
下肢外骨骼柔性踝关节设计及助力研究
2024-03-25 09:15何谦郁祉杰叶礼贤张旭辉
机械工程师 2024年3期
何谦,郁祉杰,叶礼贤,张旭辉
(湖南师范大学工程与设计学院,长沙 410081)
0 引言
下肢外骨骼作为一种智能助力设备,已成为机器人领域的研究热点之一。其中康复型下肢外骨骼主要用于帮助老年人以及下肢有运动障碍的患者,进行日常行走或康复训练。目前市面上大多数康复型下肢外骨骼在关节处多数采用纯刚性结构,在实际行走过程中存在着姿态僵硬、所受冲击过大等问题,极大影响系统的稳定性和用户使用的舒适度[1]。
下肢外骨骼的髋、膝、踝3个关节中,踝关节由于距离地面最近,所承受的冲击载荷也最高,因此有效改善其受力状况不仅能降低其他关节的负荷和驱动能耗,更能极大地提升整机的柔顺性。目前市场上较为成熟的产品中(如美国伯克利仿生技术公司的eLegs、以色列的Rewalk、日本的HAL系列以及瑞士的LOKOMAT等[2-5]),踝关节均采用纯刚性结构,存在行走时关节冲击力矩大、舒适度不够理想等问题,容易导致人体踝部疲劳,影响康复效果[6-7]。哈佛大学设计了一款绳索驱动的柔性踝关节,由电动机驱动绳索拉紧弹簧,帮助踝关节跖屈[8];Walsh等研制了由脚跟弹簧、阻尼器、离合器被动助力的下肢外骨骼,有效减少穿戴者运动时的能量消耗[9];国内Zheng等[10]在此基础上增加减速器拉动鲍登绳和优化弹簧刚度,帮助踝关节转动,有效降低了电动机的峰值功率。由于该类型的柔性设计方案只能在踝关节跖屈时提供驱动力,而无背屈助力,因而系统灵活性和用户舒适度都有待提升。
