基于GBDT的气液两相流相分布测量模型
2024-03-18 08:59曾思睿孔明
化工进展 2024年2期
曾思睿,孔明
(中国计量大学计量测试工程学院,浙江 杭州 310018)
气液两相流是两相流中最常见的形式之一,涉及诸多工业领域[1-2],例如化工行业中的吸收塔、蒸馏塔、冷凝器等[3-4]。气液两相在空间中的分布有不同形式,这些不同的分布形式会改变力学特性、传热特性以及传质特性等,因此在工业领域和科学研究领域,气液两相流的相分布测量技术具有重要意义。该技术能够支持工业生产过程的流动状态监测和控制[5],并为理论模型和仿真模型提供可靠数据。凭借这项技术,人们能够实时监测和掌握工业流体的分布情况,从而实现精确控制和优化工艺。
机器学习在解决复杂非线性回归问题中表现出优异特性,为两相流流动参数测量模型的建立提供了一种新思路。国内外学者常用的机器学习主要有随机森林、BP神经网络、支持向量机(SVM)、梯度提升决策树(GBDT)以及深度学习等算法,已应用于气液两相流流型识别[6]、气泡轮廓重建[7]、流量和相含率测量[8]之中,但都未对相分布参数进行研究。
综合现有的气液两相流参数测量研究文献,对管道界面内气泡的大小和位置的研究较少。戴振韬[9]提出提取光强分布特征的方法测量相分布,采用线性回归来拟合相分布测量模型,需要指出的是,该方法使用的是单波长且仅限于水平管道。在此基础上,曹鸣等[10]提出一种基于双波长透射法对小通道竖直上升气泡流进行研究,并利用BP 神经网络建立测量模型。由于BP 神经网络具有收敛速度慢、预测能力和训练能力矛盾等问题[11],本文提出用泛化性能较好、预测精度更高的GBDT算法来训练模型,并预测实验中气泡的相分布。
1 基本原理
1.1 双波长测量原理
