基于新型阵列的储罐底板声发射定位方法
2024-03-18 13:09龙飞飞钟时达
无损检测 2024年2期
龙飞飞,钟时达,李 铎
(1.大连民族大学 机电工程学院,大连 116000;2.大连市装备智能检测与诊断技术重点实验室,大连 116000)
声发射检测技术作为一种动态无损检测技术,可以在线对常压立式储罐进行检测且经济成本低、工作量小,故在国内得到了广泛应用[1]。声发射源定位作为声发射检测技术研究的重点难点,旨在对损伤位置进行精准定位,以进一步分析缺陷或损伤的严重程度,对潜在的安全隐患做出明确预警[2]。传统声发射源定位方法是将传感器直接均匀布置在储罐外壁上,在检测直径较大的储罐时,由于传感器布置距离罐底中心位置较远,对罐底中心位置附近声发射信号接收不佳,影响附近损伤的定位效果,而且容易出现漏定位和伪定位等问题,在传感器数量增多和阵列密度增加时缺点更加突出,这些问题严重影响了储罐腐蚀评价的效果[3]。
针对储罐底板中心区域信号接收效果不佳的问题,邱枫等[4]提出了在储罐内部介质中放置短基线网格拓扑结构的传感器阵列;李伟等[5]提出内置传感器阵列与罐壁外周传感器阵列相关联的检测方法,提高了中心位置的定位准确性。张颖等[6]运用移动式五元十字基阵声学定位方法,降低了检测盲区。 SALAMONE等[7]提出一种花形摆放的传感器阵列,能够预测波的传播方向,发现两个传播方向的交点就是声发射源的所在位置。针对漏定位、伪定位问题,陈园园[8]重点分析了定位信号构成及其影响因素,设计使用聚类算法来提高声发射事件识别准确率。ASAUE等[9]则利用深度学习和多层神经网络,自动提取特征数据来实现声发射源位置的快速精准计算。可以看出,国内外学者主要从定位阵列和定位算法两个方面进行研究,并在储罐腐蚀状态监测上取得了一定成果,但由于使用的传感器数量较多,存在的信息冗余会延长检测周期。
笔者针对传统声发射源定位算法的信号接收问题设计新型阵列,通过设计合适的传感器数量和间距,设计特殊的几何关系,结合阵列的优势进行定位算法研究,旨在相较传统定位阵列提升定位精度和可靠性,相较复杂阵列提升计算速度,以满足实际工程检测的需要。
1 新型阵列设计
在实际工程检测中,储罐声发射传感器常布置在靠近罐底的罐壁上,传感器的数量和布置方案是根据储罐的尺寸、型号进行确定的[10]。虽然这种阵列设计布置和程序设计都较为简单,但应用在大型储罐上时,受声发射信号幅值衰减等因素的影响,罐底中心位置的检测效果不佳。而短基线平面网格拓扑阵列理论上可以解决部分罐底中心位置信号丢失的问题,增强对罐底中心位置的定位效果,但该阵列算法设计难度很大,且对阵列布置精密度的要求较高,罐内的复杂情况也为预期信号增加了诸多不确定性。
笔者结合两种阵列的分布特点,从布置难度、信号接收覆盖率、对应定位算法的计算效率等方面综合考虑,确定了新型传感器的阵列构型。考虑到罐内传感器投放精度不高、检测速度慢、成本高等因素,尽量选用罐壁传感器。
首先设计出如图1(a)所示的8-8型双环形阵列,其能够满足对称性,在算法设计上具备优势,能够提升计算速度。但发现该阵列在罐底边缘的传感器密度小于罐底中心附近的,罐底边缘附近检测效果会受到影响,同时由于传感器布置在罐底1/2直径处,储罐直径较大时,可能造成中心位置信号接收效果不佳,影响定位效果。为了解决这一问题,笔者提出一种8-4-1型方形传感器阵列[见图1(b)],其在具备对称性的同时,通过在罐底中心位置布置传感器的方式来强化信号采集质量,但该阵列存在罐底边缘的传感器密度低而可能导致罐底边缘检测效果不佳的问题。综合上述分析,提出8-4-2-1型伞状定位阵列,其设计构型如图2所示。

