
一种基于红外图像的空间目标探测方法
2024-03-11 04:05苏振华刘新颖丁奕冰张玉梅何振东张晓俊
航天器环境工程 2024年1期
苏振华,刘新颖,丁奕冰,李 季,张玉梅,尹 亮,何振东,张晓俊
(1.航天东方红卫星有限公司; 2.北京卫星环境工程研究所:北京 100094)
0 引言
随着以“星链”为代表的大规模星座建设,低地球轨道上运行的空间目标数量急剧上升,空间资源异常紧张。为确保航天器在轨运行安全,需要实时监视空间环境,准确预报在轨航天器的碰撞风险。
空间监视的基本任务包括:对绕地运行的在轨或退役的卫星、被遗弃的火箭残骸等空间目标进行探测,检测其是否会干扰空间飞行器等的运行;预报空间目标重新进入地球大气层的时间和位置等[1]。空间监视系统应一方面具备辅助识别潜在威胁的能力,另一方面具备预测空间目标轨道的能力,从而实现对空间碰撞和空间攻击行为的告警。
美国、俄罗斯、欧洲的空间目标探测与识别技术发展较为迅速[2],例如:美国地基新型S 频段空间篱笆雷达和利用轨道优势进行探测识别的作战响应空间-5(ORS-5)卫星[3],俄罗斯具有空间目标识别能力的新型高频沃罗涅日(Voronezh)雷达、雷达/光学结合探测识别的树冠(Krona)系统[4],ESA 空间碎片望远镜及德国试验监视与跟踪雷达(GESTRA)等[5]。国外空间目标监视系统正在发展高频雷达和大口径大面阵光学探测识别设备,建立天基、地基互补探测识别系统,研究雷达与激光、光学相结合的探测识别技术等。相比于雷达的主动探测模式,天基红外探测被动地收集目标红外辐射信息,隐蔽性更强。此外,红外探测系统还具有全天时、探测范围广、定位精度高、受电磁干扰影响小等优点[6]。红外探测过程主要为:红外传感器收集物体红外辐射信息成像;通过目标检测、跟踪与识别等关键环节实施,获得目标位置及运动轨迹。目前,红外目标探测方法主要针对的是地面背景下的强目标探测,无法适用于空间背景下高速运动小目标的探测。
本文提出一种基于红外图像的空间目标探测方法,综合采用目标分割提取、重心法提取质心、星图匹配剔除背景等方法实现目标检测,综合采用轨迹关联、目标分类等方法实现目标跟踪识别,能够快速、准确、有效地探测空间目标,为我国空间目标监视提供必要手段。
1 目标特性
在空间中,受探测卫星与目标之间的轨道动力学特性的约束,目标探测距离远。因此红外图像中的空间目标仅表现为一个亮点,其尺寸仅为几个至几十个像素,无目标的大小、形状、纹理等相关特征信息[7];而且图像信噪比较低,空间目标亮度的幅值相比于背景、噪声和杂波梯度不大,无法直接分辨。因此,需要对空间目标特性进行研究,提高目标探测的实时性,提升检测概率,降低虚警概率。
1.1 目标红外辐射特性
