
进水管设置角度对圆形循环水养殖池自清洗能力的影响
2024-03-25 07:43:30桂福坤胡佳俊孔剑桥潘训然张泽坤冯德军曲晓玉
水产学报 2024年3期
朱 放,桂福坤,胡佳俊,孔剑桥,潘训然,张泽坤,冯德军,曲晓玉*
(1.浙江海洋大学船舶与海运学院,浙江 舟山 316022;2.浙江海洋大学,国家海洋设施养殖工程技术研究中心,浙江 舟山 316022;3.浙江海洋大学水产学院,浙江 舟山 316022)
循环水养殖系统 (recirculating aquaculture system,RAS)是采用工程设施和水处理设备将养殖过程中排放的污水处理后实现循环利用,通过构建标准化养殖管理技术,人为控制养殖条件为养殖生物提供适宜的生长环境条件,实现高产、高效、优质和“零”污染的系统[1]。近年来我国工厂化循环水养殖逐步兴起,并占据越来越大的市场份额,这也是水产养殖业发展前行的必然趋势[2]。工厂化循环水养殖的密度高,饲料投放量大,在养殖过程中极易产生大量的残饵粪便等污物,如果不及时处理将会严重影响养殖对象的生长[3]。在实际的养殖生产中,一般通过设置进出水方式调节池内流场情况从而达到高效集排污的目的[4],但进水管设置角度往往仅凭养殖者的主观经验,缺乏科学的指导。
为了探究进水管设置角度对圆形养殖池内水动力特性的影响,Despres[5]开展了不同进水角度对养殖池内流场影响的实验,研究表明,进水管的角度对养殖池内流场分布有重要的影响。Oca等[6]分析了影响池内流速的设计参数,建立了单位质量的角动量来评估速度分布的模型,结果表明进水装置是决定养殖池流场的因素之一。Oca等[7]采用粒子跟踪测速技术(particle tracking velocimetry,PTV),进一步研究了4 种不同进水方式和出水方式的矩形养殖池内的流场分布,结果发现,单侧进水、单侧出水存在水体混合能力与排污能力差等问题。Davidson 等[8]通过调整Cornell-type养殖池进水口的入水角度来调节养殖池内平均流速及其他水动力参数。为了探究进水管设置角度对养殖池内污物汇集的影响,Papáček 等[9]和Gorle 等[10]利用计算流体力学研究了颗粒在养殖池内的运动情况,发现进水管设置角度与养殖池自清洗能力密切相关。赵乐等[11]通过研究方形圆弧角养殖池流场特性,得出流速应在适宜鱼类生长范围内尽可能高,进水管设置角度为40°工况时污物的汇集效果最好。桂福坤等[12]利用物理模型实验的方法研究了水车式增氧机驱动下方形圆切角养殖池污物汇集水动力特性,研究表明,水车式增氧机与池壁的夹角为45°工况时污物汇集效果最优。
