
基于改进压缩采样匹配追踪算法的机械振动信号恢复
2024-03-05 08:35:24李一飞王桂宝李伟王磊杨坤王楠
机床与液压 2024年2期
李一飞, 王桂宝, 李伟, 王磊, 杨坤, 王楠
(陕西理工大学机械工程学院, 陕西汉中 723001)
0 前言
现代大型机电设备通常包含众多旋转机械结构,滚动轴承作为核心部件, 其健康程度影响旋转机械的稳定性[1]。 当滚动轴承产生故障时, 会导致整个机械设备运行效率降低, 甚至发生重大的生产事故[2]。 因此机械设备故障诊断与监测十分必要。 在滚动轴承的故障诊断与检测中, 会产生大量的机械信号数据, 而且振动信息采集必须遵守奈奎斯特采样定理。 该定理要求采样频率远大于被测频率, 至少是其最高频率的2 倍。 DONOHO 等[3-5]提出压缩感知, 该理论可以用更小的采样率对信号进行采样, 受到了医学[6]、 雷达[7]、 遥感图像[8]等方面的高度关注。
压缩感知理论中主要研究重构算法和传感矩阵的构造, 其中传感矩阵包括设计观测矩阵和稀疏表示。信号的稀疏表示是指信号可以在稀疏域中用几个较少的非零点表示, 使用创建的观测矩阵对信息降维处理,然后采用重建方法将信号信息重新恢复。 目前传统的重构算法可以划为3 类: 组合类算法、 凸优化算法和贪婪匹配追踪算法[9]。 3 种方法各有优缺点: 组合算法要求观测的样本数量最多, 但是计算效率最好; 凸松弛算法计算量最大, 但是在观测数目较少时才获得高的重构精度; 贪婪匹配算法对计算数量和准确度需求居中, 它也是3 种重建算法中使用最广泛的。 现有的贪婪匹配追踪算法有匹配追踪(Matching Pursuit,MP) 算 法[10]、 正 交 匹 配 追 踪(Orthogonal Matching Pursuit, OMP) 算法[11]、 分段正交匹配追踪(Stagewise Orthogonal Matching Pursuit, StOMP) 算法[12]、 压缩采样匹配追踪(Compressing Sampling Matching Pursuit,CoSaMP) 算 法[13]、 广 义 正 交 配 追 踪 (Generalized Orthogonal Matching Pursuit, GOMP) 算法[14]等。
