三元锂电池热失控射流可视化及速度场测试
2024-03-18 08:58刘昊东张鹏飞黄钰期
化工进展 2024年2期
刘昊东,张鹏飞,黄钰期
(浙江大学能源工程学院,浙江 杭州 310027)
随着电动汽车的日益普及,电动汽车电池的安全评价关乎到车辆的安全性和用户的使用体验[1]。电池热失控研究在提高电动汽车安全性、优化电池设计和材料选择、改进电池管理系统、推进电动汽车技术发展、增强消费者信心以及支持政策制定等方面具有重要意义。尤其是对于广泛应用的三元锂电池而言,其在电池材料选择和组件设计、热失控机理、热失控防范措施以及温度控制和热管理等领域不断涌现新的研究和成果[2]。
当三元锂离子电池处在高温环境下,电池内部的电解液和电极材料可能发生热分解反应,热分解反应导致电解液中的有机溶剂、电解质和添加剂等成分分解成气体;此外,电池正极和负极的电极材料可能与电解液中的氧气发生氧化反应,产生气体。这些气体聚集成气泡,可能堵塞通道或导致局部区域压力逐渐增加。当内部压力达到临界点时,电池正负极表面的气泡会以高速射流的形式从气孔或通道中释放。在电池热失控的过程中,存在两次典型的射流现象:首先,第一次射流出现在安全阀打开瞬间,内部积聚的可燃气体、电解质蒸气以及液滴会以高速射流的方式流出;其次,第二次射流在热失控开始后发生,随着电池温度迅速升高,内部副反应加速进行,产生大量可燃气体和固体颗粒,从而引发第二次射流现象。射流现象可能导致电池壳体破裂,电解液泄漏,进而导致电池系统的火灾、爆炸等严重安全事故。研究三元锂离子电池热失控的射流速度场在以下几个方面具有重要意义。
(1)电池内部压力研究。通过研究射流速度场,可以了解电池内部压力随温度的变化情况,有助于预测电池的安全性和稳定性。此外,通过对射流速度场的研究,可以确定导致射流现象发生的临界压力值,帮助研究者理解电池热失控的发展过程。
(2)仿真分析校验。通过与实验数据进行比较,对后续仿真模型的校验提供参考,有助于验证模型的准确性和可靠性,从而改进仿真模型,使其更符合实际情况。
(3)结构设计优化。通过研究射流速度场,可以深入了解电池内部气体释放和流动的行为。这有助于优化电池的结构设计,包括电池壳体、隔膜和气孔等,以确保在热失控发生时,电池内部气体能够顺利释放,减少堵塞现象,并降低射流的发生概率。
(4)电池热管理策略制定。射流现象是电池内部能量失控的一种释放方式,研究射流的速度场可以帮助制定更有效的热管理策略。通过及时监测电池内部温度和压力变化,以及对电池充放电过程进行动态控制,可以预防和控制射流的发生,降低热失控的风险。
