一种基于约束规则的航天器全相位交会对接程序规划方法
2024-03-08 02:52可荣硕高宇辉周心婷王瑞玮
上海航天 2024年1期
姜 萍,可荣硕,高宇辉,周心婷,王瑞玮
(北京航天飞行控制中心,北京 100094)
0 引言
航天器交会对接技术是航天工程中的一项关键技术[1-3],中国载人航天工程空间站历次交会对接过程采用确定相位的自主快速交会对接模式,通过对目标航天器轨道控制,满足追踪航天器交会对接初始相位条件。随着交会对接技术的不断成熟[4],未来可能采用全相位自主交会对接模式[5-7]。在确定相位交会对接模式下,一般采用基于时序的飞行程序设计方法,对接相关飞控事件及程序安排在确定的时刻点和测控资源[8-11],根据各类正常、应急对接分支[12],需分别准备对应程序的“标称计划”配置。
对于全相位交会对接模式,受目标航天器轨道预报精度限制,预报时间越长,精度越低,对应的初始相位分支越多,由于对接圈次无法提前确定,如针对每个相位都设计独立的计划配置,则准备工作量巨大,且难以遍历各种对接情况。基于自主规划的程序设计方法[13-18],能够实现不依赖于测控资源的灵活规划[19-20]。
本文对载人航天器交会对接相关事件进行梳理[21],分析不同相位下事件的约束规则,建立飞控事件模型库,设计基于约束规则的飞控事件规划方法,实现任意交会对接模式、对接圈次及应急交会对接分支的飞行程序自动规划。
1 全相位自主交会对接
1.1 全相位自主交会对接
交会对接包含远距离自主导引段及近距离自主控制段[22],以6.5 h 快速交会对接为例,远距离自主导引段通过6 次调相及综合修正控制,将追踪航天器导引至远程制导终端,该过程总时长为确定值。
全相位自主交会对接过程,保留快速自主交会对接过程的远距离自主导引段及近距离自主控制段不变,在远距离自主导引段调相及综合修正控制前,增加大相位追及段,通过大相位追及过程,使两目标相位角满足快速交会对接调相与综合修正段入口条件,自主交会对接过程阶段如图1 所示。
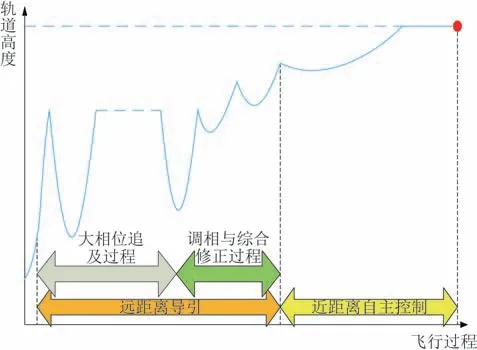
图1 全相位自主交会对接相对距离Fig.1 Relative distance diagram of all-phase autonomous rendezvous and docking
该模式下,追踪航天器发射时刻与目标航天器的相位角可以为0°~360°的任意值,因不同的相位角对应的大相位追及时间不确定,如采用在基于时序的程序设计方法进行程序指令规划时,在大相位追及过程时间确定前,指令安排时间无法确定,设计方法不灵活。
1.2 交会对接相关飞控事件
航天器交会对接过程,需要充分考虑光照、能源、两飞行器信息交互等约束条件,根据交会对接轨控策略、敏感器作用距离、控制精度、测控条件和飞行任务目标等要素进行指令计划的编排。按照阶段过程可分为目标航天器对接准备设置,追踪航天器发射入轨、远距离导引飞行、自主控制飞行、对接、组合体飞行。对各飞行阶段的事件按照相关性及约束情况,拆分成相对独立的飞控事件[23]。
2 约束规则设计
2.1 传统基于时序的设计方法
传统基于时序的设计方法如图2 所示,需针对所有正常及应急交会对接分支,人为确定交会对接各特征点时刻,并安排指令执行时刻,使指令被动满足约束条件,指令安排具有唯一性。该方法的优点是指令安排明确、状态可控;但当交会对接模式发生变化或指令存在冲突时,需要重新选择特征点或调整指令时间,程序适应性低。