在压缩感知中, 重构算法极为重要, 其性能将影响机械振动信号的恢复重构。 本文作者通过对比OMP 算法、 GOMP 算法、 CoSaMP 算法以及改进的CoSaMP (IO⁃CoSaMP) 算法应用于机械信号的恢复效果, 并分析重构概率和重构误差, 以期在工程实际中起到指导性作用。
1 压缩感知理论
1.1 基本理论
压缩感知理论重构的基本条件是: 所测得信号稀疏或者可以在变换域将其稀疏表现出来, 即原信号在稀疏区域只有几个不为零的量, 而剩下的大多数为零或者接近零; 信号通过观测矩阵投影, 从高维投射到低维, 最后利用少量的观测值通过重构或者计算重现原始信号。
设信号x为一维信号, 具有稀疏度K, 其长度为N, 令Ψ为信号稀疏基矩阵, 即Ψ为N×N的稀疏矩阵,θ则是稀疏系数。 那么x可以表示为
观测向量y由观测矩阵ϕ和测量信号x得到,ϕ是M×N(M≪N) 的测量矩阵, 观测数为M。 使A=ϕΨ,A被叫做感知矩阵, 观测向量为y(M×1) 可以用式(2) 表示:
y=ϕψθ=Aθ=ϕx(2)
由于观测矩阵ϕ的M≪N, 方程(2) 为欠定方程, 未知数的个数多而方程的个数少, 导致方程的解不唯一, 不能准确地重构出原始信号。 针对这个问题, 发现当具有K稀疏的向量z, 观测矩阵ϕ必须满足限制等距规则[15](RIP), 即
其中,ε>0。 由于x有一定的稀疏度, 且ϕ满足限制等距规则, 可以把解不唯一的问题转化为L0 范数的最优化问题, 即:
由于最小L0 范数优化求解存在NP-hard 问题,求解非常困难而且数值不够稳定, 文献[16]指出求解最小L0 范数的优化问题可以转化为L1 范数的优化问题, 即
