无人机航测精度提升方法研究
2024-03-28 05:52赵吉庆
信息记录材料 2024年2期
赵吉庆,蔡 鹏
(1 江苏航空职业技术学院 江苏 镇江 212000)
(2 镇江市无人机应用创新重点实验室 江苏 镇江 212000)
0 引言
随着航空航天技术的不断发展,如何通过航天技术实现对地球空间信息的快速、实时获取,对于保障国家安全和经济发展具有重大意义。 在此背景下,无人机航拍系统应运而生,国内外学者对无人机航拍系统的问题开展了大量的研究工作,主要包括无人机自身的改进、无人机航拍图像的精度提高、无人机航拍图像的无缝拼接技术等。 在无人机航拍系统的基础上又研发出无人机航测技术。 无人机航测技术是一种综合了低空航拍、传感器、数据处理等技术的航空摄影测量技术。 相对于传统的航空摄影方式,无人机的空中摄影系统能够根据特定的任务需求,得到各种空间数据,然后根据获取后的数据进行三维建模,获取4D 产品,是数字孪生的主要技术支持手段。 但无人机航测方式也存在着一些缺陷和问题,比如由于无人机体积小、重量轻、易受气流的影响使测量的精度无法满足实际要求。 像控点的布设、飞行高度、重叠率、天气因素和相机本身也同样影响着航测精度。 航测精度受到影响后,后续构建的三维模型的精度也会降低,所以研究提高无人机航测精度的方法很有必要[1]。
1 无人机航测系统
无人机航测系统通过使用摄影测量软件,将遥感技术、数据传输技术和图像处理技术有机结合起来,从而获得更加准确、高效的测绘数据。 这种测绘技术的数据和图像获取具有高效率和高精度等优点,具有很强的实用性[2]。 无人机航测系统主要包括以下几个部分:
(1)无人机
在整个系统中,无人机是无人机航测系统的重要组成部分,是数据采集的主要对象,主要包括引擎、转向器、飞控系统、无线通信系统、全球定位系统、位姿检测系统、自回馈稳定平台等部分。
(2)传感器
无人机航测系统中另一个重要的部分是传感器。 航测系统中的传感器可分为数码照相机、红外照相机、高光谱照相机等,用于高效地获取影像数据。
(3)无线通信技术
无线通信技术在无人机航测系统中也是不可或缺的一环。 在无人机航测系统中采用的通信技术为无线编码正交频分复用( coded orthogonal frequency division multiplexing, COFDM)技术,可实现点对点的实时数据传送,并可进行高清晰度的图像传送。 地面控制系统主要是利用无线通信系统来设定无人机的飞行路线,收集飞行参数,接收并监视从任务传感器收集到的数据,并根据参数来对飞行姿态和任务进行实时调整[3]。
2 无人机航测影响因素分析
2.1 无人机航测设备
