
基于RCMFME和AO-ELM的齿轮箱损伤识别策略*
2024-03-11 01:14沈羽,赵旭
机电工程 2024年2期
沈 羽,赵 旭
(1.河南质量工程职业学院 机电工程学院,河南 平顶山 467000;2.海南科技职业大学 机电工程学院,海南 海口 571126)
0 引 言
齿轮箱是各类工程设备的配套零部件,常用于增加扭矩或改变传动方向,因此,其工作环境多为重载、高速等情况,使得轮齿易发生疲劳失效故障。当齿轮箱轮齿发生故障后,不仅会降低扭矩的传动精度,还会增加设备的振动及噪声,不利于设备的平稳运行,以致发生事故。
因此,研究齿轮箱的故障识别方法和状态监测模型对确保齿轮箱的高效运行具有重要意义[1-2]。
齿轮箱的振动信号为非线性的时间序列,以往的线性方法难以对其进行有效分析[3]。目前,近似熵、样本熵和模糊熵等非线性动力学指标被广泛用于齿轮箱及其零部件的故障诊断,并取得了不错的效果[4]。
张玉学等人[5]将局部均值分解(local mean decom-position,LMD)与近似熵相结合,用于提取齿轮箱的故障特征,利用极限学习机的诊断结果验证了该方法的有效性;但近似熵的分析结果受数据长度的影响非常大,无法有效处理短数据序列。刘晓悦等人[6]提出了基于自适应噪声完全集合经验模态分解和样本熵的风机齿轮箱故障诊断方法,采用该方法得到的诊断结果验证了样本熵作为故障特征的表征指标的有效性;但样本熵对数据长度依然比较敏感,在分析长度较短的序列时会出现未定义的结果。ZAIR M等人[7]提出了基于集成经验模态分解和模糊熵的滚动轴承故障诊断方法,采用该方法得到的诊断结果证明了模糊熵的特征表达能力优于样本熵;然而模糊熵在定义时仅考虑了信号的局部特征,忽略了数据的全局特征。为此,ZHU Ke-heng等人[8]考虑了时间序列的全局波动,提出了全局模糊熵指标,并结合自适应局部迭代滤波,准确地诊断了滚动轴承的不同故障。
然而,无论是模糊熵或者全局模糊熵,都只是从单个尺度对时间序列进行评估,分析得不够全面,不可避免地遗漏了其他尺度上的有效信息[9]。
针对信号的多尺度分析,学者们开展了大量的研究。
ZHU Ke-heng等人[10]提出了多尺度全局模糊熵指标,并将其用于滚动轴承的故障诊断,有效地提取了振动信号中的故障特征,实现了滚动轴承故障的识别目的;然而该指标的粗粒化处理不够精细,会导致大量有效信息被遗漏和忽略[11]。为进一步提高多尺度分析的精度,ZHANG Zi-ying等人[12]2提出了精细复合多尺度全局模糊熵(refined composite multiscale global fuzzy entropy,RCMGFE),准确识别了滚动轴承的故障类型;然而RCMGFE只是考虑信号的全局特征,忽略了信号的局部特征,分析得不全面。
