黄陵二矿辅运巷快速掘进系统装备研究
2024-03-05 01:45张宏升高文博马晓博鲍银辉
陕西煤炭 2024年3期
张宏升,高文博,马晓博,鲍银辉
(陕西黄陵二号煤矿有限公司,陕西 延安 727307)
0 引言
随着煤矿巷道掘进机械化程度的提高,锚杆、锚网支护速度难以适应快速掘进,这在一定程度上制约着煤矿巷道掘进速度[1-2]。常用的掘进与支护组合方式有连续采煤机配锚杆钻机、掘进机配单体锚杆钻机、掘锚一体机等[3-4]。
目前煤矿井下巷道掘进常常受到高地应力的影响,加上机械掘进的影响,巷道围岩完整性较差[5-6]。在这种情况下,使用连续采煤机配锚杆钻机时,通常需要采取短掘短支的支护模式,限制了掘进速度[7-8];使用掘进机配单体锚杆钻机时,辅助作业难度较大、机械化程度低、掘进速度较慢[9-10]。锚掘一体机掘进、支护的自动化水平较高,在开挖完成后无需后退,就能完成围岩支护,对于地质条件的适应性较强[11-14]。黄陵煤矿215辅运巷掘进范围内地质条件比较复杂,围岩破碎区域较多,在巷道掘进过程中采用基于智能控制的掘锚一体机,实现了巷道的快速掘进与支护,且降低了工人工作量,提高了掘进安全性。
1 巷道概况
黄陵煤矿215辅运巷煤层厚度2.7~3.6 m,平均厚度为3.0 m。煤层结构简单,含0~3层夹矸,煤层倾角0°~4°,平均倾角2°。煤层顶底板情况见表1。巷道掘进工作面为矩形设计,掘宽4.6 m,掘高3.8 m,面积17.48 m2。已有地质材料及邻近回采面揭露显示,215辅运巷掘进区域内存在多处断层,且围岩较为松软、破碎,巷道掘进时容易出现片帮、围岩变形量大等问题,煤层顶底板情况见表1。

表1 煤层顶底板情况
2 快速掘进系统
快速掘进系统如图1所示。适应巷道宽度不小于5.2 m。适应巷道高度不小于3.8 m。胶带搭接行程约为20 m。系统总长约为100 m。电压等级为1 140 V。该系统实现了掘进工作面掘进、支护、运输全工序机械化连续作业;皮带输送机拉移次数降低,实现了巷道掘进快速推进。有助于增强巷道粉尘综合治理,改善作业环境。智能化技术助推综掘工作面实现安全、减人、增效掘进。

