晶闸管和IGBT混合的三相电机两相变频控制策略
2024-03-05 12:13:12谢仕宏梁荣茂梁力
中南民族大学学报(自然科学版) 2024年2期
谢仕宏,梁荣茂,梁力
(陕西科技大学 电气与控制工程学院,西安 710021)
随着变频技术的发展,三相异步电动机有了优越的调速性能,被广泛应用于工业生产和交通运输中.在有着较高的调速性能的同时,现在也在追求更低成本、更小能耗、更小体积的变频装置.传统的电压源型交直交三相六开关变频器已经广泛应用在三相异步电动机的调速过程中,利用IGBT的特点传统拓扑结构能够满足大部分情况下的调速要求.基于此经典拓扑结构,进一步衍生出了减少IGBT的使用数量的三相四开关拓扑结构.在文献[1]中分析了三相四开关的可行性,验证了两相变频对于三相异步电动机具有可行性.但三相四开关拓扑结构仍需要四个IGBT 进行两相逆变.改进的DTC 控制策略在一定程度上减少了电机的转矩脉动以及降低了逆变器输出的电流谐波[2-4].在文献[5]和文献[6]中提出了一种变频器和感应电机能量回馈的思路,基于传统交直交三相六开关变频拓扑结构进行了仿真和实验验证.在文献[7]中提出了一种基于叠加原理合成所需矢量的PWM 过调制策略,使得三相四开关逆变器输出平衡的三相电压.在文献[8]中提出了一种基于晶闸管和IGBT的三相整流和逆变的拓扑结构,验证了该结构的可行性.
在文献[9]中提出了一种通过并联逆变器提高电能质量的新方法,实现了在弱电网环境下对电能质量的治理.直接转矩控制策略应用于多相电机有了更多思路,结合新的开关表、虚拟电压矢量和预测控制策略,使得转矩脉动有效的减少[10-12].在文献[13-15]中依次提到了,三相四开关新的应用方向即用户侧的容错应用、无速度传感器的DTC 控制和DTC 结合智能控制算法的策略.在文献[16]中在传统三相四开关拓扑上提出了一种新的FCS-MPC 控制策略,为四开关在容错领域应用提供了一种新的思路.在原有拓扑电路上进行控制算法的改进,可以使传统控制策略得到优化,进而提升电机的工作性能[17-20].
本文提出一种新的交直交电压型变频电路拓扑结构.采用4 个晶闸管、2 个IGBT 及8 个二极管构成的逆变结构代替由4 个IGBT 的构成的逆变结构.对该新式的交直交变频电路拓扑的原理、拓扑结构、带负载时的能量回馈、IGBT 和晶闸管的开关时序等进行了研究分析,建立了基于八电压矢量的直接转矩仿真模型.仿真结果表明,该新拓扑结构实现了传统四开关逆变电路的功能,也验证了八电压矢量在新拓扑的可行性.
1 三相电机两相变频电路结构及工作原理
基于晶闸管及IGBT 混合的三相电机两相变频控制拓扑结构如图1 所示.图1 所示的三相电机两相交直交变频电路结构由晶闸管(VT1~VT4)、绝缘栅型双极性晶体管(IGBT1和IGBT2)和二极管(D1~D8)组成.电机U、V 相与逆变桥臂连接,电机W 相绕组与电容中性点相连.当VT1、IGBT1和D4导通时,电流由直流母线正极流入电机U 相,D2、D4为其续流回路.当D3、IGBT1和VT2导通时,电流由电机U 相流出,流入直流母线负极,D1、D3为其续流回路.电机V相绕组导通原理与电机U绕组导通原理相同.
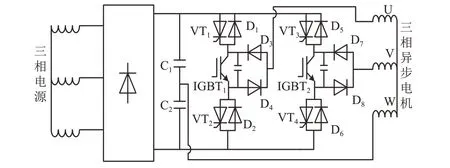
图1 基于晶闸管及IGBT混合的三相电机两相变频控制拓扑结构Fig.1 Topology of two-phase frequency conversion control of threephase motor based on thyristor and IGBT mixture
1.1 新拓扑逆变部分能量传输模式
晶闸管和IGBT 混合的四开关交直交变频电路经过不控整流之后,经过逆变部分实现输出两相互差60°的交流电压.通过两个晶闸管共用一个IGBT实现开关器件完全可控即晶闸管开通时对应IGBT一定开通.图2 所示为三相电机两相变频电路在不同开关组合下的能量传输模式.