无人机航测设备是完成无人机流程所必需的基础条件,无人机航测的精度在一定程度上也取决于设备的优良情况。 例如,如果无人机搭载的为非测量相机,其拍摄的照片会产生较大的畸变,尤其是无人机倾斜摄影测量作业时,这些会直接影响无人机航测的精度。 除此以外,无人机本身是否能够正常飞行也是影响无人机航测精度的重要原因[4]。
2.2 像控点布设影响
像控点是无人机航测中控制加密和测图的基础。 因此,如何选择适当的控制点数,并对其进行合理的控制,对于提高无人机的成像质量至关重要。 像控点布局的科学合理能够有效地提升成像精度,为实际工程提供有意义的参考;相反,不科学的像控点布局将导致成像精度下降,进而影响项目的顺利实施。
2.3 飞行高度的影响
无人机的飞行高度是影响无人机航测精度的一个重要指标,它不仅会影响航空摄影像元的尺寸,还会影响摄影图像的幅面尺寸,进而影响图像合成过程中的交叠程度。 无人机的飞行高度越小、离地越近,精度相对越高;无人机的飞行高度越大,精度相对也就越低。 在进行实地勘测时,要根据地形、建筑物等因素选择合适的飞行高度。
2.4 其他因素
天气条件的改变会影响无人机的飞行状态,也会影响无人机对图像的采集。 光线会对图像的曝光量产生影响。除此以外,无人机近距离飞行时,拍摄对象之间的明暗度差别会对相片的反差产生一定的影响。 当中午时分照相时,就可分辨出天上和地上的差别[5-8]。 无人机在飞行过程中,会因飞行姿态的改变而产生测量数据的侧倾、旋转等,导致测量数据的失真或模糊。 这些都是由于无人机的低空飞行造成的。
3 无人机航测精度提高方法
3.1 提高像控点精度
像控点和无人机航测的精度密切相关,其精度直接影响无人机航测的成果精度。 所以提高像控点精度可以提高无人机航测精度。 像控点精度包括像控点的测量精度和像控点影像目标精度。 利用GPS 进行像控点测量,其精度在5 cm 以内,可以满足大比例尺成图的技术要求。像控点图像对象的精确性依赖于图像纹理的丰富性。 当图像纹理很差时,图像内部旋转点的偏差会在2 ~3 个像素之间。 针对无人机航迹图像重叠程度高的特点,通过先设置像控点,后进行航迹拍摄,可以将内部航迹定位精度提高到1.5 个像素以下,将像控点定位精度提高到0.1 m以内,还可以解决图像控点定位不均的问题。 图1 为制作后的像控点图。
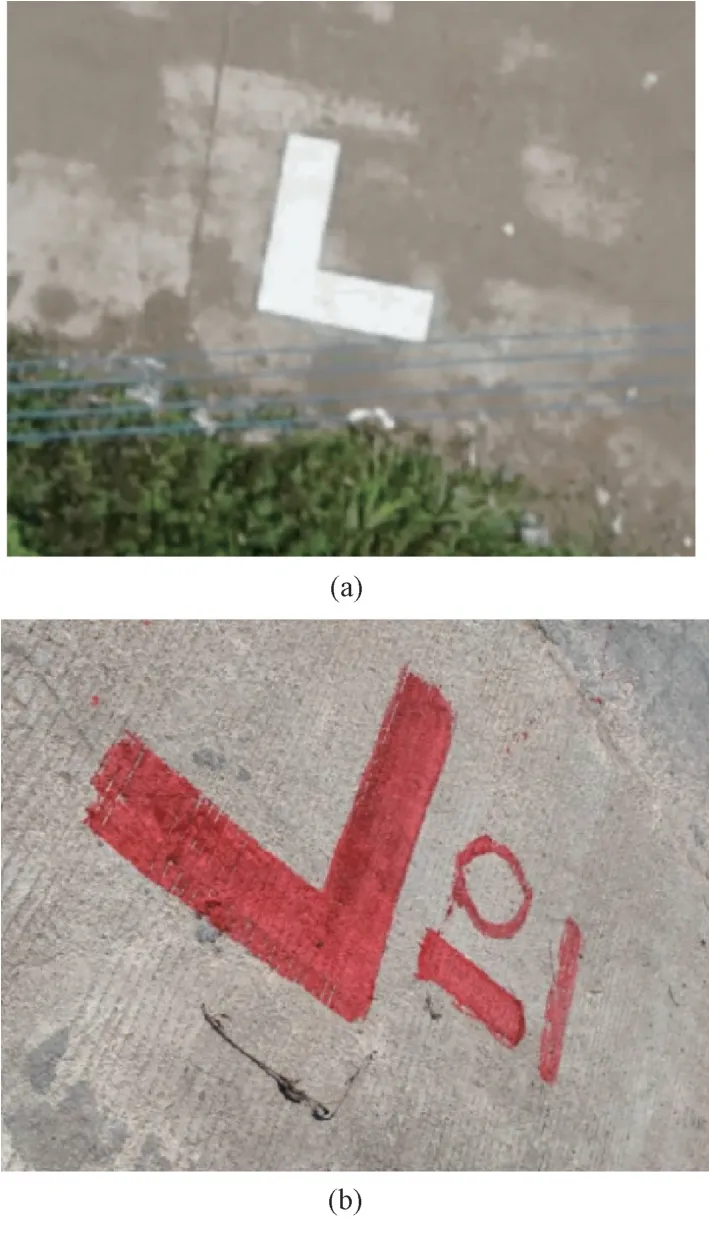
图1 像控点图
3.2 无人机相机的畸变纠正