根据公式(2) 可知: 为了得到稀疏系数θ需要利用观测向量y、 观测矩阵ϕ和稀疏基矩阵Ψ, 然后利用公式(1) 的稀疏矩阵与稀疏系数得到原始信号x。 用于信号压缩感知重构的方法有很多, 贪婪匹配追踪类算法的优点在于复杂度低、 计算量小和重构概率高, 所以得到了广泛的应用。
1.2 压缩采样匹配追踪算法及改进算法
压缩采样匹配追踪 (CoSaMP) 算法以ROMP(Regularized Othogonal Matching Pursuit) 算法为基础进行的改进, 较大程度上提升了重构准确度, 同时还延续了匹配追踪类算法的优势, 拥有相对较低的计算复杂性, 是一个理想的重构算法。 CoSaMP 算法同时也对OMP 算法做出改进, 迭代时需要选取多个原子,但除去原子之间的选取要求之外, 它与ROMP 的唯一区别就是: ROMP 每次迭代中选择的原子不会被丢弃, 而CoSaMP 算法每次迭代中选择原子的方式是取其精华去其糟粕, 即保留正确原子并且删除错误原子。 CoSaMP 算法利用了回溯思想, 每一次迭代都会不断地增加新的原子, 同时还会剔除掉上一次的错误原子, 从而使其重构准确率得到提高, 其成功重构依赖于观测值很多的情况。 针对以上问题提出的IOCo⁃SaMP 算法的流程如图1 所示。
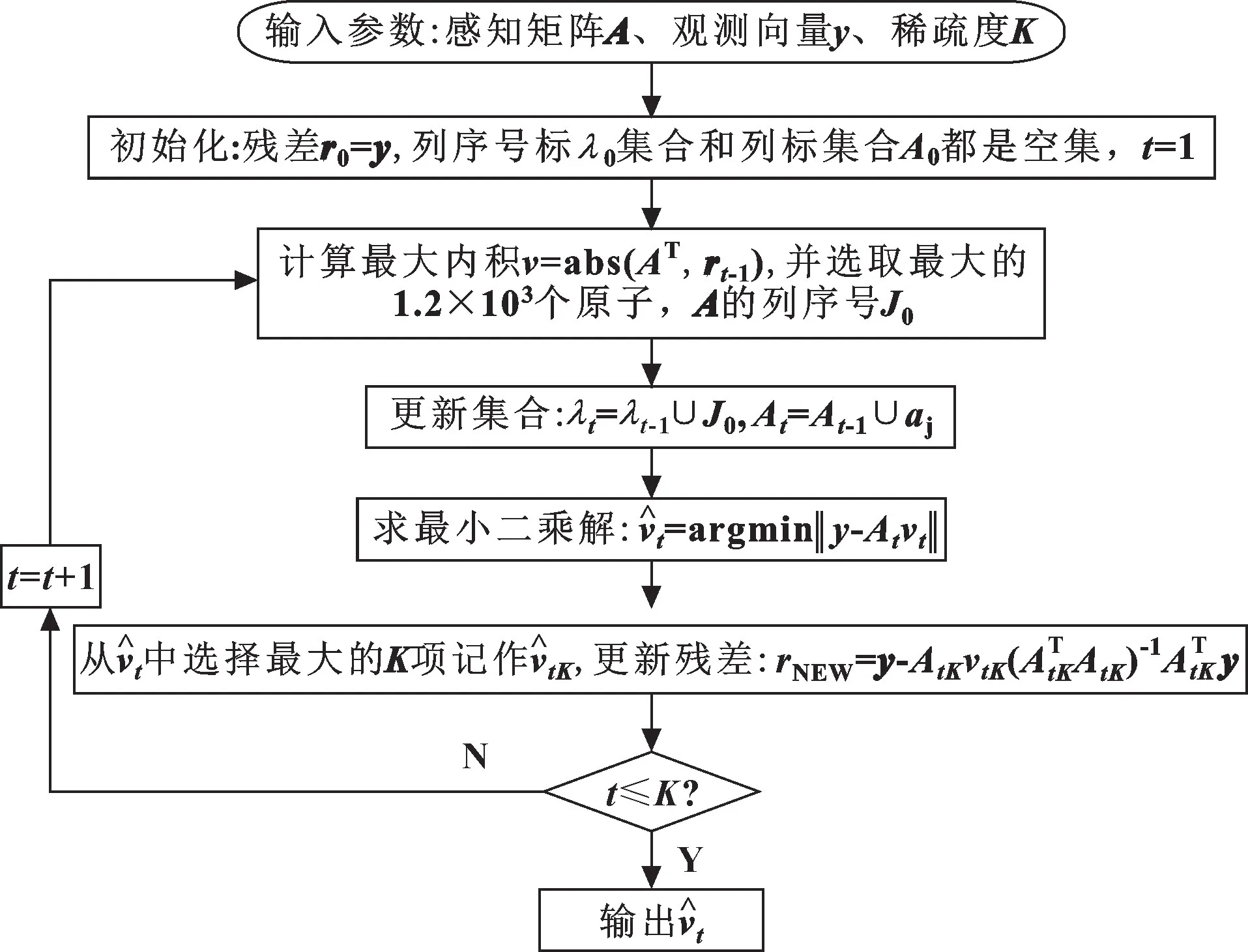
图1 IOCoSaMP 算法流程Fig.1 Algorithm flow of IOCoSaMP
观测值数目相同时, 重构率会随着稀疏度的增加而不断降低; 稀疏度相同时, 重构率会随着观测值的增加而提高, 但是观测的数目越多则重构时间越长。基于此, 作者改进了压缩采样匹配追踪算法。 由于太多的原子数会增加错误原子被选中的概率, 合适的原子数非常重要, 所以将原子数定为1.2×103个。 通过大量实验验证, 当原子数为1.2×103个时, 算法具有很好的重构性能, 1.2×103个原子既可以节省重构的时间, 还能够保证其重构精度。 利用仿真信号和实测轴承振动信号发现: 与同类算法相比, 在相同的重构概率下, 该算法所需的观测值更少, 稀疏度更高。
2 仿真实验结果分析