在模式识别方面,由于极限学习机(extremele-arningmachine,ELM)具有极快的效率和可观的性能而被广泛应用于图像识别和故障诊断领域[13-14]。但ELM的权值和阈值是随机生成的,其泛化性和鲁棒性较差。为此,MENG Ling-yu等人[15]采用遗传算法对其参数进行了优化,并准确识别了滚动轴承的故障类型;然而遗传算法的局部搜索能力较差,优化时易得到的是次优解而非最优解。CHEN Yin-sheng等人[16]采用粒子群算法对ELM的参数进行了搜索,诊断结果验证了粒子群算法优化的ELM模型取得了优于遗传算法优化的ELM模型的分类结果;然而,粒子群算法的局部搜索能力较差,易陷入局部最优解。
针对上述问题,笔者提出一种基于精细复合多尺度模糊测度熵(refined composite multiscale fuzzy measure entropy,RCMFME)和天鹰优化器优化极限学习机(aquila optimizer-extreme learning machine,AO-ELM)的齿轮箱故障诊断方法。
首先,笔者对精细复合多尺度模糊熵的矢量构造方式进行改进,充分考虑信号的局部特征和全局特征在信号复杂度表征中的贡献,提出RCMFME,并将其用于提取齿轮箱振动信号的故障特征;随后,利用天鹰优化器对极限学习机的参数进行优化,获得参数最佳的分类模型;最后,将故障特征输入至AO-ELM模型进行训练和测试,实现样本的故障识别目的。
1 精细复合多尺度模糊测度熵
1.1 模糊熵
模糊熵基于信号的局部均值进行定义,能够有效测量系统的局部特性变化,但无法准确评估系统的全局波动。
由于模糊熵理论较为成熟,此处笔者仅介绍其基于局部均值的矢量构造过程。
对于时间序列{x(i),i=1,2,…,N},初始化嵌入维数m,则生成矢量如下:

(1)

x0(i)公式如下:
(2)
1.2 模糊测度熵
LIU Cheng-yu等人[17]从时间序列的局部特征和全局特征的全面表征入手,提出了模糊测度熵(fuzzy measure entropy,FME),并将其用于生物序列的复杂性分析,证明了FME的有效性。
与模糊熵只强调时间序列的局部特征相比,FME有着更好的信号表征性能和统计可靠性。
其理论如下[18]:
1)对于时间序列{x(i),i=1,2,…,N},初始化嵌入维数m,从首个元素开始,挑选连续m个x值构造序列Xm(i)={xi,xi+1,…,xi+m-1},接着可以构造新的时间序列。
其定义如下:
XLm(i)={xi,xi+1,…,xi+m-1}-x0(i)
i=1,2,…,N-m+1
(3)
式中:XLm(i)为新的局部序列片段;x0(i)为序列片段Xm(i)的局部均值;
2)求解整个序列的均值xmean,通过从序列片段Xm(i)减去全局均值xmean,以此来构造全局序列片段XFm(i)。
其定义如下:
XFm(i)={xi,xi+1,…,xi+m-1}-xmean
i=1,2,…,N-m+1
(4)
3)定义局部序列片段XLm(i)和XLm(j)之间的距离为dLm(i,j)。类似地,全局序列片段XFm(i)和XFm(j)之间的距离为dFm(i,j),则定义如下:
(5)
4)初始化梯度n和相似容限r,计算XLm(i)和XLm(j)之间用于反映局部特征的相似度DLm(i,j),以及XFm(i)和XFm(j)之间用于反映全局特征的相似度DFm(i,j)。其定义如下:
(6)
在全部满足1≤i,j≤N-m的条件下,相似度DLm(i,j)和DFm(i,j)的平均值分别定义为φLm(n,r)和φFm(n,r),具体如下:
(7)
5)当重构矢量的维数为m+1时,重新构造矢量XLm+1(i)和XFm+1(i)。重复执行步骤1)~步骤3),重新求解φLm+1(n,r)和φFm+1(n,r);
6)模糊局部测度熵和模糊全局测度熵定义如下:
(8)
最后,时间序列的模糊测度熵可以定义如下:
FME(m,n,r,N)=FE(m,n,r,N)+FFE(m,n,r,N)
(9)
从以上计算过程可知,FME充分综合了时间序列的局部特征和全局特征,其能够更准确地测量时间序列的复杂性。
1.3 精细复合多尺度模糊测度熵
为了完成模糊测度熵的多尺度分析任务,并且避免传统粗粒化处理的缺陷,笔者提出了精细复合多尺度模糊测度熵方法。其具体步骤如下:

(10)
式中:τ为尺度因子;
2)在尺度因子τ下,求解所有τ个粗粒化序列矢量对φLm(n,r),φLm+1(n,r)和φFm(n,r),φFm+1(n,r)的数量;

(11)
式中:φLm(n,r),φLm+1(n,r)为在尺度因子τ下第k个粗粒化序列都要求解的局部矢量对的数量;φFm(n,r),φFm+1(n,r)为在尺度因子τ下第k个粗粒化序列都要求解的全局矢量对的数量。
由上式可以发现,在尺度因子为τ时,RCMFME能够获得τ个考虑局部特征的模糊熵值以及τ个考虑全局特征的模糊熵值,其不仅完成了信号的多尺度分析任务,而且能够全面描述信号的动态特性。
对于振动信号而言,当旋转机械的健康状态发生改变后,其故障频率、阻尼比、复杂度等关乎系统状态的动态特性均发生相应的改变。而对于RCMFME,笔者考虑了系统的局部和全局均值,从系统的全局和局部特性两方面出发,对系统进行了评估,RCMFME能够有效地提取这些信息。
对于RCMFME方法,其需要预先设置嵌入维数m、梯度n、相似容限r、尺度因子τ。根据ZHANG Zi-ying等人[12]5的研究,嵌入维数设置为m=2,梯度设置为n=2,相似容限设置为r=0.15。
为获得足够数量的特征,笔者将尺度因子设置为τ=5,此时能够获得10个特征。
2 天鹰优化器优化极限学习机