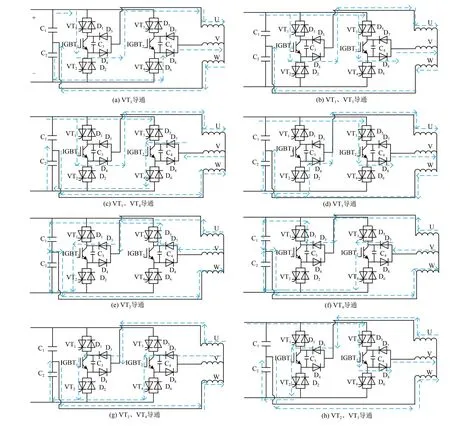
图2 新四开关拓扑逆变部分的能量传输模式Fig. 2 Energy transfer mode of the inverting part of the new four-switch topology
(1)图1 所示电路的晶闸管VT1开通,此时能量传输方向为:电容C1正端—VT1—IGBT1—D4—异步电机U 相,电容C1负端—D6—D8—异步电机V 相,或者异步电机V 相—D8—D6—电容C1负端,异步电机W相—两电容中点.能量传输如图2(a)所示.
(2)图1 所示电路的晶闸管VT1、VT3开通,此时能量传输方向为:电容C1正端—VT1—IGBT1—D4—异步电机U 相,电容C1正端—VT3—IGBT2—D8—异步电机V 相,异步电机W 相—两电容中点.能量传输如图2(b)所示.
(3)图1 所示电路的晶闸管VT1、VT4开通,此时能量传输方向为:电容C1正端—VT1—IGBT1—D4—异步电机U 相,异步电机V 相—D7—IGBT2—VT4—电容C2负端,两电容中点—异步电机W 相.能量传输如图2(c)所示.
(4)图1 所示电路的晶闸管VT3开通,此时能量传输方向为:UDC+—VT3—IGBT2—D8—异步电机V相,电容C2正端—D2—D4—异步电机U 相,异步电机W相—两电容中点.能量传输如图2(d)所示.
(5)图1 所示电路的晶闸管VT2开通,此时能量传输方向为:异步电机U 相—D3—IGBT1—VT2—电容C2负端,异步电机V相—D7—D5—电容C1正端,两电容中点—异步电机W相.能量传输如图2(e)所示.
(6)图1 所示电路的晶闸管VT4开通,此时能量传输方向为:异步电机U 相—D3—D1—UDC+,异步电机V 相—D7—IGBT2—VT4—电容C2负端,两电容中点—异步电机W相.能量传输如图2(f)所示.
(7)图1 所示电路的晶闸管VT2、VT4开通,此时能量传输方向为:异步电机U相—D3—IGBT1—VT2—电容C2负端,异步电机V 相—D7—IGBT2—VT4—电容C2负端,两电容中点—异步电机W 相.能量传输如图2(g)所示.
(8)图1 所示电路的晶闸管VT2、VT3开通,此时能量传输方向为:异步电机U相—D3—IGBT1—VT2—电容C2负端,UDC+—VT3—IGBT2—D8—异步电机V相,两电容中点—异步电机W 相.能量传输如图2(h)所示.
1.2 新拓扑逆变部分开关状态
通过分析图2的能量传输状态,可以推导出表1所示三相电机两相变频电路的开关时序和开关状态表.图3 为晶闸管VT1~VT4及IGBT1和IGBT2的开关时序图.规定四个晶闸管VT1~VT4导通时为1,关断时为0.建立表1所示的新型交直交变频器逆变部分的开关状态表.其中有八个有效电压矢量分别为(1000)、(1010)、(0010)、(0110)、(0100)、(0101)、(0001)和(1001),根据这八个电压矢量画出矢量图如图4 所示.在晶闸管导通的半个周期内,对应IGBT采用PWM调整,以减小输出电压谐波分量.

