
宇航学报 2024年2期
刘冬雨,刘宏,刘业超,谢宗武,高升
(1.北京空间飞行器总体设计部,北京 100094;2.哈尔滨工业大学机器人技术与系统全国重点实验室,哈尔滨 150001)
0 引言
中国空间站在轨建造完成后,将开展较大规模系统和连续的空间科学研究与空间应用。绝大多数空间应用和技术试验载荷设备通过机械臂实现进出舱以及舱外位置转移、安装和拆卸[1-2]。机械臂安装和拆卸载荷设备是空间站载荷照料的关键操作,区别于机械臂转移航天员等常规操作,这是一类接触操作任务。如何有效控制插合力大小,既满足克服插接载荷的阻力、适应在轨位姿偏差,又能够有效保证机械臂受力时间短、不超过机械臂自身耐受载荷,是机械臂安装载荷任务的关键。
国际空间站有效载荷操作主要通过加拿大2臂(Canadarm 2)或者日本臂(JEM-RMS)完成。这两套机械臂系统实现载荷操作的主要工作模式为航天员人在回路的闭环操作,由航天员通过舱外视频信息、遥测驱动的三维模型重构信息,克服天地差异、舱体充压等带来的机械臂操作误差等影响,对载荷进行准确定位,最终完成载荷安装部署[3-4]。这种操作方式需要为航天员提供较为丰富的舱外视频和较为精细的三维位置信息,也需要航天员具备较高的机械臂操控水平和大量的地面训练。
经过多年研究和工程实践,中国空间机械臂操控技术积累了一定的理论基础和工程经验,主要包括力位混合控制方法、阻抗控制方法、力控制方法[5]。空间机械臂采用力位混合控制在轨更换ORU(Orbital replaceable units)的方法较适用于能够对接触操作环境准确建模的任务场景,且设置合理的加权选择矩阵才能保证操作性能,工程实践中鲜见应用[6]。阻抗控制用于调整机械臂末端位置和接触力的动态关系,实现了自由空间和接触空间的稳定过度,同时保证了接触操作的柔顺性能和自由空间运动位置精度,在对于力跟踪精度要求不高的任务场景(如月壤采样、卫星捕获)中得到了广泛应用[7-8]。力控制由于能够获得较好的力跟踪效果,其理论及试验研究在地面机器人精细操作领域较为广泛,但在目前成功在轨飞行的空间机械臂精细操作任务中未见应用和实施报道。
中国空间站已进入应用与发展阶段,对于空间机械臂大规模安装和照料舱外暴露实验载荷也需要逐步积累技术基础和工程经验。为了减少航天员在轨操作的人时需求,降低机械臂操控对空间站资源需求,提高自动化水平,本文针对空间站舱外暴露载荷安装任务,提出一种空间机械臂插拔载荷的自主安全操控策略。经过地面验证和在轨实施,该策略成功完成了空间站首次载荷出舱和组合臂安装操作任务,为后续在空间站大规模开展空间应用和技术试验奠定了基础。
1 任务方案
中国空间站由天和核心舱、问天实验舱和梦天实验舱3个基本舱段组成,呈T字构型。天和核心舱居中,问天实验舱和梦天实验分别连接于两侧。天和核心舱配置了一台7 自由度的大机械臂,作业半径为10 m,最大负载25 t,主要负责大负载大范围转移;在问天实验舱配置了一台7自由度的小机械臂,作业半径为5 m,最大负载3 t,主要负责小负载精细操作[9]。大/小机械臂还可以串联形成组合臂,主要执行支持航天员出舱活动及舱外载荷的大范围操作任务。安装在空间站舱外的设备(含舱外载荷)主要通过梦天实验舱货物气闸舱实现自动进出舱[10-11]。