以具有典型代表性的卫星为例,其外表面主要由舱板、太阳电池阵、包覆多层、发动机和天线构成。其中,舱板的主要材质为铝蜂窝,空间温度变化范围-30~60 ℃;太阳电池阵主要由太阳电池板和基板组成,温度变化范围-90~90 ℃;包覆多层(聚酰亚胺)的主要温度变化范围-150~150 ℃,温度变化时间10~20 min。
卫星的红外辐射主要来自于卫星本体的辐射和对空间环境的辐射反射。卫星除了其本体外,太阳电池阵的尺寸较大,产生的辐射强度值也较大。
选取常规的立方体结构卫星作为研究对象,且卫星带有双太阳电池阵的典型搭配模式。以XSS-11卫星为例,卫星本体为边长60 cm×100 cm×60cm 的立方体,两侧各有1 个约60 cm×60 cm 的太阳电池阵。卫星本体多层表面发射率0.69,OSR 表面发射率0.79,电池阵正面的表面发射率0.83,电池阵背面的表面发射率0.8。地球轨道中运行的立方体卫星的本体表面可各自命名为对天表面、对地表面、前向表面、后向表面、左侧表面和右侧表面,参图1所示。
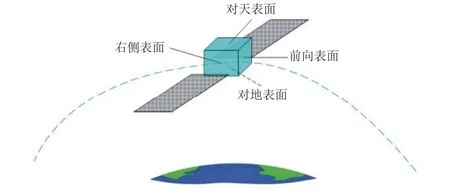
图1 卫星表面构成示意Fig.1 Schematic of satellite surface composition
卫星本体各表面及太阳电池阵的温度(星表典型部位)如表1 所示,其中太阳电池阵的温度包括电池板的正面温度和背面温度。通过分析可以发现,星体的对天表面和太阳电池阵表面的温度较高,有利于红外探测器成像。
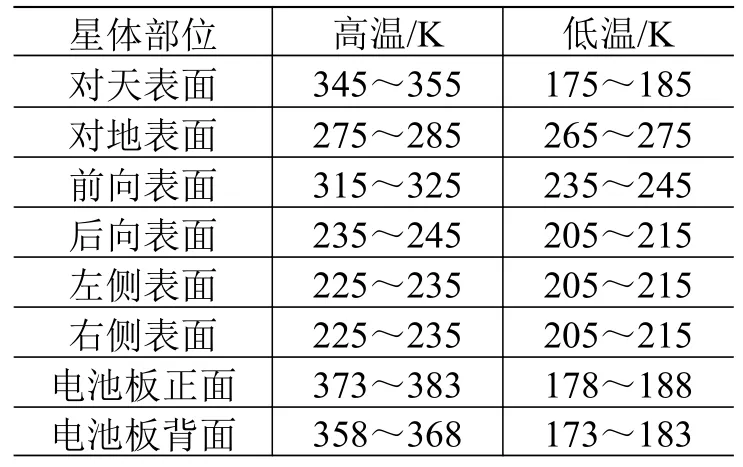
表1 卫星本体各表面及太阳电池阵的温度Table 1 Surface temperatures of satellite and solar array
通过表1 对星体表面温度的统计分析,根据表征热辐射强度、波长、温度之间关系的普朗克公式,结合红外辐射特性分析理论,计算得到立方体卫星的红外辐射特性如表2 所示,其长波辐射强度较强,表明星体向外辐射的波长较长。因此,卫星目标探测适合采用长波成像传感器。
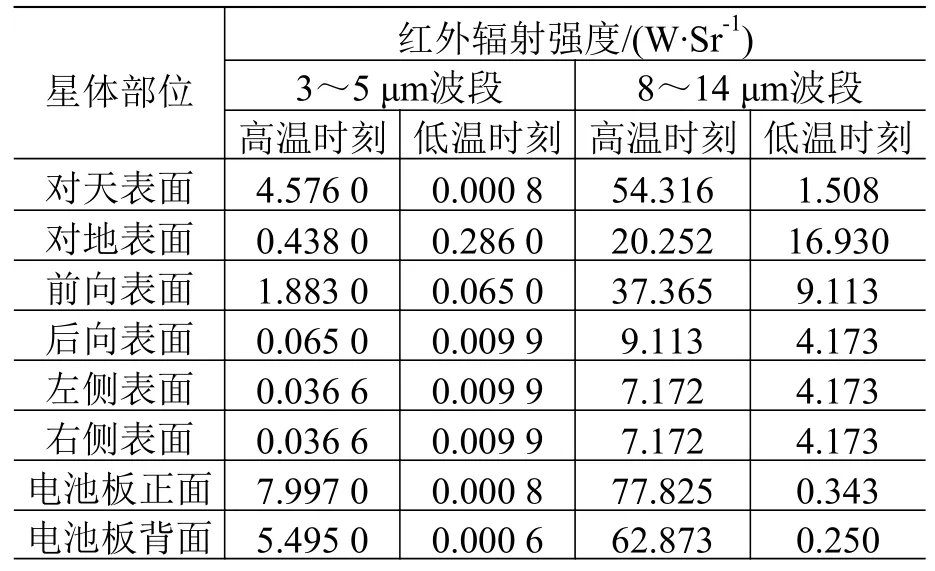
表2 卫星各表面红外辐射强度Table 2 Infrared radiation intensities of satellite surfaces
1.2 目标运动特征
目标在红外图像中无典型特征信息,且受恒星和噪声的影响,会被淹没在背景中。因此,需要综合利用目标的方位角、角速度、运动轨迹、亮度值和亮度变化等信息判断目标特征和行为(参表3),并对其进行探测。
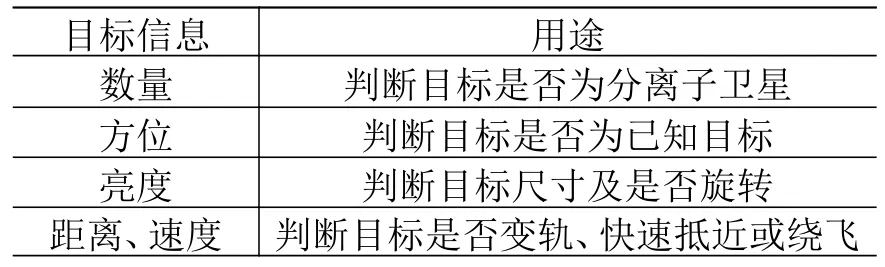
表3 目标信息及用途Table 3 Target information and its purpose
2 目标探测方法