光学检测系统如图1所示,光源发出包含两种波长的激光光线,光线通过1mm 的狭缝变为片状光束,再通过分束镜分成两束互相垂直的片状激光,与管道垂直相交,在相交位置形成截面,称该截面为检测截面。包含两种波长的片状激光在检测截面内发生折射,管道和管道内两相流对不同波长光的折射率存在较大差异,且不同大小的气泡位于两相流中的不同位置时也会导致激光呈现出不同的折射效果,因此影响传感器上接收光强分布的因素有波长、气泡大小和气泡位置。用高速CMOS传感器实时记录气泡运动到检测截面的光强分布数据,并将这些数据传送至计算机。通过分析和处理这些光强分布数据,能够获取光强分布与气泡位置和大小的重要信息,提取这些特征,用大量仿真数据训练基于GBDT的相分布测量模型,将提取出的光强分布特征输入模型中,对实验中气泡经过检测截面时的半径和位置坐标进行预测,根据预测结果对气泡中心位置运动轨迹进行追踪。
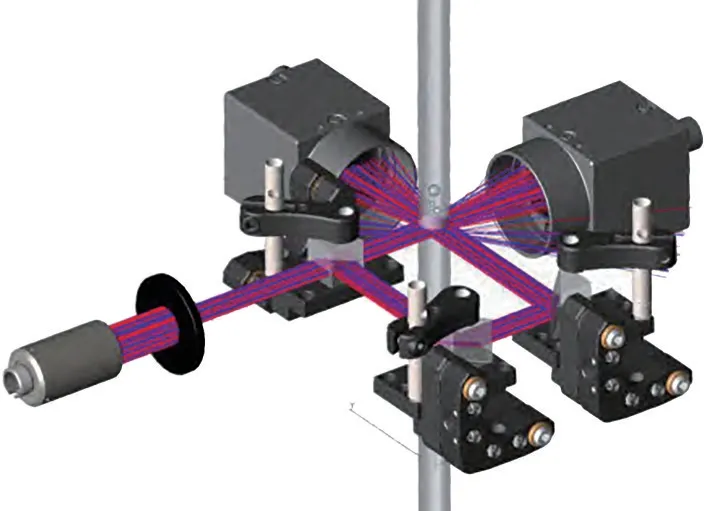
图1 光学检测系统
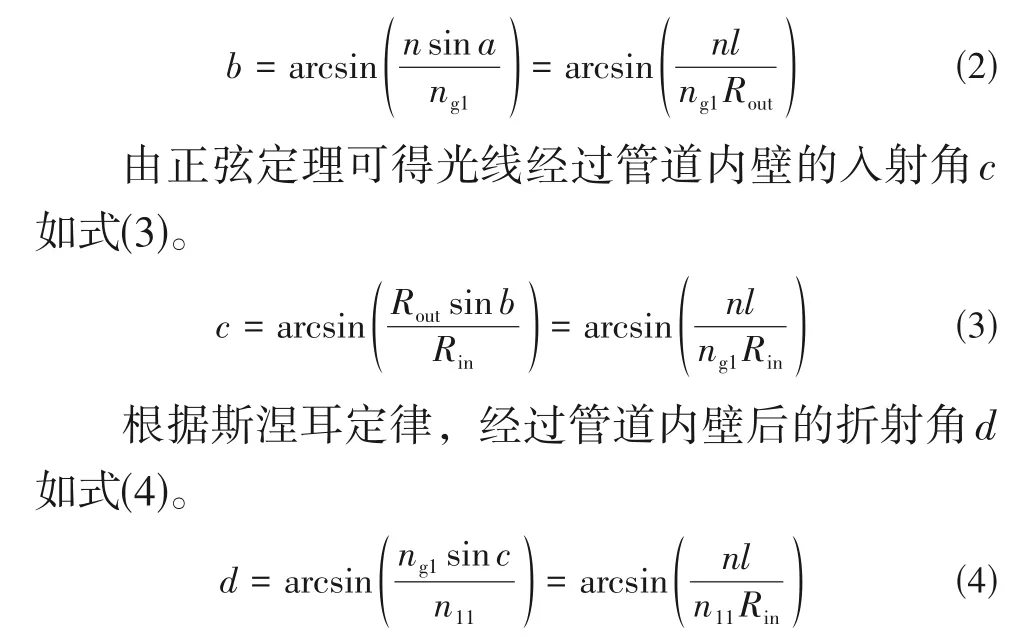
图2是光线在检测截面内的传播示意图,一束包含波长为λ1、λ2的光线入射到1mm 厚的管道,Rin为管道的内径,Rout为管道的外径,入射点到管道中心的距离为l,空气的折射率为n,波长λ1、λ2在水中的折射率为n11、n12,在石英玻璃管道中的折射率分别为ng1、ng2。以管道中心为原点建立坐标系,原点到检测平面的距离为D。由斯涅尔定律可以得出以下结论:一束包含两种波长不同的光经过管道和管道内的气液两相流后,它们的出射角度是不同的,这意味着波长λ1、λ2将分别入射到光检测平面上的不同点,设这两点之间的距离为Δδ。

图2 全液相管道光线传播路径
以波长为λ1的一束光线为例,图中a、c、e、g表示入射角,b、d、f、h表示折射角,波长为λ1的出射光线与x方向夹角为δ1。分别计算出两波长出射光线与x方向的夹角δ1、δ2,最后计算得出同一位置入射的两束不同波长的光入射到光检测平面不同两点的距离Δδ,计算过程如下。
入射角a可用入射点到管道中心距离l和管道的外径Rout表示如式(1)。
根据斯涅耳定律,光线经管道外壁折射后的折射角b如式(2)。
结合式(1)~式(4)得入射角e=d,折射角f=c;入射角g=b,折射角h=a。