综上所述,国内外学者研究重点都放在了圆形养殖池内流场水动力特性方面,桂福坤等[12]进行的污物汇集实验采用的是方形圆切角养殖池,且没有将污物的汇集特性与水动力特性相结合,难以为圆形养殖池进水管设置角度的布置提供科学全面的指导。本实验以典型的工厂化圆形养殖池为研究对象,探索圆形养殖池进水管设置角度对池内污物汇集特性的影响,并且结合PIV 技术测量了每组工况养殖池内流场分布,以期为优化工厂化养殖池的集排污性能提供参考依据。
1 材料与方法
1.1 实验装置
养殖池内的污物汇集试验在浙江海洋大学国家海洋设施养殖工程技术研究中心设施养殖实验室进行。实验装置主要由养殖池、水循环系统、流量计测系统和图像采集系统4 部分组成(图1-a)。养殖池为圆形,由透明亚克力板材黏制而成,内壁高50 cm,内部直径98 cm,底部正中心位置开有直径5 cm 的排水口,池底无坡度。此外,为了更清晰地拍摄到分布在养殖池底部的污物,在养殖池底部铺设白色贴膜。水循环系统由养殖池、锥形污物收集桶、水泵、水管等组成,水流方向如图中箭头所示,养殖池内的水通过底部连通水管流入锥形桶,然后通过水泵输送至养殖池,完成水循环过程。进水管和支架的连接处有刻度盘,进水管与水管在刻度盘处密封活接,可以转动进水管从而调节射流角度。流量计测系统由安装在进水管道的2 个流量计(基恩士FD-Q20C)和阀门组成,流量计可以监测进水管实时输入养殖池的流量(L/min),阀门可以调节进水量。图像采集系统由设置在养殖池正上方的高清摄像机(VA-200PRO)和控制软件组成,主要记录污物运动汇集过程。
进水管是直径2 cm 且下端封闭的透明亚克力管,双管对称贴壁进水,并在距进水管底端2、10、18 cm 处开3 个方向相同直径为0.6 cm 的进水口。进水管设置角度为0°时,出水口与池壁之间的距离为1 cm,随进水管设置角度的增加,进水管转动导致出水口与池壁之间的距离逐渐增大到约为1.93 cm。利用直径1.6 mm,长度1.0~2.0 mm的椭球形缓沉对虾饲料替代养殖池内的残饵等固体颗粒污物。
养殖池内的流场分布特性测量试验在青岛光流软件技术有限公司海洋测量实验室进行。实验装置主要由养殖池、水循环系统、流量计测系统和粒子图像测速(Particle Image Velocimetry,PIV)系统4 部分组成(图1-b)。养殖池、水循环系统和流量计测系统与污物汇集试验中的一致,将圆形养殖池嵌入了正方形亚克力水池中,以避免圆形池壁对激光的折射。