极限学习机是一种前馈单隐层神经网络,其输入层与隐含层之间的权重和阈值在设定后无需调整,且隐含层与输出层之间的权重是通过方程求解生成的,无需进行反复迭代。因此,极限学习机具有优异的泛化性能和分类效率,被广泛用于模式识别领域。
但ELM的输入层与隐含层之间的权重,以及隐含层神经元的阈值需要人为设定,这难以匹配所需的最优网络结构,有必要对其进行优化[19]。为此,笔者采用天鹰优化器对ELM的参数进行优化搜索。
2.1 天鹰优化器
天鹰优化器是一种通过模拟天鹰捕食行为而提出的智能优化算法,其包含捕食过程中的4个典型策略[20-21]。AO在摆脱局部最优、搜索全局最优方面优于其他算法。其具体步骤如下:
1)初始化参数,AO的种群定义如下:
Xij=R×(Bu-Bl)+Bl
i=1,2,…,N,j=1,2,…,D
(12)
式中:R∈[0,1];Bu,Bl,D分别为参量的上限、下限和维度;N为种群规模;
2)当t≤2/3T,R<0.5时,选择扩大搜索的策略,公式如下:
(13)
式中:t为已迭代的轮次;T为允许迭代的轮次;X(t+1)为第t+1次迭代的坐标;Xbest(t)为第t次迭代的最优坐标;XM(t)为第t次迭代相邻坐标的平均值;
3)当t≤2/3T,R≥0.5,选择减小搜索的策略,则有:
X(t+1)=Xbest(t)×Levy(D)+XR(t)+R(y-x)
(14)
式中:XR(t)为i次迭代的随机位置;Levy(D)为Levy分布函数;
4)当t>2/3T,R<0.5时,选择扩大开发的策略,公式如下:
X(t+1)=[Xbest(t)-XM(t)]×ε-R+
[(Bu-Bl)×R+Bl]×δ
(15)
5)当t>2/3T,R≥0.5时,选择减小开发的策略,公式如下:
X(t+1)=Q×Xbest(t)-[G1×X(t)×R]-
G2×Levy(D)+R×G1
(16)
式中:Q为平衡搜索方案的参数;G1为AO追踪猎物的各种运动;G2为AO初始位置到最佳位置的飞行角度;
6)若t=T,则输出此时的最优坐标;否则,返回步骤2)~步骤5)。
2.2 AO-ELM分类器模型
为了实现ELM的参数最优化目的,笔者采用AO对其参数进行搜索,利用适应度函数选择测试样本的识别错误率,当错误率最小时迭代结束。
AO优化ELM的流程如图1所示。

图1 AO-ELM的流程图
3 基于RCMFME和AO-SVM的诊断方法
3.1 故障诊断流程
为了有效诊断齿轮箱的不同故障,笔者提出了一种基于RCMFME和AO-ELM的齿轮箱故障诊断策略。该策略的具体执行步骤如下:
1)数据采集。利用振动传感器收集齿轮箱不同工况下的振动信号,采取长度为2 048的滑动窗口进行样本的截断;
2)特征提取。利用RCMFME提取振动样本的熵值特征,构造故障特征矩阵。
3)模型训练。利用AO算法对ELM的参数进行优化,并采用训练样本的故障特征矩阵对AO-ELM进行训练;