空间站组合臂操作舱外暴露载荷任务主要包括任务准备段、载荷出舱段、机械臂操作段、载荷自检及状态恢复段4个阶段:①任务准备段主要完成空间站各设备加电设置,组合臂运动至梦天实验舱货物气闸舱附近,航天员将出舱载荷安装在载荷转移机构上并关闭货物气闸舱舱门。②载荷出舱段主要完成货物气闸舱泄压,开启梦天实验舱外舱门,载荷转移机构携带载荷伸出舱外。③机械臂操作段主要完成小机械臂运动及捕获载荷组件(如图1(a)所示),载荷与载荷转移机构分离,小臂携带载荷后退至安全位置,大机械臂携带小机械臂和载荷大范围转移载荷至问天实验舱上方。运动到位后,大机械臂作为小机械臂的基座锁定,小机械臂视觉伺服运动至插合载荷位置,小机械臂进入自主流程力控制插合载荷(如图1(b)所示),在小臂零力控制状态下载荷适配器锁紧载荷[12]。④载荷自检及状态恢复段主要完成载荷在轨测试,载荷转移机构缩回至货物气闸舱,梦天实验舱外舱门关闭,货物气闸舱回温复压,完成系统状态恢复。
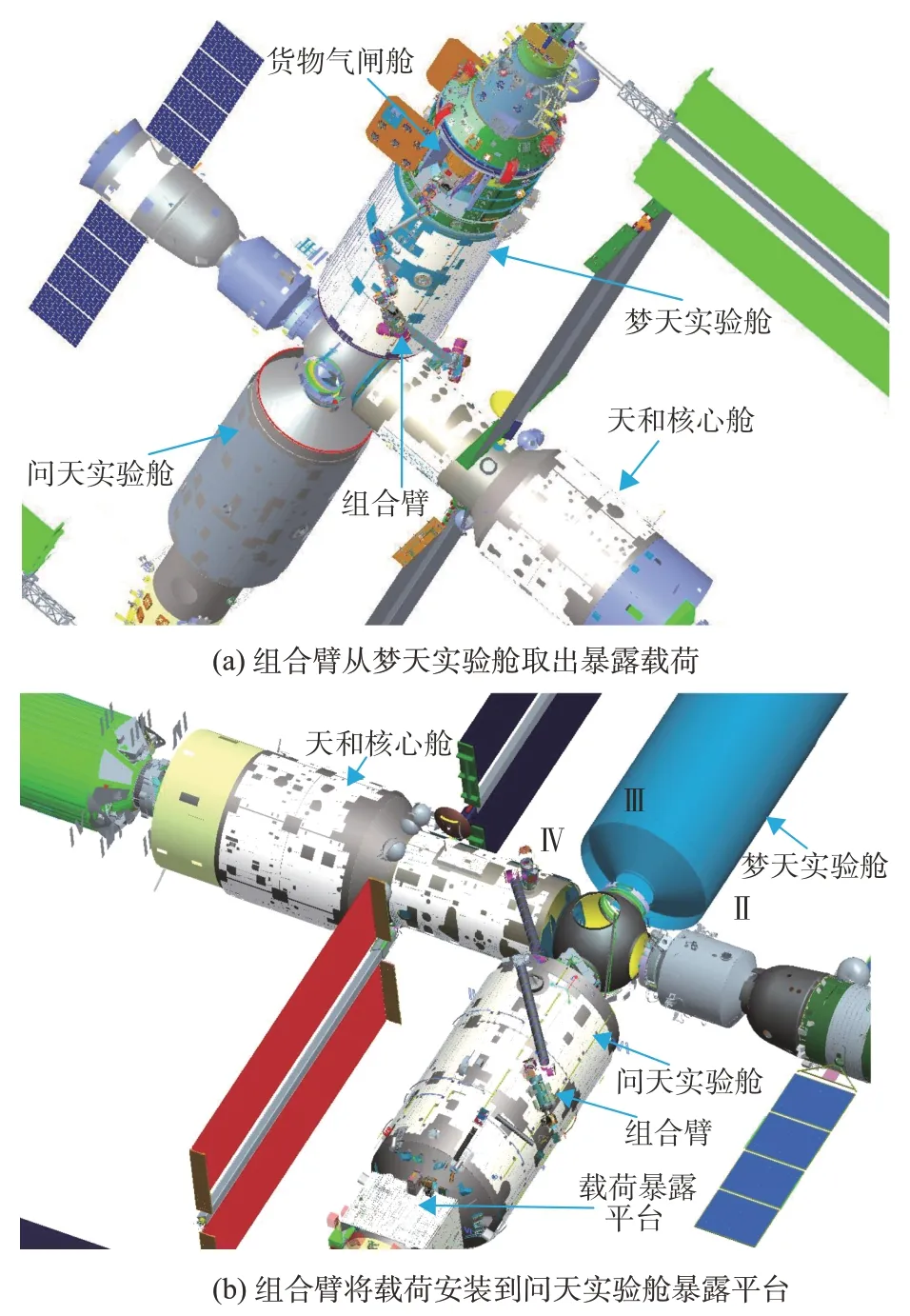
图1 组合臂安装暴露载荷Fig.1 Macro-micro manipulator assembling exposed payloads
组合臂以核心舱小柱段为基座,从梦天实验舱载荷转移机构上抓取出舱载荷,直接转移到问天实验舱上安装载荷,其跨距超过25 m,充分体现了空间站机械臂自主大范围转移安装载荷的优势,减小了航天员出舱活动的代价,系统提升了空间站和航天员的安全性。
2 操控策略
2.1 任务分析
2.1.1 尺寸链分析
首先分析组合臂负载载荷后开环操作任务尺寸链[13]如图2 和式(1),操作的误差环节包括:①机械臂基座与舱体之间的连接误差;②组合臂开环末端绝对误差;③末端捕获载荷的连接误差;④各传递环节由于上一环节姿态误差和本环节长度尺寸诱导出的牵连位置误差,这一因素往往成为空间宏-微机械臂开环操作存在的主要误差项。
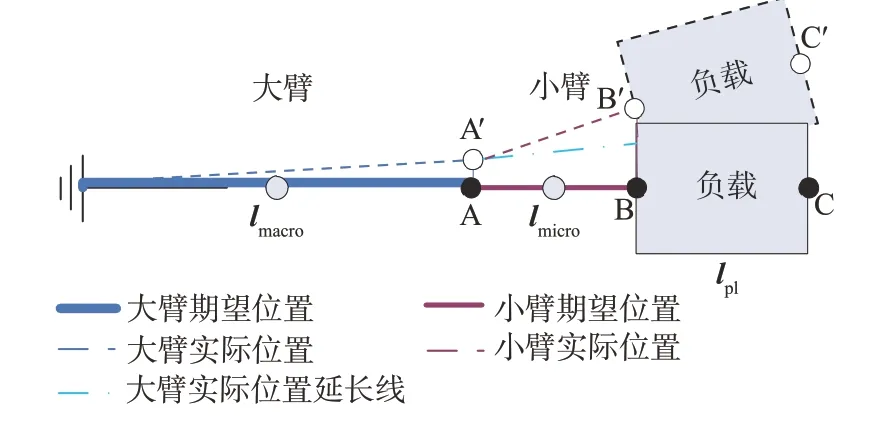
图2 组合臂操作载荷末端精度简化分析Fig.2 End accuracy simplified analysis of macro-micro manipulator operating payloads
式中:δs∈ R3为机械臂操作末端综合位置误差,δbase∈ R3为机械臂基座/末端捕获连接位置误差,δamacro∈ R3为大机械臂末端绝对位置误差,δamicro∈ R3为小机械臂末端绝对位置精度;Δs∈ R3为机械臂操作末端综合姿态误差,Δbase∈ R3为机械臂基座/末端捕获连接姿态误差,Δamacro∈ R3为大机械臂末端绝对姿态误差,Δamicro∈ R3为小机械臂末端绝对姿态误差;lpl∈ R3为载荷尺寸,lmacro∈ R3为大机械臂跨距,lmicro∈ R3为小机械臂跨距。
按照组合臂工况估算机械臂开环操作末端误差,考虑大臂完全伸直10 m、小臂完全伸直5 m构型、1 m有效载荷,按照国际空间站机械臂假定大臂绝对位置误差50 mm、大臂绝对姿态误差1°,小臂绝对位置误差10 mm、小臂绝对姿态误差1°,忽略捕获连接误差环节。估算末端横向位置误差可达到142 mm,这将导致载荷与空间站舱体之间的连接机构的容差设计很难实现。因此,在机械臂末端或者连接环节设置视觉感知装置是非常必要的。
在机械臂末端加装末端相机,组合臂抓取目标物体后,通过切换载荷相机镜头,利用相机测量相对位姿,机械臂控制器通过控制末端的位姿满足载荷适配器的捕获对接条件,将机械臂开环操作中传递环节的误差消除,整臂视觉闭环的误差尺寸链变为:
式中:δrmicro∈ R3为小机械臂末端重复位置误差,δcamera∈ R3为相机测量位置误差;Δrmicro∈ R3为小机械臂末端重复姿态误差,Δcamera∈ R3为相机测量姿态误差。
若相机测量误差2 mm/0.2°,则载荷末端的位置误差可小于20 mm。这样在系统层面将极大地简化载荷与舱壁之间连接装置的设计要求,优化了空间站系统整体的资源配置。
视觉伺服定到位的位姿误差对于载荷安装这种接触操作是不能忽视的,较大的视觉伺服误差以及载荷与安装位置之间较大的接触刚度会对机械臂产生较大的反作用约束。因此,在视觉伺服到位后,载荷对接捕获过程还需要设计合适的机械臂柔顺操控策略才能顺利安全地完成安装任务。
2.1.2 宏-微机械臂动力学耦合分析
空间站组合臂是一种典型的空间宏-微机械臂,其优势是有效操作空间半径大,能够覆盖货物出舱口、载荷安装位置,极大地提高空间站载荷操作的效率;同时,这种使用模式也带来了整臂刚度低的局限性。如果不加以控制和规避,安装载荷期间整臂末端的作用力可能导致整臂变形后退,甚至导致操作任务无法完成的风险。
在操作任务确定后,大机械臂(7 自由度)和微机械臂(7 自由度)的初始操作构型能够明确,可通过1 个冗余自由度的自运动特性,遍历全部可能操作构型,分析微机械臂插合载荷主动出力过程对宏机械臂作用及其变形影响。
考虑到刚性机械臂末端期望位姿x仅与关节刚性运动q有关,与机械臂系统柔性变形无关,即:
式中:x∈ R6为机械臂末端在惯性空间的位姿;q∈ R7为关节的刚性角度向量。将上式对时间求导:
式中:J=为刚性机械臂雅可比矩阵。对于冗余度机械臂,将上式对时间t求导,可得的通解为:
式中:J+为J的广义逆矩阵,J+=JT(JJT)-1;ε∈ R7为任意矢量矩阵;I∈ R7×7为单位阵。
式(5)等号右侧第二项中I-J+J为雅可比矩阵J的零空间,通过调节ε控制机械臂自运动。
合理假定J+为满秩矩阵,则ε只有1 个冗余自由度,即ε的所有元素不是独立的。使用奇异值分解(SVD),可以将列向量ε变换为代数形式关系。雅可比矩阵J的奇异值分解可以表达为下式:
式中:P∈ R6×6,Q∈ R7×7为酉矩阵;Q1∈ R7×6为次酉矩阵;S∈ R7×1;σ∈ R6×6,其对角线元素为雅可比矩阵J的奇异值。根据酉矩阵P和Q的正交特性,雅可比矩阵J的广义逆J+和雅可比矩阵J的零空间I-J+J可以改写为式(8)和式(9):
由于矩阵Q的7 个列是实数空间R7的基,ε可以写成Q1的6列和S的1列的线性组合,如下式:
式中:β为6×1 列向量;α为自运动系数(本文机械臂冗余度为1)。
这样,式(5)等号右边第二项可以简化为:
因此,当末端位姿不变时,自运动过程可改写为:
按照式(12),对初始构型确定后的1 个冗余自由度的宏机械臂进行构型遍历,仿真结果如图3所示。
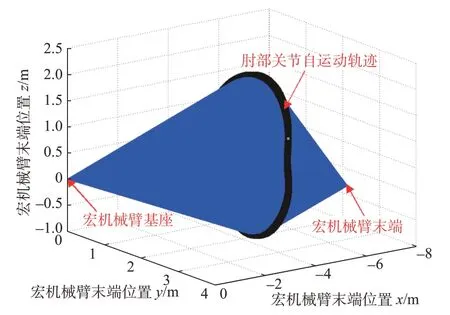
图3 宏机械臂操作构型调整仿真算例Fig.3 Simulation example of operation configuration adjustment for macro manipulator
空间机械臂关节变形为末端变形的主要部分,其中绕关节回转方向的刚度相比其他方向低1个量级,因此主要考虑关节回转方向刚度。宏机械臂在作为基座时,关节力矩与关节变形关系如下:
式中:τ∈R7为宏机械臂关节力矩向量;Δq∈ R7为宏机械臂由于关节力矩产生的关节变形向量;Kq=diag(kq1,kq2,…,kq7)为关节刚度矩阵。
由力雅可比定义τ=JT(q)F,有下述关系:
为得到机械臂末端坐标系在外力作用下的变形Δx,上述公式中的J(q)均为相对机械臂末端坐标系的雅可比矩阵。上式中Kq-1为关节柔度矩阵。
令方阵C(q)=J(q)Kq-1JT(q)为机械臂末端柔度矩阵,用以表示在操作空间的广义力F∈ R6和广义变形δ∈ R6之间的线性关系,即:
代入大机械臂关节刚度,对应大机械臂初始构型下的自运动轨迹,可以获得大机械臂绕虚拟臂角平面旋转360°条件下的机械臂末端z方向1 N 操作力的变形量,如图4所示。从图中发现,在大机械臂末端z方向施加1 N 作用力,沿着大臂末端坐标系三个方向的变形量在0~20 mm 之间。这对于小臂恒力输出插合力造成一定程度的影响。
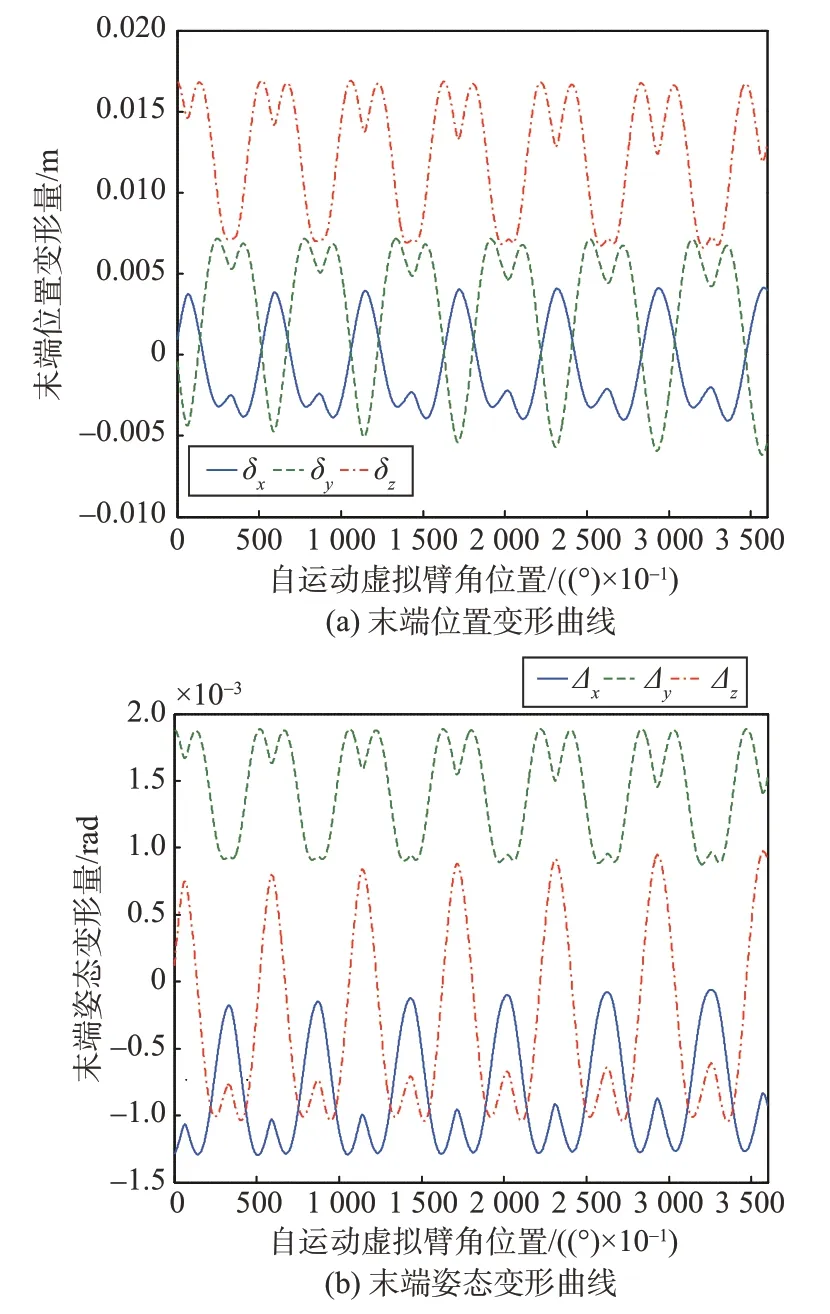
图4 沿z方向单位力的末端变形量Fig.4 End deformation under unit force along z direction
从理论角度可以通过选择大机械臂构型降低或减弱末端特定方向受力引起的变形量,从而减小对小机械臂的操作影响。但从工程实践角度,首先采用自运动调整优化有限;其次,一般会对作为基座的大机械臂的构型通用设计,即不同任务大机械臂支撑构型固化、小机械臂进行构型设计调整。因此,设计合理的小机械臂插接载荷的控制模式、降低宏微机械臂之间的动力学耦合是极为关键的。
2.2 自主安全操控策略
本文提出的空间机械臂插拔载荷自主安全操控策略,以视觉伺服引导机械臂进入载荷连接机构对接初始条件、以力控制克服初始偏差引起的阻力实现载荷连接机构捕获、捕获后机械臂自主卸载作用力实现整臂操作安全,流程如图5所示。
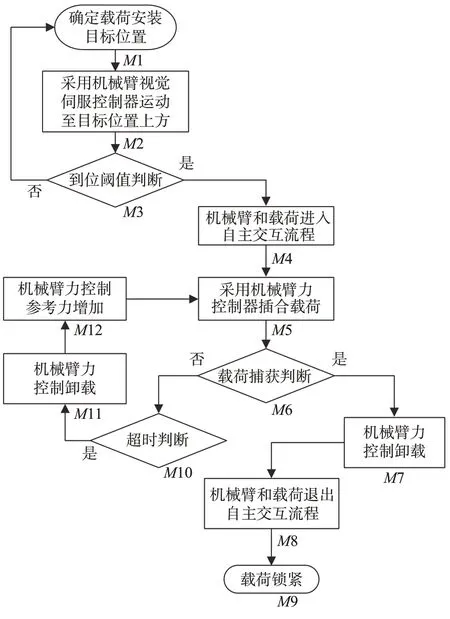
图5 组合臂安装载荷自主安全操控的总体流程Fig.5 Autonomous and safe operation overall flow of macro-micro manipulator assembling payloads
2.2.1 视觉伺服初定位
在确定载荷安装目标位置和姿态后,机械臂以开环运动方式粗定位至安装载荷上方,然后采用视觉伺服闭环控制如图6所示,运动至载荷目标安装位置前方,消除开环运动可能引入的基座误差、大机械臂绝对误差、小机械臂基座端捕获连接误差及各环节姿态误差引起的牵连误差,确保进入载荷适配器的对接初始条件。视觉伺服闭环控制的参考输入为载荷目标位姿Pref∈R6,即控制机械臂末端初始期望解析点FPL=Pref,然后通过机械臂末端相机载荷镜头测量感知获取相对Ftarget的实际位姿Pprac∈R6,通过每个周期的闭环控制使得FPL-Ftarget∈D±ξ。在机械臂载荷相机测量得到视觉闭环到位误差满足ξ设置指标后,视觉闭环控制自动退出至伺服待机状态。其中,理想对接初始条件D=[d,0,0,0,0,0]T,根据载荷连接机构设计状态,一般只在载荷前进方向d不为零;对接初始条件容差范围ξ=[δ,δ,δ,Δ,Δ,Δ]T,一般载荷横向位置容差δ和姿态容差Δ分别设置。
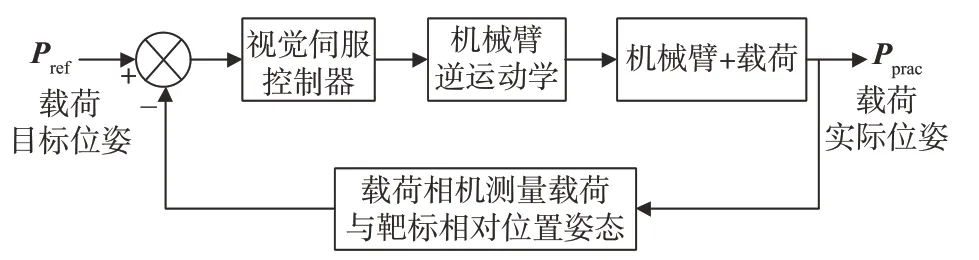
图6 机械臂视觉伺服控制框图Fig.6 Block diagram of visual servo control for manipulator
2.2.2 力控制自适应插合载荷
机械臂力控制器框图如图7 所示,建立安装载荷过程机械臂与环境交互动力学模型如下[14]:
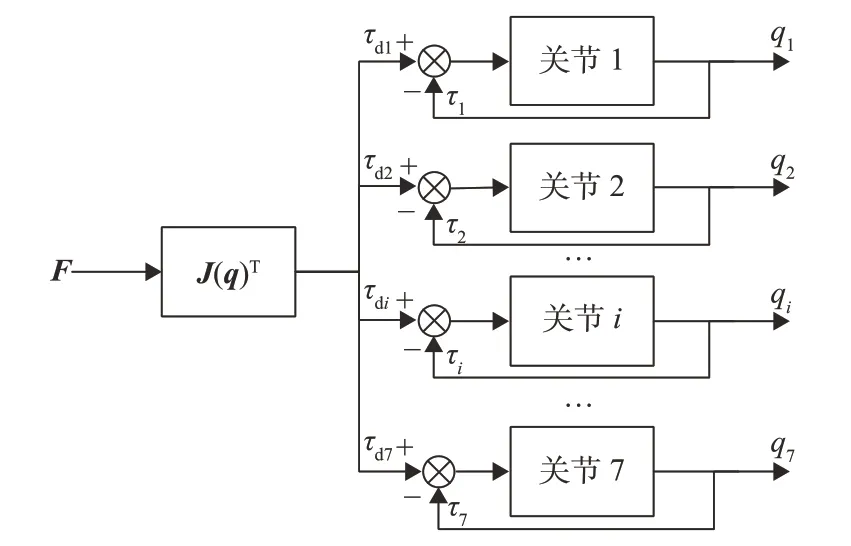
图7 机械臂安装载荷力控制框图Fig.7 Block diagram of force control for manipulator assembling payloads
式中:M(q)为惯量矩阵为多自由度运动耦合的非线性项;重力项g(q)在空间微重力环境中恒为零;作用在机械臂末端的接触力向量Fe通过JT(q)折算到关节空间;u为关节控制向量。
整臂采用改进逆动力学控制律,具有如下形式:
式中:aq和F分别为加速度的外环控制量和机械臂末端期望力。
式中:Md,KP,KD为通过力控制后机械臂对操作环境表现的质量矩阵、阻尼矩阵和刚度矩阵;xe表征操作空间的虚拟期望位置与实际位置之间的跟踪误差向量;xF=CF(F-Fe)表征操作空间与力误差相关的参考向量,其中CF为具有柔量含义的对角阵,该矩阵给出了机械臂沿操作空间期望方向执行的控制作用。
联立式(16)~(18),可得到机械臂安装载荷过程接触力控制的闭环系统方程:
将机械臂采用力控制插合载荷过程简化为经典的轴孔装配模型考虑。若在沿插合方向x设置一个常值正期望力Fx,其余方向设置的力和力矩期望值尽可能小。则上述闭环系统方程表现为下述控制效果:
1) 在机械臂插合载荷主被动端接触捕获前:接触力Fe在前进方向x上的分量很小、接近为零,机械臂末端会控制载荷继续朝着期望的插合方向运动;其余方向上由于期望力/力矩为零,即使存在接触力作用,机械臂会通过关节力控制作用,朝向减小作用力的方向运动,自适应的调整残余位姿偏差。
2) 在机械臂插合载荷主被动端接触后、捕获前:由于机械臂无法继续沿插合方向x前进,系统在力控制作用下使得xF逐渐增加,最终控制接触力Fe与期望力F平衡。
按照上述控制策略,在视觉伺服到位退出后,分别对机械臂和载荷发送指令,控制机械臂和载荷进入自主交互流程。载荷开始持续判断载荷连接机构上的捕获传感器状态,通过逻辑组合判断,若满足捕获判据,则向机械臂发送“载荷捕获”信号;机械臂持续查询载荷发送来的“载荷捕获”信号,若收到载荷捕获信号则通过软件为机械臂力控制线程发送卸载指令。
机械臂力控制插合载荷期间,机械臂中央控制器通过力雅可比将末端期望力F=[Fx,Fy,Fz,Tx,Ty,Tz]T∈R6分解为各关节期望力矩τ=[τ1,τ2,…,τ7]T∈R7,在关节控制器处进行力矩闭环控制。关节力控制采用关节力矩传感器数据进行力矩闭环。这里雅可比J(q)只和当前机械臂的构型q=[q1,q2,…,q7]T∈R7相关。
针对安装载荷插合方向的类型,通常将末端期望力F=[Fx,Fy,Fz,Tx,Ty,Tz]T设置为插合方向不为零,其余方向尽可能设置较小的模值。这样机械臂对接触环境表现为一种自适应调整的状态,即机械臂会沿着受到约束阻力小的方向,以期望的插合力对接载荷,可以较好地克服地面无法准确测量的误差环节(包括载荷被动端及靶标之间、载荷组件等的地面精测误差),在轨无法测量的误差环节(航天员在轨组装载荷的偏差及机械臂视觉伺服到位残差)以及无法建模的天地差异环节。该特性是组合臂安装载荷这一类精细接触操作任务的关键核心。
2.2.3 插合力自主卸载
按照自主安全操控策略总体流程,在机械臂力控制插合载荷、载荷捕获后,“载荷捕获”信号送机械臂控制器;机械臂控制器一旦得到“载荷捕获”信号,则立刻自动进行作用力稳定卸载,机械臂期望力设置为F=[0,0,0,0,0,0]T。按照闭环控制方程式(19),机械臂通过关节力控制器自适应调整虚拟期望跟踪误差xe,达到控制末端接触力卸载的效果。地面确认机械臂接触力卸载完成后,分别向机械臂和载荷发送指令,控制机械臂和载荷退出自主交互流程。载荷完成最后锁紧。
