一种基于能耗分析的高速动车组节能算法
2024-03-13 10:20王皓
铁道机车车辆 2024年1期
王 皓
(1 北京纵横机电科技有限公司,北京 100094;2 中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081)
高速列车已成为人们出行的重要交通工具,开发和研制适用于高速动车组的辅助驾驶策略,以降低高速列车运行能耗,提高高速铁路运输效率越来越受到国内外铁路运营和设备研发单位的关注[1-2]。
国外的仿真系统不适合中国国情,因此基于中国国情开发了高速动车组牵引制动仿真系统[3],使用动车组的动力学模型来推算动车组的运行状态[4-5],提供了方便直观的动车组控制系统,还绘制了轨道线路纵断面的细节。
仿真系统除了对高速动车组在轨道上运行状态进行模拟之外,还可以根据动车组的质量、速度和加速度进行能耗计算,进而为动车组节能相关研究提供有力的支持。国内在节能方面也展开多项研究。冯晓云等提出利用再生制动能量的节能最优控制策略[6]。丁超等通过试验和仿真结果分析指出速度与能耗成正比,为了确保准点到站,建议运营高峰期和低谷期采用不同的运行速度[7]。徐波等提出通过平稳的手柄操作利用再生制动实现节能的方法[8]。马少坡等提出利用惰行来节能的策略,但产生的运行时间延长不可避免[9]。柴杨等提出基于极大值原理的动态规划节能算法[10]。显然,高速动车组节能策略研究的难点在于,确保准点到站的前提下,同时将能耗降到最低。
通过建立能耗计算方程,证明通过降低目标速度可以降低高速动车组的能耗,然后以迭代算法寻找“最优目标速度”,并充分利用轨道坡度惰行加减速特性进一步节能,从而实现节能和准点到站两个目标同时实现,最后利用仿真平台对算法进行了验证。
1 高速动车组能耗计算模型
1.1 高速动车组运行产生的能耗类型
目前,我国高速动车组的牵引使用供电网提供的交流电,制动有再生制动和空气制动两种方式。在制动的时候,一般优先采用再生制动,制动力不足的时候再用空气制动补足。再生制动可以将动车组的动能转换为电能,这部分电能在不同车型上有不同的处理,最简单的是直接损耗掉,例如反馈给供电网或三热电阻。也有个别动车组会专门建立反馈电能的拓扑结构,将一部分反馈回供电网或给动电阻,而另一部分给车内辅助系统使用。
如果仿真平台支持有关车型,在不同工况下对再生制动产生电能的再利用,则在仿真迭代计算过程中,可以将这部分再生电能从总能耗中扣除。
这些反馈的电能,与速度的平方成正比,且在高速动车组能耗中只是较少的一部分。所以,下面主要计算高速动车组从供电网获取的电能总量。
1.2 节能分析
高速动车组运行能耗计算的基本参数为高速动车组在两个相邻的停车车站之间,按照时刻表规定的运行时间T准点运行。且在两个停车站之间运行期间,高速动车组的总质量M保持不变。
首先,两个停车站之间的运行距离是固定的,这个距离除以时刻表规定的运行时间,我们可以得到时刻表平均速度V平均。考虑到实际高速动车组必然存在加速和减速阶段,按照这个平均速度运行时,高速动车组必然迟到。因此,定义这个速度为“下限速度”。
其次,各个轨道区间都有最高限速,如果高速动车组在两个停车站之间,尽最大可能地贴近每个区段的最高限速V轨道限速运行,则必然早于时刻表到达车站(时刻表必须给所有列车的运行时间有足够的富余量)。因此,定义这个速度为“上限速度”。