针对上述问题,本文提出了以气弹簧作为被动驱动的柔性踝关节结构方案,实现了踝关节背屈时助力;通过动力学建模以及虚拟样机仿真,验证了该设计不仅能有效改善关节受力,更能在一定程度上降低系统能耗。
1 柔性踝关节结构设计
人体踝关节主要由胫骨、腓骨和距骨构成,属于滑车关节,该结构具有3个自由度。足踝后部的跟腱连接着小腿腓肠肌和跟骨结节,是一种被动弹性结构,通过伸缩来储存和释放能量,达到助力目的[11]。本文设计的柔性踝关节结构如图1所示,在小腿内杆上设置了弹簧阻尼器,小腿内杆下部设有螺纹孔,用于固定弹簧支撑和踝关节支撑。轴承套设于踝关节转轴上,外圈与踝关节支撑固定。通过踝关节连接件绕着踝关节转轴转动,实现足部的跖屈和背屈。踝关节支撑上设置了机械限位块,用于限制关节的运动范围,以保证穿戴者的安全。气弹簧两端分别与弹簧支撑和踝关节连接件连接,与人体跟腱并行工作,能吸收行走时足底所受的刚性冲击,改善关节受力。
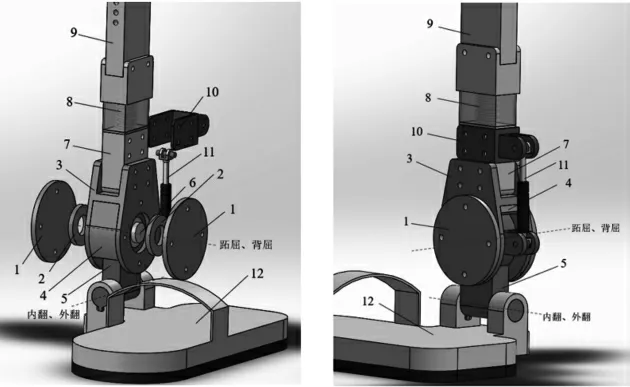
图1 踝关节结构示意图
如图2所示:双腿直立时,气弹簧处于自然伸长状态;踝关节跖屈时,气室体积减小,压强增大,气弹簧吸收能量;在向直立状态过渡时,气室体积逐渐增大,气弹簧释放能量;由直立状态转变为背屈时,气弹簧反向拉伸,储存能量。
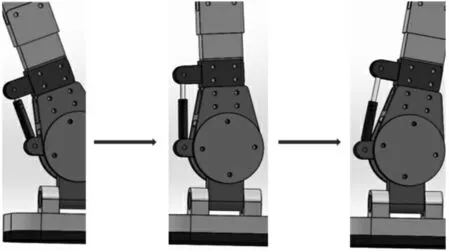
图2 踝关节跖屈(左)、直立(中)、背屈(右)
2 踝关节动力学建模
2.1 踝关节支撑阶段动力学模型
如图3所示,设气弹簧自然伸长时的长度为H0,当前状态下的长度为H,刚度系数为k。足底与弹簧和小腿两交点间的距离为a1,小腿与弹簧和足底两交点间的距离为a2,小腿与足底所成的夹角为θ,θ最小值为θmin,最大值为θmax,弹簧与足底所成的夹角为α。
