新能源船舶永磁同步电机无位置传感器控制的研究
2024-03-26 01:32:40杨泽贤陈嘉福
船电技术 2024年3期
杨泽贤,陈嘉福
新能源船舶永磁同步电机无位置传感器控制的研究
杨泽贤,陈嘉福
(武汉长海高新技术有限公司,武汉 430233)
为了实现新能源船舶永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)全速域无位置传感器控制,本文采用低速控制结合中高速模型参考自适应观测器的全速域无位置传感器复合控制算法。该方法实现了新能源船舶推进无位置传感器控制系统的平稳可靠运行,在新能源船舶电力推进中具有较强的实际意义。
新能源船舶;PMSM;无位置传感器;控制;模型参考自适应
0 引言
因能源短缺以及温室气体排放的问题,全球航运业将面临节能减排的巨大压力。新能源船舶具有运行成本低、零排放、无污染、噪音小等优势,其得到了广泛的关注[1]。永磁同步电机控制系统作为新能源船舶的动力核心,其控制系统的稳定、可靠具有重要意义[2]。永磁同步电机因其结构简单、体积小、效率高、启动转矩大、运行可靠等特点,在军事、工业等领域应用广泛[3-4]。一般来说传统的闭环控制需要获得PMSM转子的位置和速度信息实现对电机的控制。但轮船使用场景面临温湿度较大、振荡较多及易受腐蚀等恶劣工况,机械式编码器的使用将导致后期运行维护成本升高,同时机械编码器的使用增加了硬件成本、系统复杂度以及降低了控制系统的可靠性[5]。为了实现PMSM的高精度、高动态性能,所以无位置控制就被引入新能源船舶的控制系统。
由于无位置控制技术的优异性能表现,无位置控制技术成为国内外学者的研究的热点[6-8]。目前应用较多的是扩展卡尔曼滤波法、滑模观测器法、模型参考自适应法等。文献[9-10]介绍了基于滑模观测器的转子位置估计方法,该方法具有参数敏感性低、动态响应快、鲁棒性强的特点,但却因抖振存在,影响了控制性能。文献[11]采用扩展卡尔曼滤波方法估计了转子转速,其具有良好的抗干扰性能和参数鲁棒性,但却面临着过程噪声统计偏差或粗差干扰的问题,不能保证在整个速度范围内收敛。模型参考自适应算法因其简单、易于在数字控制系统中应用,且具有优越的稳定性和收敛性[12]。
本文针对新能源船舶的永磁同步电机推进控制无位置传感器控制系统,低速域使用I/f控制,中高速域采用模型参考自适应观测器的控制,结合两种控制方法实现了无位置传感器复合控制系统的平稳运行。通过实验验证了上述方法的可行性和有效性,同时该方法有效的改善了新能源船舶电力推进永磁电机控制系统的性能,具有较强的实际应用意义。
1 永磁同步电机数学模型
将PMSM在三相静止坐标系下的数学模型经Clarke变换及Park变换后可得到PMSM在dq旋转坐标系下定子电压的数学模型方程为:

电机的机械运动方程为:

式中:ω为电机的机械角速度;为转动惯量;为阻尼系数; T为负载转矩; T为电磁转矩。
电磁转矩方程为:

2 模型参考自适应观测器设计
2.1 模型参考自适应系统原理
模型参考自适应法相比其他的方法具有控制相对简单、不需要额外的信号注入、稳定性良好的特点。模型参考自适应系统通常由参考模型、可调模型以及自适应律三部分组成[13]。其中参考模型指的是不含有待估计参数的方程,而可调模型指的是含有待估计参数的方程,利用 2 个模型在同时工作时输出量的差值输入到自适应机构,采用合适的自适应律来不断调节模型中估计参数,使两个模型输出相一致,实现参数估计[14-15]。结构原理图如图1所示。

图1 模型参考自适应结构原理图
2.2 可调模型与参考模型的确定
在模型参考自适应系统中,采用电流方程为参考模型,对于PMSM而言,同步旋转坐标系下的电流方程为:

为了便于分析系统稳定性,将转速量约束于系统矩阵中,将式(4)改写为下面的形式:

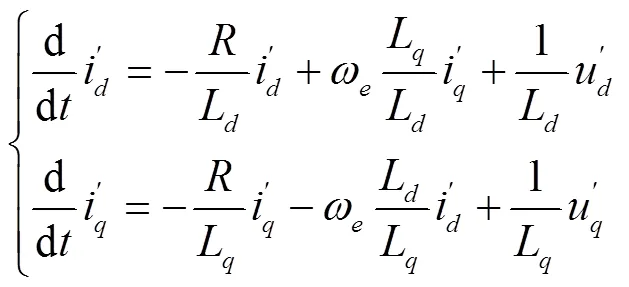
由于在式(6)中包含转子速度信息,将式(6)以估计值表示可以得到可调模型为式(7):

2.3 参考自适应律的确定
本文采用 Popov 超稳定性理论来设计自适应律。Popov 超稳定性理论设计的自适应率能有效地使可调模型逼近参考模型,同时保证系统的稳定性[16-17]。由此可以得到转速的估计值:

3 复合控制系统
3.1 低速域I/f控制
目前主流的无位置控制方法是通过检测绕组基波反电势,然后通过基波模型得到转子位子。但在电机的零低速启动阶段,电机绕组反电势很小或为零,就无法准确计算转子位置信息,不能满足伺服系统需获取对永磁同步电机高精度转子位置的要求[17]。相比于V/f控制存在的不具备负载转矩匹配能力以及V/f曲线整定困难的缺点,I/f控制是一种速度开环,电流闭环的控制方式,可以根据负载转矩选择合适的电流幅值[18]。
I/f流频比启动方式的基本思想是在电枢绕组中产生幅值跟随参考值、频率逐渐增大的旋转电流矢量,使转子加速启动。I/f启动的优点是此时电机工作在速度开环、电流闭环的状态,当经过电流传感器传回的电流可以受到期望电流值的限制,可有效避免瞬间过流现象。I/f控制的系统框如图2所示:

图2 I/f控制的系统框图

此时,电机的电磁转矩方程为:

3.2 低速到中高速运行的切换过程
当I/f启动成功之后,电机转速达到一定范围,基于模型参考自适应的观测器可以快速准确的观测转子位置,此时就可以切换到模型参考自适应观测器闭环控制运行。切换过程如图3所示:

图3 d轴切换过程


式中k为电流调整参数,t为调整的初始时刻,为调整后的时刻,其中k应合理设置来保证平稳切换。
4 实验分析
为验证所提出的新能源船舶PMSM无位置传感器控制算法的有效性和准确性。本文结合如图4所示的模型参考自适应无位置传感器控制系统框图进行实验研究,控制系统由坐标变换模块、PI模块、SVPWM模块、模型参考自适应系统模块、永磁同步电机模块、逆变器模块等组成。
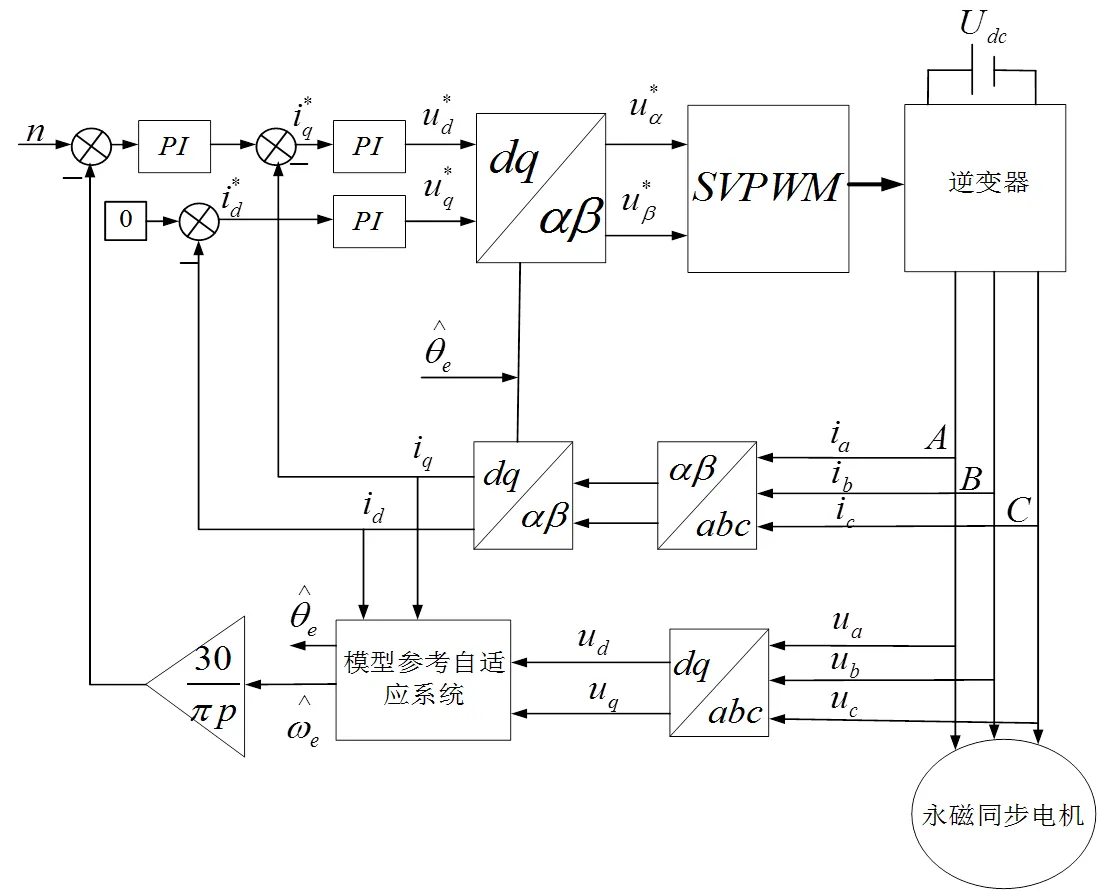
图4 模型参考自适应无位置传感器控制系统框图
实验中永磁同步电机参数如表1所示:
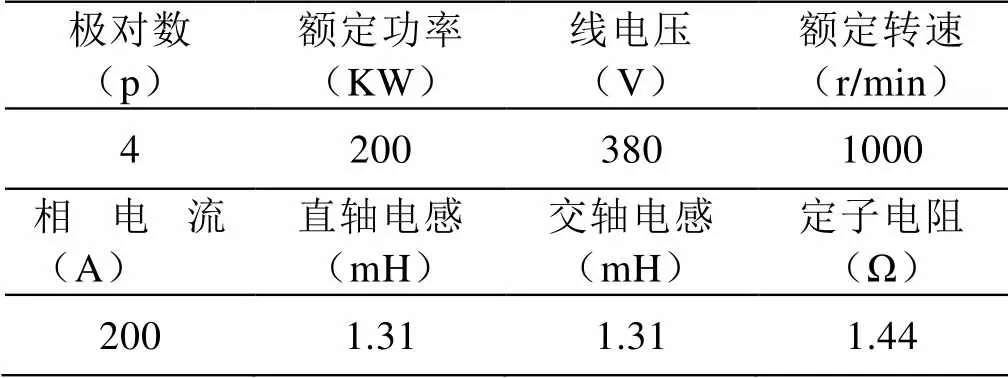
表1 永磁同步电机参数表
为了验证该控制方法在实际系统中的的有效性,搭建了基于DSP28335的PMSM无位置传感器控制系统的实验平台,如图5所示。

图5 PMSM实验平台


图6 开环-切换-闭环时电机转子速度波形

图7 开环-切换-闭环时交直轴电流波形
5 结论
本文基于新能源船舶电力推进系统对PMSM无位置传感器控制进行设计与开发,并进行了实验。实验结果表明I/f控制结合模型参考自适应的无位置传感器复合控制策略在交流调速系统中能快速、准确地辨识转速和转子位置,性能良好,鲁棒性强。