4)故障识别;将测试样本的故障特征矩阵输入至训练完备的AO-ELM模型进行识别,根据输出标签判断故障类型。
3.2 故障诊断实例
3.2.1 QPZZ-II故障诊断实验
为评估RCMFME和AO-ELM相结合的齿轮箱故障诊断策略的性能,笔者利用QPZZ-II型旋转机械综合故障模拟实验台,采集齿轮箱振动实验数据,进行分析。
模拟实验台如图2所示。

图2 QPZZ-II旋转机械故障模拟实验台
该实验平台主要由驱动电机、齿轮箱和制动器组成。齿轮箱中包含一个小齿轮和一个大齿轮,小齿轮为主动轮,大齿轮为从动轮,齿数分别为55和75,模数均为2。电机的转速为880 r/min,负载电流为0。
该实验模拟了齿轮的点蚀(Ds)、断齿(Dc)、磨损(Ms)、点蚀磨损(Dm)和健康(H)共5种状态。笔者利用布置在输入轴电机侧的振动加速度传感器,以5.12 kHz的频率采集齿轮箱在不同工况时的振动信号;利用长度为2 048的滑动窗口截取25组样本,任意挑选60%的样本进行训练,剩余40%的样本进行测试。
齿轮箱的振动信号如图3所示。

图3 齿轮箱振动信号的波形
由图3可以发现:振动信号的波形是一种没有明显规律的随时间变化的序列,无法直接通过观察来判断故障类型。
笔者利用RCMFME提取齿轮箱振动信号的故障特征。由于尺度因子设置为10,因此提取的故障特征分别包含5个反映振动信号局部特性的故障特征和5个反映振动信号全局特性的故障特征。
随后,为验证RCMFME方法在特征提取中的优越性,笔者利用精细复合多尺度全局模糊熵(RCMGFE)、精细复合多尺度模糊熵(RCMFME)和精细复合多尺度样本熵(RCMSE)进行对比分析。各方法的参数设置保持一致。
4种方法提取的熵值故障特征如图4所示。
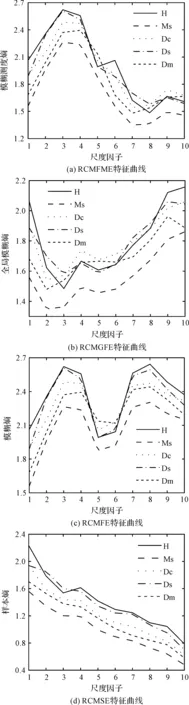
图4 齿轮箱振动信号的熵值特征曲线
由图4可知:4种方法的熵值特征曲线中,RCMSE能够较好地完成区分任务,熵值呈现出H>Ds>Dc>Dm>Ms,即健康样本的复杂度最大。这是因为健康样本的振动信号不包含固定频率的脉冲成分,其主要成分为随机的噪声等,不规则度较小,因此,复杂度较故障样本大。
RCMFME、RCMGFE和RCMFE这3种方法基本能够区分齿轮箱的不同故障样本,但熵值曲线不能完全表征区分度的优劣,还需要进行进一步的操作。
随后,笔者将故障特征输入至AO-ELM中进行训练和识别。
采用上述4种方法得到的AO-ELM故障识别结果如图5所示。
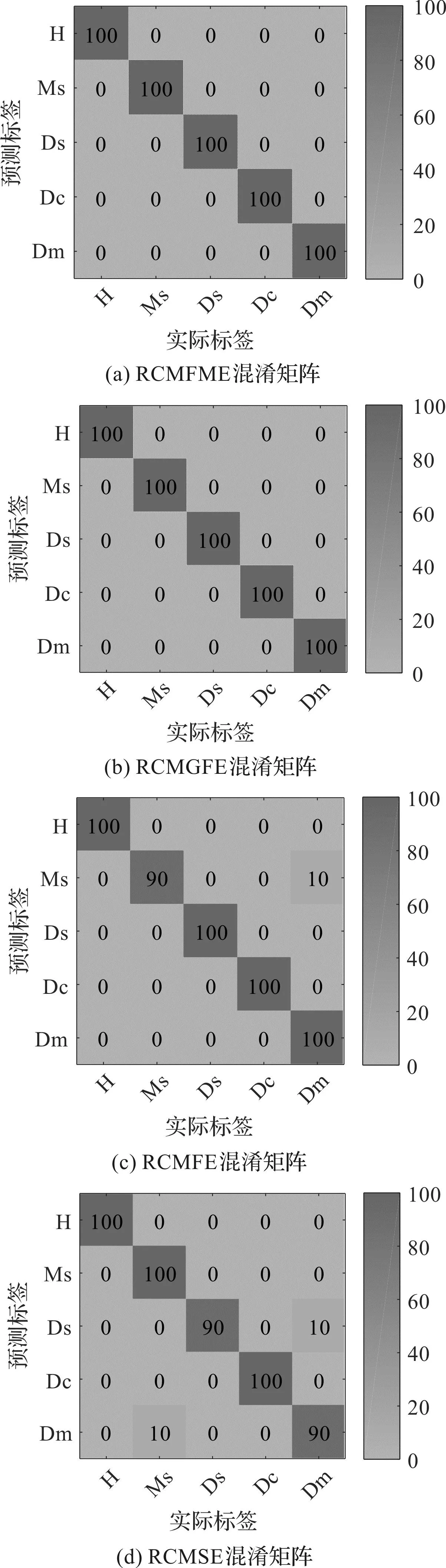
图5 4种方法的混淆矩阵