通过仿真信号与实测滚动轴承信号验证新算法的性能, 对比不同算法在观测值和稀疏度变化过程中重构概率的变化, 再用实测信号的重构误差来衡量算法的性能。 实验环境: 将新算法应用到64 位Windows10操作系统上, 运行内存为8 GB, 在MATLAB2016a 上运行。 为了证明算法的有效性, 对比OMP、 StOMP、ROMP、 gOMP、 CoSaMP 和IOCoSaMP 算法在不同稀疏程度下和不同观测值下的重构可能性。 结果显示:该方法在相同的重构概率下所需的观测数目更少, 但稀疏度却可以更大。
2.1 仿真数据验证
使用一维随机信号作为实验对象x∈RN, 观测矩阵选择高斯随机矩阵,N=256, 观测值M=130, 缺失了126 个数据点, 对信号以稀疏化的方式进行采样离散余弦变换, 稀疏度取40, 设ε=10-6算法迭代停止, 重构误差e表达式如下:
采用一维随机信号验证IOCoSaMP 算法, 结果如图2 所示。 从图2 (d) (e) 可以看出: 改进算法的重构误差不高于0.766, 而未改进算法的重构误差不高于1.132, 改进算法的重构误差小, 可以很好地重构出原始信号, 具有很好的重构性能。
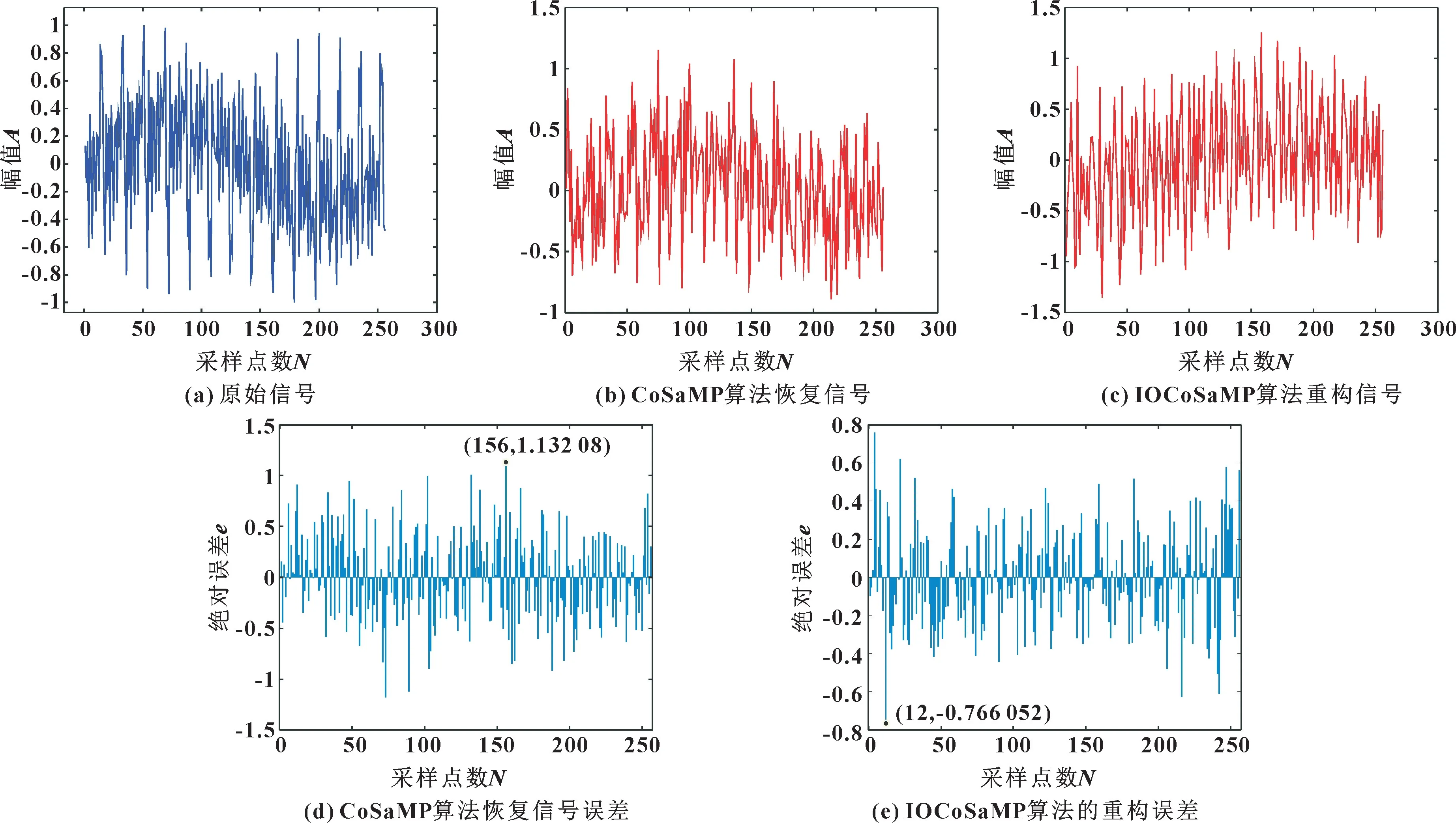
图2 一维随机信号重构结果Fig.2 1D random signal reconstruction results: (a) original signal; (b) restoring signal of CoSaMP algorithm; (c)reconstructed signal of IOCoSaMP algorithm; (d) restoring signal error of CoSaMP algorithm;(e) reconstructed signal error of IOCoSaMP algorithm
2.2 不同稀疏度下的重构概率