波长为λ1的光线通过管道后出射光线与x方向的夹角δ1与各角度的几何关系如式(5)。

综合式(5)~式(8),可计算同一位置入射的两束不同波长的光线入射到光检测平面两点的距离Δδ如式(9)。

以上为同一位置发出的一束包含两个波长光线的计算过程,可以通过计算并记录上百万条入射光线的传播路径来获得检测平面上双波长光强分布的结果。对于某个特定波长的光线而言,光检测平面上接收的光强分布可以看作是反射和折射效应的叠加。为了描述光在空间中的光强分布,可以使用复振幅函数。当光线入射角度为θ时,相应的光检测平面的复振幅函数可以表示如式(12)。
式中,S(θ)为复振幅函数;Sreflect(θ)为反射部分的复振幅函数;Srefract,p(θ)为折射部分的复振幅函数。当p=0时,表示光线在管道内发生全发射,Srefract,0(θ)表示反射光的复振幅函数;当p≥1时,Srefract,p(θ)表示入射光线在管道内经过(p-0)次反射后出射光线的复振幅函数。
根据式(9)~式(11)可得出:由于管道和管道内液体对不同波长光的折射率存在差异,因此同一位置发出不同波长的光线出射到检测平面上的位置也不同。对上百万条光线进行追迹,通过式(12),对光线进行叠加,最终光检测平面上两个波长的光形成不同的光强分布。当有气泡经过管道的检测段时,光线在气液界面发生折射,导致大量光线被折射到光检测平面外,检测平面无法接收到这部分的光强分布,光强分布曲线出现缺失部分,气液分界面对于不同波长光线的折射能力不同,因此在相分布相同的情况下,两个波长光强分布也呈现不同特质,研究两个不同波长光强之间的关系和变化规律可获得更多相分布信息,文献[10]中对单波长方法和双波长方法进行了仿真实验,对比相应数据后可得出使用双波长方法对气泡相分布参数的预测平均绝对误差和均方误差均小于单波长方法所得。本文通过研究两个不同波长光强分布的关系和变化规律,以获取光强分布与相分布的相关信息。结合上述公式,波长间隔越大折射率相差越大,到达光检测平面的间距也越大,再结合对市场现有激光器的调研,选定波长分别为445nm和635nm的双波长激光光源。