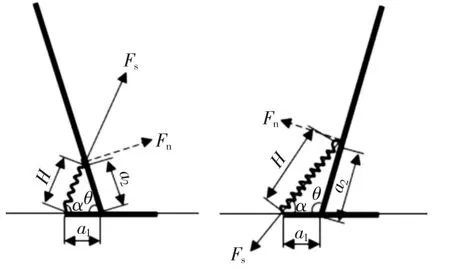
图3 支撑阶段释能(左)储能(右)模型
由余弦定理得到任意时刻的弹簧长度:
则当前状态下弹簧的压力为
α可表示为
弹簧作用到小腿杆上垂直方向的力为
在单腿支撑阶段,气弹簧的拉压力可转化为使小腿杆绕踝关节转动的转矩τ:
2.2 踝关节抬腿阶段动力学模型
图4所示为抬腿阶段踝关节动力学模型,此时气弹簧由拉伸状态逐渐缩短至自然状态,在此过程中,弹簧的拉力可等效于使小腿绕着足尖与地面的接触点旋转的转矩。
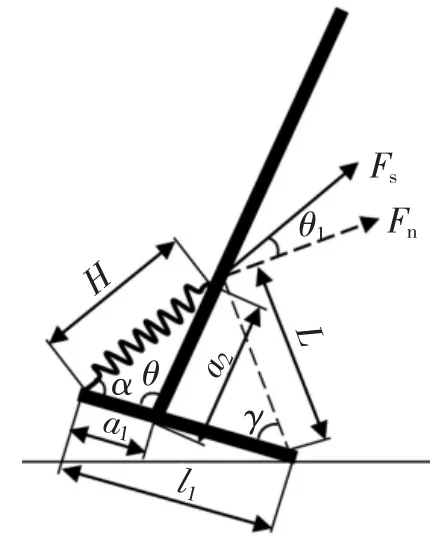
图4 抬腿阶段释能模型
设气弹簧与小腿的交点与足尖之间的连线为L,L与足底所成的夹角为γ。则有:
又:
Fs与Fn所成的夹角θ1为
此时,气弹簧的力矩为
经过求解得:
2.3 踝关节摆动阶段动力学模型
图5所示为单腿进入摆动阶段时踝关节的受力。此时足部与地面分离,气弹簧只能靠人体进行压缩,在此阶段时,踝关节所受力矩会增大。
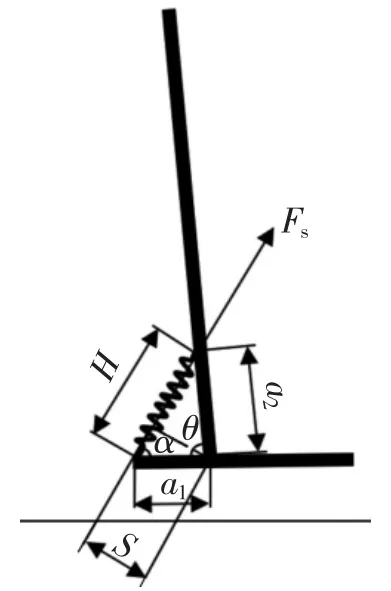
图5 摆动阶段储能模型
弹簧压力到矩心的距离为
则力矩为
经过整理,可得一个步态周期内被动气弹簧完整的动力学模型:
3 动力学仿真分析
3.1 柔性踝关节助力验证
要研究弹簧刚度对关节力矩的影响,需要取不同的参数进行仿真试验。以10 N/mm为间隔,在10~100 N/mm内取10组弹簧刚度,阻尼系数为对应刚度数值的1/100,经过动力学仿真,各关节力矩如表1所示。