图1 快速掘进系统Fig.1 Rapid tunneling system
配套设备包括EBZ260M-2掘锚机,作用是完成巷道掘进、出料及顶锚杆的支护;CMM5-30Y跨骑式锚杆钻车,作用是完成滞后锚杆、锚索的补强支护;可弯曲皮带转载机,作用是与迈步自移机尾重合搭接,保障连续掘进;DWZY800/1200迈步自移机尾,作用是机尾可自移,自动延伸带式转载机;干式除尘系统(选配),作用是控制及处理工作面粉尘;智能控制系统,作用是对系统装备进行系统控制、远程监控。
2.1 EBZ260M-2掘锚机
掘锚机如图2所示。掘锚机的长×宽×高为14.0 m×3.4 m×2.1 m;铲板宽度为3.6 m;截割功率为260 kW;履带板宽度为650 mm;可截割硬度不大于90 MPa;机载锚杆钻机2台;机重100 t;钻机最大转矩为315 N·m;定位可掘最大高度5.0 m;钻箱额定转速为600 rpm;定位可掘最大宽度为6.1 m;钻箱最大进给长度为1 820 mm。
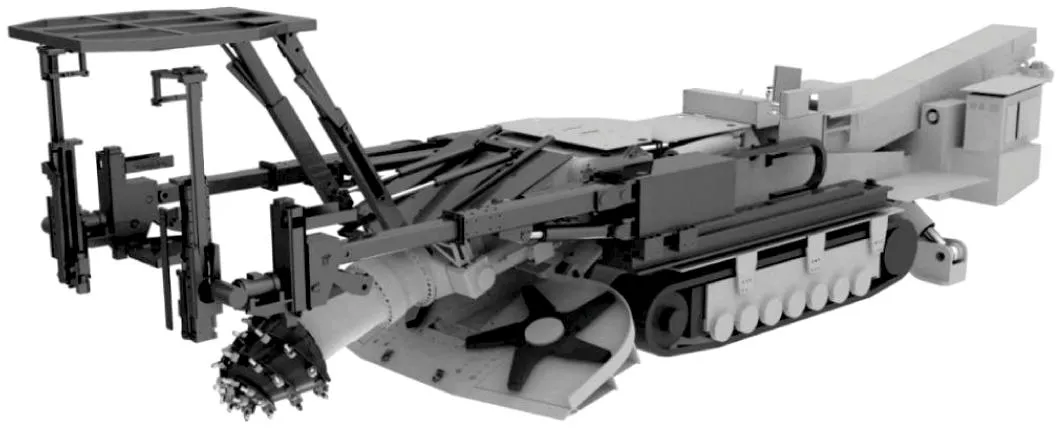
图2 EBZ260M-2掘锚机Fig.2 EBZ260M-2 excavating and anchoring machine
掘锚机特点:机身两侧为钻机系统,机身上方为操作台。锚杆钻机系统轨道为整体铸造式。通过电液遥控控制锚杆钻机系统,适应不同状况巷道全断面支护。通过机械化作业完成锚杆、锚索支护,增加临时支护装置,提高人员作业安全、降低劳动强度,避免打孔时人员淋水,降低噪音,改善人员作业环境。
2.2 CMM5-30Y跨骑式锚杆钻车
钻车如图3所示。适应巷道宽度范围为5 300~6 900 mm;适应巷道高度范围为3 500~5 500 mm;行走方式为履带行走;行走速度范围为0~10 m/min;爬坡能力范围为±10°;接地比压为0.15 MPa;钻臂数量为5个;钻箱最大扭矩为310 N·m;除尘方式为湿式;电气系统电压1 140 V;煤矿用锚杆钻车采用跨骑式结构,履带行走,可弯曲皮带机从钻车下方穿过;各个钻臂独立平行作业,可同时进行顶板和侧帮支护,支护效率高;紧凑型、模块化跨骑式机身结构;复杂机身结构条件下除尘风道集成。
