视觉机械臂校园快递系统的设计与实现
2024-03-28 05:53张立国高海阔通信作者吴杜欢吴连松
信息记录材料 2024年2期
张立国,高海阔(通信作者),李 洁,吴杜欢,吴连松
(山东航空学院 山东 滨州 256600)
0 引言
近年来,随着互联网技术和电子商务的迅猛发展,校园快递呈现出扩张的态势,大学生的快递需求日益增加。然而,当前校园快递系统在实际运营中面临诸多问题,如效率低下、安全隐患等。 因此,校园快递的无人运输成为必然的发展趋势[1]。 同时,智能配送技术可以提高快递业的效率、质量和安全性,节约资源、减少污染和保护环境[2]。 智能配送是快递业发展的必然趋势,也是应对电商行业竞争和人力成本压力的有效策略。
针对上述需求,国内外众多厂家积极推进无人机快递配送系统的开发与应用。 2015 年,著名的机器人公司Starship Technologies 发布了名为Starship 的送货系统。 该系统可以实现自主送货,为配送企业提供便捷、高效、可靠的配送方案[3]。 新冠疫情期间,美团的无人配送系统“魔袋”正式上线于北京顺义区。 该系统拥有3 个激光雷达、19 个摄像头、2 个毫米波雷达和9 个超声波雷达,可以实时感知从5 厘米至150 米范围内360 度的环境[4]。 2016年阿里所研制的“小G”机器人投入使用。 该机器人能够实时识别环境的变化,在复杂的行驶环境中识别出行人和车辆等实体,然后利用自适应粒子滤波算法根据当前识别的实体状态进行准确的路径预测,最后通过手机扫描来签收快递。 截至2021 年9 月,阿里的无人配送车已落地22个省份,超过一百多个高校和社区,累计订单超过100 万[5]。
当前的自动化快递配送车普遍体积庞大,在取放环节仍依赖于人工,造成运营成本居高不下。 基于以上考虑,本文设计了一种基于单片机、摄像头和机械臂架构的全自动校园快递系统,实现从快递识别、取放、消毒到运送的全部环节无人化管理。 该系统无需人员干预,有望进一步提升目前智能快递配送系统的无人化程序,推动真正无人化快递系统的实现。
1 系统总体设计
校园快递系统包括主控模块、扫描模块、消毒模块、传感模块、驱动模块、光伏发电模块与控制模块。 主控模块由STM32 单片机与TB6612FNG 驱动板构成。 STM32 单片机根据内置芯片与编程算法对各个模块精确控制。TB6612FNG 驱动板能够为单片机各个模块提供稳定电压,保障单片机与各个模块的平稳运行。 扫描模块由OpenMV H7 构成,与STM32 单片机直接连接,将扫描到的快递包裹二维码信息进行内置算法处理后,实时传输给STM32 单片机。 传感模块由八路灰度传感器构成,驱动模块由直流减速电机、麦克纳姆轮与L295 N 电机驱动板构成。 两个模块共同完成校园快递系统的路线识别,从而确保了校园快递系统快递包裹的精确运输。 光伏发电模块由光伏发电板与锂电池组成。 锂电池可实时为快递系统供电,供电电压12 V。 光伏发电板将光能转化为电能,能够实时为快递系统供电以及为系统蓄电池充电。 光伏发电模块为系统的续航提供保障。 控制模块由6DOF 机械臂和相应关节的DS3230 数字电机组成,其主要功能是灵活控制快递包裹。 当快递包裹扫码完成后,控制模块会立即捕获快递包裹;一旦成功捕获,控制模块将快递包裹夹送至消毒区进行消毒;当快递系统运输完成后,控制模块可根据来自主控模块的信号将不同快递包裹进行分类放置。 控制模块实现了校园快递系统快递包裹的精确配送。实物图及其各硬件组成部分如图1 所示。
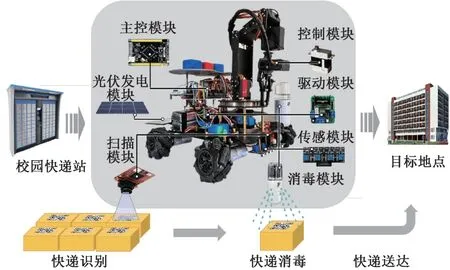
图1 实物图及硬件组成