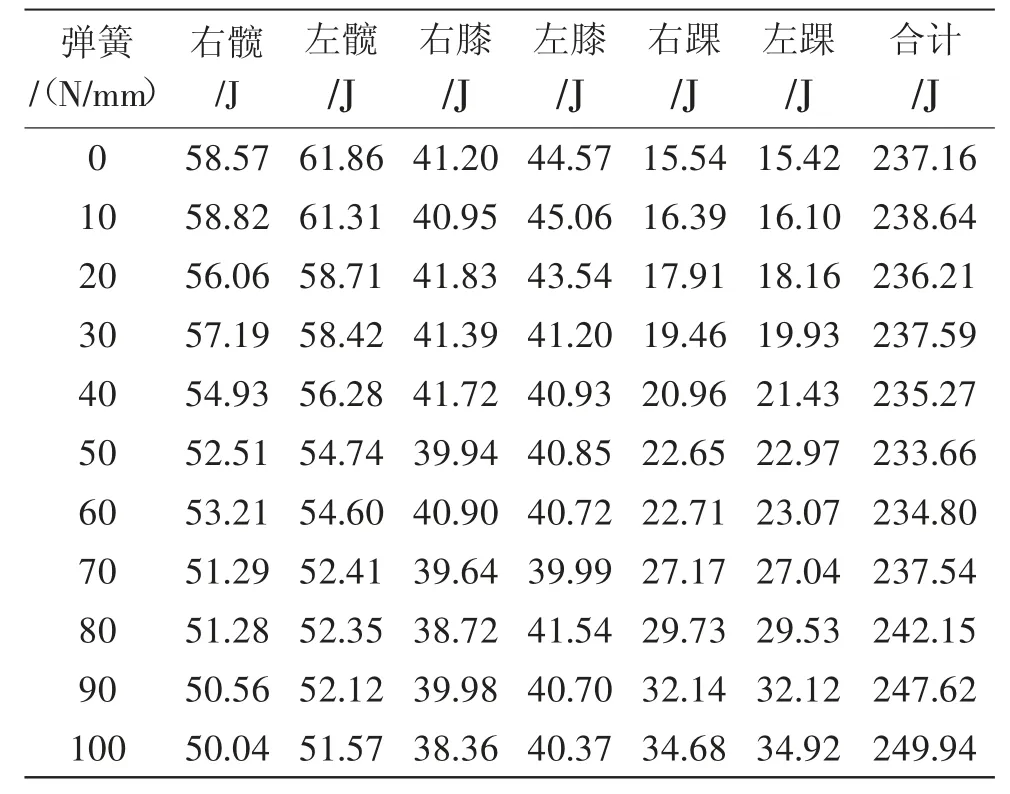
表1 不同弹簧刚度参数下各关节的功耗
从表1中数据可知,当弹簧刚度小于70 N/mm时,总能耗小幅下降,而大于70 N/mm时,总能耗明显呈上升趋势,因此弹簧的最佳刚度值,在0~70 N/mm内选取。在此范围内,随着刚度递增,髋关节的功耗显著下降,而膝关节下降幅度相对较小。由于在摆动阶段,踝关节需要将弹簧撑开,其功耗也会随之增大。最终确定最佳参数还需要考虑弹簧的缓冲减震效果以及对踝关节受力的影响情况。
经过多次仿真试验及分析,最终选定50 N/mm为气弹簧的最佳参数。由于气弹簧在踝关节跖屈时的助力,髋、膝关节的功耗比未添加气弹簧时降低了8.8%。在仿真起始时刻和支撑腿切换时刻与无气弹簧时的力矩对比如图6所示,曲线1为无气弹簧时的力矩,曲线2为弹簧刚度为50 N/mm时的力矩。曲线1在t=0时,右腿与地面碰撞,各个关节的瞬时转矩激增,右髋为312.2 N·m,右膝为172.21 N·m,右踝为138.82 N·m。曲线2右髋为96.15 N·m,右膝为45.43 N·m,右踝为12.21 N·m,分别为曲线1的30.8%、26.4%和46%;同理,左髋、左膝和左踝,在t=5 s时刻,有气弹簧时的力矩为无气弹簧时的37.8%、29.5%和43.3%,各关节平均减少了64.4%的冲击力矩。
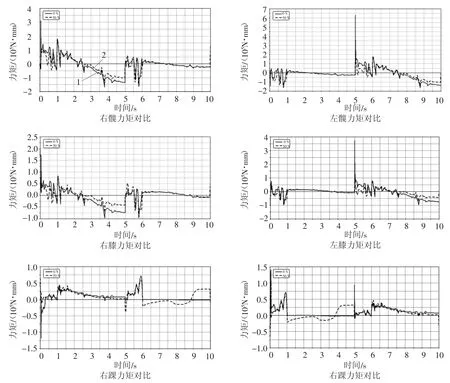
图6 各关节力矩对比
3.2 虚拟样机仿真
参考人体CGA[12]数据,为外骨骼各关节的运动规划角度函数,如图7所示。
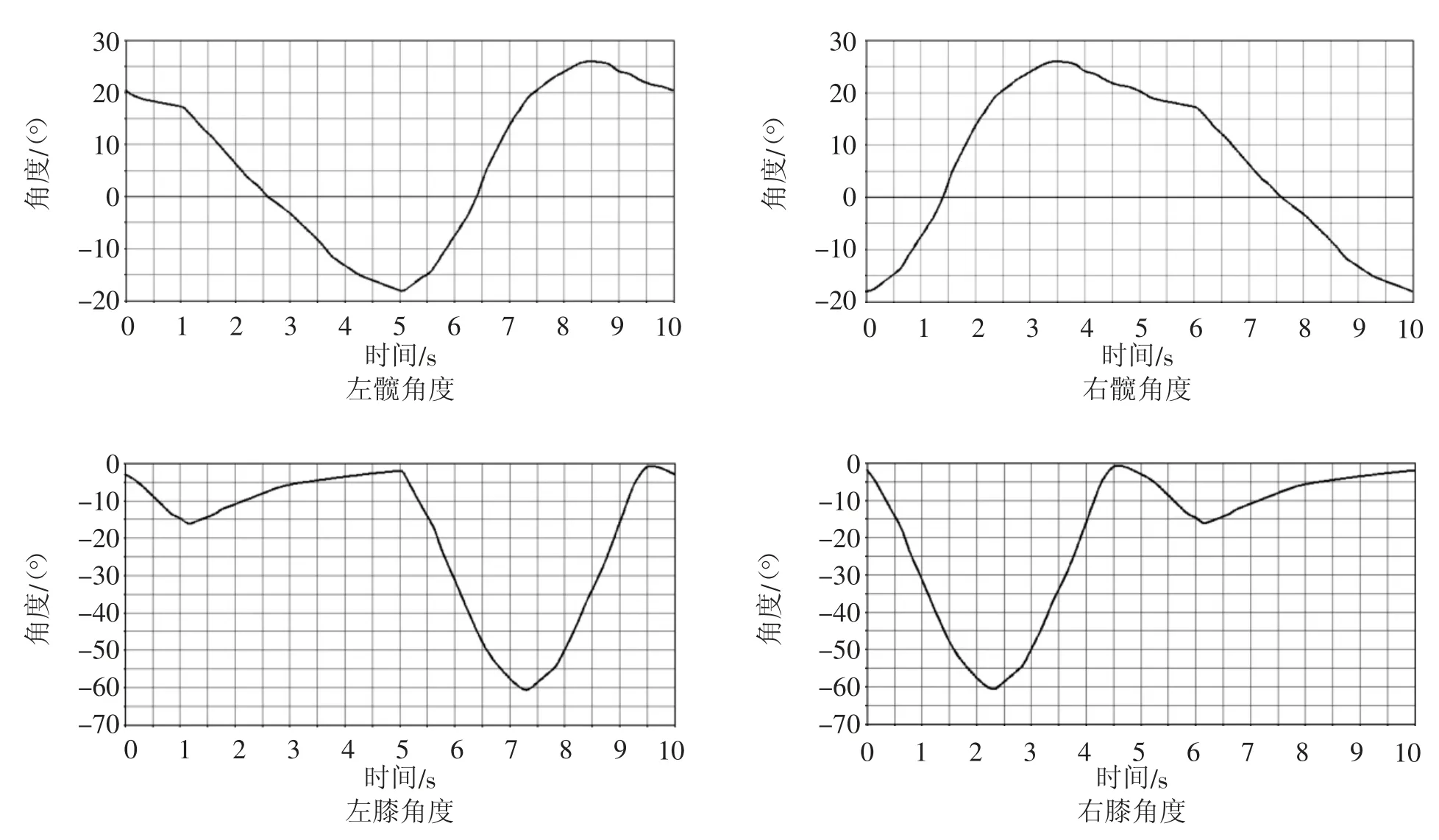