针对无人机携带的非量测相机图像失真严重、校正结果不稳定等问题,提出了改进非量测相机失真参数的方法。一是通过构建立体控制区,实时监测摄像机在飞行过程中的失真情况;二是对摄像机镜头进行固定,以减少摄像机变形参数的改变对加密效果的影响。 具体的矫正方法是:首先,对普通相机进行检校,获得相机的失真参数;其次,将普通的单反相机改造成专业的可测量相机,使检校后的相机所拍摄的图像转换成标准的中心投影图像;最后,通过对径向和切向的畸变差进行校正,并结合多个校验区观测点与目标点的实际误差,得出利用最小二乘法对单反相机变形参数进行逼近的结论。 通过上述方法的纠正后,可以将图像的枕形畸变和桶形畸变进行纠正,如图2 所示。

图2 畸变纠正
3.3 选择合适的飞行高度
飞行高度对影像地面采样距离(ground sample distance, GSD)的影响最大,它体现了像元与真实距离之间的联系,而尺度则体现了影像中距离与真实距离之间的联系。 飞行高度的改变势必会对航空摄影照片的画幅产生影响。 当飞机高度接近地面时,GSD 值较低,其计算精度也较高。 在起伏较大的区域,选择适当的飞行高度对于提高飞行精度具有十分重要的意义。
3.4 实验验证
为验证所提无人机航测精度提升方法的实用性,本文选取某高校作为实验场地进行航测建模。 无人机航测过程采用大疆M300 无人机搭载P1 镜头。 P1 镜头经过矫正,选择80 m 飞行高度,校园内布设8 个像控点,采集部分图片如图3 所示。
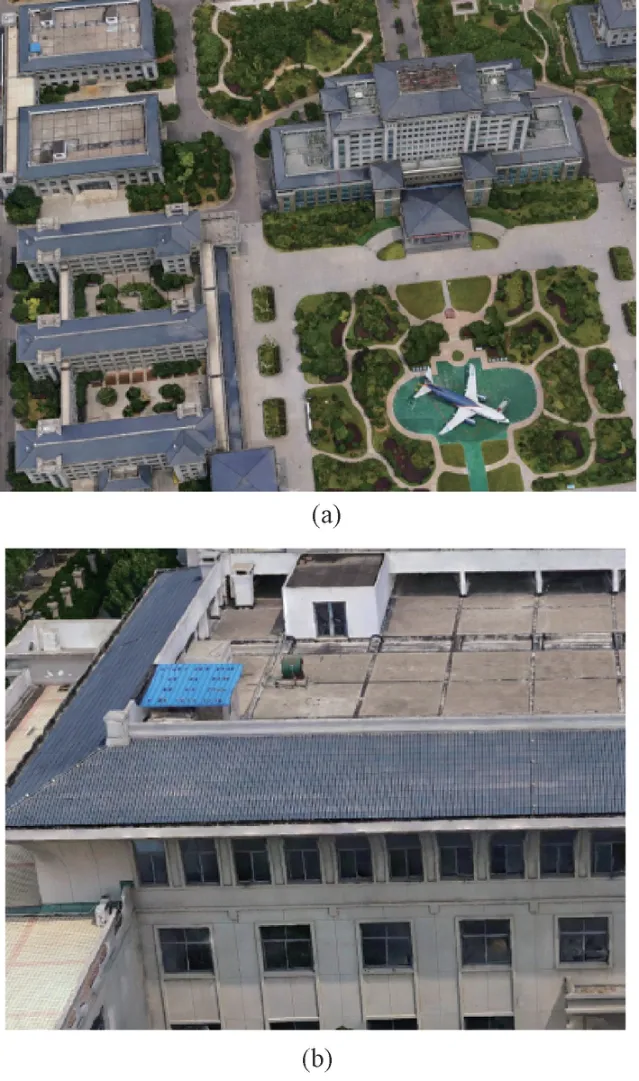
图3 航测影像
获得航测影像后,为验证本文所提出方法的有效性,对所采集的数据进行三维建模,之后生成正射影像,结果如图4 所示。 从正射影像上可以看出,无人机航测精度较好,文章所提方法具有一定效果。

图4 建模结果
4 结语
随着实景三维项目的推进实施以及数字孪生理念的推广,无人机航测技术得到越来越广泛的应用。 本文首先对无人机航测的系统组成进行了详细的阐述;其次对影响无人机航测的因素进行了重点分析,包括相片倾角、像控点布设、飞行高度、天气等因素;最后针对上述因素,提出了对应的提高航测精度的方法,包括提高像控点精度、无人机相机的畸变纠正等。 利用本文所研究的方法进行三维建模实验,实验结果证明该方法对提升航测精度具有一定的作用。
猜你喜欢
中外文摘(2021年10期)2021-05-31
热带作物学报(2021年1期)2021-02-22
科技信息·中旬刊(2018年9期)2018-10-21
小学生优秀作文(低年级)(2018年6期)2018-05-19
摄影之友(影像视觉)(2017年10期)2017-11-07
作文通讯·高中版(2017年6期)2017-07-10
陕西画报(2017年1期)2017-02-11
航空模型(2016年5期)2016-07-25
百科探秘·航空航天(2015年12期)2015-11-07
癌变·畸变·突变(2014年2期)2014-03-01