基于遗传算法的农田智能灌溉控制系统设计
2024-03-27 08:28:04彭小莉周苏红
水利技术监督 2024年3期
彭小莉,周苏红,尹 峥,燕 珍
(1.徐州市水利建筑设计研究院有限公司,江苏 徐州 221000;2.徐州市水利工程建设监理中心有限公司,江苏 徐州 221000)
为了实现农业的可持续发展、提升农作物产量,农业发展现代化和智能化势在必行。传统的农田灌溉方式依赖农民的经验和传统习惯,导致灌溉不均衡、浪费和不合理现象普遍存在。然而,随着先进传感器、无线通信技术和自动控制算法的发展,农田智能灌溉控制系统为解决这一难题提供了一种自动、精确、高效的灌溉解决方案,即应用多种传感器设备实现农田土壤及外界气象环境的监测,并基于无线通信技术实现数据传输,让农田智能灌溉系统能够根据传感器数据和农作物需求,智能地控制灌溉系统的开关状态和水量。目前,该类系统已经在一些农场和农田管理中应用,取得了良好的节水效果,但其应用仍有较大的提升空间。基于此,本次研究提出基于基于遗传算法的农田智能灌溉控制系统设计,希望可通过本次研究,可为农田灌溉提供更高效、精确和可持续的解决方案,并未后续农业智能系统的研究提供文献参考。
1 农田智能灌溉控制系统硬件设计
1.1 系统总体架构设计
本次研究设计的用于农田的智能灌溉控制系统总体架构图设计如图1所示。

图1 农田智能灌溉控制系统总体架构设计图
由图1可知,系统硬件主要包括传感器数据采集模块、控制模块、数据存储模块、执行模块等组成。系统中的传感器模块主要用于外界环境数据的采集,其采集质量将会直接影响系统后续的控制效果。控制模块根据传感器模块获取到的数据进行分析与处理,判断当前的农田灌溉需求,并生成相应的灌溉方案。执行模块负责实施灌溉方案,控制灌溉设备的启动、关闭和调整水量等操作。这可能涉及到水泵、喷灌器、滴灌器等设备的控制。通信模块用于与上位机或者远程服务器进行通信,以便实现远程监控和控制。上位机用于接收和存储从农田智能灌溉控制系统传输过来的数据,同时也提供远程监控和控制的功能。
1.2 控制模块设计
控制模块是农田智能灌溉控制系统中的重要模块,其承担着控制下位机信号采集和数据处理的主要任务,本次研究以S3C6410型号微处理器为核心,完成控制模块设计。S3C6410型号微处理器结构图如图2所示。