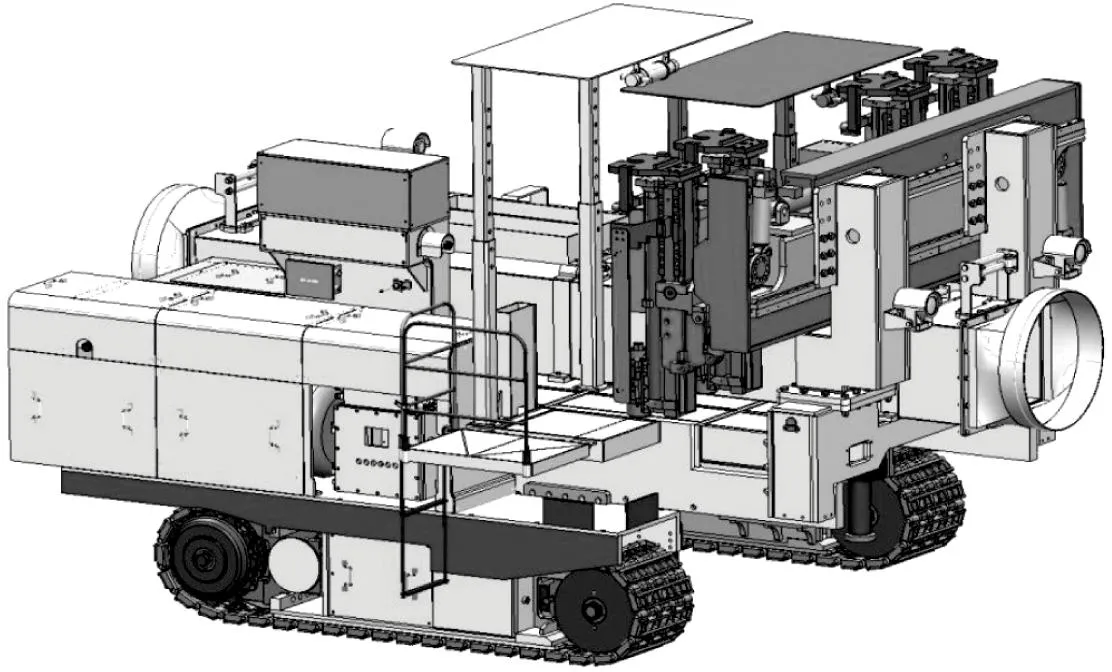
图3 CMM5-30Y跨骑式锚杆钻车Fig.3 CMM5-30Y straddling anchor rod drilling vehicle
2.3 可弯曲皮带转载机
转载机运输距离约为54 m;胶带宽度为1 000 mm;驱动功率为2×45 kW;运输能力最大为1 600 t/h;带速范围为0~4 m/s;胶带张紧行程为1 800 mm;胶带张紧方式为液压油缸自动张紧;水平最小可弯半径为10 m;驱动形式为电动滚筒;调速方式为变频调速;可实现移动式的弯曲运输,移动采用被动牵引,皮带架下方布置胶轮和独立的油气悬挂机构;动力站通过液压马达+减速器+销齿销排机构在迈步刚性架上行走,可拖动可弯曲胶带转载机后退;动力站的操作带遥控功能,动力站的移动和胶带的启停可遥控操作。
2.4 DWZY800/1200迈步自移机尾
自移机尾如图4所示。装机功率为55 kW;外形尺寸为21 290 mm×2 290 mm×835 mm;整机重量约为22 t;供电电压为1 140/660 V;移动方式为无反复撑顶自移式;适应带宽为800 mm;运输能力为800 t/h;搭接行程为10 m、14 m、17 m、20 m;推移行程为1 200 mm;侧移油缸行程为120 mm;抬升行程为250 mm;适应变坡角度小于<8°;自带动力源,可自适应巷道的起伏变化;无需退机拉移、打地锚,可实现机身自移;无需反复撑顶即可实现整机的抬升、推移、调偏;可布置移变、电缆车、材料车等,减少辅助设备拖移工序;可实现远程遥控操作。
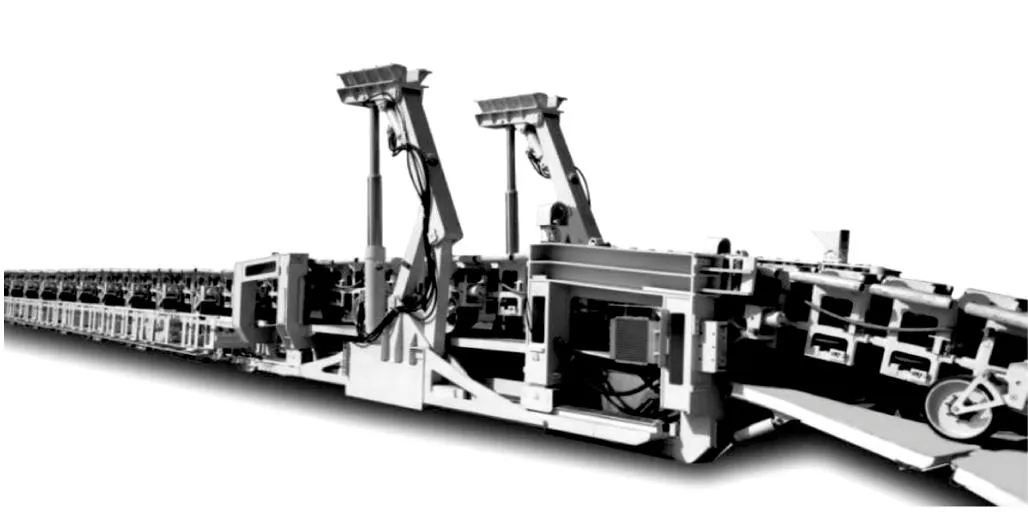
图4 DWZY800/1200迈步自移机尾Fig.4 DWZY800/1200 walking self-moving machine tail
2.5 干式除尘系统