(5)抑制火焰传播。对射流方向的精确研究,可以帮助合理选择灭火剂的喷射方向;研究射流速度场有助于了解氧气在火焰传播过程中的运动和分布。通过合理设计电池结构或安装隔离屏障,可以有效阻断氧气的供应,减缓火焰的蔓延。
García 等[3]对LCO、NMC、LFP 三种电池的热失控过程分别进行了可视化拍摄,并分析了射流的流动形态与安全阀结构之间的关系。Mao 等[4]利用COMSOL Multiphysics中的常微分方程组建立了瞬态活性模型来描述三元锂电池热失控中的气体流动和射流火焰。采用阿伦尼乌斯方程描述气体生成动力学,并对流速进行模拟。Li等[5]采用三维CFD模型研究了18650型三元锂离子电池在排气过程中的流场,使用尺度求解模拟方法对得到的平均速度和脉动速度分布进行了研究,并对通风口产生的湍流现象进行了可视化。Zhou等[6]提出了一种根据质量损失估算安全阀处射流速度的方法,发现最大射流速度总是出现在安全阀开启的瞬间,其值为42.05m/s;此外,对安全阀开启前的产气速率进行了定量分析,发现产气速率随电池表面温度升高而增大。这些学者的研究工作多集中对产气流速的模拟仿真工作上,而对实验时全局速度场的分析研究较少。基于此,本文采用粒子图像测速技术对电池热失控喷阀射流的速度场展开研究分析。在粒子图像测速技术中,常用的测速算法主要可分为光流法和互相关法。光流算法适用于运动跟踪、动作识别、物体检测等任务,具有实时性[7]、非侵入性和适用性广泛等优点。然而由于其具有光流不唯一性,可能导致在光照变化或纹理缺失的情况下产生不准确的结果[8],并且在连续图像序列中进行计算时,可能会因为误差累积而导致跟踪的不稳定性。
由于粒子图像测速技术对视频图像的质量要求较高,而电池喷阀射流中,烟气浓度高,不同相间可能存在明显的速度差,导致图像质量受限。在视频成像过程中可能存在以下一些问题。
(1)运动速度快导致图像模糊。电池热失控时,射流速度较高,导致图像出现运动模糊,从而使视频图像质量降低。
(2)液滴分布稀疏。液滴的分布可能较为稀疏,这会导致图像中能检测到的颗粒数量有限,从而影响粒子的跟踪和测速精度,且烟气的产生也在一定程度上影响辨识清晰度。
(3)不均匀性和涡旋。由于流场中存在各种不均匀性和涡旋,图像中的颗粒灰度值可能出现较大变化,这会对特征提取和跟踪算法带来困难。
(4)存在噪声。实际拍摄过程中,可能存在各种噪声,如光照噪声、传感器噪声等,这些噪声会进一步降低图像的质量。
为解决以上问题,并考虑到在高温条件下设计安装示踪粒子发射器的困难,本文引入了一系列图像降噪、增强的方法,弥补了电池喷阀射流过于复杂导致PIV 图像处理质量低的问题,从而提高了后续流场的计算分析的可靠性;在流场速度场的识别计算方面,本文采用了结合双高斯亚像素精度插值的互相关算法对喷射流场进行速度场分析,为后续电池热失控下喷阀射流流场的研究工作提供参考。