表1 新型交直交变频器逆变部分的开关状态表Tab. 1 Switch state of the inverter part of the new AC-DC-AC converter
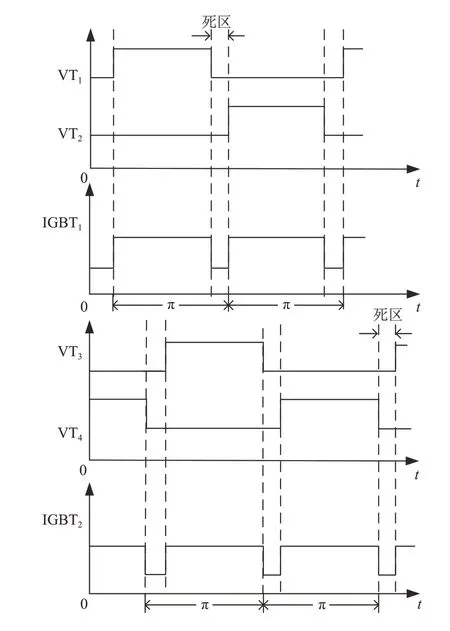
图3 新拓扑逆变部分的开关时序Fig. 3 Switching sequence of the inverting part of the new topology
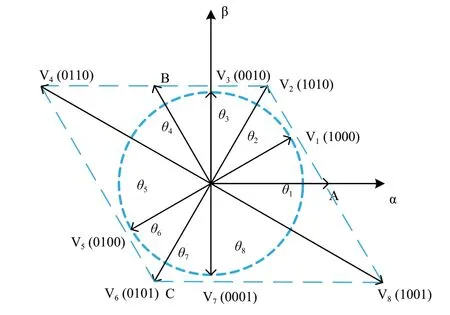
图4 八电压矢量图Fig. 4 Eight-voltage vector diagram
2 基于八电压矢量的直接转矩控制策略
四开关两相直接转矩控制是将一相从直流母线两电容中点引出、将电压和电流进行坐标变换和分析得到八电压矢量表.根据文献[21]中的方法结合拓扑结构得出虽然同样需要6 个驱动信号,但其中两个信号来源于同桥信号变换,即有4个有效驱动信号即可.在晶闸管和IGBT配合时要前者先于后者关断且需要考虑晶闸管的关断时间.拓扑电路在IGBT旁并联一电容,在电容的充放电时辅助晶闸管的关断.
三相电机四开关八矢量两相直接转矩控制原理框图如图5所示.
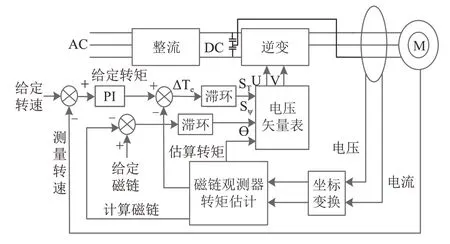
图5 四开关八矢量两相直接转矩控制原理框图Fig. 5 Block diagram of four-switch eight-vector two-phase direct torque control
2.1 扇区划分
根据以上论述可知,此拓扑的电压空间矢量为8 个,且对应的幅值不同,同时也是关于V4V8向量对称的.这种模式下8 个固有电压矢量对复平面进行划分而形成8 个扇区,各扇区占据的角度存在差异性且可以分为两类60°扇区和120°扇区.根据此结果可推断出该四开关逆变器的矢量控制模式下,扇区划分不均匀且矢量幅值不一致,导致选择过程变得很繁琐.在直接转矩控制下可能会导致转矩脉动加剧,则应在矢量选择时考虑尽量不要选择使转矩幅值剧烈变化的电压矢量.八矢量扇区分布如图4所示.
2.2 电压矢量选择
电压矢量选择单元通过滞环调节单元得到的磁链调节指令ψQ和转矩调节指令TQ,及当前磁链所在扇区θ(k),设置电压矢量选择表,在此基础上选择适宜的开关信号对逆变器进行控制.由于使用八电压矢量会存在可以选择多个电压矢量的情况,且由于存在120°的扇区会存在位于某个中间角度时为矢量选择的分界线,使前后选择的矢量不尽相同.此时应该列出可能的矢量,在接下来的仿真中进一步选择最合适的电压矢量[22-23].在具体选择时应该避免选择使磁链和转矩变换过大的电压矢量.
在此研究过程中以θ(1)扇区为例,并假设磁链逆时针旋转,则:
当ψQ=1,TQ=1,需增加定子磁链,增加电磁转矩,选用电压矢量V1;
当ψQ=1,TQ=0,需增加定子磁链,减小电磁转矩,选用电压矢量V8;
当ψQ=0,TQ=1,需减小定子磁链,增加电磁转矩,选用电压矢量V4;
当ψQ=0,TQ=0,需减小定子磁链,减小电磁转矩,选用电压矢量V6;
其他扇区同理,则可得出三相电机两相直接转矩控制的电压矢量选择表如表2所示.