PIV 系统由激光器、高速相机、示踪粒子等组成,测量时在养殖池中撒入示踪粒子,以粒子速度代表其所在流场内流体的运动速度,应用激光照射一个测试平面,用成像的方法记录下2 次曝光的粒子位置,用图像分析技术得到粒子群的位移,通过位移和曝光的时间间隔求得各点的流速矢量[13-14]。考虑到污物对养殖池内流速的影响很小且长时间在养殖池内会影响水的清澈度,从而削弱激光的穿透程度,影响PIV 实验结果。因此,在流场分布特性测量实验中,没有向养殖池内撒入污物替代物。
1.2 实验设计
该研究主要通过实验的方法研究射流驱动下进水管设置角度对圆形养殖池内污物汇集特性和流场分布特性(相应的水动力参数)的影响。
第1 部分为污物汇集特性测量实验。实验设计水深20 cm,径深比(直径/水深)约为5∶1,进水流量为5.2 L/min(单个进水管流量2.6 L/min),水力停留时间约为30 min。研究双管贴壁进水模式下,进水管设置角度(出水方向与池壁切线形成的锐角)对养殖池内污物汇集效果的影响,实验中设置0°、10°、20°、30°、40°、45°、50°、60°及70°共计9 组实验工况,依次标号为工况1~9。实验开始前安装好各实验设备,然后开启水泵,依据流量计调节进水管阀门控制进水流量,等待约30 min,池内水体流动趋于稳定。然后打开设置在养殖池正上方的摄像头,将10 g 对虾饲料(单次投喂量)快速均匀地撒在水池内并同时开始计时(此时记为t=0 min),观察池内污物汇集情况和规律。记录30 min,然后关闭相机,保存视频资料,开始下一组实验。
第2 部分为流场分布特性测量实验。流场分布特性测量实验设计工况与污物汇集特性实验相同,其中每个角度工况下测量距养殖池底H=1、2、10、19 cm (底层、近底层、中层、上层)的4 个高度平面的流场。PIV 系统中,图像采集像素设置为5 120 pixel×3 800 pixel,相邻2 帧图像的时间间隔为0.125 s。实验流程与污物汇集特性实验相似,待系统运行30 min 稳定后,开启激光器,调整激光高度,相机开始采集图像。采集完成后调整激光高度进行下一组实验。
1.3 数据处理
污物汇集特性测量实验数据处理方法。分析t=0、10、20、30 min 时刻的养殖池内污物分布图像,系统比较分析不同进水管设置角度下养殖池内污物分布随时间的变化规律。为了进一步定量分析进水管设置角度对养殖池内污物汇集的影响,选取t=30 min 时刻各角度工况下养殖池污物图像进行分析。使用MATLAB 软件对原始图像进行二值化处理(残留污物图像设置为黑色),将污物与养殖池底面背景分离,统计黑色像素个数[15-16],从而实现定量分析污物残留量(养殖池自清洗能力)的目的。