干式除尘系统如图5所示。处理风量为600 m3/min(偏差不超过8%);适应巷道面积不大于24 m2;电压为660/1 140 V;风机电机功率为2×55 kW;排灰电机功率为0.75 kW;外形尺寸(含风机)不大于12.0 m×1.4 m×1.2 m;总粉尘除尘效率不小于99.5%;呼吸性粉尘除尘效率不小于99%;滤袋形式为旁插扁框滤袋;压缩空气消耗量不大于3.5 m3/min;压缩空气压力不大于0.45 MPa;整机质量不大于6 700 kg。

图5 干式除尘系统Fig.5 Dry dust-removing system
干式除尘风机类型为扁框滤袋式干式除尘风机,滤布类型为扁框无龙骨。滤布采用旁插结构,滤布在设备一侧进行拆装,方便现场维护。清灰方式为采用时序式的全自动连续清灰,无需人工操作。
2.6 智能控制系统
智能控制系统有6大功能:①本机、视距、超视距、地面控制;②边界标定、记忆切割;③工作人员安全管控;④工况监测、故障诊断;⑤惯性导航系统;⑥集中供电、时频监控。
实现掘进机、转载机和自移机尾一键远程智能控制,掘进机和自移机尾控制相互闭锁。除了能适应矩形、梯形、拱形等规则巷道,还可以根据巷道实际情况进行不规则形状记忆切割。具体操作方法是工作人员使用遥控器和上位机按照所需形状进行切割示教,然后存储该示教的切割路径与控制工艺,不断循环该示教完成巷道标准化掘进。
使用超带宽定位技术计算机器与机器、机器与工人之间的距离;通过红外防入侵技术识别未佩戴标识卡进入工作面的人员,并进行安全预警与自动保护停机;报警范围最大可达到100 m,报警方式有机器声光报警、标识卡语音报警、标识卡震动报警3种;每台设备布置1台基站,实时定位误差小,精度可达30 cm;可以设置不同种类标识卡,并规定部分标识卡具有免报警特殊权限,例如驾驶员在本机危险区域内免除报警。远程监视系统如图6所示。
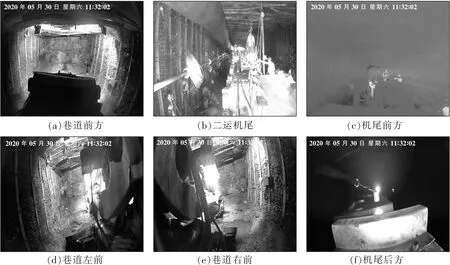
图6 远程监视系统Fig.6 Remote monitoring system
自移机尾机载组合开关,可实现对工作面成套设备集中供电、远程停送电、远程数据传输且可搭载机尾报警装置、红外传感器和机尾摄像头。视频监控,即工作面组合视频监控,具有抓拍、录像、回放、存储、拷贝和视频识别等功能。