机械臂对外表现为期望为0 N 的力控制随动状态,对机械臂和载荷均进行了安全保护:①载荷一旦捕获,机械臂就不再持续进行主动力加载,减少机械臂受力时长、降低宏微机械臂之间的动力学耦合;②载荷捕获后,机械臂不再施加外力,尽可能减少机械臂对载荷的作用。
空间机械臂插拔载荷自主安全操控策略,由组合臂开环运动实现大范围转移、视觉伺服提供精细定位克服各项误差环节影响为机械臂安装提供良好的初始条件;由力控制自适应克服载荷安装位姿残差;由自主交互流程减少天地、机械臂与载荷交互时间、力控制持续时间,系统实现准确、自主和安全完成载荷安装任务。
3 地面验证
空间站机械臂规模大,无法在地面建立全三维物理验证环境,因此采用地面验证体系分解方法,对机械臂操作任务分解验证,如表1 所示。系统级/分系统级地面验证主要包括仿真验证和地面试验验证两部分内容。系统级验证主要聚焦在分系统间接口匹配性、飞行任务综合验证;分系统验证则聚焦在产品功能性能验证。仿真验证主要针对机械臂操作任务路径规划、动力学和控制算法正确性和性能指标验证。地面试验主要针对机械臂及操作对象的机电信息接口匹配性、飞行程序正确性进行验证。由于大型空间机械臂一般采用气浮平台作为试验环境,地面试验大多在二维平面条件下开展。
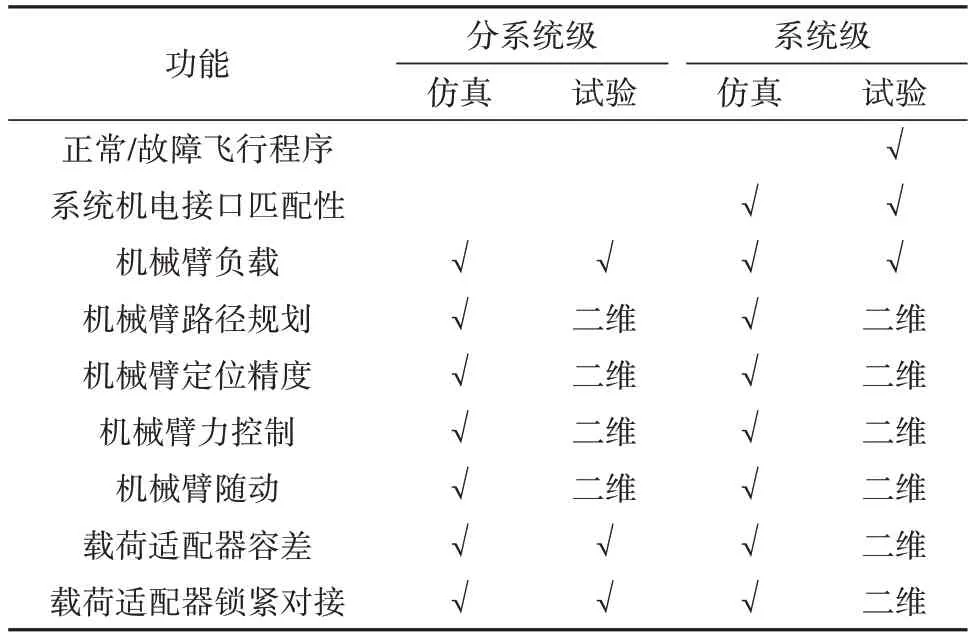
表1 组合臂操作载荷任务地面验证矩阵Table 1 Ground verification matrix for macro-micro manipulator operating payload task
3.1 仿真验证
在商用软件ADAMS 中建立空间站-组合臂-载荷系统动力学与控制联合仿真模型[15-16]。仿真初始状态设置为组合臂携带载荷由载荷适配器对接面距离500 mm位置(载荷适配器主被动端上下表面相距x=500 mm+108 mm=608 mm);并人为拉偏前进方向偏差x=30 mm、横向偏差y=15 mm,z=20 mm,模拟组合臂开环运动初始偏差。仿真结果如图8所示,仿真表明:
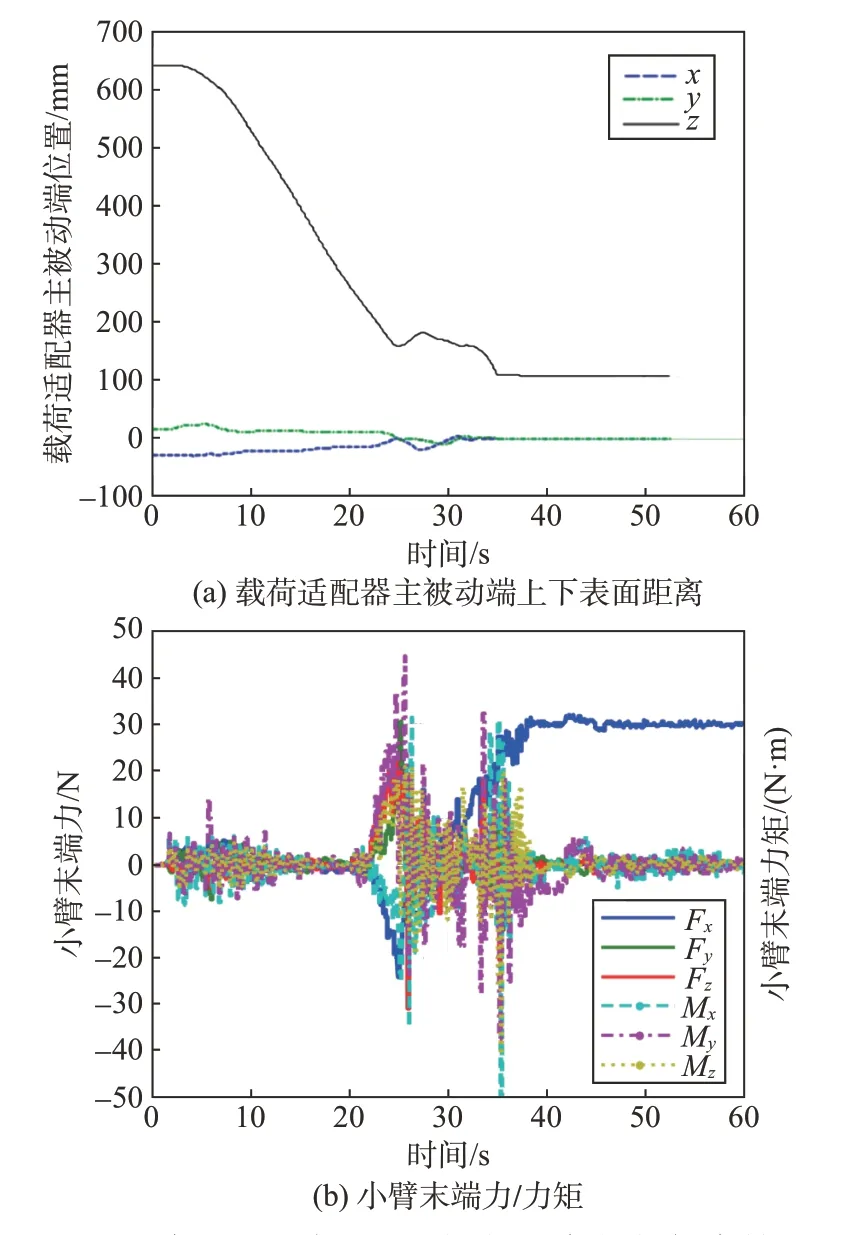
图8 组合臂视觉伺服+力控制插合载荷仿真结果Fig.8 Visual servo and force control insertion payload simulation results of macro-micro manipulator
1) 载荷适配器捕获状态下,被动端下底面到主动端上顶面距离108 mm。组合臂携带载荷由距离500 mm 位置(此时载荷适配器主被动端上下表面相距500 mm+108 mm=608 mm)开始运动,如图8(a)所示,运动过程的侧摆偏移在±15 mm 以内,约30 s后机械臂运动到位,横向偏差小于载荷适配器的±30 mm的容差范围。因此,载荷适配器主动端与被动端可以完成初始定位至对接初始条件。
2) 当小机械臂视觉伺服到位如图8(b)所示,小臂切换力控制,主动出力,克服可能受到的阻力包括:①捕获装置的阻力,②捕获检测装置的阻力,③导向机构的支反力、弹性变形力和摩擦力等,且有一定裕量。这里设置组合臂(小臂)末端期望力30 N 进行载荷适配器主被动端压紧,直至捕获机构捕获。小臂施力后约7 s,末端力达到设定值30 N,关节力矩及末端六维力和肩部六维力状态正常。小臂关节力矩小于150 N∙m,在小臂设计范围内。末端可以实现期望力稳态跟踪30 N。