流场分布特性测量实验数据处理方法。通过直接相关法分析PIV 图像,得到不同进水管设置角度工况下4 个高度水层的流场图。为了进一步系统比较不同工况下养殖池内水动力特性,基于养殖池内平均流速vavg和速度分布均匀系数DU50[17]养殖池阻力系数Ct[7]等水动力学特征量对流场进行定量分析,相关表达式:
式中,v表示平均加权速度(m/s);vi为监测点的速度(m/s);ri为监测点距池心的距离(m);DU50为养殖池内流速分布均匀系数,v50为某深度截面各点速度前50%的平均值(m/s),DU50大于0 小于100,接近100 代表速度越均匀,接近0 则表示速度均匀性较差;养殖池阻力系数Ct指养殖池对池内水流能量阻碍的量化表达,养殖池阻力系数越大代表进水管输入到养殖池能量损耗越多。Q为进水流量(m3/s);v1为进水速度(m/s);A为湿周,是过流断面上流体与固体壁面接触的周界长度(m);vavg为养殖池内平均流速,是养殖池内各测量点流速的平均值(m/s)。
2 结果
2.1 进水管设置角度对污物汇集的影响
图2 显示了不同进水管设置角度下污物汇集过程,从左到右为养殖池内污物汇集分布随时间(t=0、10、20、30 min)的变化过程图,从上到下为养殖池内污物汇集分布随进水管设置角度(0°、10°、20°、30°、40°、45°、50°、60°及70°)的变化过程图(图2)。
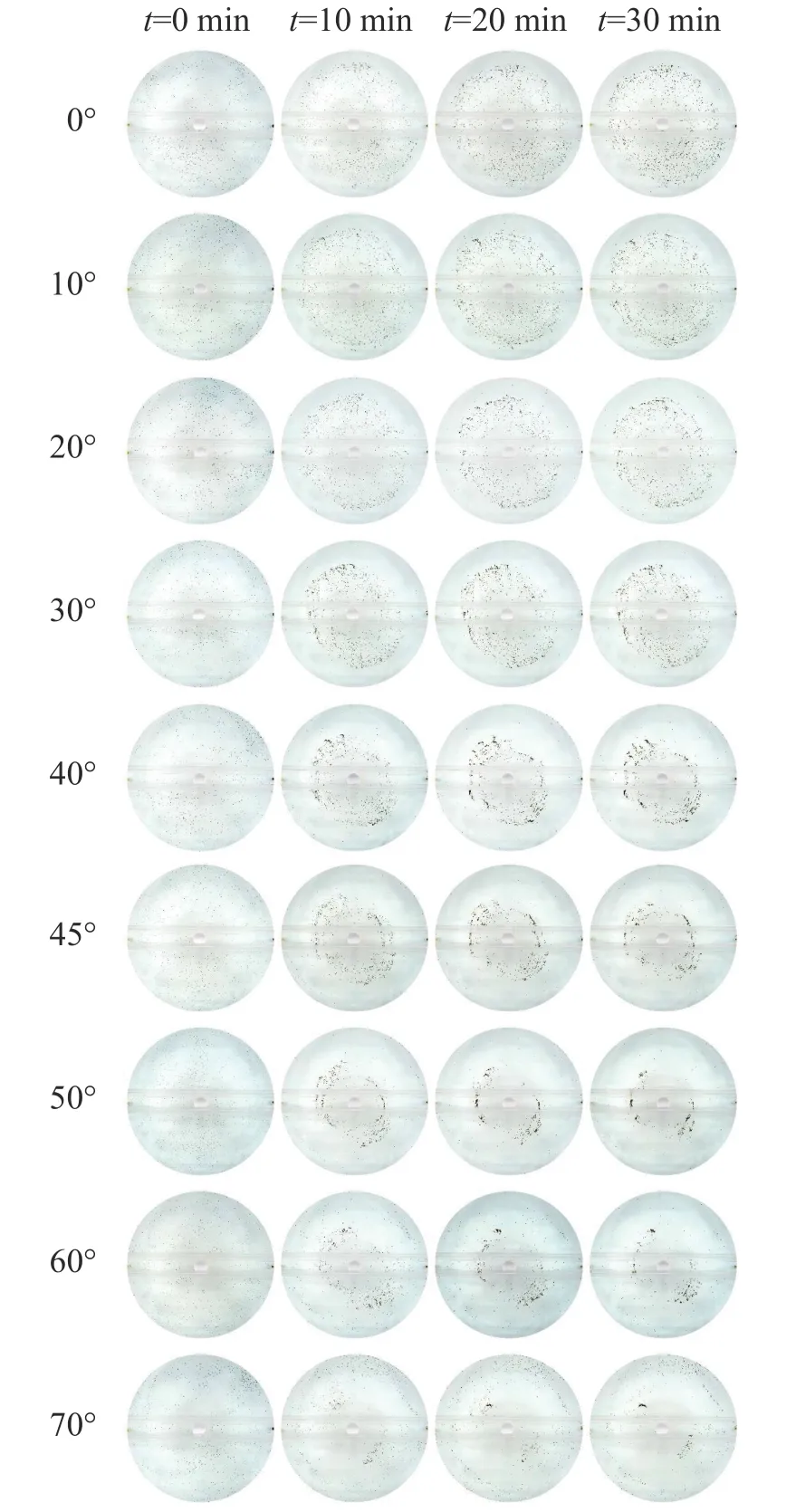
图2 不同进水管设置角度下污物汇集过程Fig.2 Image of solid waste distribution with different inlet angles
不同进水管设置角度下,养殖池内污物汇集过程与趋势不同,从而导致最后的污物汇集效果也不相同。从不同时刻养殖池内污物残留分布可以看出,①进水管设置角度在0°~30°工况时,污物一般是从靠近池壁的区域逐渐汇集到中间区域,排水口附近区域在养殖池环流和排污口吸力的共同作用下,流速较大,靠近排污口的污物随高速水流直接排出养殖池。最终大部分污物都汇集在养殖池的中间区域呈环状分布,且随角度的增大环状区域面积(残留污物)减少;②进水管设置角度在40°~50°工况时,污物运动汇集规律与0°~30°工况相似,但是汇集在养殖池中间区域的环形污物区大幅度缩小,污物汇集效果明显增强;③进水管设置角度在60°~70°工况时,在射流的驱动下,污物一部分向靠近池壁的外侧运动汇集,一部分向中间区域运动,在池内形成了靠近池壁和靠近排水口的两个污物汇集区域,污物汇集效果稍优于0°~30°工况。