在空间目标监视任务中,红外成像传感器多数情况下以深空背景成像。红外传感器成像信息包括[8-9]真实目标、背景信息及干扰噪声3 类,可以表示为
式中:I(x,y)代表红外图像;S(x,y)代表红外图像中探测到的目标信息(包括非合作目标等);N(x,y)代表红外图像中的噪声;B(x,y)代表红外图像的背景信息。目标信息在红外图像中表现为单独的亮点,灰度值比周边背景高,且与背景的关联性弱,在频域幅值有较大的跳变,属于图像中的高频分量。背景信息是探测环境中具有较大发射能量的物体的红外辐射信号,连续分布的背景信息具有灰度变化缓慢、像元之间关联性强的特点,频域幅值变化较小,集中于图像的低频范围;在地球大气层等背景图像中的边缘处,其灰度幅值变化剧烈,属于图像信息中的高频部分。
根据空间运动目标的特征,红外目标探测主要分为目标检测、跟踪与识别等环节,详细如图2 所示。首先进行背景抑制预处理,提升目标显著性,降低背景的干扰;然后通过自适应阈值方法分割提取目标信息;最后经过聚类、关联跟踪等帧间处理方法,实现噪声干扰去除,获得目标轨迹信息,确定真实目标。
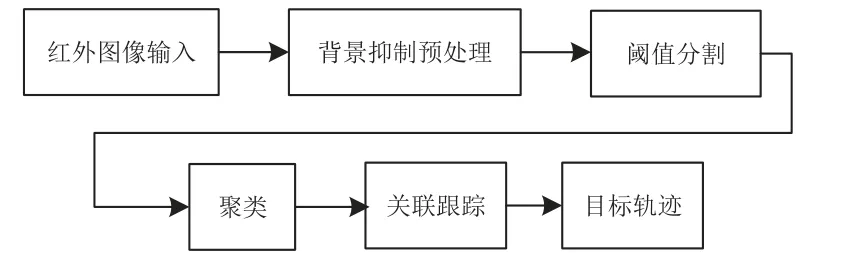
图2 红外目标探测流程Fig.2 Flow chart of infrared target detection
根据空间目标监视任务的需求,必须能够随时对所关注目标进行有效的检测,而监视背景中不仅有大量物理特性与目标接近的恒星干扰,还包括小麦哲伦云图像、银道面背景大气临边背景等干扰,以及大量的空间碎片和红外相机的系统噪声,所有这些干扰将严重影响检测概率。同时,由于目标在像面上成像为点目标或斑点目标,光学特性很弱,尺寸和亮度特征都可能小于恒星,故当与恒星在视场中交叉相遇或被恒星瞬间遮挡时,对目标的稳定跟踪会被破坏。
2.1 目标的检测
2.1.1 图像的目标分割算法
根据实际深空背景图像中目标灰度值很大而背景灰度值较小这一特点,采用基于迭代法[10]的阈值分割算法有利于提高目标的检测概率,降低虚警率,同时减小运算量,便于图像实时处理。
迭代法可以自动地得到阈值,其主要过程为:
1)估计初始的阈值T,一般用图像最大和最小灰度值的平均值。
2)用T分割图像,得到2 组像素(G1和G2)。
3)分别计算G1和G2中所有像素的平均灰度值μ1和μ2,
式中:Ni为图像中属于Gi的像素点数;Ii为Gi中某像素的灰度值;ni为Gi中灰度值为Ii的像素点数。然后更新阈值为T=(μ1+μ2)/2。
4)重复过程2)、3),直到逐步迭代所得T值的变化小于事先定义的参数T0。
通过天基红外相机探测典型空间目标的红外成像特性如图3 所示,目标成像较弱小且亮度不如恒星。采用基于迭代法的阈值分割法对该红外图像进行分割,结果如图4 所示。

图3 通过天基红外相机探测空间目标的红外成像Fig.3 Infrared imaging of space targets detected by spacebased infrared cameras