1.2 梯度提升决策树原理
梯度提升决策树(gradient boosting decision tree,GBDT)属于机器学习中的监督学习算法,是一种迭代决策树算法,是一个高性能的非线性回归预测算法[12],也可用于实现分类任务。其主要理念在于通过持续的迭代过程逐渐降低残差,并通过梯度优化来构建多个回归决策树。最终,将所有回归树的结论总结起来形成最终模型,其目的在于同时降低模型的方差和偏差。除了具备树模型较强的解释性和对混合模型有效的处理能力,其另外的优势在于强大的预测性能和出色的稳定性。
GBDT 算法的本质是一种以决策树作为基函数的提升方法,具体如式(13)。
式中,决策树用T(x;Φm)表示,其中Φm为决策树的参数,M为决策树的个数。模型算法采用向前分布算法。
首先确定初始提升树F0(x)=0。
其次,利用向前分布算法,得到第m步的模型如式(14)。
式中,Fm-1(x)为当前模型。
之后,采用经验风险最小化方法确定下一棵决策树的参数Φm如式(15)。

2 基于GBDT的相分布测量模型
2.1 双波长特征提取
为了讨论光强分布随气泡半径和位置变化的规律,使用Trace Pro 光学仿真软件建立检测系统模型,进行气泡流相分布测量仿真实验。光源发出的光线经过管道与不同相分布下两相流折射,通过Trace Pro软件自带的光线追迹功能,得到了光检测平面上的光强分布曲线。为了更好地模拟气液两相流的情况,引入均质模型,并假设气泡在任何位置的尺寸保持不变。将小通道截面内的气相分布情况近似描述为中心位置和尺寸可变的圆形,中心位置坐标为x和y,气泡半径为r,记相分布参数为(x,y,r)。图3为小通道气液两相流模型部分光线的追迹。
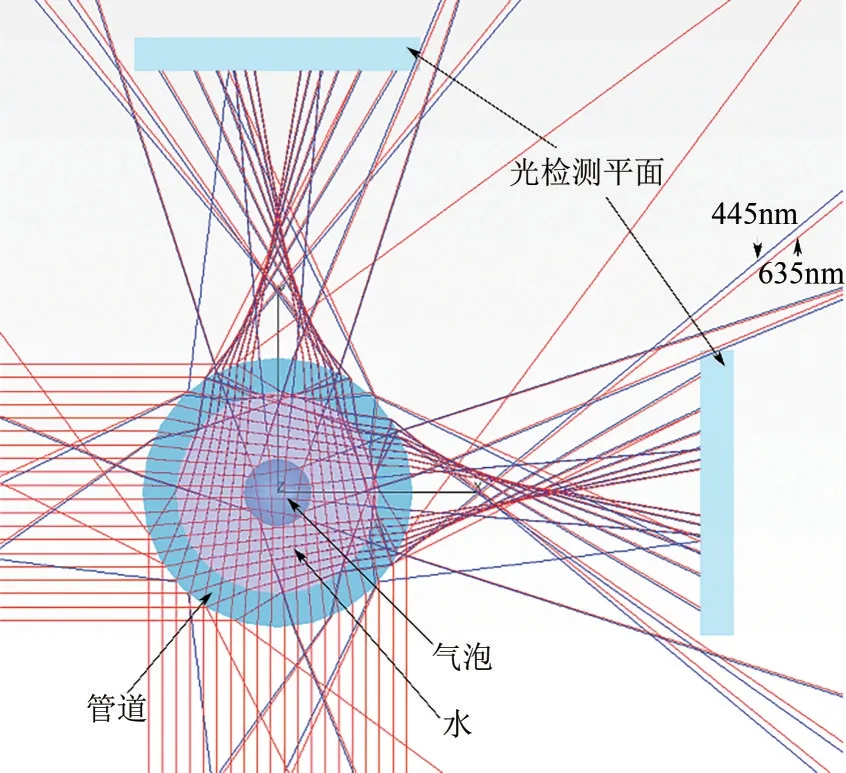
图3 小通道气液两相流模型光线追迹
