基于不同流向算法的地形湿度指数模型差异性分析
2024-03-24 09:02唐瀑漾罗明良白雷超刘晋红
中阿科技论坛(中英文) 2024年3期
唐瀑漾 罗明良,2 白雷超 刘晋红
(1.西华师范大学地理科学学院,四川 南充 637009;2.西华师范大学嘉陵江流域研究所,四川 南充 637009)
土壤流失极难恢复,土壤侵蚀是制约地区可持续发展最严重的生态环境问题之一[1]。沟道侵蚀的特征、发育过程及形成机理研究一直是土壤侵蚀与沟蚀地貌学领域的热点[2]。目前基于数字高程模型(DEM)的应用越来越丰富,针对沟道识别算法模型的探究也越来越深入,相关研究主要集中于复合地形指数(CTI)、坡面面积(SA)、地形湿度指数(TWI)和坡面面积幂(SAP)4种地形指数模型的优化和运用[3]。有研究表明,TWI在实际运用中受到流向算法和数字高程模型(DEM)分辨率的影响较大[4-5]。然而,已有文献对于TWI模型的运用,少有同时考虑到其受不同流向算法和分辨率影响。因此,本研究以元谋干热河谷为研究区,基于高精度DEM为实验样本,运用4种流向算法(Rho8、D8、Dinf和MFD-md)定量化研究不同算法之间的差异性,进一步揭示不同流向算法的适用性。
1 研究区概况
研究区域位于云南省楚雄彝族自治州北部的元谋县黄瓜园镇小雷宰村秃秃脊梁子,经纬度范围在101°35'E~102°069'E,25°23'N~26°06'N,海拔980~1 400 m。该区域内土壤类型以燥红土和变性土为主,并且土壤与岩石胶结性差,易受侵蚀[6-7]。实验样区流域面积1 875.39 m2,在该区域内部发育着由沟蚀作用形成的大量侵蚀沟,本文选取其中一条沟道(见图1),该沟道水沙输送情况明显,坡面存在大量细沟。
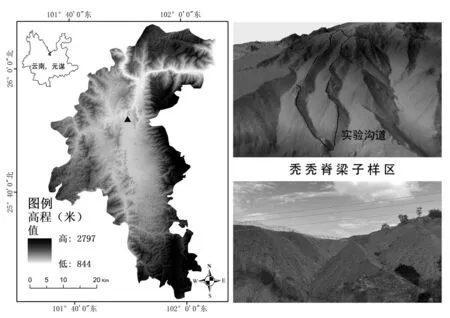
图1 实验样区图
2 数据与方法
2.1 数据采集及处理
数据主要来源于对元谋干热河谷的典型沟道区域的野外踏勘,基于D200飞马无人机进行激光点云数据的实测收集 。无人机的模块选择为D-LiDAR300模块(测量精度为5 cm)、D-OP320倾斜模块,同时用实时动态差分仪(real-time kinematic,RTK)进行校正。通过对0.05 m高分辨率的DEM数据处理,用CUBIC三次卷积插值重采样方法得到0.05 m、0.1 m、0.2 m分辨率的三组DEM数据。利用ArcGIS和SAGA软件对数据进行运算,最终得到不同流向算法在不同分辨率下的TWI示意图。
2.2 地形湿度指数模型
地形湿度指数(topographic wetness index,TWI)是基于DEM对径流路径长度、产流面积等的定量描述,能够用来方便地模拟理想状态下流域内每点土壤水分的干湿状况的模型[8]。其应用最为广泛的计算公式如下:
2.3 流向算法
流向算法可分为单流向算法(single flow direction algorithm,SFD)和多流向算法(multiple flow direction algorithm,MFD)[9],其中单流向算法认为每一格网单元本身产生的流量及其上游流量都会流向其下游唯一的相邻单元;多流向算法认为水流分布具有分散性质,每一格网单元的流量并不是全部流入某一下游格网,而是流入比其低的所有或部分下游格网单元[10]。本研究中选择了单流向算法中常见的Rho8、D8,以及多流向算法中的Dinf、MFD-md,如表1所示。

表1 本文选用的流向算法及其原理
3 结果与分析
3.1 不同分辨率DEM下的TWI
本研究针对不同分辨率的数据进行处理,利用4种流向算法取得秃秃脊侵蚀沟样区的TWI的分布图,如图2所示。