1 实验系统和方法
1.1 实验系统与工况
该实验装置主要包括激光发射系统、电池防爆箱、高速相机、电池热失控装置、测温模块和计算机,实验系统示意图和台架实物图分别如图1、图2 所示。电池选用18650 圆柱形锂离子电池,实验前样品电池经过10 次标准充放电循环后,充电至100% SOC用于实验。电池被固定在电池热失控装置内,电池的一半侧面用铜块加热,另一半在中间位置设有热电偶测温点,用于测量电池温度。铜块侧面有6 个测温孔以便于用热电偶进行温度测量。测温模块为NI 板卡,其采集所有温度信息并同步至计算机。该装置放在电池防爆箱内进行实验,箱体正面具有较大视角的观测窗口,便于高速相机成像,左侧部也设计有窗口,便于激光进入。
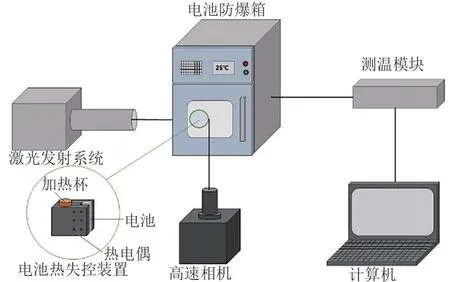
图1 实验系统示意图

图2 台架实物图
激光发射系统工作原理如图3所示。当激光器电源处于外控状态时(接受外部频率信号),外部光闸打开,激光经竖直方向45°反射镜反射到导光臂内,从导光臂出口输出激光[9]。在进行激光器的检查准备工作后,开启制冷机,连接同步器并设定频率为3kHz TTL信号,跨帧时间为8μs,脉冲频宽50μs,电流设定值为12A,随后打开光闸,输出波长为527nm、功率为4.9W 的激光。调整导光臂保证激光与电池安全阀的出口为垂直状态。打开高速相机保持拍摄状态,相机型号为FORTIC226,具有1024×736的分辨率,跨帧时间为8μs。打开电源对铜块进行加热,温度模块实时采集并记录温度数据,高速相机拍摄电池喷阀射流流场。如图4 所示,通过对比图4 中实验前拍摄到的空白帧和CT扫描得到的样品电池内部结构图计算得到实验拍摄比例尺为1∶0.02098(空白帧中187.54像素长度对应实际长度3.93475mm)。
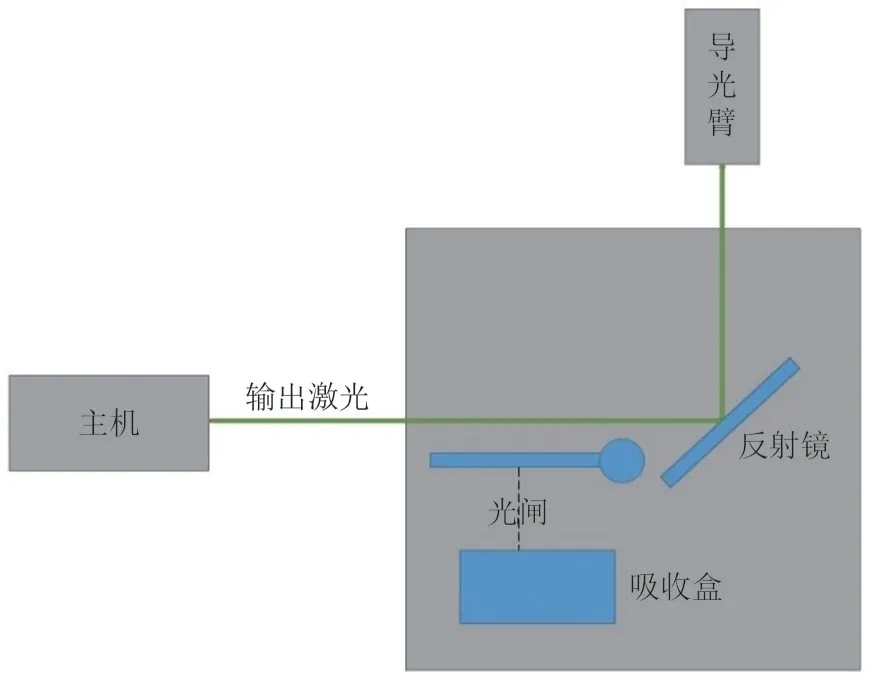
图3 激光系统工作原理图

图4 比例尺确定
1.2 实验方法及原理
由于场地设备和环境因素的限制,本实验无法实现示踪粒子发射器的设计安装。因此需要对视频图像进行更为严格的预处理,以能更清晰地观察到喷阀射流流场,便于后续进行速度场的辨识分析工作。
综合考虑高速相机相关电子元器件参数及实验环境,该实验视频成像可能存在以下质量问题:在高速拍摄过程中,由于相机传感器产生热量,可能引发热噪声,导致图像中出现随机的点状或斑点状的亮暗变化[10];在高速拍摄中,由于快门速度和光照条件的影响,可能会出现图像的亮度不均匀以及运动模糊,尤其对于高速运动的流体,可能会出现大面积无法识别的液团,使图像细节模糊不清;图像中可能存在高频噪声,表现为图像中细节或边缘部分的颗粒状噪声。这些问题可能对实验结果产生一定影响。