由图5可以发现:RCMFME和RCMGFE方法的识别准确率均为100%,证明这两种方法均可以有效识别齿轮箱的不同故障;而RCMFE和RCMSE方法的识别准确率分别为98%和96%,证明了RCMFME和RCMGFE在特征提取中的有效性和优越性。这主要是因为RCMFME和RCMGFE能够提取信号的全局特征,较为准确地表征样本的故障特征,实现了样本的精准识别目标。
从上述结果可以发现:RCMFME、RCMGFE方法的性能相近,且RCMFE和RCMSE方法的性能也与前两者相接近,因此无法确切评估4种方法的性能优劣。
为了验证4种方法的稳定性,笔者将4种方法提取的故障特征输入至AO-ELM分类器中进行20次试验,结果如表1所示。

表1 4种方法的20次试验结果
由表1可以发现:RCMFME和RCMGFE方法的准确率均为100%,表明这两种方法不仅拥有可观的特征提取性能,而且性能非常稳定。而RCMFE方法的平均准确率为98.1%,RCMSE方法的平均准确率为98.3%,且RCMFE和RCMSE方法的最低准确率均为96%,证明这两种方法在部分情况下会出现不可预料的错误识别样本,但总体上具有较为可靠的特征提取性能,且弱于RCMFME和RCMGFE方法。出现这种情况的原因是RCMFME和RCMGFE考虑了信号的全局特征,其能够获得更加全面的故障信息,从而准确地表征齿轮箱的不同故障。
随后,为了进一步验证RCMFME方法的性能,并评估特征数量对分类准确率的影响,以判断全局特征和局部特征数量对于特征质量的影响,笔者将RCMFME和RCMGFE的不同数量特征输入至AO-ELM模型进行故障识别,结果如图6所示。

图6 不同数量特征的识别准确率
由图6可以发现:当输入2个RCMFME特征时,RCMFME方法已经取得了100%的识别准确率,而RCMGFE只取得了98%的准确率。随着特征数量的增加,RCMFME方法的准确率一直保持在100%。而RCMGFE在特征数量为3时,准确率降低至94%,之后随着特征数量的增加,准确率也随之增加。
根据实验结果可以证明:由于综合了信号的局部和全局特征,RCMFME能够更加全面地表征样本的复杂度。因此,RCMFME方法要优于RCMGFE方法。
为了验证AO-ELM优于常规分类模型,笔者将其与遗传算法优化极限学习机(genetic algorithm optimized extreme learning machine,GA-ELM)、粒子群算法优化极限学习机(particle swarm optimization optimized extreme learning machine,PSO-ELM)、遗传算法优化支持向量机(genetic algorithm optimized support vector machine,GA-SVM)、粒子群算法优化支持向量机(particle swarm optimization optimized support vector machine,PSO-SVM)进行对比,将RCMFME故障特征输入至4种分类器进行故障的识别,结果如表2所示。