再次,不论我们采用什么样的加减速策略,在两个停车站之间必然存在一个“理想目标速度V理想”,当高速动车组以此速度为目标速度运行时,既能确保按照时刻表规定准点到站,又能够实现能耗最小,因为这个速度满足V平均<V理想<V轨道限速这个区间范围。
最后,为了简化后续分析而限定:V限速为两个停车站之间所有轨道区段限速中的最高值;V理想在两个停车站之间所有轨道区段的值保持一致。
高速动车组运行的“目标速度”控制策略如下:
(1)当车速低于此速度时,应加速到该速度。例如,模拟司机加速策略进行加速。
(2)当车速等于此速度时,高速动车组应动用牵引力,维持此速度。在不动用牵引力的情况下,车速会超过此速度。
(3)任何时刻都应确保车速不会超过所在轨道区段的最高限速值,包括进站停车。
1.3 高速动车组运行产生的能耗计算
上一节介绍了节能策略的研究方向,即寻找“理想目标速度”。本节将建立能耗计算模型,理论上证明上一节策略的同时满足节能要求。
高速动车组在两个相邻的停车车站之间运行期间,从供电网获取的总能量为E总。E总包括动车组克服轨道阻力的能耗E轨、运行期间车载辅助系统能耗E辅、牵引系统能耗E牵3 个部分,可表示为式(1):
1.3.1 克服轨道阻力的能耗E轨
当高速动车组在两个相邻的停车车站之间运行时,期间所行走的轨道线路是固定的,动车组要克服轨道阻力做功。
此外,还要遵守以下安全运行规则:
(1)在任何公里标处都不能超过对应的轨道限速。
(2)在每个上坡路段都有足够的速度通过该路段。
(3)在分相区强制惰行的情况下,能够顺利运行到恢复供电的位置。
依据我国前铁道部制订的铁道行业标准《列车牵引计算规程》[5](以下简称《计算规程》)中规定的公式计算“动车组运行总阻力”。包括动车组坡道附加阻力、动车组曲线附加阻力、动车组隧道附加阻力、动车组运行基本阻力。
动车组运行总阻力可分为两个部分:本小节定义的来自轨道的与速度无关的部分E轨,即动车组坡道附加阻力、动车组曲线附加阻力和动车组隧道附加阻力;及下一小节分析的与速度相关的部分E牵,即动车组运行基本阻力。
由于轨道在两个相邻的停车车站之间是固定的,所以E轨是固定值。
1.3.2 辅助系统能耗E辅
动车组辅助系统包括空调、各种逆变器、多个风机等。正常情况下,这些设备的功率P辅是固定的。当动车组按时刻表准点运行时,两个车站之间的运行时间T为常数。不同的车型,辅助系统从供电网获得电能的具体路径不完全相同,其电能利用效率η也可根据型式试验确定,每个车型都是固定的变化规律。
辅助系统总能耗的计算公式为E辅=P辅×T×η,对于按照时刻表运行的高速动车组来说,运行时间T是固定的。效率η也是随速度变化函数,一般为线性。我们在仿真系统中,增加了各型高速动车组的能耗拓扑结构图,并在拓扑图中加入效率随速度变化的计算参数。
因此,在后续分析中,辅助系统能耗按速度的一次方程考虑。
1.3.3 牵引系统能耗E牵
E牵是与速度相关的能耗。具体来说,它包含高速动车组4 种状态下的能耗:加速、恒速、惰行、制动。当去掉克服轨道阻力做功的因素之后,其中加速状态,需要牵引系统消耗能量;恒速状态下,需要根据高速动车组运行状态和轨道参数情况进行分析,即可能需要牵引系统消耗能量提供牵引力,也可能需要制动系统提供制动力,只计算其中牵引的部分即可;惰行和制动状态,则不计入能量消耗。
于是高速动车组在两个停车车站之间的运行过程,划分为加速、恒速、惰行、制动4 种情况。而只需计算加速E加速和恒速E恒速两种情况下的能耗。