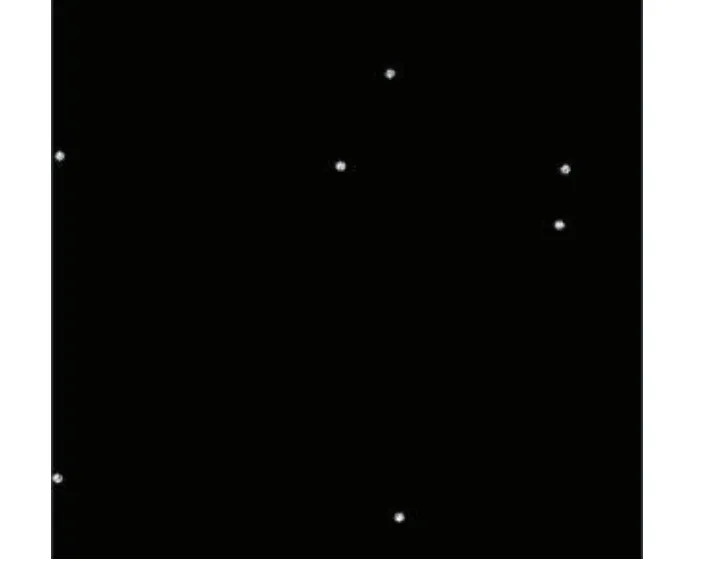
图4 迭代法阈值分割目标结果(加亮)Fig.4 Threshold segmentation by iterative method(highlighted)
可以看到,该方法能够自适应地选取合适的阈值,实现对红外图像中所有目标的分割。与其他算法相比,该算法不仅能精确地分割出目标,而且计算时间短、简单易行,满足对于深空背景中空间目标的分割需求。
2.1.2 基于重心法的目标质心提取
图像分割后得到的目标并不一定是单像素的,为获得高精度的质心位置,采用重心法提取目标质心。通过图像预处理,可以把星体成像分割成非连通区域;利用区域内图像像素的重心,可以得到亚像素级的星体位置。设红外图像的目标成像模型为
则目标质心位置为
利用重心法提取目标质心的结果如图5 所示。可以看到,该方法提取的目标质心位置能够真实反映目标的实际位置,同时减少相邻目标之间的相互干扰,满足对提取空间目标质心位置的要求。
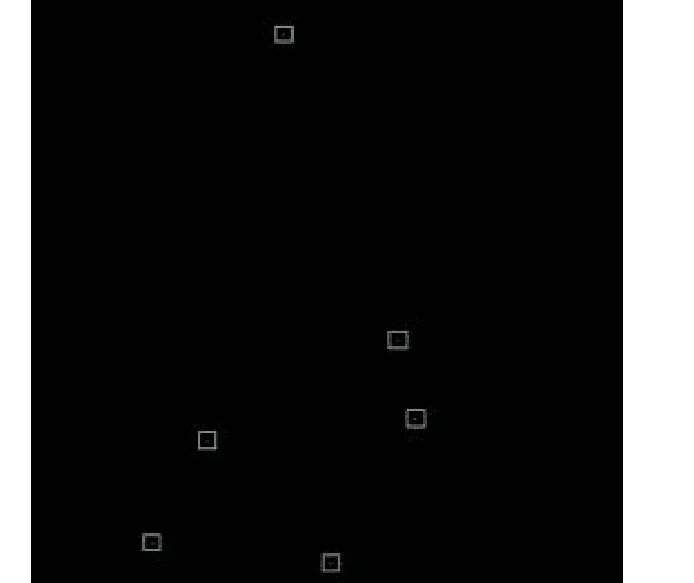
图5 重心法提取目标质心结果(质心为矩形框的中心)Fig.5 Center of mass (center of the rectangular box in the picture) extraction with center of gravity method
2.1.3 基于星图匹配的恒星背景剔除算法
由于深空背景下目标检测的主要干扰是恒星,适用星图匹配的方法来剔除恒星的干扰。星图匹配就是将观测图像中星点的参数与星图库中恒星的相应参数进行比较匹配,以确定观测图像中的点是否是恒星点,匹配成功则认为是恒星点,否则不是恒星点。
星图匹配识别算法主要包括三角形匹配算法[11]、多边形角距匹配算法[12]和Bezooijen 发明的恒星识别法等,均能实现较好的星图匹配效果,不同算法的天空覆盖范围、数据库大小、噪声干扰稳定程度、计算速度等性能具有差异。当测量误差较大时,余度匹配和误匹配会导致识别成功率显著下降。受限于特征维数限制的影响,大部分算法对于有干扰的星图匹配效果不理想。Hausdorff 距离(Hausdorff distance, HD)是度量2 幅图像之间相似性的一种方法,计算过程中不需要建立2 幅图像间点与点对应的关系,因此适用于被噪声污染或失真严重图像的处理。综上,本文采用基于HD 进行星图识别[13]的算法。该算法除了识别率高、抗噪性强,还具有识别速度快和抗旋转特性好的优点。
利用星图匹配等方法剔除大部分恒星后,剩余候选目标点包括目标、未剔除恒星和噪声点等。其中,噪声点在每帧的出现是随机的,可以利用多帧轨迹连续信息予以排除;对于目标和恒星,可以根据其各自运动速度的大小和方向等运动特征的变化来区分。