3 现场应用
掘锚一体化技术实施后巷道进尺的变化见表2。应用初期因作业不熟练,巷道月掘进进尺达192~321 m;后期随作业的继续深入,巷道掘进进尺基本稳定在300 m左右,提高了掘进效率和围岩支护效率。基于智能控制的掘锚一体机和普通综掘机进尺数据如图7所示。基于智能控制的掘锚一体机能够更快、更好的掘进巷道并进行围岩支护,日平均进尺相比于普通综掘机增加1倍多。
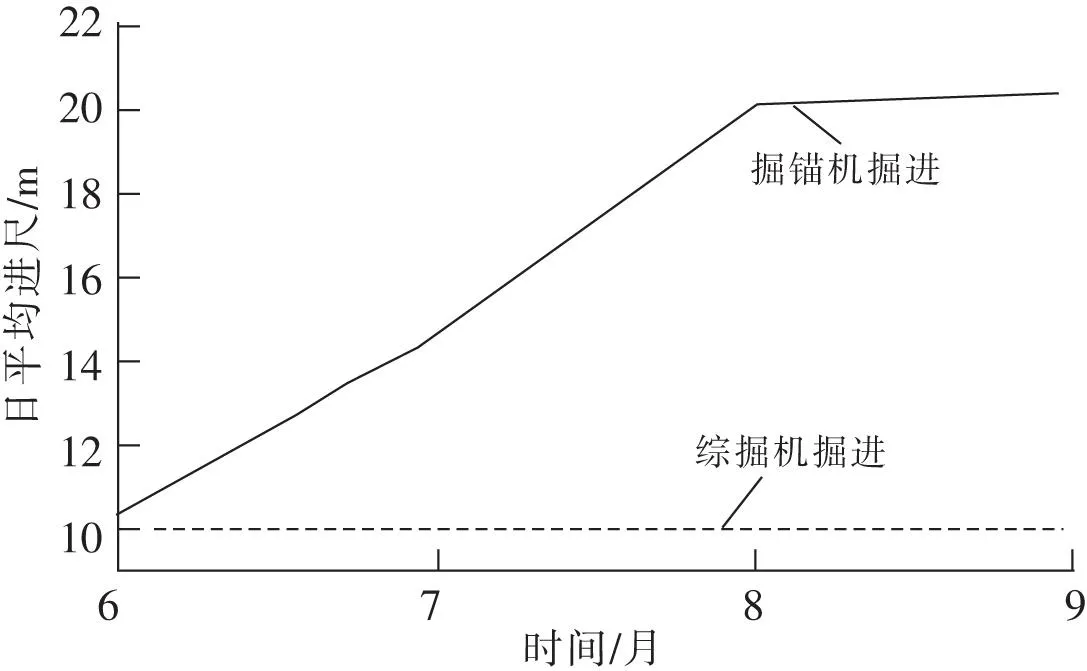
图7 掘进机平均进尺Fig.7 Average footage of excavator
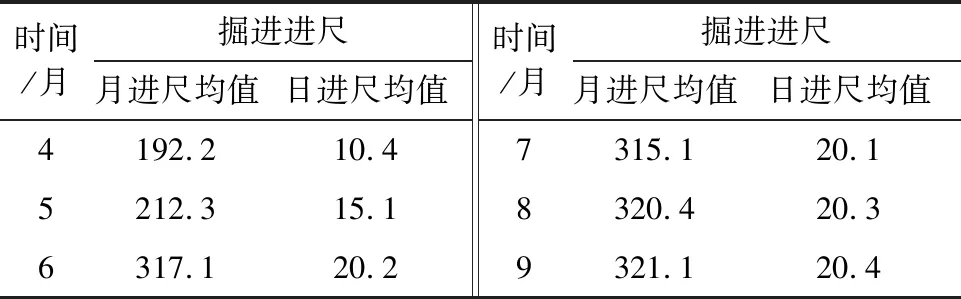
表2 掘锚一体化巷道进尺
4 结论
(1)该系统实现掘进工作面掘进、支护、运输全工序机械化连续作业;皮带输送机拉移次数降低,实现巷道掘进快速推进。有助于增强巷道粉尘综合治理,改善作业环境。
(2)实现掘进机、转载机和自移机尾一键远程智能控制,掘进机和自移机尾控制相互闭锁。除了能适应矩形、梯形、拱形等规则巷道,还可以根据巷道实际情况进行不规则形状记忆切割。
(3)通过红外防入侵技术识别未佩戴标识卡进入工作面的人员,并进行安全预警与自动保护停机;报警范围最大可达到100 m。实时定位误差小,精度可达30 cm;可以设置不同种类标识卡,并规定部分标识卡具有免报警特殊权限。
猜你喜欢
河南科技(2023年23期)2024-01-16
锻压装备与制造技术(2021年3期)2021-08-13
山东煤炭科技(2021年4期)2021-05-13
海洋工程装备与技术(2021年2期)2021-02-24
建材与装饰(2018年41期)2018-10-11
华南理工大学学报(自然科学版)(2017年5期)2017-07-18
中国海上油气(2015年3期)2015-07-01
机电产品开发与创新(2014年5期)2014-03-11
中国矿业(2013年4期)2013-09-07
船海工程(2013年6期)2013-03-11