3) 通过仿真还可判断小臂力控制对作为基座的大臂的作用,大臂末端位移和整臂末端位姿呈稳定状态。当小臂末端输出主动力稳定后,组合臂末端的位置和姿态也趋于稳定状态,且此时,小臂能够克服大臂位移影响,实现载荷适配器的插合。
3.2 试验验证
如图9 所示,在地面利用气浮平台搭建试验验证系统,在气浮台上平面布局大机械臂、小机械臂、载荷正样产品及其地面零重力工装(含气足、支撑支架等),在气浮台下设置模拟空间站暴露平台的模拟墙安装载荷适配器被动端以及气足的气源及其供气管路[17]。
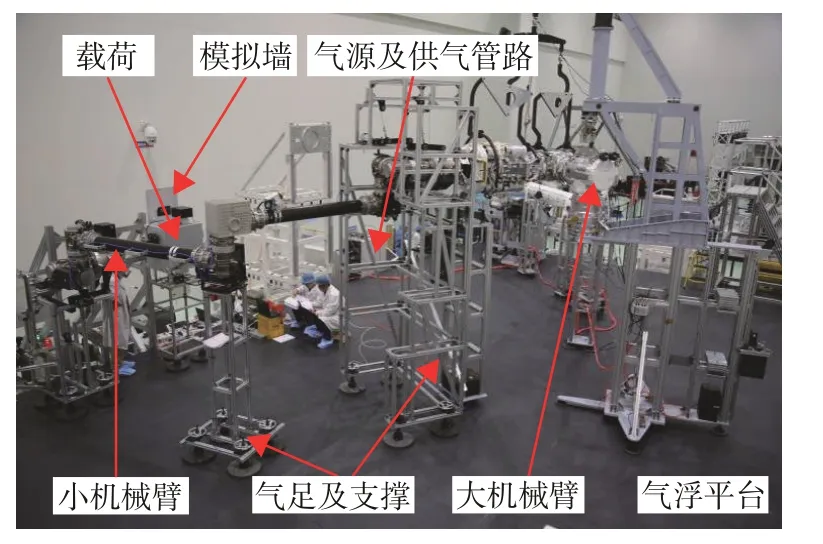
图9 组合臂操作载荷系统级地面试验Fig.9 System-level ground test of macro-micro manipulator operating payloads
利用地面电源、地面测试设备模拟空间站平台供电和指令发送及遥测接收,1∶1 验证了组合臂操作暴露载荷安装的正常/故障飞行程序、组合臂与载荷适配器和载荷接口的匹配性。
4 在轨实施
2023 年初,中国空间站首次在轨完成了载荷出舱及组合臂安装任务。梦天实验舱货物气闸舱载荷转移机构携带载荷伸出至舱外,组合臂通过视觉伺服捕获载荷,如图10(a)所示。组合臂以多关节联动方式,将载荷大范围转移至问天实验舱暴露平台上方。小机械臂视觉伺服运动至插合载荷位置,然后进入自主流程力控制插合载荷,如图10(b)所示。
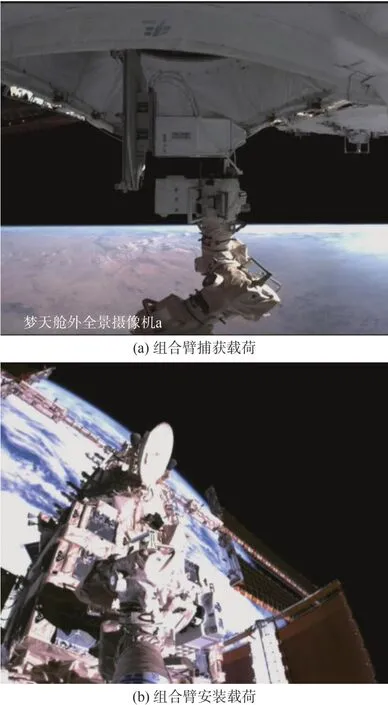
图10 组合臂在轨操作载荷Fig.10 Macro-micro manipulator operating payloads on orbit
组合臂状态下小臂通过载荷相机完成视觉伺服精定位,视觉伺服精定位持续时间为118 s。以图11 所示时间轴0 s 时刻定义为T0,进入视觉伺服约40 s,小臂达到视觉伺服到位阈值,正常退出视觉伺服模式。此时,载荷适配器主动端定位销已经进入被动端的导向孔内,由于天地差异、载荷组件地面精测及在轨组装偏差及机械臂视觉伺服到位残差,小臂末端受到载荷适配器导向结构约束而处于受力状态,如图12所示。以时间轴119 s时刻定义为T1,机械臂和载荷分别进入自主交互模式。T1+184 s(T0+303 s)小机械臂开始实施力控制插合,T1+192 s(T0+311 s)载荷适配器主被动端捕获,同时小机械臂开始卸载作用力。T1+474 s(T0+593 s)载荷适配器锁定开始,T1+772 s(T0+891 s)载荷适配器锁定完成,载荷安装完成。
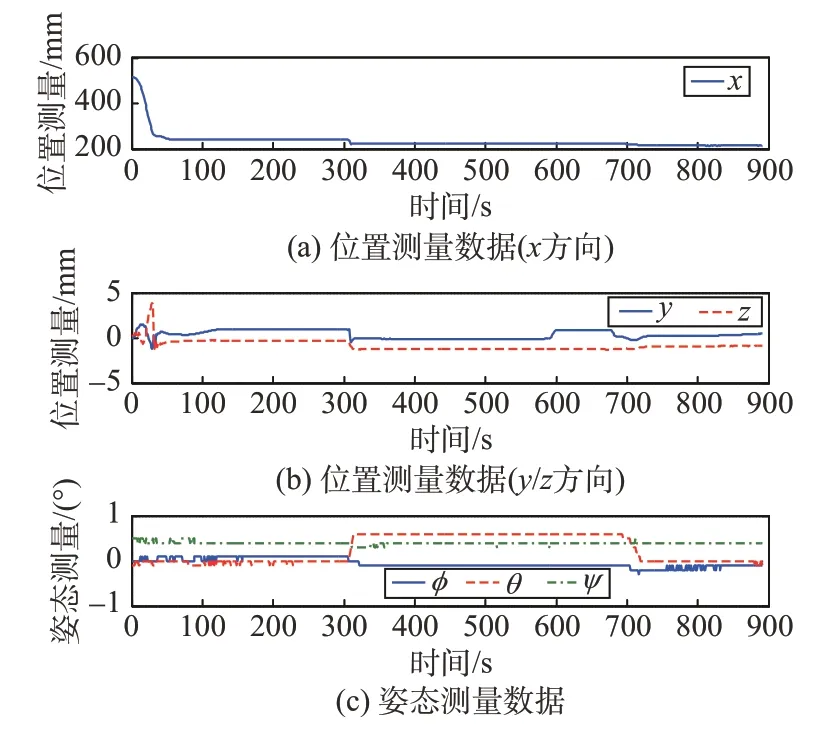
图11 安装载荷期间小臂载荷相机测量结果Fig.11 Payload camera measurement of micro manipulator during assembling payload
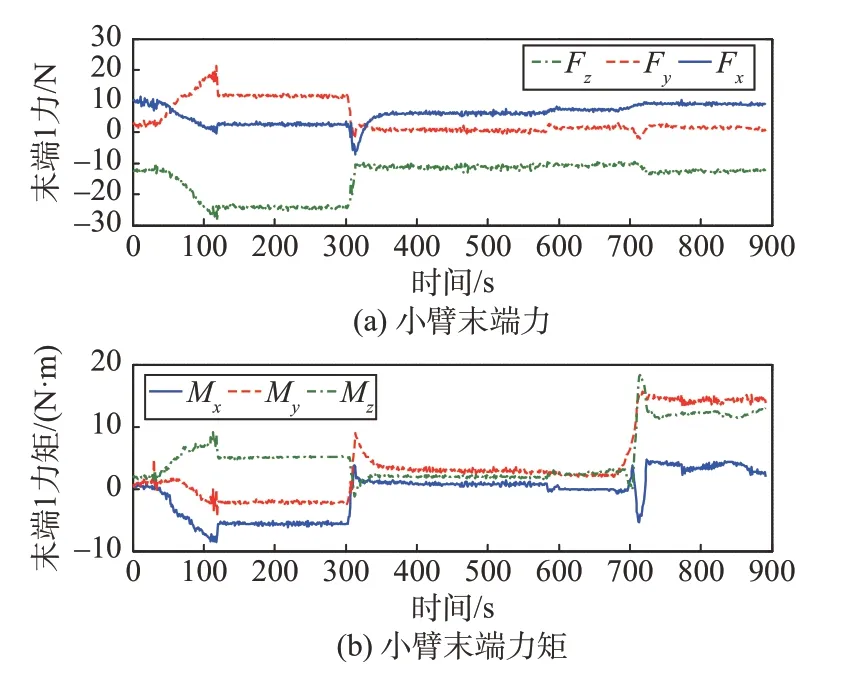
图12 安装载荷期间小臂末端力/力矩Fig.12 Endpoint force/torque of micro manipulator during assembling payload