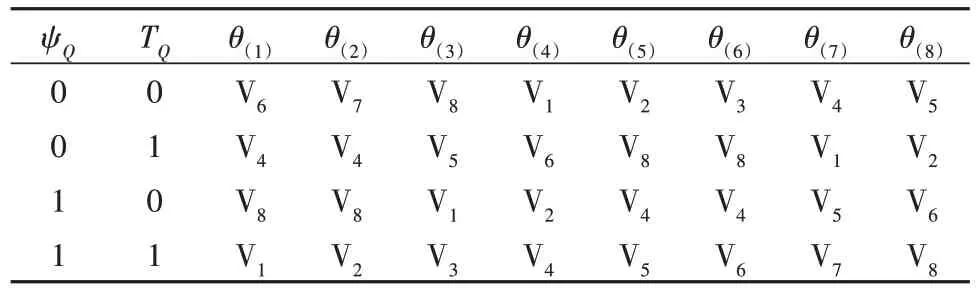
表2 扇区的电压矢量选择表Tab. 2 Voltage vector selection table of sector
2.3 八电压矢量基本原理
由图4 八矢量磁链扇区分布图为例,可知八矢量可以分成8个扇区.以第一扇区和第三扇区为例,假设参考电压矢量Vr 的相角分别为θ1和θ2.因为有开路零电压矢量(即开关管全部关断时的电压矢量),则根据伏秒平衡原理则有下面的等式.
第一扇区V1和V8为例,矢量合成图6所示.

图6 V1和V8期望输出电压矢量合成图Fig. 6 Resultant of expected output voltage vectors for V1 and V8
其中电压矢量设为:
代入后联立可得:
第三扇区V2和V3为例,矢量合成图7所示.
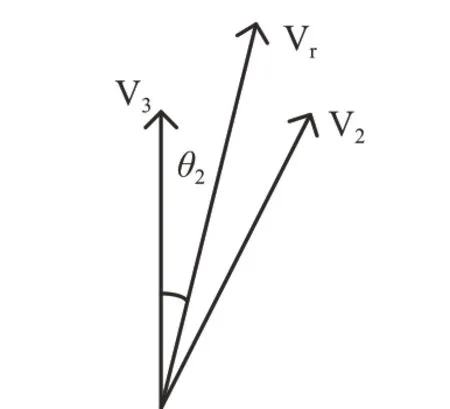
图7 V2和V3期望输出电压矢量合成图Fig. 7 Synthesis of expected output voltage vectors for V2 and V3
同理可得:
3 仿真研究
基于上述分析和对传统三相四开关逆变器的理论研究,建立交直交电压型变频器的逆变器-异步电机驱动系统仿真模型.仿真模型中异步电机参数(取自MATLAB 电机模块库4kW 电机预设值):转子类型:鼠笼式,PN=4 kW,UN=400 V,fN=50 Hz,Rs=1.405 Ω,ls=0.005839 h,Rr=1.395 Ω,lr=0.005839 h,Lm=0.1722 h;根据三相四开关直流侧电压利用率为0.5,取直流母线电压VDC=800 V;电机初始转速设定值700 r/min,在0.5 秒时增大至1000 r/min,初始负载转矩为空载,在0.3 秒增大至26.7 N·m.异步电机转速响应如图8所示.

图8 异步电机输出转速波形图Fig. 8 Output speed waveform of asynchronous motor
在图8 和图9 的异步电机转速和转矩图可以看出,在新拓扑结构下,应用八电压矢量直接转矩控制策略可以正常启动成功,基本达到了给定转速和预期转矩.在图10 三相电流图中通过MATLAB 示波器模块的测量单元测得:0.1-0.3 s 电流频率约为25 Hz,0.3-0.5 s 电流频率约为30 Hz,0.6-0.8 s 电流频率约为50 Hz.通过仿真进一步验证了新拓扑应用DTC 策略的可行性,亦验证了新拓扑在异步电机调频领域的可行性.

图9 异步电机输出转矩图Fig. 9 Output torque diagram of asynchronous motor
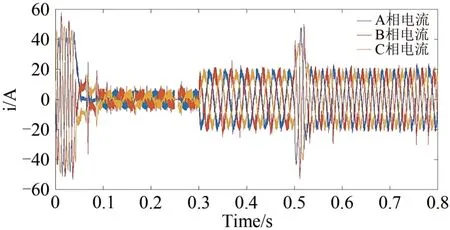
图10 变频电路逆变部分输出电流波形图Fig.10 Output current waveform of inverter part of inverter circuit
通过观察分析可知输出驱动脉冲与开关时序分析时一致.异步电机转矩波形如图9 所示,在0~0.05 s 时间段内电机转矩迅速上升,启动转矩波动较大,从0.1 s 开始电动机逐渐完成启动过程并趋于平稳运行,此后转矩在一定范围内有着周期性波动.根据图11 和图12 异步电动机磁链幅值和轨迹图可以看到幅值基本平稳和磁链轨迹基本为圆形磁链.通过对图13 和14 观察分析可知输出驱动脉冲与开关时序分析时一致,达到了预期开关时序目标.