图2 S3C6410型号微处理器结构图
由图2可知,S3C6410型号微处理器具有64/32位的总线结构,可以在液晶显示器和电视显示器上进行同步的影像接收。该微处理器还配备了强大的硬件加速器,用于图像视频处理和音频处理等任务。同时,S3C6410还考虑了成本节约问题,在外部还提供了包括USB、PWM定时器等多个硬件接口。综上所述,S3C6410型号微处理器具有出色的通信、快速处理和存储功能,可对系统下位机进行良好控制。
1.3 数据存储模块设计
根据系统功能设计,本次研究设计系统需要采集外界环境及农田土壤中的多种信息,故其传感器模块具有环境温湿度传感器、气压传感器等。利用传感器完成参数采集后,输入至数据存储模块中,以为后续控制提供坚实数据作为基础。本次研究设计的存储模块主要由NAND Flash、NOR Flash和DDR 3部分组成。选用的NAND FLASH的型号是K9G8G08U0A,配置是1G Bytes,其是一种非易失性存储器,拥有较高的存储密度,且其应用成本较低,满足系统大容量数据存储的需求。NOR Flash也是一种常用的非易失性存储器,但它主要用于代码存储和执行,以字节为单位进行读写操作,具有较快的访问速度和较长的寿命。DDR(Double Data Rate)是一种高速的双倍数据传输技术,它能够提供更快的数据传输速率。DDR作为系统的一部分,负责传输存储模块中的数据到其他部件,如控制模块和通信模块,以实现高效的数据交互。综上所述,本次研究结合了NAND Flash、NOR Flash和DDR等存储模块来满足系统对数据存储的需求,确保稳定、可靠的数据保存和传输。
2 农田智能灌溉控制系统软件设计
2.1 智能灌溉PID控制设计
在本文设计的农田灌溉控制系统中,先由外界工作人员完成控制灌溉目标值的设定,通过传感器对外部环境数据进行收集,然后将其输入到微处理器中对其进行分析,最后通过控制算法运算出系统的控制量,再将控制指令传送到执行机构,从而实现对农田的灌溉。为实现农田的智能灌溉,本次基于PID算法完成智能灌溉控制器的设计。令系统输出和偏差分别为u(t)和e(t),则基于PID理论的智能灌溉控制系统输出可表示为:
(1)
式中,kp—比例参数;ki—积分参数;kd—微分参数。
对其参数进行分析可知,kp值越大,系统响应速度越快,但超调越大;当ki值较大时,虽然可以有效地消除静差,提高响应速度,但是也会引起过饱和;kd值越大,系统的超调量就越小,但是它的调整时间也就越长,所以为了达到对灌溉系统的良好控制,需要对3个控制参数进行动态调节,其动态调节律具体如下:
kp[e(t)]=kp1+kp2[exp(kp3e(t))+
exp(-kp3e(t))]
(2)
(3)
(4)
因此,灌溉的PID智能控制器输出为
u(t)=kp[e(t)]e(t)+

(5)
由此,完成PID智能灌溉控制器的设计,其能够根据偏差值的大小动态调整控制输出,具有更好的控制效果。
2.2 基于改进遗传算法完成PID控制优化设计
以上所构造的PID智能控制器中包含多个控制参数,其选取均会对灌溉系统控制性能造成较大影响。如果根据模拟调试的方式来确定这些参数,会消耗大量成本,并且还不能保证这些参数是不是最优的,所以,本次研究在完成PID智能灌溉控制器设计后,选取遗传算法进行控制参数寻优,其具体步骤如下:
(1)种群初始化:设定参数范围,在范围内均匀生成初始PID控制器参数作为种群。
(2)适应度函数确定:为做好适应度函数设计,本次研究考虑了控制偏差、控制输出、调节时间等参数,将其分为e(t)≥0和e(t)<0两种情况,设计适应度函数如下:
(6)
式中,tr—上升时间;δ—超调量;w1、w2、w3和w4—权值。
(3)选择操作:采用适合度函数来评价群体内个体的优劣,选取适合度高的作为父代;
(4)交叉变异操作:对所选出的父代进行交叉变异,从而产生新的后代。所谓的交叉,就是两个个体在一定条件下交换一部分编码。变异是个体在具有变化概率的情况下有一定的几率改变其自身的编码值,这两种方法均可生成新的个体。对于新个体进行适应度评价,选择最好的个体保留;
(5)终止条件判断:确定结束条件是否已经到达,如果没有,返回第3步;当结束条件满足时,输出适应度最高的个体,此即为控制参数最优解。
以此为基础,完成PID控制器参数的优化,实现灌溉优化控制。
3 实验与分析
3.1 实验环境
为了验证本文设计系统的应用性能,选用江苏地区某农田作为实验对象,选取文献[3]系统、文献[4]系统作为对比系统,设置不同灌溉系统的对比试验。并使用一台搭载Windows 10操作系统的笔记本电脑对其进行系统搭建,开展对比实验。为有效获得实验的数据结果,需要在性能强大的服务器上完成,服务器的硬件环境见表1。