由表2可以发现:AO-ELM和PSO-SVM模型都取得了100%的识别准确率,但前者的分类时间只有1.08 s,小于后者的分类时间,因此,AO-ELM不仅具有较高的效率而且能够准确地识别齿轮箱的故障。
其他3种分类器的分类准确率都比AO-ELM分类器差,分类时间都大于AO-ELM用时。因此,AO优化ELM分类模型具有良好的性能。
3.2.2 东南大学故障诊断实验
笔者利用东南大学的齿轮箱振动数据进行实验验证[22],实验数据采集于某型动力传动系统。
齿轮箱振动实验测试平台如图7所示。
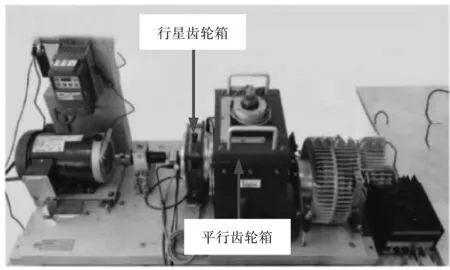
图7 齿轮箱振动实验测试平台
该实验平台包含两个齿轮箱,分别是行星齿轮箱和平行齿轮箱;振动加速度计布置在行星齿轮箱和平行齿轮箱的表面,以5 120 Hz的频率采集行星齿轮箱不同工况下的振动信号。齿轮箱的转速为20 Hz,负载为0 V;齿轮箱状态包含5种类型,分别是1种健康类型和4种故障类型。
每种故障类型的详细描述如表3所示。

表3 齿轮箱系统的故障类型
笔者利用长度为2 048的滑动窗口截取25组样本,任意挑选60%的样本进行训练,剩余40%的样本进行测试。
齿轮箱样本的振动信号如图8所示。
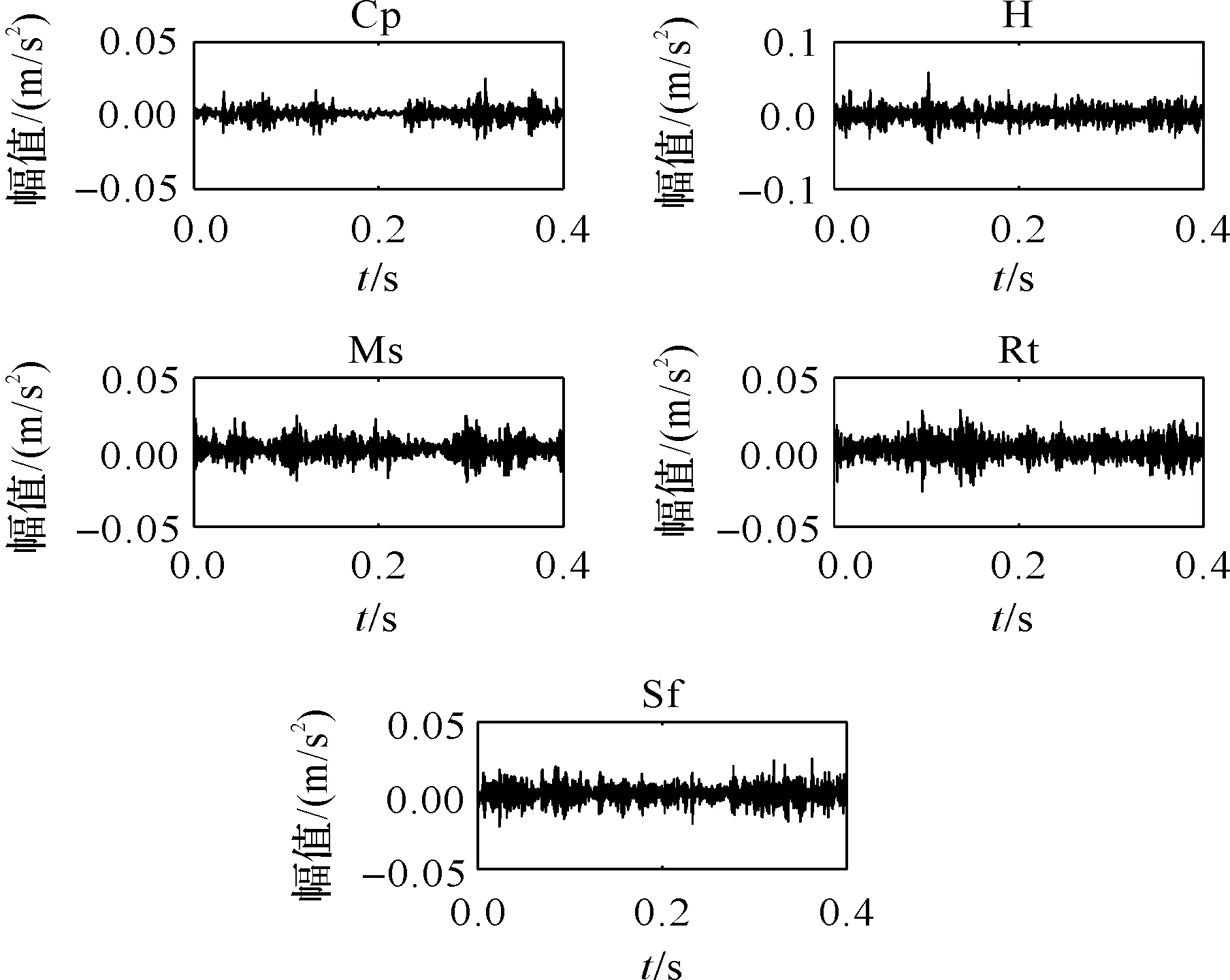
图8 齿轮箱振动信号的波形
由图8可以发现:振动信号的时域波形是一种包含冲击分量但杂乱、无规律的一维时间序列,无法直接根据波形对故障状态进行评估,需要对振动信号进行更有效的处理。
笔者采用RCMFME、RCMGFE、RCMFE和RCMSE提取齿轮箱振动信号的故障特征,结果如图9所示。

图9 齿轮箱振动信号的熵值特征曲线
由图9可以发现:4种方法的熵值特征曲线都具有一个明显的特点,健康样本的熵值普遍大于其他故障样本,这表明健康样本的振动信号比较随机,复杂性较大,也表明健康振动信号中的成分比较复杂。而对于RCMFME、RCMGFE和RCMFE方法,Cp样本的熵值最小,这说明当齿轮存在裂纹时,其在运行过程中会产生规律性较强的冲击成分。而在特征区分度方面,RCMFME优于RCMGFE方法,RCMFE的区分度最优。
为了进一步评估算法的性能优劣以及判断齿轮箱样本的故障状态,笔者将4种方法提取的故障特征输入至AO-ELM分类器进行故障识别,结果如表4所示。

表4 4种特征提取方法的AO-ELM故障识别结果
由表4可以发现:RCMFME方法的识别准确率为98%,而另外3种方法的识别准确率分别为94%、96%和90%,均低于RCMFME方法。上述结果证明该方法是具有优越性的,采用该方法能够有效地诊断齿轮箱的故障类型。
随后,笔者进一步开展了20次分类实验,结果如图10所示。