综合考虑,本实验采用自适应滤波方法对视频图像进行预处理,流程图如图5所示。首先采用巴特沃斯高通滤波方法(BLPF)对视频图像进行处理,以突出视频图像液滴的边缘细节特征,使其在后续处理中更容易检测和计算。HPF能够增强图像中的高频细节,抑制低频成分,并一定程度上能减少图像的背景和噪声。然后,相较于固定模板的普通高斯滤波,所采用的自适应高斯滤波方法(AGF)能根据图像的局部特征来调整滤波核的大小和权重,从而更好地适应图像的变化[11]。在图像平滑的区域,AGF 能够更好地降低噪声,在细节和边缘特征上的保留效果也更加显著。这样的处理方式有助于保持图像的细节信息并减少处理过程中可能引入的不必要的模糊。最后采用直方图均衡化(HE)来重新分配射流实验视频图像像素的灰度级,使得图像的像素值在整个灰度范围内更均匀分布[12],从而提高图像的对比度,并增强细节的显示效果。
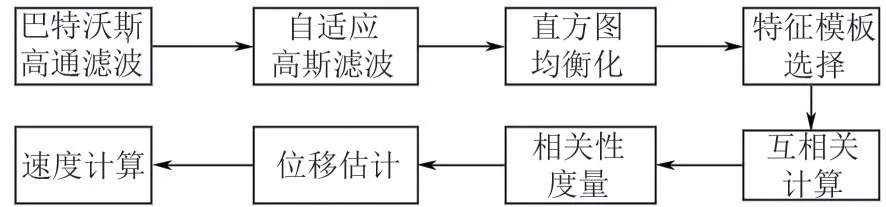
图5 实验方法流程图
本实验采用基于双高斯亚像素精度插值的互相关计算方法,其本质是测量两个图像之间相似性[13]的计算方法。在每帧图像中,选择一个特征模板,该模板通常是一个小的局部图像区域[14],用于表示颗粒或物体的特征,接着在另一帧图像中搜索与特征模板最相似的位置。通过将特征模板和搜索图像进行卷积计算,并计算卷积结果的相关性来衡量两个图像的相似程度。通过分析相关性图像,找到最大相关性值所在的位置,该位置对应于特征模板在搜索图像中的最佳匹配位置。然后计算特征模板中心位置和最佳匹配位置之间的位移向量,该位移向量表示颗粒在相邻图像帧之间的位移量。最后,根据位移向量和已知的时间间隔,可以计算出颗粒的运动速度。
在互相关计算得到的仅是位移向量(Δx, Δy)粗略的估计值,结合亚像素精度插值来提高测速的精确性和稳定性[15]。其中采用高斯函数对互相关函数进行拟合,以准确找到互相关函数的峰值位置,从而获得更准确的颗粒位移信息。然而由于颗粒图像可能存在不均匀的光照、遮挡或颗粒分布不均等问题,单个高斯函数拟合可能无法完全准确地找到峰值。本实验采用的双高斯拟合方法能够更好地处理这些复杂情况,从而提高测速结果的可靠性。然后采用窗函数来消除边界效应并进一步减小噪声影响,使得靠近边界的像素对互相关计算的贡献较小。其次对多帧图像进行平均化,以减少随机误差。最后进行剔除异常值的后处理工作,以进一步提高测速结果的可靠性和精确性。