图7 各关节运动角度函数
通过SolidWorks将人体与外骨骼的三维模型导入ADAMS中,建立虚拟样机模型。给模型各零部件添加材料属性、约束、运动副、驱动,设置足底与地面的碰撞函数、摩擦力等。将仿真时间设置为10 s,帧数为500帧,仿真过程中人机系统的运动步态如图8所示。从图7中可以看出,人体与外骨骼各关节运动流畅,具有良好的耦合性。
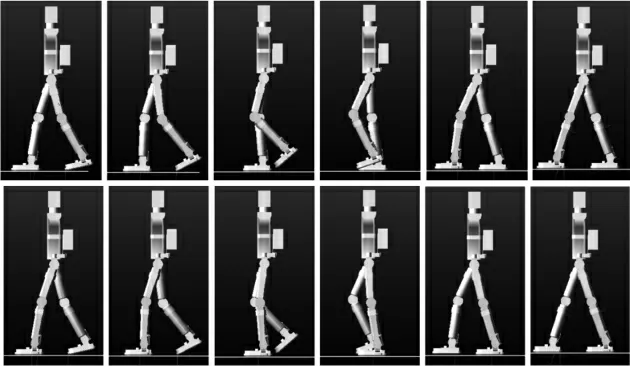
图8 人机系统步态仿真
4 结论
提出了一种柔性踝关节外骨骼的设计方案,通过建立踝关节气弹簧的力学模型,分析了气弹簧的助力过程。经过对比弹簧不同参数下的动力学仿真试验,得到最优刚度为50 N/mm时,外骨骼各关节平均减小了64.4%的冲击力矩,主动关节的驱动电动机降低了8.8%的能耗。仿真结果表明:气弹簧被动驱动的柔性踝关节,有效减小了各关节在步态转换时所受的刚性冲击,同时实现了在踝关节背屈时助力,并降低了各关节在步行过程中所需的力矩。
猜你喜欢
军事文摘(2024年6期)2024-02-29
工程技术与管理(2021年13期)2021-08-23
科学与信息化(2021年20期)2021-08-05
小哥白尼(野生动物)(2021年12期)2021-03-29
基层中医药(2021年5期)2021-03-26
高师理科学刊(2020年2期)2020-11-26
中成药(2018年10期)2018-10-26
凿岩机械气动工具(2017年3期)2017-11-22
实用手外科杂志(2015年1期)2015-08-27
专用汽车(2015年4期)2015-03-01