图1 传感器阵列设计构型示意

图2 8-4-2-1型伞状定位阵列设计构型示意
该方法通过在罐底外圆均匀布置8个传感器,之后在2/3半径处,相互呈90°角布置4个传感器,再在1/3半径处相对布置两个传感器,一定程度上保证了获取信号的完整性,最后在中心位置布置1个传感器,加强对罐底中心位置的检测。该阵列的传感器分布能够在覆盖罐底并加强对罐底中心区域检测的同时,避免信号处理难度的增加,优化了定位效果,提高了定位精度,解决了传统阵列存在的问题。
2 新型阵列定位算法
2.1 定位算法研究
上文对传感器阵列进行了设计,因此最大事件定义时间的设置需要根据传感器的间距和几何布置进行灵活调整。8-4-2-1型定位阵列线段b位置示意如图3所示,当采用新型定位阵列时如果继续按照储罐直径进行最大事件定义时间设置,将会丧失新型阵列定位的优势。故,为了充分发挥其优势,此时最大事件定义时间定义为
(1)
式中:Tmax为最大事件定义时间;lb为图4中线段b的长度;v为声速。
定位算法选择常用的三角定位作为基础算法进行研究[11]。

图3 8-4-2-1型定位阵列线段b位置示意
2.2 定位传感器组合
在传统定位算法中,罐体直径较大,声波在传播过程中衰减较大,一般认为任意3个或以上传感器就能构成定位阵列,若选择的传感器信号传播受到较大干扰,定位精度则会受到影响,所以用于定位的传感器组合的选择也尤为重要。而声发射特征参数中幅值、能量、事件数和持续时间是表征腐蚀严重程度的重要参数[12],其中幅值在时间和距离尺度上都呈现显著的相关趋势[13],所以笔者以幅值作为研究对象,选择平均幅值最高的传感器组合进行定位。为了便于对比分析,将定位精度进行量化,以断铅20次为对比对象,断铅位置为中心做圆,分别统计以10,20,30 cm为半径的定位点个数,得到加入与未加入数据融合条件下的定位结果如图4所示,数据融合前后定位精度对比如图5所示。

图4 加入与未加入数据融合条件下的定位结果

图5 数据融合前后定位精度对比
由图4,5可以看出,数据融合后的定位算法在断铅位置半径30 cm的范围内,定位点个数由10个升至13个,同比增加30%。实际坐标点与计算坐标点的平均误差如表1所示。