为了进一步衡量进水管设置角度对养殖池自清洗能力的影响,对t=30 min 时刻养殖池内污物图像按照“数据处理”中的数据处理方法进行定量分析(图3)。在双管贴壁进水模式下,污物残留量(像素点个数)随进水管设置角度的增大先减小后增大,污物残留量在0°~50°工况范围内逐渐减少,在50°~70°工况范围内逐渐增大,在50°工况时污物残留最少,养殖池自清洗能力最优。
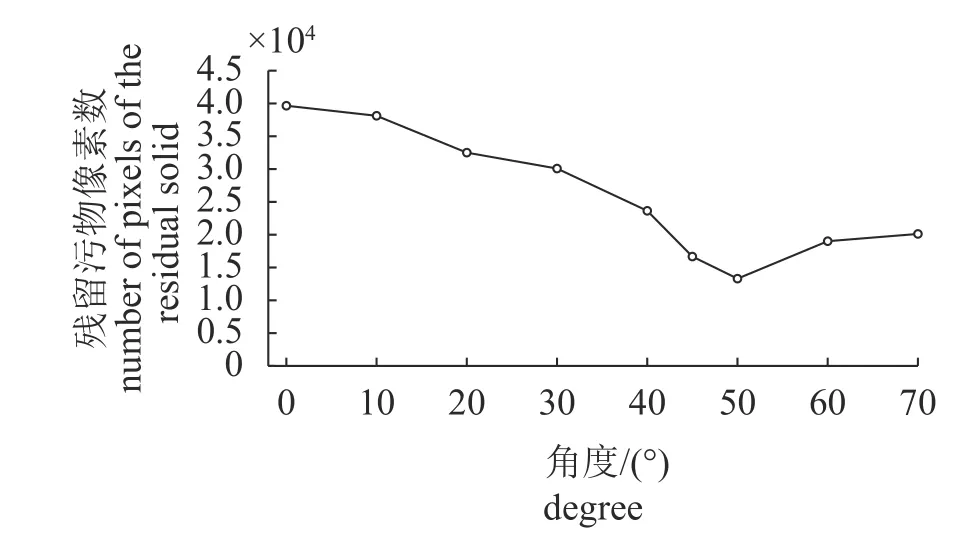
图3 t=30 min 池内污物残留像素点个数Fig.3 Number of pixels of the residual solid wastes at t=30 minute
2.2 进水管设置角度对流场的影响
流场特性与养殖池自清洗能力密切相关,流速大小是污物能否起动的关键,流态影响污物的运动汇集方向[17-18]。不同进水管设置角度下不同高度水层流场(图4),从左到右为养殖池内流场分布特性随水层(底层、近底层、中层、上层)的变化过程图,从上到下为养殖池内流场分布特性随进水管设置角度(0°、10°、20°、30°、40°、45°、50°、60°、70°)的变化过程图。图中黑色的圆代表养殖池边壁,养殖池左右两侧的黑色长箭头代表进水管的设置角度(射流方向),养殖池内黑色箭头方向代表该处流速方向,为了更清晰地显示环流特性,并未在图中画出所有测量点的流速矢量箭头。
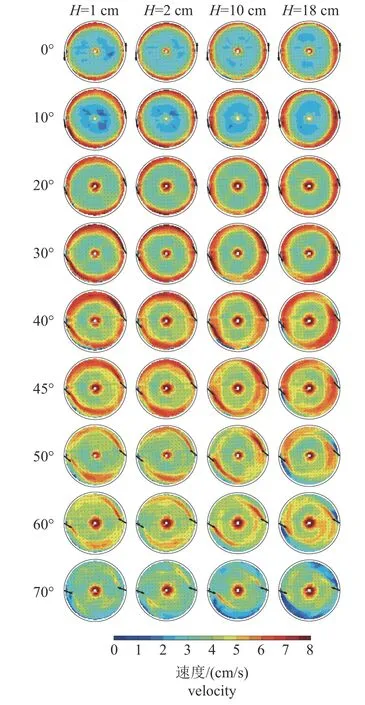
图4 养殖池内流场分布特性图Fig.4 Flow field in the aquaculture tank
PIV 流场测量实验需要将激光射入养殖池(图5),激光从养殖池的一侧射入,靠近激光器处的边壁处的激光强度较强,图像曝光过强,导致养殖池该侧靠近边壁处流速难以准确测量;激光强度在水体中被逐渐削弱,远离激光器下侧边壁处激光强度较弱,示踪粒子不够清晰,导致养殖池该侧靠近边壁处流速难以准确测量。此外,激光照射在两个进水管处产生折射和反射,图像曝光过强,导致进水管附近流速难以准确测量。因此,距离养殖池内壁4 cm 范围内(图中黑色圆内侧的白色区域)的流速不再深入分析。

图5 PIV 流场采集实验图图中箭头代表激光入射方向。Fig.5 Image of PIV measurementthe arrow in the image represents the direction of laser.