表1 服务器软硬件参数
3.2 实验结果
土壤湿度均匀性能够评估农田智能灌溉控制系统对土壤湿度的调控能力。较大的土壤湿度均匀性意味着土壤中的水分分布更加平衡,更多的植物根系能够受益于适宜的土壤湿度,从而促进均匀的生长和产量。3种方法的测试结果如图3所示。
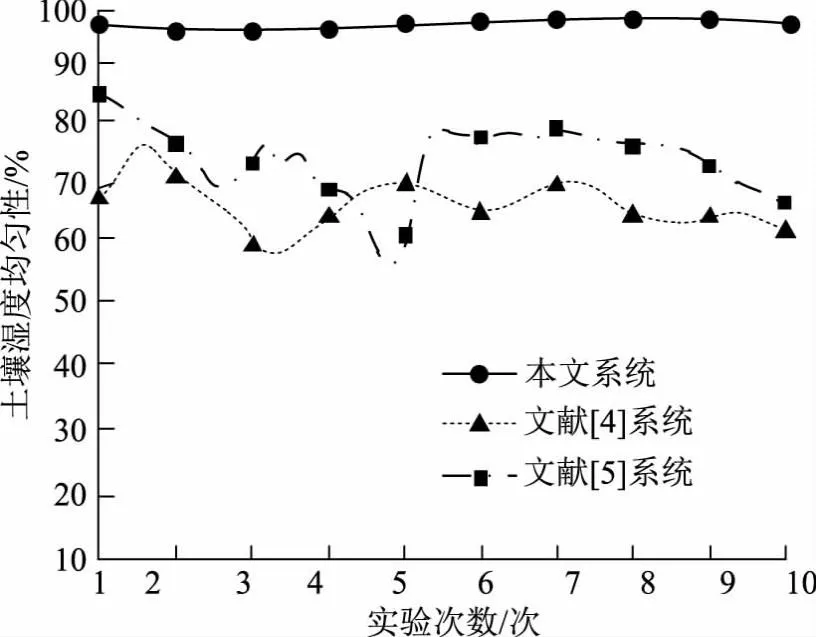
图3 土壤湿度均匀性对比结果
根据图3可以看出,本文方法的土壤湿度均匀性明显高于对比方法,最高时达到97%,由此可见,本文设计系统具体实用性。
通过测试控制延时验证系统性能,多次测试获得对比结果见表2。

表2 3种控制系统时间延迟对比
通过上表数据可知,应用所提系统开展册测试,其控制时延均低于1.21ms,而应用文献[4]系统控制市场均高于3.65ms,应用文献[5]系统控制市场均高于4.17ms,由此可证明,应用所提系统控制性能更优,应用效果更佳。这主要是由于本次研究在硬件设备的基础上,基于PID算法完成智能灌溉控制器的设计及改进,并基于遗传算法完成控制器控制参数最优解的选取,以实现对系统的精准控制,故其应用性能更佳。
4 结语
为助力农业生产实现自动化、智能化,提升农田灌溉控制效果,提出了一种基于遗传算法的农田智能灌溉控制系统设计。该系统在硬件设备的基础上,基于PID算法设计可控制农田灌溉的智能控制器,并基于遗传算法寻求最优的控制参数,实现农田灌溉的高精度控制。该研究为农田灌溉控制的智能化提供了一种新的思路和方法,具有一定的指导意义和借鉴价值。但是,在将其推广应用于实际生产中时,还需要进一步考虑系统的成本和实施难度,并与实际情况相结合,以确保该系统在农业生产中的实用性和可行性。
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-28 01:37:47
云南农业(2021年10期)2021-10-22 01:13:10
云南农业(2021年9期)2021-09-24 11:57:06
云南农业(2021年8期)2021-09-06 11:36:44
云南农业(2021年3期)2021-04-24 02:30:54
发明与创新(2017年3期)2017-01-18 05:14:04
农家科技中旬版(2016年12期)2016-04-16 03:41:29
卫星与网络(2016年12期)2016-02-05 09:23:26
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17