表1 实际坐标点与计算坐标点的平均误差 cm
以上分析表明,加入数据融合后,平均定位精度提升了10.99%,有助于实现对严重度较高的声发射源的定位,同时随着范围的增大其误差也逐渐降低,因此该方法在大型储罐中的应用效果更好。虽然定位精度得到了提升,但该定位算法容易将多种信号判定为同一声发射源,形成误判,为解决这一问题,笔者将模式识别技术融入到定位算法中开展研究。
3 融入模式识别的定位算法及定位试验
3.1 定位组信号模式识别方法
该识别方法中,通过聚类分析来计算信号之间的相似性,对波形信号的共性程度进行定量评价,并对传感器接收到的信号进行分类,找出所有声发射事件。在该声发射波形互相关计算中,将不同通道的波形信号两两分组,每一组的信号互相关系数为测度,假设x=(x1,x2,x3,…,xn),y=(y1,y2,y3,…,yn)为被计算的数据组,此时简单计算互相关系数为
(2)
式中:x和y为待测量的数据;n的数值征参数个数;N为数据组长度。
为了验证聚类方法的合理性,笔者选择断铅信号和摩擦信号进行互相关计算,其相关性分析结果如图6所示。
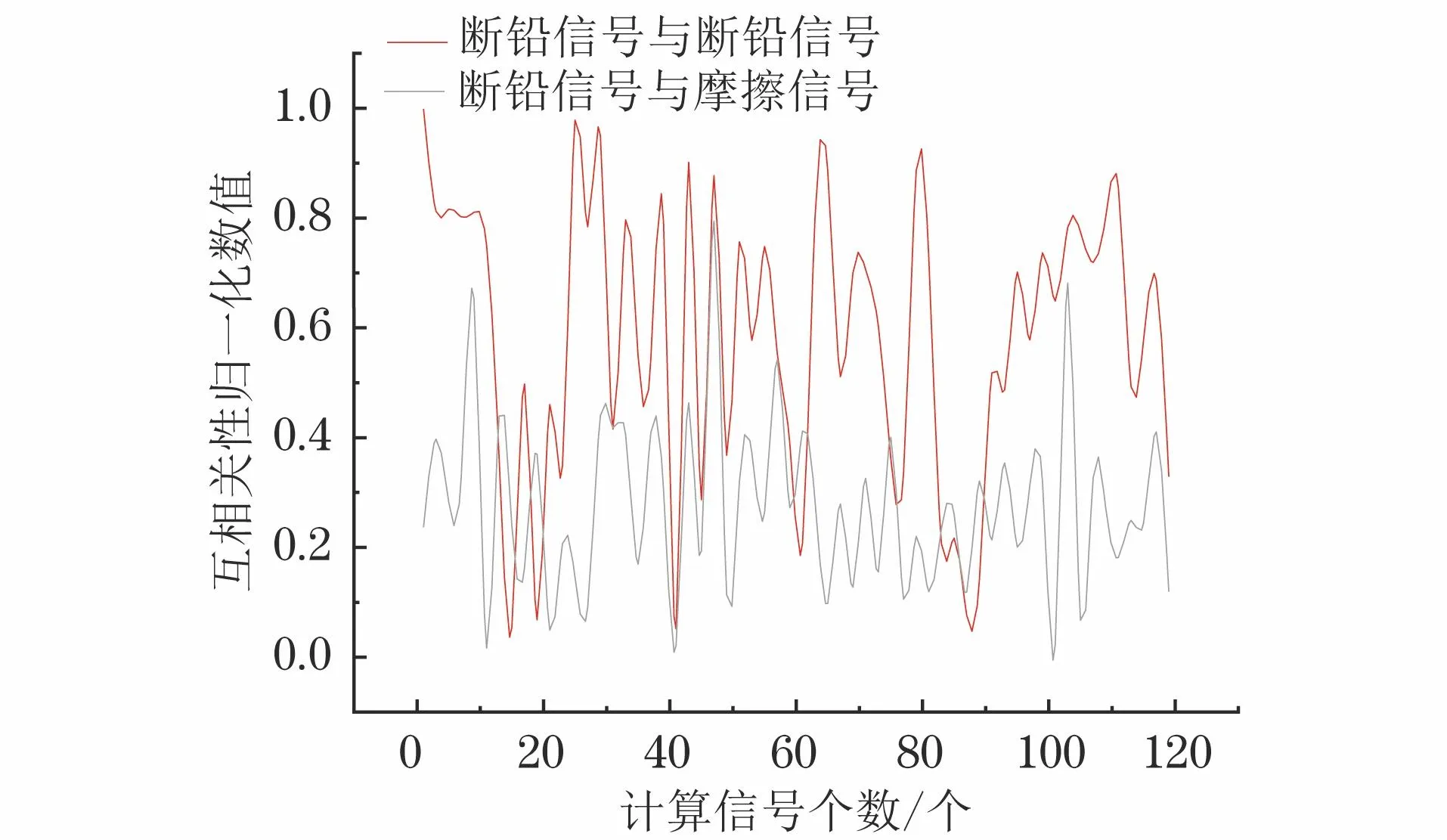
图6 断铅信号与摩擦信号的相关性分析结果
由图6可知,断铅信号间的互相关系数要明显高于断铅与摩擦信号之间的互相关系数,这说明上述聚类方法能够很好地区分出信号类别,其聚类结果汇总如表2所示。由表2可见,断铅信号的识别准确率为92%,高于摩擦信号88%的识别准确率。

表2 断铅信号与摩擦信号的聚类结果汇总
3.2 定位试验
在直径为3.6 m,高为0.6 m的室内模拟储罐上进行断铅试验。分别采用传统阵列和8-4-2-1型阵列,以罐底中心为原点,在边长为1.8 m的正方形四个顶点处进行断铅,共采集5次,10次,15次和20次断铅数据,并通过AEwin软件和新型算法进行定位计算。传统阵列和8-4-2-1型阵列定位统计结果如图7所示。
由图7(a)可以看出,相同阵列下,新型算法相较于AEwin软件的定位点个数平均降低了31.22%,很好地抑制了伪定位和重复定位问题。由图7(b)可知,新型算法下,8-4-2-1型阵列定位点数相较于传统阵列的点数平均提高了77.31%,说明8-4-2-1型阵列在一定程度上改善了漏定位问题对定位点的影响,结合前文研究推断,在应用于大型储罐时,其改善效果会更加明显。

图7 传统阵列和8-4-2-1型阵列定位统计结果
4 结语
根据传统定位方法中传感器的分布位置设计出一种新型阵列(8-4-2-1型阵列),并对新型阵列的罐底定位方法进行改进,提出了基于新型阵列和新型算法的储罐底板缺陷声发射定位方法,并进行了对比试验。试验结果表明,相较于传统方法,新方法对罐底中心位置附近损伤的定位精度提升了10.99%,重复定位与伪定位的影响降低了31.22%,应用于大型储罐时,漏定位现象也能够得到较好改善。
猜你喜欢
军事文摘(2023年4期)2023-04-05
化工管理(2022年14期)2022-12-02
煤气与热力(2022年4期)2022-05-23
建材发展导向(2021年14期)2021-08-23
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
科学与财富(2017年12期)2017-05-16
化工管理(2017年9期)2017-03-05
化工管理(2016年28期)2016-10-26