图4为气泡不同相分布参数情况下光强分布对比,对比图4(a)~(d)可以发现,在管道中有气泡时,光强分布曲线出现缺失部分。由图4(b)可看出,两波长光强分布曲线的缺失部分两侧双波长的间隔存在差异。对比图4(b)、(c)可以发现当气泡半径相同,中心位置不同时,缺失部分位置不同。对比图4(c)、(d)可以发现当气泡中心位置相同,气泡半径不同时,缺失部分长度不同。综上可以得出结论:气泡的中心位置和气泡半径会影响双波长光强分布曲线的缺失部分长度、缺失部分偏移量和双波长间隔宽度,因此可以选择以上三类特征参数作为特征值,对气泡相分布参数进行预测。
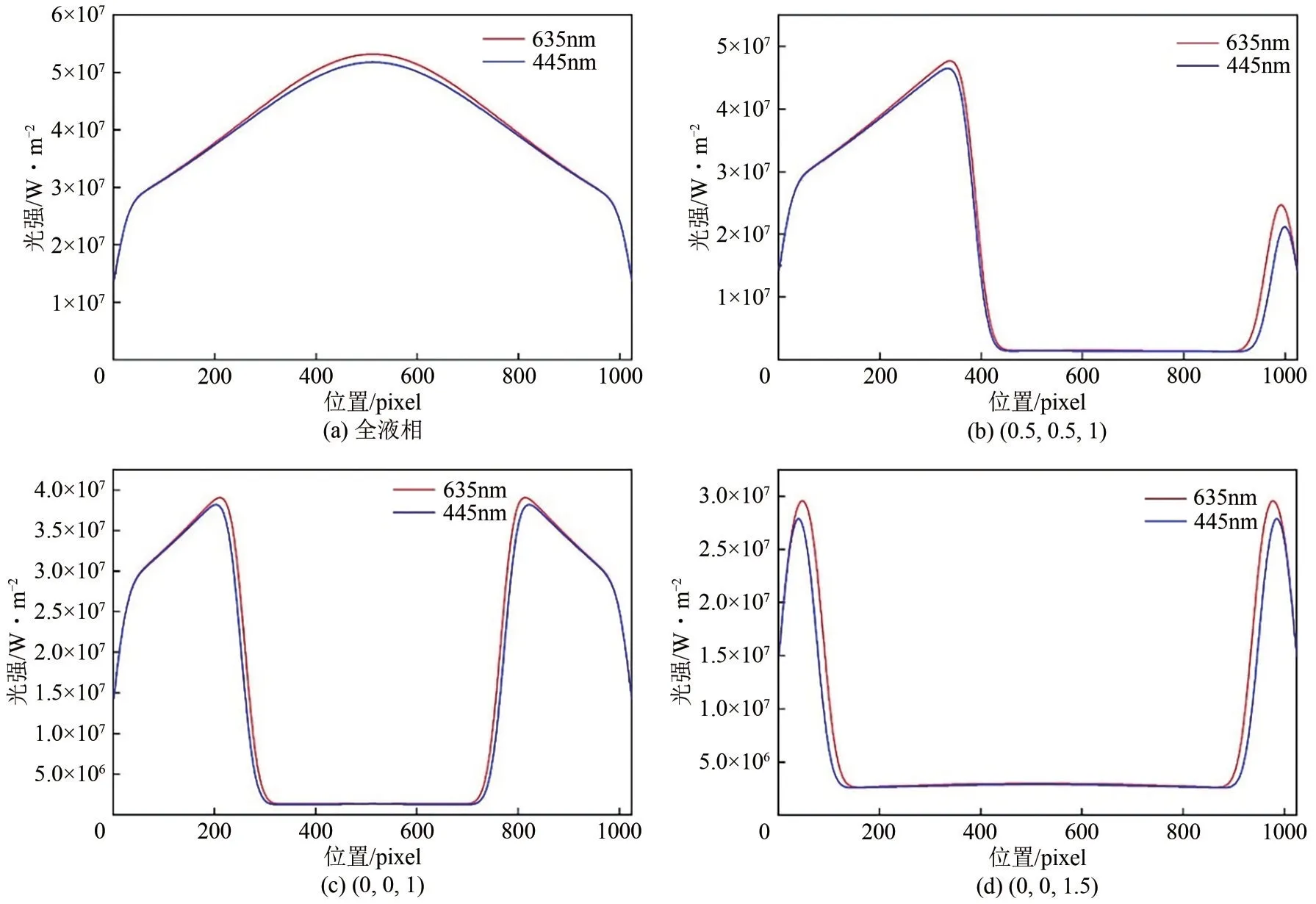
图4 气泡不同相分布参数情况下光强分布对比
借助Trace Pro 软件计算两个不同波长光线在不同相分布下,管道截面内光线的传播路径,得到光检测平面上不同波长光强分布曲线,用Matlab软件与Trace Pro 建立通信,实现批量仿真,仿真时设置的相分布参数取值见表1,得到了22778 组光强分布与相分布参数对应的数据集。对双波长光强分布数据集进行归一化处理,以全液相时的光强值为最大值,以全气相时的光强值为最小值,进行最大最小归一化,图5 以0.9 为阈值处双波长,间隔长度计算方式,横坐标为像素位置,长度为1024。分别计算出445nm和635nm在固定阈值处归一化光强分布曲线的缺失部分长度ΔL1,445nm、ΔL1,635nm,缺失部分偏移量ΔL2,445nm、ΔL2,445nm,计算得双波长间隔宽度ΔL3,left、ΔL3,right,最终建立了共22778 组不同相分布与三类双波长特征值相对应的特征值数据集。
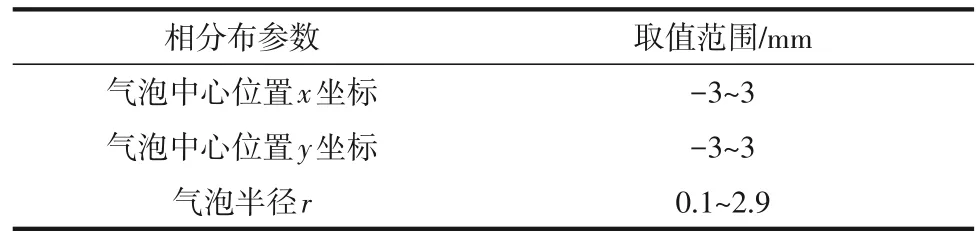
表1 仿真时相分布参数取值范围
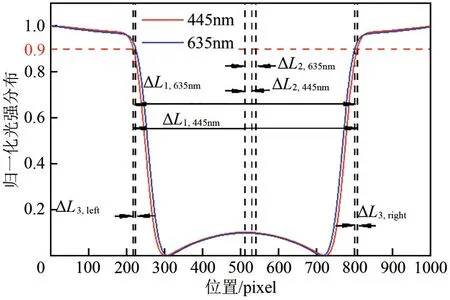
图5 双波长特征提取
2.2 测量模型的建立