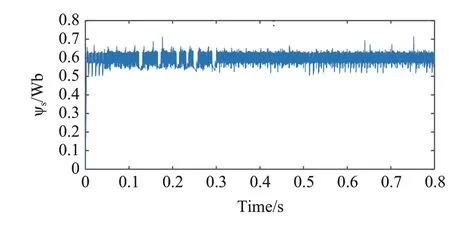
图11 定子磁链幅值波形图Fig. 11 Waveform of stator flux amplitude
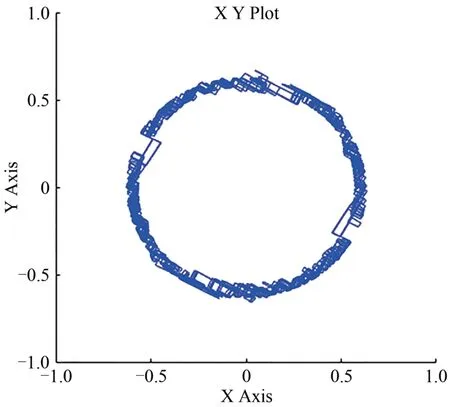
图12 定子磁链轨迹图Fig. 12 Stator flux locus
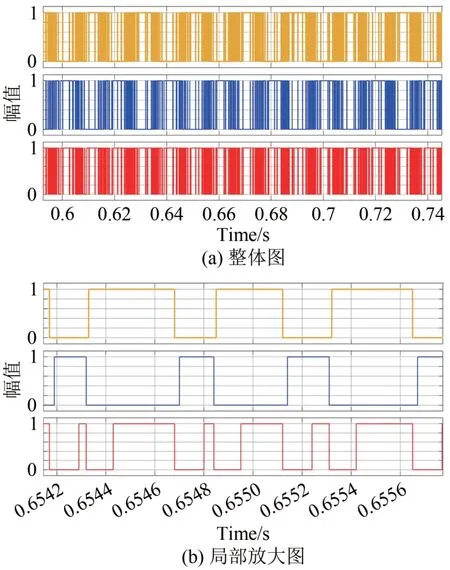
图13 VT1、VT2和IGBT1驱动脉冲图(电机转速1000 n/min)Fig. 13 VT1、VT2 and IGBT1 drive pulse (motor speed 1000 n/min)
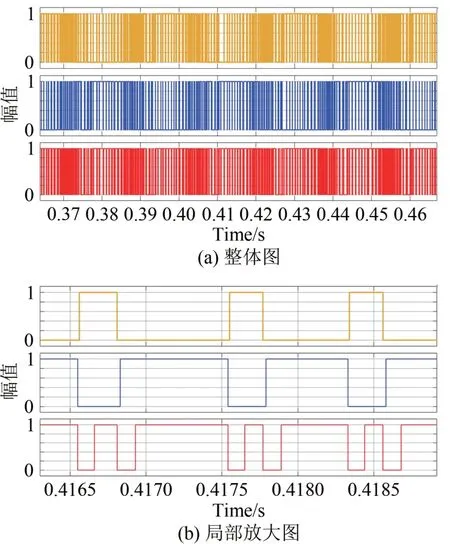
图14 VT1、VT2和IGBT1驱动脉冲图(电机转速700 n/min)Fig. 14 VT1、VT2 and IGBT1 drive pulse diagram(motor speed 700 n/min)
总的来说,在晶闸管和IGBT混合的三相四开关的拓扑电路上应用新的基于八电压矢量的DTC 策略,具有较高的转矩响应速度和较低的转矩脉动.
4 结论
本文采用4 个晶闸管、2 个IGBT 和8 个二极管,提出一种新的交直交变频器拓扑结构和八电压矢量的控制策略,对比分析了传统四开关逆变器四电压矢量控制方法和采用新型拓扑结构的逆变器八电压矢量控制方法,研究了新的交直交变频器拓扑结构的能量传输模式、开关状态、电压矢量的作用时间及八电压矢量的直接转矩控制原理.在此基础上,搭建仿真模型进行仿真分析,仿真结果验证了本文所提新型拓扑结构和控制策略的可行性,从而有效降低了设备成本.
猜你喜欢
现代信息科技(2022年20期)2022-11-17 07:50:20
南北桥(2022年2期)2022-05-31 04:28:07
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
东北电力大学学报(2015年1期)2015-11-13 05:21:26
电子设计工程(2015年12期)2015-02-27 12:06:22
电测与仪表(2014年20期)2014-04-04 11:57:58