2.2 目标的跟踪识别
在低信噪比情况下,检测未知位置和速度的运动目标的难点主要体现在:背景的统计先验信息缺失;红外图像的信噪比较低,利用单帧图像信息无法实现目标的准确检测;空间目标表现出在不同的时间点上出现然后消失等;空间目标不具备形状、纹理等显著特征;无法直接区分出恒星和真实目标;仅有的检测信息是目标的亮度和像面移动速度。在探测到多个疑似目标后,需要对目标进行跟踪探测,完成对目标的识别。
2.2.1 基于轨迹关联的多目标编批算法
多目标编批技术通过制定合理的行为准则,能够判别空间目标航迹起始位置;在整个目标探测过程中,可以有效地维持航迹;可在视场中的目标消失的情况下,实现对航迹自动判别消亡[14-15]。
多目标编批技术主要处理过程包括:每出现一个新目标,算法自动赋予其一个新的编号,该编号不同于已存在或已消亡的任何一个目标编号;每个目标的编号均始终保持不变,在该目标被遮挡或与另外目标发生交叉运动的情况下,仍能够维持该编号不变,直到该目标的生存周期结束。本文在空间目标编号维持过程中采用一种适用于目标探测的多参量数据关联算法,对于多目标交叉问题采用轨迹外推方法去除噪声干扰,即利用广义霍夫变换实现空间目标二次曲线拟合过程中的噪声点去除;利用参数空间模糊截集内的有效点,分析反推直角坐标系下的有效位置点,利用最小二乘曲线拟合这些有效点,实现目标位置的预测[16]。
目标提取过程中,存在将距离较近的多个目标连接起来作为一个目标处理,将一个大目标分割成许多小目标,噪声干扰导致检测到虚假目标,或者弱小目标无法被检测等情况。在上述情况中,算法可能给多条航迹分配一个观测值,或者一条航迹有多个观测值。这将会导致空间目标测量过程中,目标与观测值无法一一对应,因此需要利用系统的方法实现目标当前状态的更新。本文采用“最近邻”数据关联算法实现目标轨迹关联,其为一种贪心算法,通过采用离关联门中心最近的观测值更新多个目标最新状态,具有直观、计算量小的优点。
在探测多个目标的过程中,空间目标的运动会导致彼此之间存在相互遮挡的情况,不同目标位置存在重叠,因而短时间内无法区分不同目标。在分离相互遮挡的空间目标时,目标的编号维持会出现错误。对于目标交叉运动的情况,本文采用最小二乘曲线拟合进行轨迹外推。
2.2.2 基于运动信息的目标分类算法
基于深空背景下目标和恒星间的运动特性区别,主要针对目标运动中的速度信息和运动方向矢量信息与恒星进行区分,其中根据方向矢量的分类方法如下:
1)根据目标运动方向的矢量信息,建立8 个维度的方向矢量邻域,即东、东南、南、西南、西、西北、北、东北各方向以其方向矢量左右22.5°作为方向矢量的邻域,即以tan 0°、tan 45°、tan 90°、tan 135°、tan 180°、tan 225°、tan 270°、tan 360°这8 个正切函数值作为各邻域中心参数,在每个参数的0~±0.414的数值范围之内算作一个方向矢量的邻域;