首先,恒速运行的情况。高速动车组动能不变,去掉上一小节克服轨道阻力能耗后,只需计算克服空气阻力做功的情况。为此,将高速动车组区间运行过程分为多个不同速度下的恒速运行阶段,每个阶段保持对应的恒定速度运行。根据《计算规程》,“动车组运行基本阻力”为fv=a+bv+cv2,其中v为运行速度,a、b、c为常数,通过型式试验获得,计算公式已经包含高速动车组的质量在内,由于区间内不存在乘客上下车的情况,这个质量为常数,且都是正数。
于是,动车组运行期间有N恒个恒速区段,可表示为式(2):
式中:Svi为动车组以恒速vi运行的距离。
因此,可得到是E恒速速度v的一元二次方程。
其次,加速运行的情况。将动车组整个运行期间划分为N加个加速阶段,每个加速阶段内的加速度相同。定义第i个加速阶段开始的动能为Ei0,开始的速度为vi0,结束的动能为Ei1,结束的速度为vi1。且有第i个加速阶段结束的动能等于第i+1个加速阶段开始的动能。
整个区间内加速运行的总能耗为动能的增加量和克服空气阻力做功,为式(3):
式中:E风阻i为第i个恒定加速度阶段克服风阻消耗的能量。当第i个恒定加速度阶段高速动车组运行总时间为Ti,恒定加速度为Ai,风阻力fv=av2+bv+c为速度的一元二次方程,可表示为式(4):
展开后可知E风阻i是速度v的一元三次方程。而一元三次方程的曲线类似正反两个抛物线拼接在一起,如图1 所示。可见,当速度v小于曲线上的极大值M时,曲线递增;当速度v大于曲线极小值N时,曲线递增;当速度v介于极大值和极小值之间时,曲线递减。
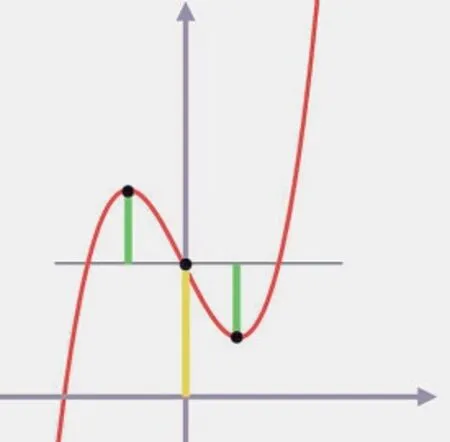
图1 能耗与速度的一元三次方程曲线示意图
考虑到高速动车组的运行速度一般很高,可以认为E风阻i在整个线路上的绝大部分路段是随着速度的增加而显著增长的。
1.3.4 能耗模型的特性
由于各个加速阶段之间可能不连续,例如两个加速阶段中间掺杂了恒速、惰行、制动等阶段。所以其计算公式会达到超出速度的3 次方甚至更高次方。
当高速动车组以不同的“目标速度”运行时,其能耗计算结果明显随速度的增加而递增,这点通过仿真平台进行能耗计算可获得。以京沪线下行方向为例,计算某车型在不同“目标速度”下的总能耗情况,可明显看出,能耗随着“目标速度”的增加而增加,如图2 所示。
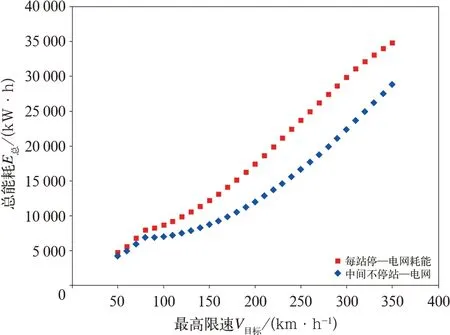
图2 不同“目标速度”下,高速动车组能耗值曲线
2 基于能耗模型的节能算法
根据以上对能耗模型的分析,我们可以得知节能算法有几个约束条件:其一,按照时刻表准点运行;其二,整条线路的能耗优化,可以通过两个相邻停车车站之间运行时的能耗优化实现,所以直接针对两个停车车站之间的高速动车组运行,寻找最节能的“理想目标速度”,不同停车车站之间的“理想目标速度”可能不同;其三,轨道本身的限速仍然有效。
基于以上分析和约束条件,提出的节能算法目标是寻找“理想目标速度”V优,具体算法描述如下:
首先,整条轨道线路的能耗计算,通过两个相邻停车车站之间运行的能耗累加得到。
其次,两个相邻停车车站之间的“理想目标速度”通过迭代获得。具体步骤为:
(1)取两个车站之间轨道最高限速Vmax,并通过仿真得到两个车站间最短运行时间T短,以此限速运行则高速动车组必然比时刻表早到车站。
(2)根据时刻表规定两个车站之间运行时间,计算出两站间平均运行速度Vmin,并通过仿真得到两个车站间最长运行时间T长,以此限速运行则高速动车组必然晚于时刻表到达车站。