2 结果和分析
2.1 视频流场初分析
图6中黑色曲线为电池温度变化曲线,当电池温度被加热至150℃时,锂电池内部达到临界压力,安全阀开启(T=t0时刻标定为安全阀打开的时刻),释放内部积聚的可燃气体、电解质蒸气以及液滴。高速相机拍摄记录的喷阀射流持续时间约为12000μs。如图7 所示,提取喷阀射流6 帧原始图像并对其流场进行初步分析。本实验研究重点在于对喷阀射流速度场的计算分析,故对实验后期阶段速度场仅作简要分析和概括。
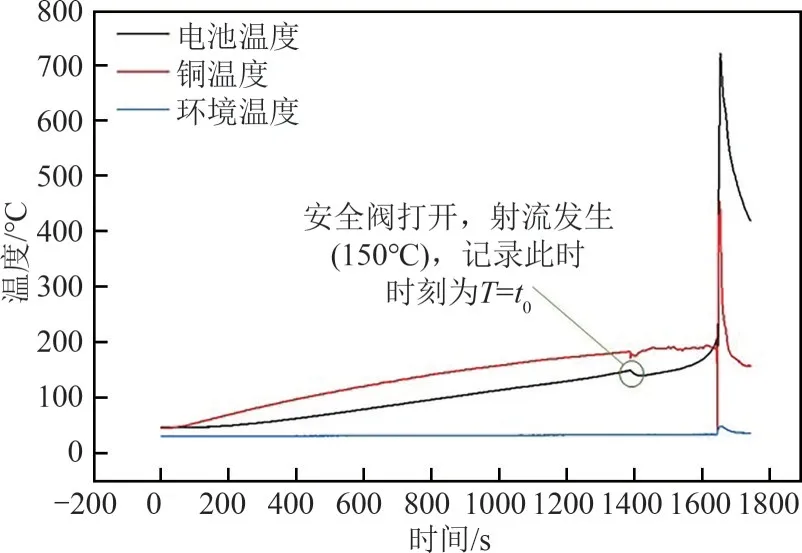
图6 电池温度变化曲线图

图7 不同时刻的流场图
(1)从T=t0+8μs时刻开始,高速相机捕捉到电池正极喷射出稀疏的小液滴。
(2)在T=t0+(8~72μs)该段时间内,液滴大量喷出。射流行为受电池内部的温度和压力变化影响,在实验前期液滴会发生聚并现象从而形成尺寸较大的液团和液丝,该现象与电解液的物性参数如表面张力、黏度等有关,还受到射流速度和安全阀结构的影响。
(3)在T=t0+304μs时,由于液滴受到空气阻力和浮力等力作用,相较于之前,液滴运动轨迹发生细小变化。液滴与周围空气之间存在气液界面,由于气液界面上的蒸气压力和外界压力的差异,以及液滴温度和环境温度之间的差异,蒸气会从液滴表面逸出,导致液滴逐渐蒸发和气化。此时的射流呈明显气液两相状态,喷雾左侧气液边界线与水平线夹角大约为45°。
(4)在T=t0+(304~792μs)期间,由于表面液体分子发生气化,表面张力差异增大,液滴更加不稳定。此外,惯性会导致液滴发生形变和振动,液滴不断破碎,形成更小的液滴。
(5)在T=t0+2864μs 时可以明显观察到,在相变和气化过程中,电解液的部分成分在气液界面形成胶状物质,另一部分形成了一些高聚结构。同时,部分胶状物质在外部环境的冷却作用下迅速结为团块状物质。
(6)从T=t0+22912μs开始,在后续的时间段内高速相机只能拍摄到稀疏的小液滴,且有部分胶状物质残留。
2.2 图像预处理结果分析
为了避免在直方图均衡化过程中增强噪声的影响,在本实验中采用的视频图像预处理的顺序安排为:首先,用高通滤波方法对图像进行锐化处理,以增强图像的边缘和细节。接下来采用自适应高斯滤波方法对图像进行去噪,以有效地减少图像中的噪声干扰。最后,对预处理后的图像进行直方图均衡化,以提升图像的对比度和视觉质量。
在图像增强方面,本实验选择在频域内采用二阶巴特沃斯高通滤波方法对视频图像进行增强。如图8 所示,相比于理想高通滤波,二阶BHPF 有平滑的过渡区域,不会引起明显的振铃效果,从而在空域上产生更自然的结果。此外,其滤波特性可通过调整滤波器的阶数和截止频率来控制,二阶BHPF能够对本实验的视频图像进行较好的增强。