图2 秃秃脊侵蚀沟样区TWI细节及整体分布图
从图2可以看出,由单流向算法到多流向算法,TWI分布图展示趋势由线到面,由细小沟变为细沟汇水趋势面。在相同分辨率下,单流向算法所得TWI分布图中水流路径细密,其中D8算法出现较多平行水流路径,Rho8算法下水流路径散乱无章;多流向算法所得TWI分布图呈平滑的趋势面,可以展示整体汇水趋势情况,且简化了部分局部信息,表达沟道时有一定主次。
分辨率差异使得沟道的表达效果不同。利用高精度的DEM计算得到的TWI分布图可以表现出地表细微变化,并且TWI细节图可以大致展示有植株区域(见图3)。对于完整的较长的百米侵蚀沟而言,分辨率下降之后TWI分布图能更明显地表现出沟的走势(如图2中0.2 m DEM整体图)。
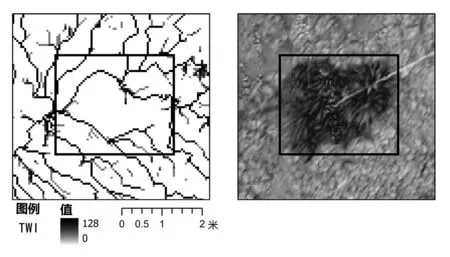
图3 TWI对植株的展示(以0.05 m DEM下Rho8算法为例)
3.2 TWI结果的分布特征
从表2可以看出,同一流向算法下的TWI平均值随分辨率的减小而增大。栅格变大的同时,算法预测分配到下游栅格的水量变大,形成径流的可能性也变大。相同分辨率下不同流向算法的极差接近,但分辨率下降极差明显下降。相同算法下,分辨率越高,标准差越大,这说明在高分辨率DEM下的TWI值分布更分散,分辨率会显著影响TWI值的离散程度。

表2 秃秃脊侵蚀沟样区TWI分布特征
单流向算法中D8算法的标准差小于Rho8算法,多流向算法中Dinf算法的标准差小于MFD-md算法,这是因为Rho8和MFD-md算法随机性更强,造成更明显的离散性。4种算法均为过度峰度、正偏态,峰度、偏度均随着分辨率的降低而增大。总体来说,不同算法下TWI值的空间统计特征差异小,不同分辨率下TWI值的空间统计特征差异更显著。
3.3 TWI的变化趋势
选择Akima样条曲线分析侵蚀沟的TWI频率和累积频率,得到了图4。不同分辨率下的频率变化趋势是大致相同的。累积频率在TWI值为1左右的时候出现趋于平缓的转折,频率在TWI值为0的时候出现下降转折,说明大于0值的栅格随着TWI值的增大,栅格数量减少,这符合汇流能力强的区域占侵蚀沟区域小部分的规律。通过分析TWI值在不同地形单元上的差异,按其分布规律可以将地形分成2个部分:非沟道区域和沟道区域。通过目视解译图2可以看出TWI的高值主要集中在沟道区域,而TWI的低值都出现在非沟道区域。结合图3对植被的表达和图4的TWI频率和累积频率可以考虑在TWI值大于0的情况下,该区域开始有汇流能力。这为利用TWI识别沟道的阈值界定提供了参考。
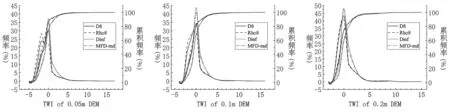
图4 不同分辨率下4种径流算法的冲沟TWI的分布频率图
4 结论
分辨率变化引起的差异在于:分辨率下降,栅格变大,算法预测出分配到下游栅格的水量变大,形成径流的可能性变大。这说明,不同大小等级的沟道在进行TWI计算的时候需要考虑其尺度效应。
算法变化引起的差异在于:(1)单流向算法中D8算法会得到较多的平行水流路径;Rho8算法所得水流路径散乱。(2)多流向算法都简化了部分局部信息,相较于单流向算法有一定的主次层序,能更好展示出研究区整体汇水趋势情况。这说明,识别坡面细沟时选单流向算法进行表达,识别切沟、冲沟等沟道走向时选多流向算法进行表达更加合理。
本研究仅选择了元谋的一条侵蚀沟样区,实验范围有限,需要进一步扩大实验样区以找到普适性规律。虽然TWI模型可以利用地形对土壤湿度空间分布的控制来提供关于侵蚀沟潜在位置的信息,从而能够识别沟道,但实际侵蚀沟的存在可能受到其他因素(土壤类型、土地利用和管理以及实际降雨特征等)的影响。例如,有植被的区域可以更好地维持土壤湿度,增加入渗,减少径流和土壤侵蚀潜力,所以有植被的区域将对模型产生影响。如果能将这些因素结合到TWI模型进行计算,该模型评估潜在沟道的准确性将会得到更大的提升,从而为相关保护规划和管理工作提供帮助。
猜你喜欢
中国果业信息(2022年9期)2022-11-19
中国林副特产(2021年6期)2021-12-21
井冈教育(2020年6期)2020-12-14
环境科技(2020年2期)2020-05-08
中国林副特产(2019年6期)2019-12-19
乡村地理(2019年2期)2019-11-16
瞭望东方周刊(2017年36期)2017-09-28
宝藏(2017年6期)2017-07-20
股市动态分析(2016年3期)2016-09-27
读者(2016年3期)2016-01-13