同一进水管设置角度工况下,底层、近底层、中层、上层四个水层内的流场分布基本一致(图5),说明沿水深方向养殖池内流场均匀性较好,流速梯度不大。考虑到养殖池内污物运动汇集与底层流场密切相关且各层流速分布基本一致,因此将着重分析养殖池底层流场特性。从图4 中可以看出不同进水管设置角度工况下,养殖池底层流场特性既有相同又有差异:①不同进水管设置角度工况下,在进水口冲击和排水口吸力的共同作用下,养殖池内均可以形成环流;②进水管设置角度在0°~10°工况时,进水口高速水流刚流出时就与池壁碰撞,跟随池壁的弧状形成环流,水流在跟池壁的接触碰撞过程中损失了大量能量,只在养殖池贴近池壁处形成了高速环流,排水口附近区域高速流场面积较小;③进水管设置角度在10°~45°工况时,进水管设置角度与养殖池内整体环流流向的夹角增大,进水口高速水流与池壁的碰撞摩擦减弱,养殖池池壁附近高速环流区域面积随进水管设置角度的增大逐渐增大,水流向心速度分量增大导致高速环流区逐渐向养殖池中间区域迁移,贴近池壁区域流速逐渐减小,排水口附近区域高速面积也逐渐增大;④进水管设置角度在45°~70°工况时,进水管设置角度与养殖池内整体环流流向的夹角持续增大,进水口高速水流与池壁的碰撞摩擦很弱,但是进水口高速水流与整体环流相互碰撞,导致养殖池内高速环流区域(尤其是靠近池壁区域)面积骤减,养殖池整体流速减小,进水口高速水流与排水口距离变小,导致排水口附近区高速区域面积增大。
2.3 进水管设置角度对水动力特性的影响
利用PIV 测量养殖池内流场,能够记录养殖池内PIV 标记点的速度矢量信息[13-14],基于这些信息可以对养殖池内水动力特性进行定量分析。计算得到9 个不同进水管设置角度工况下不同高度水层的vavg(图6)。从图中可以清晰地看出不同高度水层的平均流速较为接近,没有明显的速度差。养殖池底层水流与池底壁面摩擦会损耗底层流场的动能,导致底层流场流速略低于其上层的流速。4 个水层内的平均流速随进水管设置角度变化的趋势相同,均随进水管角度的增大先缓慢增大后缓慢减小,在40°~45°工况时达到最大,在70°工况时达到最小值。上述结果表明,进水管角度设置为40°~45°工况,养殖池内的平均流速最大,有利于污物的起动以及汇集排出。
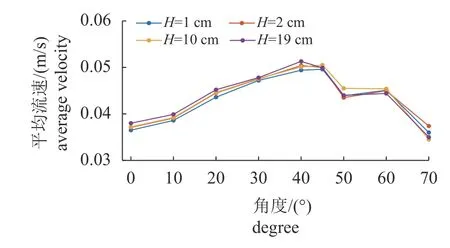
图6 不同进水管设置角度下养殖池内平均流速Fig.6 Average velocity in the tank with different inlet angles
根据公式(1)计算得到9 个不同进水管设置角度工况下各水层的速度分布均匀系数(图7)。从图中可以看出不同高度水层的流场均匀性较为接近,近底层和中层流场均匀性略好于底层和上层流场均匀性。4 个水层的速度分布均匀系数随进水管设置角度的变化趋势相同,均随进水管设置角度增大而增大。在0°工况达到最低值,在60°工况达到最大值。上述分析表明,进水管设置角度在45°工况时养殖池内不同高度水层速度分布均匀系数差异最小,当进水管设置角度在60°工况时,养殖池内流场均匀性最好。

图7 不同进水管设置角度下养殖池内速度分布均匀系数Fig.7 Uniformity coefficient of velocity with different inlet angles
根据公式(2)计算得到的9 个不同进水管设置角度工况下养殖池的阻力系数(图8)。养殖池阻力系数的变化趋势与池内平均流速恰好相反,随进水管设置角度的增大先减小后增大,在进水管设置角度为40°~45°工况时达到最小值,在70°工况时达到最大值。以上结果表明,进水管角度设置为40°~45°工况时,养殖池的阻力整体较小,这也验证了上一小节的结果,养殖池内的平均流速在进水管角度设置为40°~45°工况时取得最大值。