图8 动态时电机速度波形

图9 动态时交直轴电流波形
[1] 陈明志. 谈新能源在船舶上应用的现状和展望[J]. 珠江水运, 2013(13): 74-75.
[2] 何梓强. 新能源与电力电子在船舶电力推进中的应用[J]. 科技风, 2013(5): 92.
[3] 何万青. 永磁同步电机在新能源车上的应用[J]. 时代汽车, 2023(01): 106-108.
[4] 吕从鑫, 汪波, 陈静波, 等. 永磁同步电机控制策略综述与展望[J]. 电气传动自动化, 2022, 44(4): 1-10.
[5] 生龙, 刘立昊, 叶永强. 永磁同步电机无位置传感器控制现状和展望[J]. 电工电气, 2023(2): 1-8.
[6] 李勇, 胡晗, 秦贞超, 等. 基于改进模型参考自适应的永磁轮毂电机无位置传感器控制[J]. 汽车安全与节能学报, 2022, 13(3): 560-570.
[7] 肖仁鑫, 赵晗, 胡海双. 宽转速范围永磁同步电机无位置传感器控制[J]. 组合机床与自动化加工技术, 2022(8): 53-56.
[8] 李亚轮, 黄波, 陈贺军, 等. 基于改进的SMO永磁同步电机无位置传感器研究[J]. 计算机与数字工程, 2023, 51(2): 509-514.
[9] 袁薇雯. 永磁同步电机的自适应滑模无位置传感器抗扰控制[D]. 西安: 西安理工大学, 2022.
[10] 卢耀武. 基于SMO电动汽车用内置式永磁同步电机无位置传感器控制[J]. 节能, 2021, 40(7): 46-48.
[11] 王婷, 马继先, 瞿云飞, 等. 基于扩展卡尔曼滤波法的船舶永磁同步电机无传感器控制[J]. 软件, 2020, 41(7): 255-259.
[12] 张蔚, 王家乐, 梁惺彦, 等. 混合励磁轴向磁通切换永磁电机全速域无位置传感器控制[J]. 中国电机工程学报, 2021, 41(13): 4646-4655, 中插25.
[13] 苗敬利, 李星, 董博. 基于模型参考自适应的永磁同步电机矢量控制策略[J]. 机械工程与自动化, 2020(6): 16-18.
[14] 邓云霄. 全速范围永磁同步电机无位置传感器复合控制法研究[D]. 重庆: 重庆理工大学, 2022.
[15] 牛莹, 路建, 尹小龙, 等. 基于DSP的模型参考自适应转速估算方法[J]. 微特电机, 2020, 48(9): 54-57.
[16] 温志威, 石懿晨, 杨泽贤, 等. 基于RTU的PMSM无位置传感器低速控制算法研究[J]. 电动工具, 2020(3): 13-17.
[17] 刘计龙, 付康壮, 麦志勤, 等. 基于双频陷波器的改进型高频脉振电压注入无位置传感器控制策略[J]. 中国电机工程学报, 2021, 41(2): 749-758, 中插33.
[18] 杨泽贤. 新型轴向磁场磁通切换电机无位置传感器控制系统的研究[D]. 南通: 南通大学, 2020.
[19] 刘计龙, 肖飞, 麦志勤, 等. 基于双dq空间的永磁同步电机无位置传感器起动策略[J]. 电工技术学报, 2018, 33(12): 2676-2684.
[20] 刘计龙, 肖飞, 麦志勤, 等. IF控制结合滑模观测器的永磁同步电机无位置传感器复合控制策略[J]. 电工技术学报, 2018, 33(4): 919-929.
[21] 麦志勤, 刘计龙, 肖飞, 等. 基于估计位置反馈电流解调算法的改进型高频旋转电压注入无位置传感器控制策略[J]. 电工技术学报, 2022, 37(4): 870-881, 891.
[22] 付康壮, 刘计龙, 麦志勤, 等. 改进型IF控制结合有效磁链法的永磁同步电机全速域无位置传感器控制策略[J]. 电工技术学报, 2022, 37(22): 5704-5716.
Research on position-sensorless control of PMSM for new energy ships
Yang Zexian, Chen Jiafu
(Wuhan Great Sea Hi-Tech Co.,LTD., Wuhan 430233, China)
TM46
A
1003-4862(2024)03-0027-05
2023-06-20
杨泽贤(1993-),男,硕士。研究方向:电机控制及驱动。E-mail: 15189770017@163.com
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年11期)2014-04-04 09:21:36
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29