图2 基于时序的设计流程Fig.2 Timing-based design process
2.2 基于约束规则的规划方法
基于约束规则的程序规划方法,首先将指令安排与绝对时间解耦,设计适应所有分支的通用约束规则进行描述,形成飞控事件级的约束规则库;并通过读取星历、距离、光照预报以及测控条件等已知信息,识别出事件安排的信息特征点;依据约束规则对飞控事件进行自动指令编排[24]。
针对全相位交会对接模式,对指令约束条件进行分析,整理约束规则,设计思路如图3 所示。
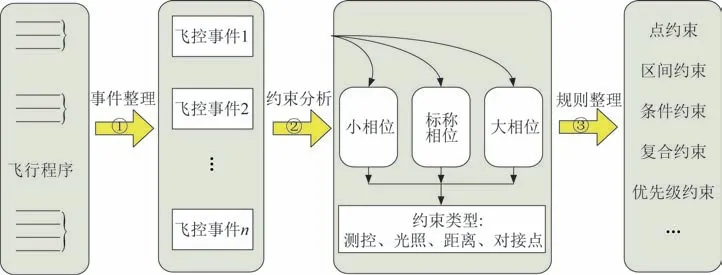
图3 全相位交会对接指令规则整理流程Fig.3 Processing flow of all-phase rendezvous and docking instruction rules
1)事件整理。将交会对接程序按照功能、相关性进行指令归类划分,相关功能或约束的指令归为同一飞控事件内。
2)约束分析。针对每个飞控事件,分析其在各正常应急分支下涉及的约束类型,约束类型能够覆盖不同相位的事件安排需求,并确认通过已知信息,是否能够自动提取约束特征点。
3)规则整理。将飞控事件对应的规则进行整理,形成约束规则库,对每个交会对接目标维护一套规则配置库。
3 规划体系设计
3.1 规划配置结构
采用基于约束规则的方式,通过一套规划配置,实现全相位交会对接的程序规划[25],规划配置结构如图4 所示,配置分为计划层、事件层、指令层,其中计划层描述全相位交会对接过程的所有正常、应急分支,通过自动识别或人工方式进行分支状态选择,并传递给事件层;事件层包含全相位交会对接过程涉及的全部飞控事件,并描述事件的约束设计及优先级设计,每个飞控事件包含不同的指令或指令组,按照计划层模式选择结果及选择对应的飞控事件,并调用指令层;指令层作为最小的程序单元,包含通用的指令或指令组,可根据飞控事件需求重复调用展开。
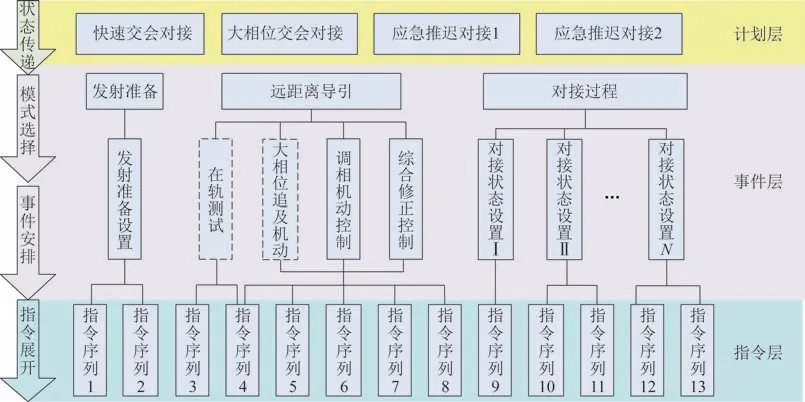
图4 全相位自主交会对接飞控事件的规划配置结构Fig.4 Planning configuration for flight control events by means of all-phase autonomous rendezvous and docking
3.2 规则类型及优先级
交会对接飞控事件的约束规则类型可以是特征点、基础区间或者应用区间。
1)特征点。通过已知信息自动获取的特征时间点a,例如变轨开机点。
2)基础区间。由2 个特征点形成的区间,如测控跟踪基础区间,由跟踪开始时刻a1、跟踪结束时刻a2确定,表示为b1(a1,a2)。
3)应用区间。由多个点或区间通过多重规则确定的约束区间,可以表示为c1(b1,b2,a3)。
基于规则的约束方式,使某个飞控事件在约束规则条件内,可能存在多组解,而2 个飞控事件的约束区间也可能存在交集。采用约束规则的优先级实现冲突消解,以飞控事件E1、E2、E3、E4为例,事件约束规则描述方式分别为
其中,事件优先级为E1>E3>E2>E4,事件安排及消解如图5 所示,首先安排高优先级飞控事件E1,飞控事件E3有3 个满足规则的约束区间,与事件E1冲突消解后安排在第2 个满足区间b2,事件E2最低优先级,规则区间与事件E3存在交集,在事件E3执行后,在约束区间b1内顺序安排。