当快递系统开始运行时,主控模块首先对各模块进行初始化操作。 随后,控制扫描模块开始扫描二维码。 在接收到二维码信息后,主控模块对其进行处理,从而确定快递包裹目标位置。 与此同时,控制模块对快递包裹进行捕捉,消毒模块对快递包裹进行消毒。当消毒作业完成后,控制模块将快递包裹放置到快递系统快递包裹放置区。 完成放置操作后,传感模块进行路线识别,确保快递包裹的准确运输。 当到达目标地点后,控制模块对快递包裹进行分类操作,确保快递包裹精确配送。 分类操作完成后,系统原路返回并等待下一次操作。 当再次扫描到二维码时,系统将重新执行上述操作。
2 系统模块设计
2.1 扫描模块二维码识别功能的实现
本项目利用扫描模块识别快递包裹上的二维码,将识别到的二维码信息转换为数字信息,以帧的格式发送给单片机,最终实现快递包裹二维码中的数据信息读取,并将数据信息传送给STM32 单片机进行处理。 在本项目中,模拟了9 个学生个人信息二维码,并在每个二维码中写入数字1~9。 当带有信息二维码的快递包裹进入系统扫描模块的检测范围时,扫描模块会识别快递包裹上的二维码,并读取二维码的数据。 随后,将1~9 十进制数字信息转换为二进制数字信息,并通过串行通信的方式传输给STM 单片机。 通过串行终端与Python 交互式命令共同作用,实现STM32 单片机与开源的机器视觉框架(open machine vision, OpenMV)的交互和控制。
2.2 消毒模块自动消毒功能的实现
消毒模块由光耦隔离继电器、雾化片稳压板和喷雾器(由外壳与雾化片组成)组成。 当扫描模块完成快递包裹二维码扫描过程后,主控模块将向控制模块发送下一步的动作执行信号。 随后,机械臂将夹取快递包裹并将其送入消毒区。 当快递包裹进入消毒区后,主控模块会控制消毒模块对快递包裹进行消毒。 消毒模块保证了校园快递系统的安全性,并确保了校园快递系统的防疫初衷得以实现。 消毒装置采用继电器与自动喷洒装置组合完成,如图2 所示。 当OpenMV 检测到快递包裹二维码后,将信号传送至主控模块(STM32 单片机),经主控模块信息处理后将控制信号传输给控制模块与消毒模块。 控制模块将携带二维码信息的快递包裹运送至消毒模块消毒区域内,然后主控模块通过控制消毒模块中的继电器的开合来定时地控制喷洒装置执行消毒作业。
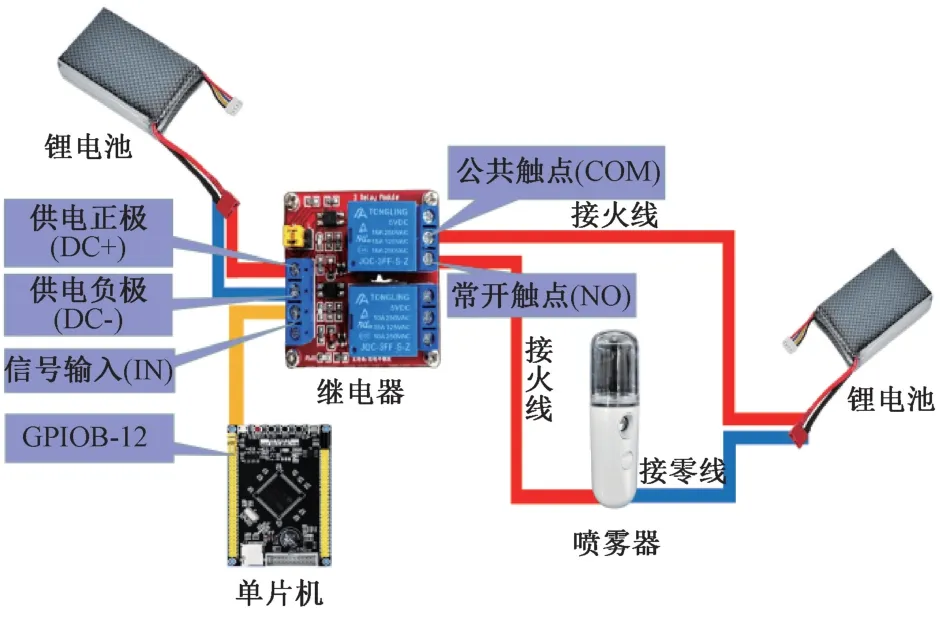
图2 消毒模块的接线方式
2.3 机械臂控制功能的实现
机械臂控制功能主要通过运动学分析实现。 机械臂运动学分析旨在研究机械臂的运动特性,包括位置、速度、加速度以及正、逆问题。 其中,机械臂的位置正问题即正运动学,通过已知的关节角度进过计算获得齐次变换矩阵,从而计算出末端的位姿。 由于机械臂的几何参数复杂烦琐,通常需要为各个连杆构建坐标系,并通过描述坐标系之间的关系来表达机械臂的几何参数。 应用比较广泛的是德纳维特(Denavit)和哈滕伯格(Hartenberg)提出的D-H 模型。
2.3.1 六轴机械臂的结构设计及D-H 坐标系的搭建
本项目中机械臂具有五转一平移的六个自由度,分别为肩关节、大臂关节、小臂关节、腕关节、腕部伸缩关节和末端旋转关节。 根据D-H 模型的建立准则,结合机械臂的实际尺寸参数,对六自由度机械臂建立D-H 坐标系,如图3 所示。 其中,基座标系{0}和坐标系{1}重合;坐标系{1}对应肩关节;坐标系{2}、{3}、{4}分别对应大臂关节、小臂关节和腕关节;坐标系{5}对应腕部伸缩移动关节;坐标系{6}对应末端旋转关节。 本项目所有的机械臂动作都由该架构导出。

图3 六自由度机械臂D-H 矩阵坐标系
2.3.2 舵机PWM 参数与旋转角度关系的确定