图8 图像增强结果对比图
图9为采用不同图像降噪方法处理的结果。在评估图像去噪效果时,峰值信噪比(PSNR)是一项重要指标,用来衡量原始信号和处理后信号之间的相对误差,其计算为式(1)。
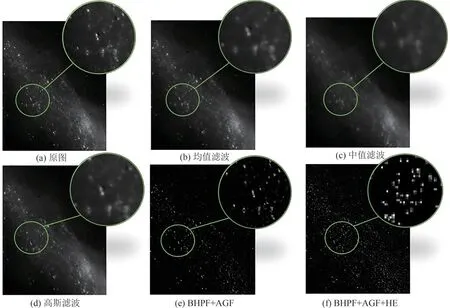
图9 图像去噪结果比较
式中,MAX 是表示图像中像素值的最大可能值,对于8位灰度图像,MAX为255。对于多通道的彩色图像,MAX通常为255,因为它考虑了RGB三个通道的最大像素值。
MSE 是均方误差,用来衡量两幅图像之间的差异。MSE的计算公式为式(2)。
式中,I(i,j)表示原始图像中位置(i,j)的像素值;K(i,j)表示处理后图像中位置(i,j)的像素值;m和n分别表示图像的高度和宽度;mn为像素总数。
通过计算可得采用不同降噪方法后各图像与原图像的PSNR值,结果如表1所示。
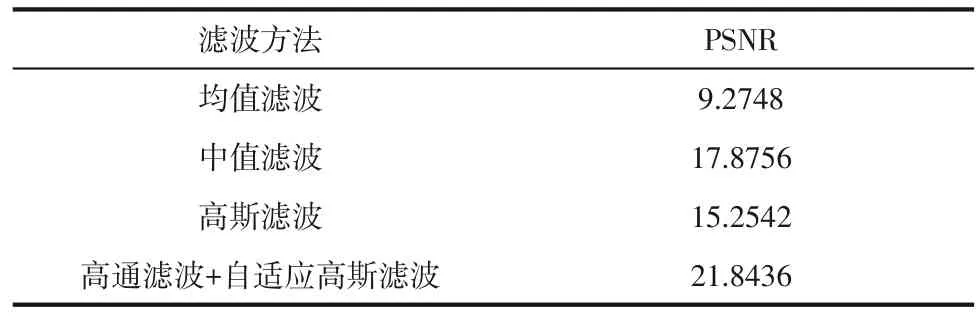
表1 不同滤波方法处理后的PSNR值
在本实验中,通过对比PSNR值和对比图9(b)、(c)、(d)、(e)的处理结果,对采用不同降噪方法对视频图像进行处理进行了评估:PSNR 值越大表示图像质量越好,结果显示本实验采用自适应滤波方法能够对该视频很好地进行降噪锐化处理。均值滤波对于本实验中非均匀噪声的处理效果较差,仅适用于一些简单的噪声抑制工作。对于本实验的视频图像,虽然中值滤波得到的PSNR值较高,但其对于较小范围的噪声存在过度平滑,导致图像细节丢失严重。与仅采用高斯滤波方法相比,图9(d)中仍能观察到较大尺寸的液团,且部分区域仍受到一定程度的噪声干扰,严重影响后续速度场的分析。而经过自适应滤波方法处理后的视频图像,能够更加清晰地辨别出射流液滴,即在去噪的同时保持粒子的边缘信息,避免产生模糊效果。该方法对高斯核大小进行调整,可自动控制滤波的平滑程度,在图像中一些稠密且液滴尺寸较小的区域,该方法自动减小高斯核的大小,保留更多的细节信息。
此外,对比图9(e)、(f),直方图均衡化能有效增强图像的对比度,对于降噪锐化后的图像,该方法处理后使得更小的液滴的边缘细节更加明显,从而提高了后续互相关算法的准确性和可靠性。对比度增强后,图像中液滴和背景之间的灰度差异更加显著,有利于算法更准确地识别液滴位置。最后,直方图均衡化还将背景像素的灰度值拉伸到适当范围,使得背景区域更加均匀,进一步减少了噪声对检测和测速的影响,同时也显著改善了图像的视觉效果,使图像更加清晰且便于观察。