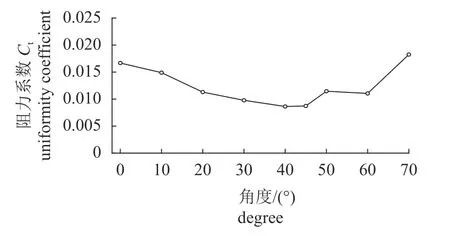
图8 不同进水管设置角度下养殖池内阻力系数Fig.8 Resistance coefficient of the tank with different inlet angles
3 讨论
循环水养殖的核心是通过高效的水处理工艺使系统内的水体能够循环利用,而系统内水体的主要污染源是养殖过程中饲料残留产生的残饵以及养殖对象产生的粪便等污物。污物长时间残留在池内会分解产生氨氮等有害物质并消耗溶解氧,严重影响养殖对象安全且极大地增加水处理负荷[19]。因此,如何快速高效地将养殖池内的残饵粪便等沉性颗粒污物排出养殖池是循环水养殖需要解决的首要问题。相比人工吸污等方法,通过合理地设置养殖池的进水结构,构建能够将污物自动“带出”养殖池的流场,即构建具有优异的自清洗性能的养殖池,是解决该问题的首选方案。
已有的研究主要通过比较养殖池内污物的残留量,直接量化养殖池的自清洗性能[11-12]或者比较养殖池内的流场特性,间接量化养殖池的自清洗性能[20-21]。本实验综合上述2 种方法,系统地开展了不同进水管设置角度工况下养殖池内污物运动汇集特性以及相应的流场特性研究。当进水管设置角度为45°~50°时,养殖池内污物残留量均较少且相差不大。60°~70°这2 个角度工况下,养殖池内部分区域的污物出现了明显的堆积,难以精准量化。综合考虑上述结果,本研究认为进水管设置角度在45°~50°时,养殖池具有较好的自清洗性能,池内的污物能够较好地排出。此外,除流速均匀系数外各水动力特征量都在40°~50°工况下取得最优值,因此需要综合养殖池多个水动力特征量并结合养殖池污物汇集试验结果,才能更合理地比较养殖池自清洗性能的优劣,很难从单个水动力特征量直接衡量养殖池的自清洗性能。本研究中水动力特征量在计算的过程中并不包含距离养殖池池壁4 cm 范围内的流速,这也可能是各水动力特征量并不是都在45°~50°工况下取得最优值的一个原因。
赵乐等[11]通过物理模型试验研究了进水管设置角度对方形圆弧角养殖池内污物运动汇集的影响,结果表明,双管贴壁进水模式下进水管设置角度为40°时,污物汇集效果最优。需要指出的是,该实验中没有设置进水管角度为45°的工况。任效忠等[22]通过物理模型实验研究了进水管设置角度对方形圆弧角养殖池内平均流速的影响,结果显示在弧壁处单管和双管贴壁进水模式下,池内平均流速随进水管设置角度的增大先增大后减小,进水管设置角度为50°时池内水体平均流速最高,流场分布特性最优。Venegas 等[20]通过物理模型实验测量并计算了单孔喷射器进水模式下,进水管设置角度为0°和45°时,圆形养殖池内的饲料排出养殖池的耗时以及水动力特征量,结果表明养殖池的综合性能在45°工况时优于0°工况。综合上述以及本文的研究结果可以发现,进水管设置角度是影响养殖池内污物汇集效果与流场分布特性的重要因素。本研究的圆形养殖池在双管贴壁进水模式下,进水管设置角度在45°~50°时,养殖池可以取得良好的自清洗性能。