本文借助GBDT来研究相分布每个参数和双波长特征值的关系,选择适当的决策树模型是影响GBDT模型泛化能力的关键因素之一。为此采用了GirdSearchCV 的方法调整GBDT 的超参数,通过在几个主要超参数的取值范围内搜索最佳参数组合,研究了多种参数组合,使用建立的相分布特征值数据集进行测试,将所有验证结果取平均即为该组参数组合的得分。建立模型的首要工作是确定模型的决策树数目,用网格搜索和交叉验证相结合的方法对其他超参数进行调优,本文的GBDT超参数调优设计见表2。
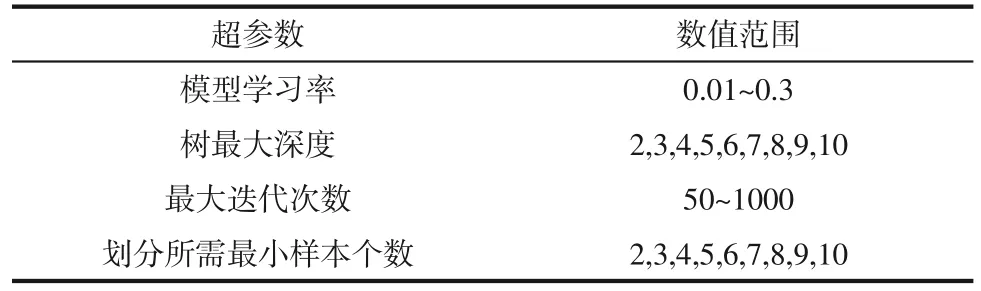
表2 超参数及其选择范围
GirdSearch 的交叉验证次数设定为5,超参数的选择基于验证数据集的拟合度最大化。当某一组超参数的5 次验证数据的平均值最大时,认为这组超参数是最优的。在GBDT 模型中,整个模型的拟合能力一定程度上由决策树的数量决定,该数量还影响着模型的复杂度。在选择了超参数的基础上,对拥有不同决策树数量的模型进行了性能分析。最终,通过对比不同参数下的模型表现,设置了以下超参数:学习率为0.2,树的最大深度为2,划分所需最小样本个数为2,最大迭代次数为3000。
2.3 仿真数据分析
随机选取上述方法得到的22778组双波长特征值数据集的90%作为训练集对GBDT 模型进行训练,利用训练好的模型对剩余10%的测试集进行相分布预测。以横坐标为相分布参数的真实值,纵坐标为预测值,虚线为±5%的误差限,绘制误差带图,当点在两虚线范围内时,说明预测结果较好,使用GBDT算法对测试集相分布的预测结果如图6所示,预测值大部分都在±5%极限误差内。为了验证测量模型的优越性,与已有文献中使用的BP 神经网络进行对比,用相分布参数的均方误差(mean square error,MSE)作为预测模型的评价指标。两种预测模型的均方误差对比见表3。通过对比可以发现,使用GBDT对气泡相分布预测时,相较于BP 神经网络均方误差减小了33.33%,验证GBDT算法可实现更高精度测量。

表3 BP神经网络与GBDT预测均方误差对比
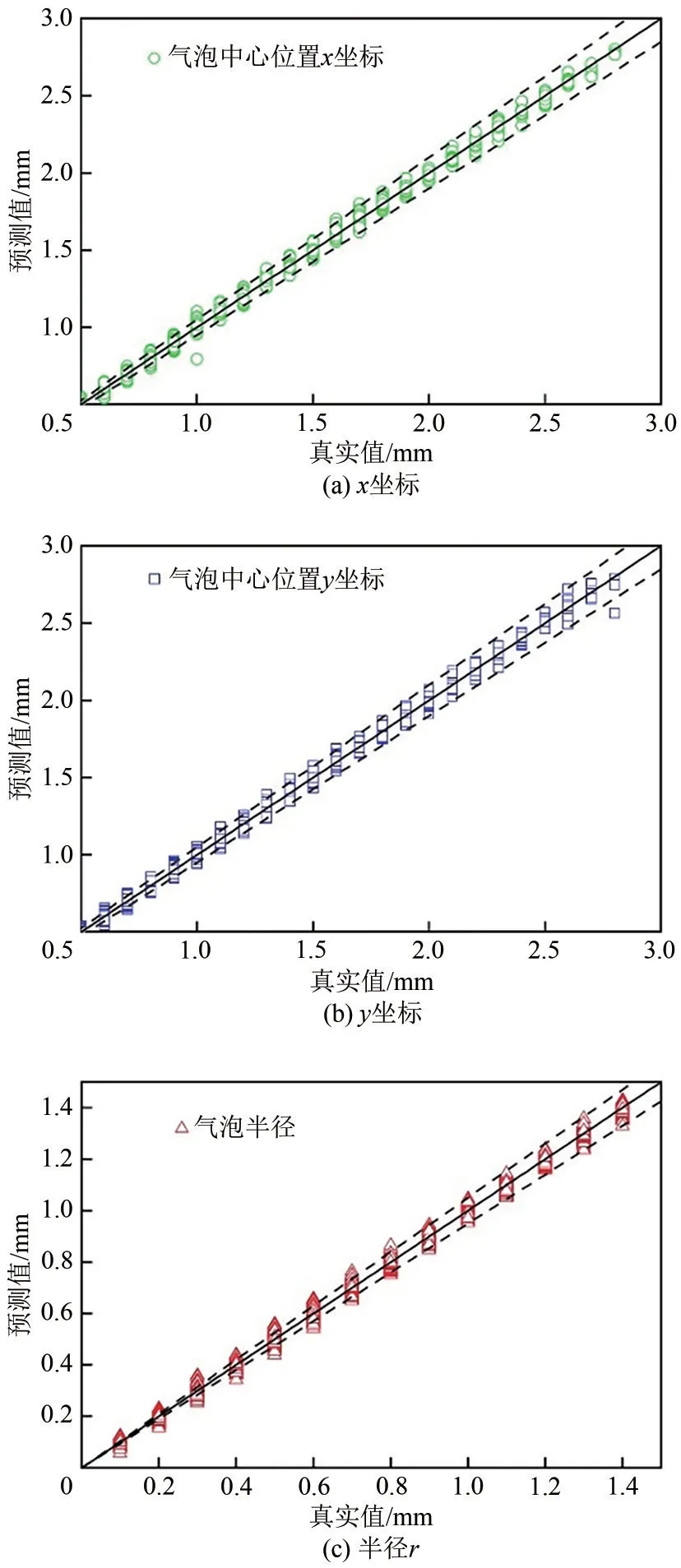