2.3 速度场分析计算
将预处理完成的视频逐帧进行互相关计算,绘制并提取6个时间点速度场云图,截取射流高速阶段6 帧原图像如图10 所示,速度场结果如图11 所示,分析结果如下。
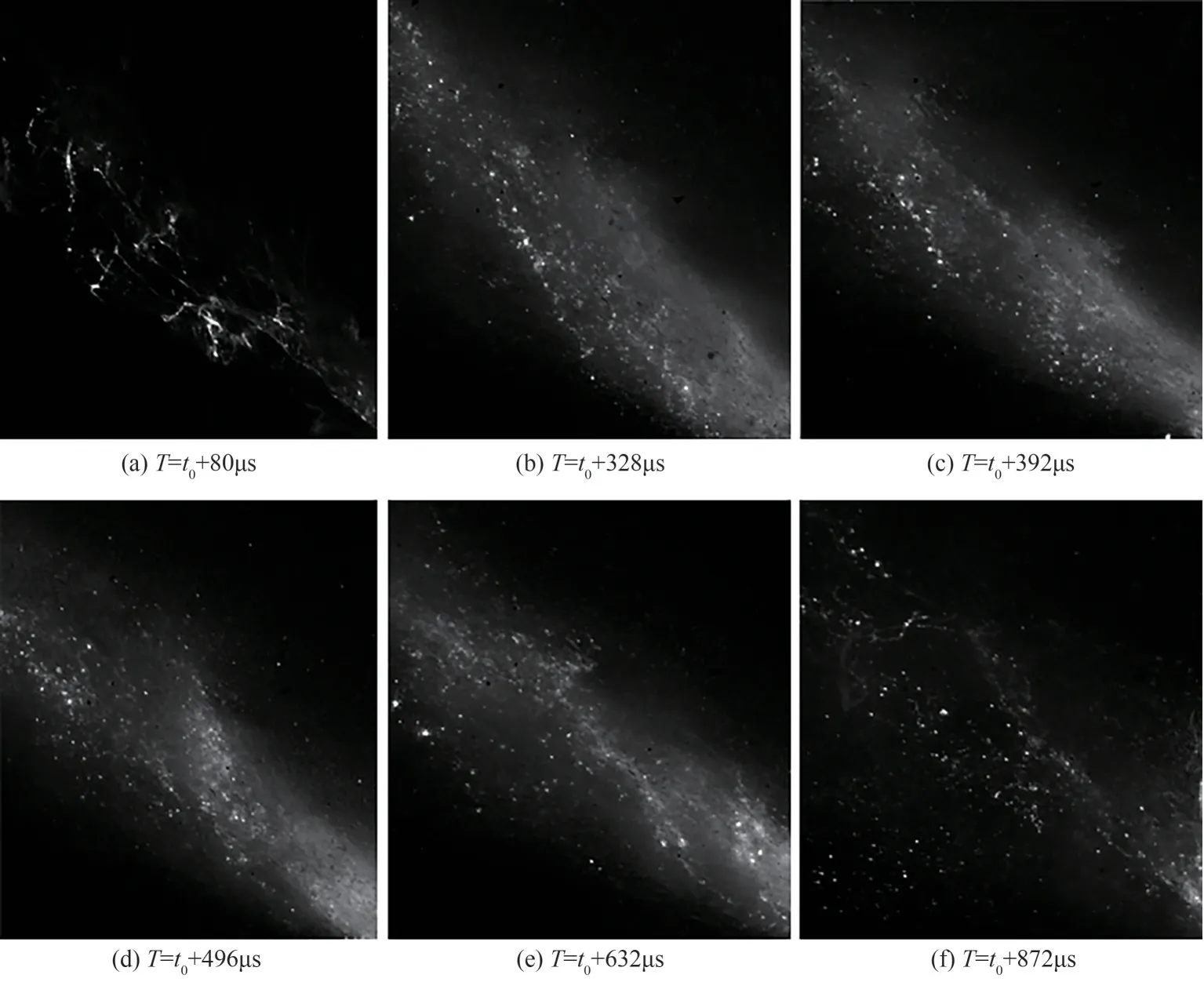
图10 不同时刻流场

图11 不同时刻速度场
(1)在T=t0+80μs时刻,由于电池内部温度处于较高状态、内部压力较大且喷射口尺寸较小,导致出口处射流速度较高,即70~85m/s 的高速区域更集中在出口处。此时流场方向呈现出单一性,大部分速度方向表现出较好的一致性。
(2)在T=t0+328μs 时刻,部分液滴发生气化现象,加之液滴的不稳定性和相互作用,导致电解液出口处的液滴运动轨迹已发生变化,高速区域向外扩展。
(3)在T=t0+392μs时刻,由于出口速度较高,液体具有较大的动量,而且因为空间扩散,液体流束的横截面积在增大,导致液体的速度相应地减小。同时考虑空气阻力等因素,高速区域的速度约为70m/s,相比之前时刻有所下降。然而由于动量守恒原理以及气液间速度的不一致性,液滴在某些区域的速度可能仍比出口的速度高。在出口的右上部区域中,发生气化的液滴受到温度和浓度差异的驱动,其密度会发生改变,在重力场的作用下部分液滴发生对流现象,但速度较小。
(4)在T=t0+496μs 时刻,液滴气化进一步进行,部分液滴断裂,各处速度相比前一时刻约下降15m/s。此时的高速区域的速度场仍呈现良好的一致性,但集中区域进一步向外扩展。在出口左方区域出现微弱的涡旋流动现象。
(5)当实验进展到T=t0+632μs 时,考虑到电池内部化学物质的不稳定性,可能存在短暂突然的激烈化学反应,导致存在部分液体在此时可以以相对高的速度喷出,但相较于实验初期,高速区域已不再集中,且速度值约下降20m/s。在出口上方部分区域可能存在湍流现象。
(6)最后在T=t0+872μs 时,各个区域的速度明显下降,各区域速度方向也较之前呈现规律性。此时至后续阶段,射流流场具有较好的稳定性。
如图12 所示,对单点速度场在时间上的变化进行拟合后可发现速度大致呈现为指数式下降趋势,实验前期阶段液滴速度会在短时间迅速降低,从4000μs后液滴速度呈现缓慢下降趋势。
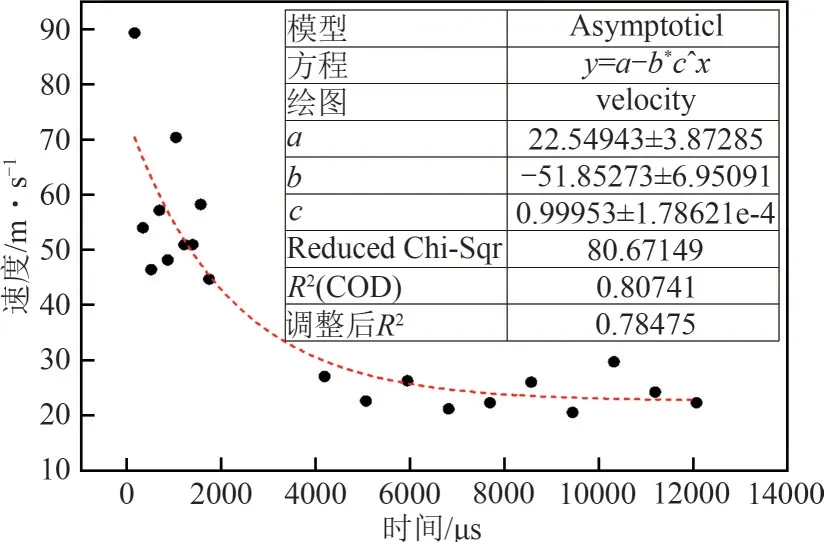
图12 单点速度变化曲线图