(3)在Vmax和Vmin之间用二分法找到新的“目标速度”Vmid,通过仿真得到两个车站之间运行时间Tmid,对比时刻表时间,可缩小目标速度筛选区间,重复本步骤,直到高速动车组在两个车站之间的运行时间满足误差要求,或本步骤迭代次数达到规定上限,这时的Vmid就是V优。一般使用的时间误差为±5 s,迭代次数上限为20 次。
最后,有两点需要注意。其一,在仿真过程中,只有当两个车站之间的轨道限速高于算法迭代时规划的“目标速度”时,该速度才生效,即轨道限速优先。其二,在仿真过程中,仅允许列车以惰行方式,超过“目标速度”,但不允许车速超过轨道限速。
3 仿真结果
文中使用开发的仿真平台对本策略进行了仿真。
仿真中使用的车型参数为CRH3 型高速动车组,使用武广线,武汉至广州方向。对比操作策略有3 个,分别为:司机操作、理想目标速度策略、基于Pontryagin 极大值理论的最优控制策略[10](以下简称最优控制)。这3 个操作策略,都能确保高速动车组能按时刻表规定时间运行到站。后两个策略都跟司机操作策略的能耗进行对比。
使用的时刻表及到站时间对比见表1,表中最优控制到站时间跟司机操作到站时间相同。通过迭代寻找“最优目标速度”时,当满足条件“至少提前5 s 到站”时就停止迭代了,这是为了减少计算量做的折衷选择。

表1 相同时刻表下不同策略到站时间对比
接下来,选取了两个车站区间的运行数据进行对比。需要指出的是,针对不同的车站区间路况和时刻表运行时间,算法找到的“理想目标速度”是明显不同的。
对比结果之一,区间武汉—赤壁北,仿真对比结果如图3、图4 所示。图3 中的“理想目标速度”约为253 km/h,比司机操作节能14.42%,而图4 中的最优控制策略,仅比司机操作节能2.46%。
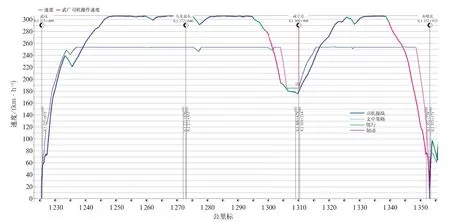
图3 司机操作vs 文中策略,武汉—赤壁北

图4 司机操作vs 大数据优化结果,武汉—赤壁北
对比结果之二,区间汨罗东—长沙南,仿真对比结果如图5、图6 所示。图5 中的“理想目标速度”约为220 km/h,比司机操作节能38.1%,而图6中的最优控制仅比司机操作节能12.93%。

图5 司机操作vs 文中策略,汨罗东—长沙南

图6 司机操作vs 大数据优化结果,汨罗东—长沙南
在两个相邻停车车站之间,不论轨道线路可以根据坡度、曲线、桥隧、分相等因素划分多少个区段,“理想目标速度”都是一致的。而在不同的停车车站之间,“理想目标速度”可以不同。所以,对比上面两个结果,“理想目标速度”的值是不同的。
4 结论
综上所述,文中算法充分利用计算机高速运算的特性,通过仿真和迭代搜索的方式,找到“理想目标速度”,在确保准点到站的前提下,显著降低区间内高速动车组的运行速度,同时充分利用轨道坡度产生的惰行加速特性,实现更加明显的节能效果。
猜你喜欢
铁道通信信号(2020年6期)2020-09-21
海峡姐妹(2020年2期)2020-03-03
知识窗(2019年5期)2019-06-03
铁道通信信号(2018年11期)2019-01-19
装备制造技术(2017年6期)2017-07-31
制造技术与机床(2017年12期)2017-02-02
现代城市轨道交通(2016年6期)2017-01-05
铁道通信信号(2016年11期)2016-06-01
实验技术与管理(2014年9期)2014-03-11
西安工程大学学报(2014年2期)2014-02-28