经过测试与计算,确定系统机械臂各舵机旋转角度与其脉冲宽度调制(pulse width modulation,PWM)参数关系,如图4 所示。 确定好参数后,在编程软件中设置对应的PWM 周期和占空比,从而控制每个舵机的旋转角度,以实现机械臂精确的运动。

图5 部分动作的实物图
2.3.3 机械臂主要执行动作的实现
本项目需要机械臂执行的主要动作包括:包裹捕捉、包裹消毒、包裹放置、包裹分类、高举与复位等。 部分动作的实物图如5 所示。
(1)包裹捕捉与包裹消毒
在检测到快递包裹二维码后,机械臂进行包裹捕捉操作,所需的舵机与旋转角度的对应关系为:舵机1——0°,舵机2——30°,舵机3——60°,舵机4——90°,舵机5——90°,舵机6——30°。 捕捉操作完成后,机械臂携带快递包裹进行消毒作业,所需的舵机与旋转角度的对应关系为:舵机1——45°,舵机2——0°,舵机3——90°,舵机4——60°,舵机5——90°,舵机6——30°。
(2)包裹放置与包裹分类
在消毒操作完成后,机械臂进行包裹放置动作(放置至系统包裹放置板),所需的舵机与旋转角度的对应关系为:舵机1——180°,舵机2——45°,舵机3——55°,舵机4——95°,舵机5——0°,舵机6——0°。 到达目标地点后与进行包裹分类操作前,机械臂需对快递包裹进行拿取操作(从系统包裹放置板上拿取),所需的舵机与旋转角度的对应关系为:舵机1——180°,舵机2——0°,舵机3——0°,舵机4——63°,舵机5——0°,舵机6——30°。
(3)高举与复位
在机械臂进行要求的动作间隙,需适当地穿插高举动作,以免机械臂误伤系统其他组件。 高举所需的舵机与旋转角度的对应关系为:舵机1——0°,舵机2——0°,舵机3——0°,舵机4——0°,舵机5——0°,舵机6——30°。 在机械臂进行工作前与工作完成后,会处于复位的姿态,复位所需的舵机与旋转角度的对应关系为:舵机1——0°,舵机2——0°,舵机3——80°,舵机4——90°,舵机5——0°,舵机6——30°。
2.4 光伏供电延长续航功能的实现
该系统通过蓄电池和太阳能光伏发电板组成储能系统。 光伏发电板将太阳能转化为电能,通过充电控制器给蓄电池和直流电机供电。 当光照强度较高时,光伏发电板输出电压达到直流电机工作电压,光伏发电板可直接给直流电机供电。 然而,在光照强度较弱时,光伏发电板输出电压达不到电机工作电压,可由蓄电池给系统供电,同时光伏发电板产生的电能也将储存到蓄电池中,以确保快递系统的持续运行。
3 结语
综上所述,本文以最常见的STM32 系列单片机配合机械臂等辅助配件为核心架构,成功制备了一个具有二维码识别,快递包裹拿取、消毒和分类等完整功能的校园快递系统。 该系统具有成本低、灵活度高的突出优点,可以解决传统校园快递最后一公里的问题,在多种场景中具有重要的推广价值。 为了进一步适应工业应用,后期可以考虑采用PLC 等更具稳定性的工业化架构来替代单片机架构,并基于所抓取的目标快递包裹的大小和重量灵活调整系统尺寸和机械臂的构型,使其真正走向商业应用。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
童话世界(2020年32期)2020-12-18
自动化学报(2019年6期)2019-07-23
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
电子制作(2018年1期)2018-04-04
中等数学(2017年2期)2017-06-01
学生天地(2017年10期)2017-05-17
制造业自动化(2017年2期)2017-03-20
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20