对于射流阶段一些特征点可采用人工标定计算出相应的速度,如图13 所示,该结果可作为上述实验方法的辅助验证参考,上述实验方法计算得到的结果与人工标定方法计算得到的速度处在相同区间中。且互相关算法已经形成了较为系统的理论体系,在一些商业化软件中已经得到了应用。作为较常用的图像测速算法,该方法较好地计算出相邻图像之间的空间相关性[16]。近年来也不断有学者在标准互相关算法基础上进行改进,Gao 等[17]搭建了简化的PIV装置,使用全连接神经网络互相关算法和光流神经网络算法对射流流场进行了计算对比,此研究的对比基准就是建立在标准互相关算法基础之上的。该实验结果具有可靠性。
3 结论
采用粒子图像测速技术对三元锂电池在热失控时的喷阀射流进行了深入研究。采用高通滤波结合自适应高斯滤波方法对视频图像进行了锐化和去噪处理,同时采用直方图均衡化对图像的灰度范围进行拉伸。随后采用结合亚像素精度插值方法的互相关算法对射流流场进行计算,从而实现了喷阀射流流场的可视化和速度场辨识分析。以下为主要结论。
(1)通过对视频中流场的初步分析发现,在射流初期,液滴会出现聚并现象,受表面张力和温度差异影响,较大尺寸的液滴以及液丝会出现断裂破碎。随着时间推移,流场左侧气液分界线与水平方向夹角也会缓慢减小,最后在出口处形成胶状物质。
(2)经过自适应滤波处理后,视频图像的PSNR 有所提升,能有效降低图像的噪声,图像平滑效果显著。此外,处理后能从有较大尺寸液团和液丝的模糊图像中清晰辨别检测尺寸较小的液滴。直方图均衡化进一步增强了视频图像的对比度,并突出了细节信息。
(3)在射流前期,速度范围大致在45~85m/s,该阶段速度快速下降,射流后期各区域的速度缓慢降低。高速区的集中会出现从出口处附近向外迁移的现象,流场的中心区速度方向呈现良好的一致性,在流场的边缘区域则会出现对流和湍流等流态现象。
但本文的工作研究仍有不足之处,在以下方面作出总结与展望。
(1)因电池个体差异性,暂未考虑用其他电池在不同焦平面的射流特性来定量验证此电池在此焦平面的射流特性,后续可研究不同焦平面下射流速度分布的对比结果。
(2)可考虑采用热线风速仪等传感器对射流速度场单点速度进行定量分析,作为实验结果的辅助验证,进一步提高实验结果论证的可靠性。
(3)对其他类型电池展开相关研究,以验证该方法的普遍适用性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
中国新闻周刊(2022年16期)2022-05-09
趣味(语文)(2020年6期)2020-11-16
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
中国储运(2015年3期)2015-11-22
噪声与振动控制(2015年4期)2015-01-01
决策与信息(2014年16期)2014-12-07
制冷学报(2014年3期)2014-03-01