2)根据目标检测过程中得到的目标轨迹信息集合,即坐标信息和方向矢量,可以计算出每个目标的运动方向矢量,并将信息更新到目标集合中;
3)根据目标集合中每个目标的方向矢量进行8 个维度分类,最终保留维度中目标较少的一个集合,并更新目标集合。
根据速度信息分类的方法如下:
1)根据目标检测过程中得到的目标轨迹信息集合,即坐标信息和方向矢量,以及逝去的帧数,即逝去的时间,可以计算出每个目标的运动速度数值,然后将信息更新到目标集合中;
2)根据计算出的目标集合中每个目标的速度将目标分成2 类,最终保留其中元素较少的一个集合,并更新目标集合。
执行完上述2 种分类后,即完成了以方向矢量信息和速度信息进行分类确认跟踪目标的过程。
3 实验验证
为了验证本方法的检测效果,采用真实的在轨空间目标红外成像图像进行实验验证,实验图像参见图3;阈值分割法对红外图像进行目标分割的实验结果参见图4;重心法提取目标质心的实验结果参见图5;采用基于轨迹关联和运动信息分类的方法对剔除恒星之后的目标进行跟踪识别实验,结果如图6 所示。最终结果表明,本文采取的方法能够克服深空背景条件下干扰大、目标小、信噪比低的难点,在1 s 内实现从发现到跟踪识别空间目标。
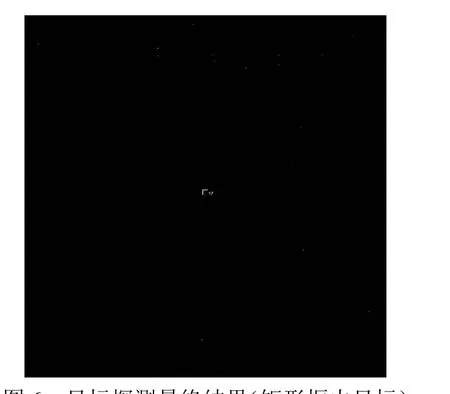
图6 目标探测最终结果(矩形框内目标)Fig.6 Final result of target detection (target in rectangular box)
4 结束语
本文针对空间目标探测需求,通过分析深空背景下空间目标的特征,提出一种基于天基红外图像的空间目标探测方法,采用相适应的目标检测算法和目标跟踪识别算法,实现深空背景下弱小目标的探测。针对新提出的算法,采用典型空间目标的在轨红外成像图像进行空间目标探测实验,结果表明该方法能够解决深空背景条件下干扰大、目标小、信噪比低的难点,实现1 s 内快速、准确探测目标,满足空间环境监视对目标探测的实时性好、检测概率高、虚警概率低等要求。
猜你喜欢
环球时报(2022-05-23)2022-05-23
汽车工程师(2021年12期)2022-01-17
金桥(2021年4期)2021-05-21
小哥白尼(神奇星球)(2021年11期)2021-03-08
当代陕西(2020年14期)2021-01-08
电子制作(2019年7期)2019-04-25
百科探秘·航空航天(2018年12期)2018-12-29
奥秘(2018年10期)2018-10-25
贵州师范学院学报(2016年4期)2016-12-01
光学精密工程(2016年3期)2016-11-07