图6 GBDT预测结果
3 实验与结果
实验装置如图7所示,实验选用凌云光型号为BFS-U3-51S5C-C 高速CMOS 传感器,像元大小为3.45μm×3.45μm,采集分辨率为2448×2048,最大帧频可达200帧/秒,用SPINVIEW调整相机参数并采集光强分布数据。光源有635nm、520nm 和445nm 三个波长通道,实验中使用的是波长为445nm 和635nm 的两通道。采用Zolix 的精密电动直线滑台PA050,搭配SC300-2B 型号的位移控制器,通过控制电动位移台推动注射器的速度来控制进入管道的气相流量。气相浮子流量计型号分别为LZB-3WB,相应量程范围为10~100mL/min。
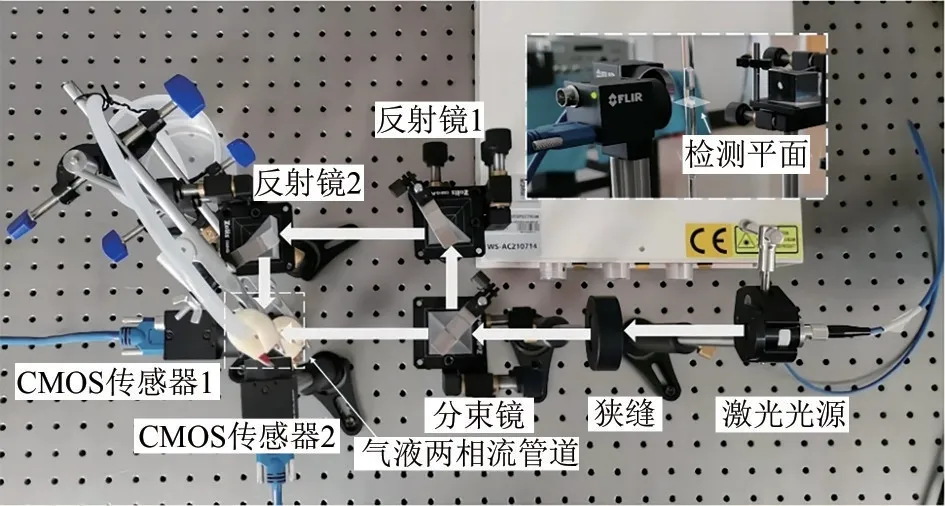
图7 双波长检测实验装置
用最小二乘法分别提取出635nm和445nm两单波长光强分布图,单波长光强分布提取效果如图8所示。分别提取出两单波长的光强分布曲线后用上文提到的最大最小归一化对三类特征值进行特征值提取,由于实验中CMOS采集的信号具有噪声,需要对归一化后的图像进行平滑处理后再计算出曲线的缺失部分长度、缺失部分偏移量和双波长间隔宽度。计算出三类特征值将其输入到由仿真数据训练好的模型中,对实验数据的相分布进行预测。
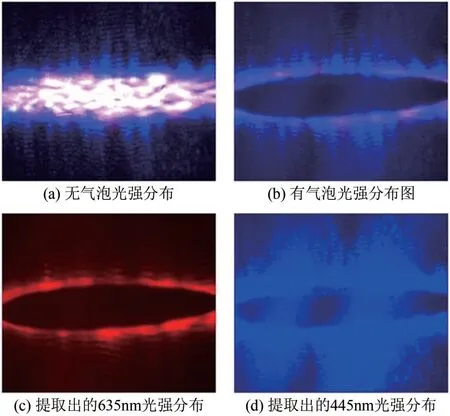
图8 单波长提取效果
设置电动位移台的驱动速度为2mm/s,此时气相浮子流量计测量的气相速度为30~40mL/min。相机以200帧/秒的速度记录一段时间内气泡的运动状态,从实验采集的双波长光强分布中提取出三类特征值,计算出三类特征值后输入到由22778 组仿真数据训练好的GBDT 模型中,得到相分布的预测值,图9为根据相分布预测值建立的连续50帧气泡中心位置运动轨迹,其中图9(a)为检测平面X,图9(b)为检测平面Y,横轴为相对位置,单位为mm,纵轴为帧序数,实现了对气泡中心位置运动轨迹的追踪。