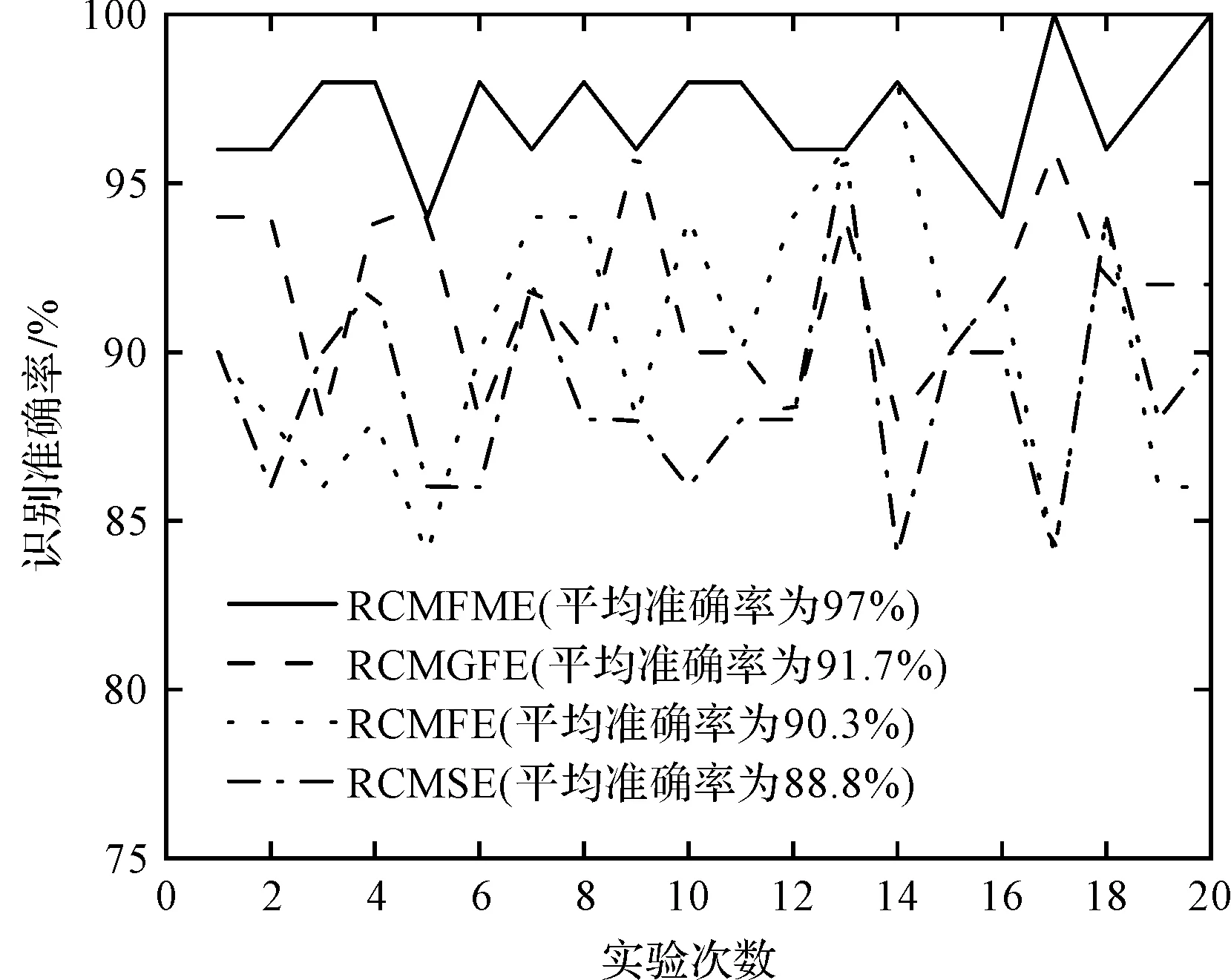
图10 4种方法的20次实验结果
由图10可以发现:RCMFME方法的平均准确率最高,而RCMSE方法的平均准确率最低,RCMGFE方法的准确率低于RCMFME,而高于RCMFE方法。这证明了考虑信号全局特征和局部特征要优于只考虑信号的单一特征,同时信号的全局特征相较于局部特征能够更加准确地反映信号的故障特征。
总之,RCMFME方法的特征提取性能优于另外3种方法。
最后,为了评估分类器的优劣,笔者将RCMFME故障特征输入至AO-ELM、GA-ELM、PSO-ELM、GA-SVM和PSO-SVM中进行识别,结果如表5所示。
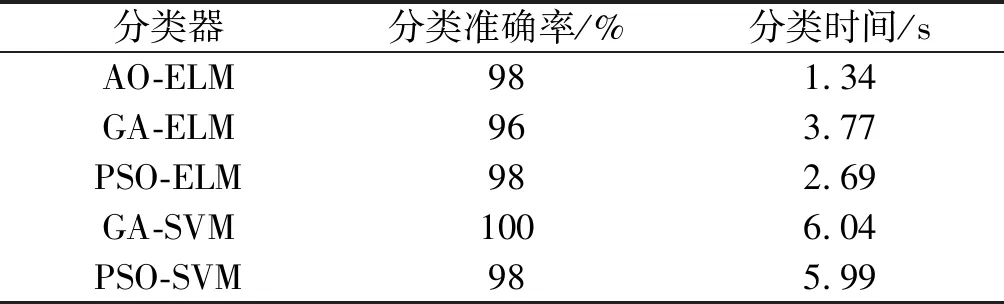
表5 不同分类器的故障识别结果
由表5可以发现:虽然AO-ELM的识别准确率只有98%,低于GA-SVM,与PSO-ELM和PSO-SVM相同,但其所有分类的时间最少。由此可见,AO-ELM在效率上优于其他3种分类器。
4 结束语
针对齿轮箱的故障识别精度不佳以及精细复合多尺度模糊熵仅考虑了信号局部特征的问题,笔者提出了一种基于RCMFME和AO-ELM的齿轮箱损伤识别策略,并利用两种齿轮箱振动数据集进行了实验,在识别准确率和识别稳定性方面,与相关的特征提取方法进行了对比分析。
研究结论如下:
1)RCMFME综合考虑了信号的局部和全局特征,能够全面地反映信号的故障特性,所提取的故障特征具有较高的质量;
2)RCMFME方法的识别精度分别为100%和98%,优于RCMFE和RCMSE方法;RCMFME方法的平均识别精度也要优于RCMFE和RCMSE方法。此外,RCMFME方法仅需2个特征即可以获得100%的识别精度,优于RCMGFE方法;
3)AO-ELM分类模型的识别准确率分别为100%、98%,分类时间分别为1.08 s、1.34 s,综合性能优于GA-ELM、PSO-ELM、GA-SVM和PSO-SVM,在处理故障识别问题中具有优越性。
目前,基于RCMFME和AO-ELM的齿轮箱故障诊断方法还存在受齿轮箱噪声影响的问题,导致其特征质量易于受到干扰。因此,在后续研究中,笔者将结合时频分析方法对此进行降噪处理。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
山东冶金(2022年3期)2022-07-19
数学物理学报(2022年2期)2022-04-26
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
金桥(2018年4期)2018-09-26
中国交通信息化(2018年5期)2018-08-21
制造技术与机床(2017年4期)2017-06-22
风能(2016年12期)2016-02-25