1) 从小臂末端受力/力矩曲线(图12)可以看出,视觉伺服定位后的位置残差造成机械臂额外受力,对载荷插合造成一定扰动;这种状态保持到T1+184 s(T0+303 s)小臂切至力控制,垂直于插合方向的期望力(Fy/Fz/Mx/My/Mz)较好地解除了该扰动;插合的垂直方向自适应后,插合方向力Fx同步很快跟踪期望插合力,仅7 s 便克服了捕获阻力,完成了载荷适配器主被动端的插合,并使载荷适配器给出捕获信号。
2) 在小臂关节力矩曲线(图13)中,末端插合期望力由关节期望力矩实现,关节实际力矩在T1+184 s(T0+303 s)开始跟踪期望力矩。载荷适配器捕获(实际作用力尚未达到期望作用力),小臂收到载荷适配器的总线信号,将期望力矩恢复至0 N∙m,关节力矩传感器实测力矩重新恢复至力控制前状态,使机械臂尽可能短时间施加力控制,降低了微机械臂操作对宏机械臂的动力学影响。
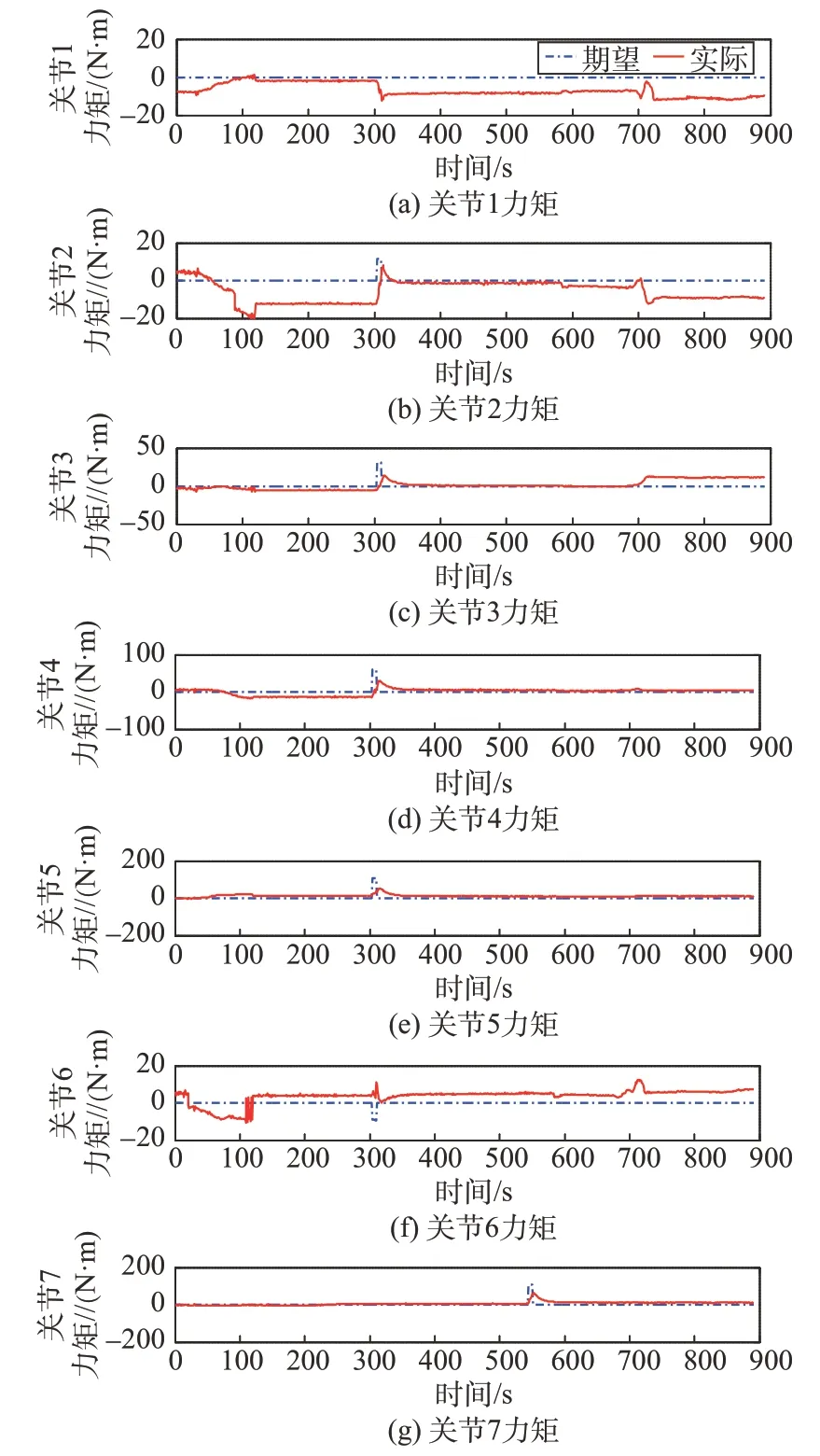
图13 安装载荷期间小臂关节力矩Fig.13 Joint torque of micro manipulator during assembling payload
3) 从小臂载荷相机测量曲线(图11)可以看出,插合横向y/z残差存在1 mm 左右,偏航姿态Ψ存在约0.4°的天地差异,这部分随机误差既无法通过视觉伺服闭环掉,也无法进行在轨准确获取,本文的力控制柔顺自适应方案是合理可行的,基本对宏、微机械臂之间的动力学耦合实现了解耦。插合方向x在力控制作用下前进了约20 mm,这与设计状态基本一致。
4) 载荷适配器锁紧过程,小机械臂已切为零力控制状态。这里设定关节随动阈值为20 N∙m,因此在T1+474 s(T0+593 s)后,小臂关节受力不超过20 N∙m 则不进行位置调整,受力状态持续保持。该方案既满足了载荷适配器从捕获状态到锁紧状态的精确定位调整适应需求,同时也满足机械臂自身稳定性需求。
5 结论
本文针对空间站组合臂操作舱外暴露载荷任务,分析了机械臂操作的尺寸链误差,提出了一种空间机械臂安装载荷自主安全操控策略。该策略以视觉伺服提高安装载荷的初始精细定位精度、以柔顺力控制和自主交互流程克服对接残余位姿偏差,减少交互及力控制持续时间,自主安全完成载荷安装操作。
经过地面验证和在轨实施,空间站组合臂顺利完成了首次载荷出舱安装任务,机械臂视觉伺服到位,位置精度优于1 mm/姿态精度优于0.5°,力控制平稳跟踪30 N 期望力并实现了横向位置残差的柔顺适应,自主流程7 s完成对接捕获并稳定卸载作用力,确保空间站首次载荷安装任务稳妥自主安全完成。
猜你喜欢
军事文摘(2024年6期)2024-02-29 10:00:22
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:34
军事文摘(2022年18期)2022-10-14 01:34:16
包装与食品机械(2021年5期)2021-11-06 11:40:14
制造技术与机床(2019年12期)2020-01-06 03:17:44
组合机床与自动化加工技术(2019年5期)2019-05-24 03:48:50
电子测试(2017年11期)2017-12-15 08:57:45
水利技术监督(2017年3期)2017-06-09 06:55:34
地矿测绘(2015年3期)2015-12-22 06:27:26
轻兵器(2015年20期)2015-09-10 07:22:44