图5 飞控事件规划Fig.5 Planning diagram for the flight control events
由于事件E4在该工况下没有满足约束规则,所以未进行安排。
3.3 飞控事件选择
对于全相位交会对接过程,除变轨控制、对接状态设置等必须安排的飞控事件外,还有些飞控事件仅在大相位工况下安排,或在应急工况安排,这些特定工况事件通过3 种方式实现:
1)约束规则
通过设计事件的约束规则,如能够规划出事件约束特征点或区间,则安排事件,以事件E4为例,其约束区间为b4(a4in,a4out1),其事件安排原则如下:
式中:T为事件持续时间。
2)状态传递
对飞控事件增加状态标识I,表示为I(S1,S2,S3,…,Sn)。其中Sn为全局信息元素,可以是在轨航天器实施遥测,或上一次规划结果,并存储在全局信息字段,在本次规划时,如飞控事件对应的状态标识结果为有效,则安排该飞控事件,全相位对接所有分支均安排的事件状态标识默认为有效。
3)手动选择
在规划配置计划层增加分支选项,并定义该分支下包含的飞控事件,这种方法主要针对无法通过状态获取,或约束规则代价高的特殊飞控事件,为简化事件配置规则的编写,通过人工定义的方式,提高配置可靠性。
4 结果验证
选取正常快速自主快速交会对接、含大相位的正常自主快速交会对接及应急对接3 个分支,对典型飞控事件进行测试,测试条件见表1。其中测控资源用An表示。
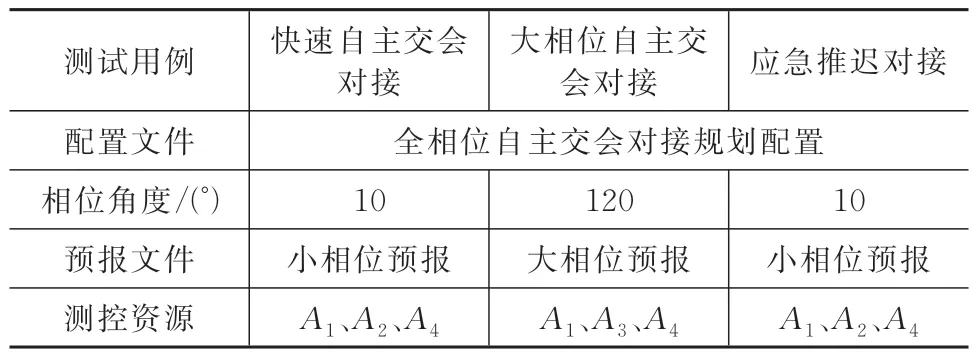
表1 全相位交会对接测试条件Tab.1 Conditions of all-phase rendezvous and docking tests
事件规划结果见表2,测试情况如下:

表2 全相位交会对接测试结果Tab.2 Results of all-phase rendezvous and docking tests
1)快速自主交会对接与大相位自主交会对接相比,“大相位机动控制”“在轨测试”事件能够按照分支模式进行选择输出;“程序注入”及“调相机动控制2”能够自动分配测控资源。
2)快速自主交会对接和应急推迟对接采用相同的预报及测控条件,“应急对接设置”通过手动选择进行安排,“对接状态设置”事件按照应急分支整体向后推迟。规划结果与预期一致。
5 结束语
本文介绍了一种基于约束规则的全相位交会对接规划设计方法,用一套规划配置实现全相位交会对接各类正常、应急过程的程序生成,该方法的核心是飞控事件约束的分析,配置设计综合考虑规则设计复杂性代价,对于少数特殊事件采用人工定义的方式,提高配置可靠性。相比于基于时序的设计方法,配置的适应性更强,程序生成效率更高,为后续交会对接过程规划设计提供参考。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23
国际太空(2022年7期)2022-08-16
国际太空(2019年9期)2019-10-23
民用飞机设计与研究(2019年2期)2019-08-05
当代水产(2019年1期)2019-05-16
国际太空(2018年12期)2019-01-28
电子测试(2018年23期)2018-12-29
国际太空(2018年9期)2018-10-18
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01