向养殖池内撒入沉性颗粒饲料(污物替代物),然后观察记录污物的运动汇集过程是研究养殖池自清洗能力的最直观有效的方法。然而,已有的研究在试验方法方面尚有不足。赵乐等[11]以及桂福坤等[12]在水循环系统启动之前将饲料撒入养殖池,然后再开启水循环系统,这与实际循环水养殖情况不符。实际养殖中,循环水系统一般一直处于运行状态,残饵粪便等污物也都是在循环水系统运行过程中产生的。Venegas 等[20]和Davidson 等[8]是在循环水系统运行状态下,向养殖池内撒入颗粒饲料,观察饲料的运动过程并记录其排出养殖池的耗时。然而,Venegas 等[20]在实验中将10 粒颗粒饲料从距离池壁10 cm 处的1 个位置撒入养殖池;Davidson 等[8]在实验中将1 粒颗粒饲料从距离池壁0.6 m 处的1 个位置撒入养殖池。以上操作都与实际养殖情况不符,养殖过程中残饵粪便是随机产生的,并不集中于某一固定点位。基于此,本研究在进行污物汇集试验时将颗粒饲料在水循环系统稳定运行过程中,均匀且较密集地撒入养殖池中,以期更符合实际生产工况。但是本研究中t=30 min 时刻养殖池内残留污物产生了堆积现象,导致利用图像处理量化污物残留量时影响图像处理的准确性,后续研究中需要对此进行改进。
养殖池内流场分布特性可以间接评价养殖池自清洗性能优劣,阐释污物运动机制。Gorle等[21]和仁效忠等[22]利用ADV 流速仪测量养殖池内流场分布特性,在测量时存在布点密度低、ADV 接触水流影响养殖池内流场等缺点,难以准确显示养殖池内流场的分布特性。基于此,本研究利用PIV 技术测量了养殖池内的流场情况,PIV 技术在测量时不扰动流场,可在同一时刻记录整个流场的信息,提供丰富的流动空间结构[23-24]。因此,通过PIV 技术测量养殖池内流场,可以更全面地了解养殖池内整体流场的分布特性。
养殖池内水体旋转产生的二次流是影响养殖池自清洗能力的另一个主要因素[25],进水管设置角度通过影响养殖池底部二次流强度进而影响养殖池的自清洗性能[25]。但是相较于养殖池内主环流,二次流流速较小且贴近养殖池侧壁和底部,较难观察与测量,因此本研究未量化进水管设置角度对养殖池内二次流的影响。后续研究中,可以通过改进试验装置以及采用高精度PIV 设备对养殖池内产生的二次流现象进行系统深入的研究。
4 结论
本研究通过实验探究了进水管设置角度对养殖池的自清洗能力和流场分布特性的影响,主要研究结论:
①进水管设置角度会明显影响圆形养殖池的污物汇集效果,养殖池内污物汇集能力随进水管设置角度的增大先变好后变差,进水管设置角度在45°~50°工况时污物汇集效果最好。
②进水管设置角度会明显影响养殖池流场分布特性,高速环流区域面积随进水管设置角度的增大先增大后减小,高速环流区域随进水管设置角度的增大逐渐向养殖池中心迁移,进水管设置角度在45°~50°工况时高速环流区域面积最大。
③养殖池内平均流速随进水管设置角度的增大先增大后减小,阻力系数与平均流速呈现负相关性,流场均匀性整体随进水管设置角度增大先增大后减小。综合考虑养殖池内水动力特性,当进水管设置角度在到45°~50°工况时,养殖池内平均流速高,阻力小,流场相对均匀,是比较理想的进水管设置角度。
综合养殖池内污物运动汇集特性以及养殖池内水动力特性,进水管设置角度在到45°~50°工况时养殖池自清洗能力最强。
(作者声明本文无实际或潜在的利益冲突)
猜你喜欢
特种结构(2023年6期)2023-12-31 04:35:52
江苏建材(2023年5期)2023-06-06 20:31:44
渔业致富指南(2022年1期)2022-11-05 03:46:04
南方水产科学(2022年4期)2022-08-23 07:36:42
当代水产(2021年6期)2021-08-13 08:17:34
海洋通报(2021年1期)2021-07-23 01:55:38
家电科技(2018年7期)2018-08-06 05:52:56
橡塑技术与装备(2018年14期)2018-07-20 03:21:58
山东农业大学学报(自然科学版)(2015年5期)2015-02-21 03:48:00
发明与创新·中学生(2014年6期)2014-07-16 15:45:07