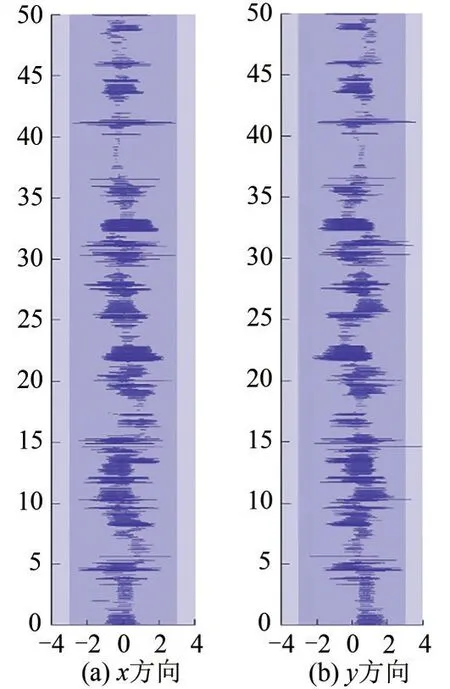
图9 气泡中心位置运动轨迹
4 结论
针对已有文献中提出的双波长透射法测量气液两相流相分布参数的技术,提出了用GBDT算法建立测量模型,用仿真实验得到的光强分布与相分布对应的数据集,提取三类光强分布特征值作为输入,对模型进行训练后,用训练好的模型对实验中气泡流的相分布进行预测,具体结论如下。
(1)用Trace Pro 建立仿真模型,研究双波长光强分布曲线的三类特征值与相分布参数的关系,用GBDT建立测量模型,用仿真数据集对模型进行训练,随机抽取数据集的10%模拟实验测量研究对相分布参数进行预测,预测值大部分都在±5%极限误差内。
(2)搭建了实验平台,通过向液柱中注入空气的方法得到气泡流,用训练好的模型对实验采集的气泡流进行相分布预测,实现了对气泡中心位置运动轨迹的追踪。
(3)本文使用的GBDT算法对气泡相分布预测的定位精度优于已有文献,但对于气泡粒径的预测精度还有待提高,未来发展可以对粒径大小预测算法进行优化,提高粒径预测精度。此外该方法可以对工业生产过程中两相流流动状态进行在线监测。该技术的测量原理是不同介质对不同波长光的折射率不同,出射点也不同,因此还可以将该技术用于颗粒流和折射率不同的液液两相流等。
猜你喜欢
欣漾(2024年2期)2024-04-27
新潮电子(2021年7期)2021-08-14
建材发展导向(2021年13期)2021-07-28
北京航空航天大学学报(2021年6期)2021-07-20
中国特种设备安全(2019年9期)2019-12-03
成都信息工程大学学报(2019年3期)2019-09-25
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
电子制作(2018年16期)2018-09-26
西南石油大学学报(自然科学版)(2016年6期)2017-01-15
中央民族大学学报(自然科学版)(2016年4期)2016-06-27