选取一维随机信号,M=128、N=256, 稀疏度在0~80 内, 步长为10, 重复实验1 000 次, 采用7种不同算法对同一个信号进行重构, 并测试了不同算法的重构概率随稀疏度的变化情况。 由图3 可知: 压缩采样匹配追踪算法与改进算法相比, 当稀疏度为50 时改进算法的重构概率可以达到100%, 而未改进算法的重构概率为0。
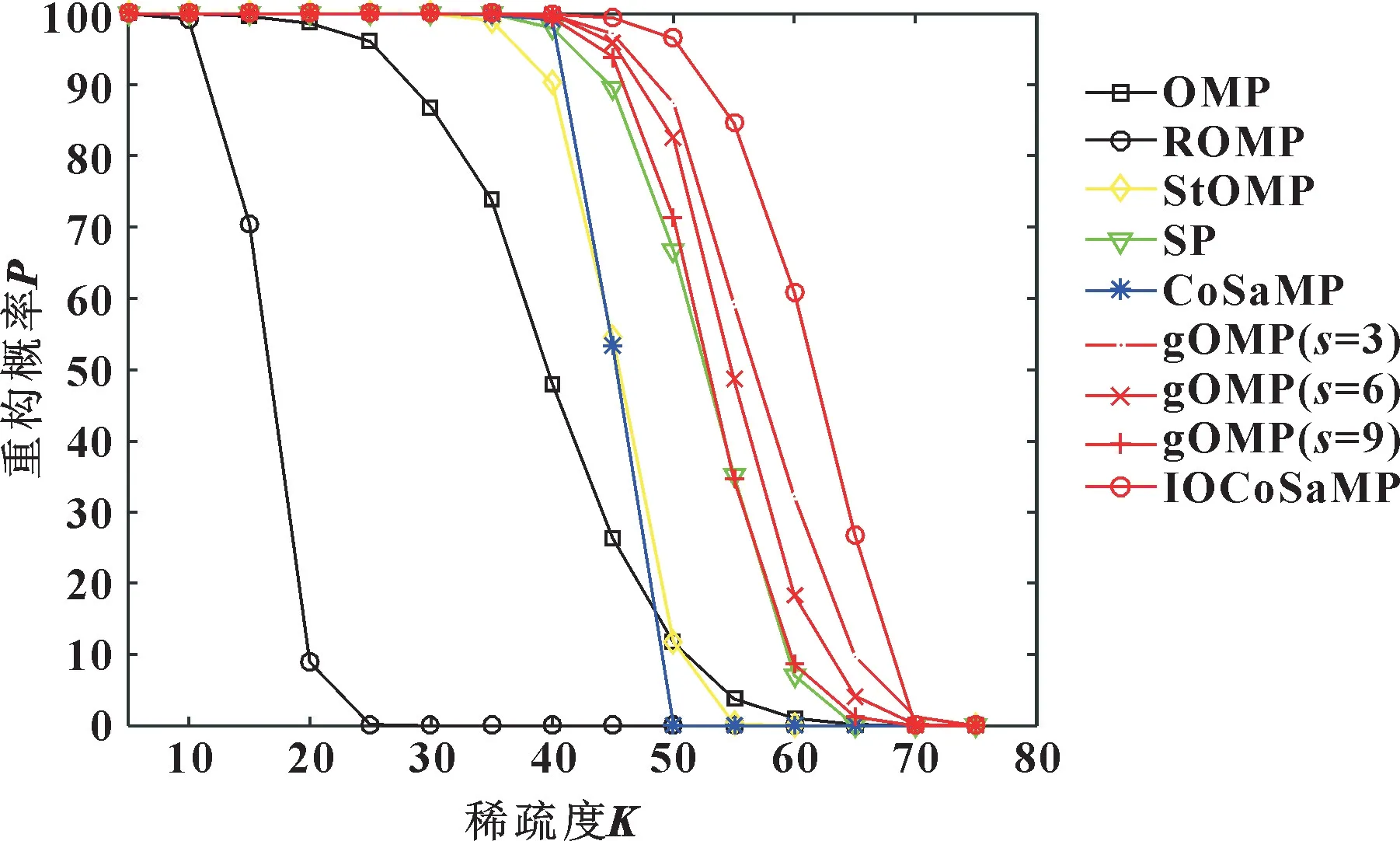
图3 不同算法的重构概率(不同稀疏度)Fig.3 Reconstruction probabilities of different algorithms(different sparsities)
2.3 不同观测值下的重构概率
选取一维随机信号作为实验对象,N=256、K=20, 观测值区间为[50, 110], 步长为10, 每种稀疏度重复实验1 000 次, 通过比较5 种算法的重构效果, 测试不同算法的重构概率随观测值的变化情况。从图4 可以看出: 在相同观测值时, IOCoSaMP 算法的重构概率高于其他算法, 并且当几种算法的重构概率相同时, 改进算法所需的观测值小于同类算法。
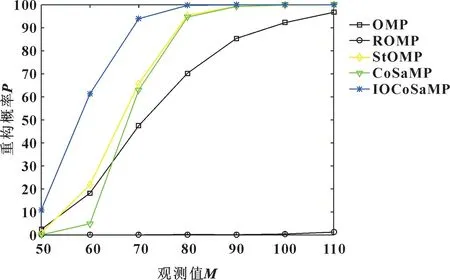
图4 不同算法的重构概率(不同观测值)Fig.4 Reconstruction probabilities of different algorithms(different observation values)
2.4 算法的性能比较
从图4 可以得出: 当稀疏度相同时, 随着观测值的增加, 重构概率相应提高, 改进算法的重构概率高于其他的算法。 当观测值为80 时, 利用IOCoSaMP算法可以达到100%的重构, StOMP 与CoSaMP 算法的观测值为90 时才可以达到和改进算法一样的效果,而OMP 需要更多的观测值。 图5 是将前面所述的仿真结果保存下来, 单独对比改进算法与OMP、gOMP、 CoSaMP 算法的性能, 改进的算法相较于OMP 和gOMP 以及CoSaMP 具有更高的重构概率、 更好的恢复效果。
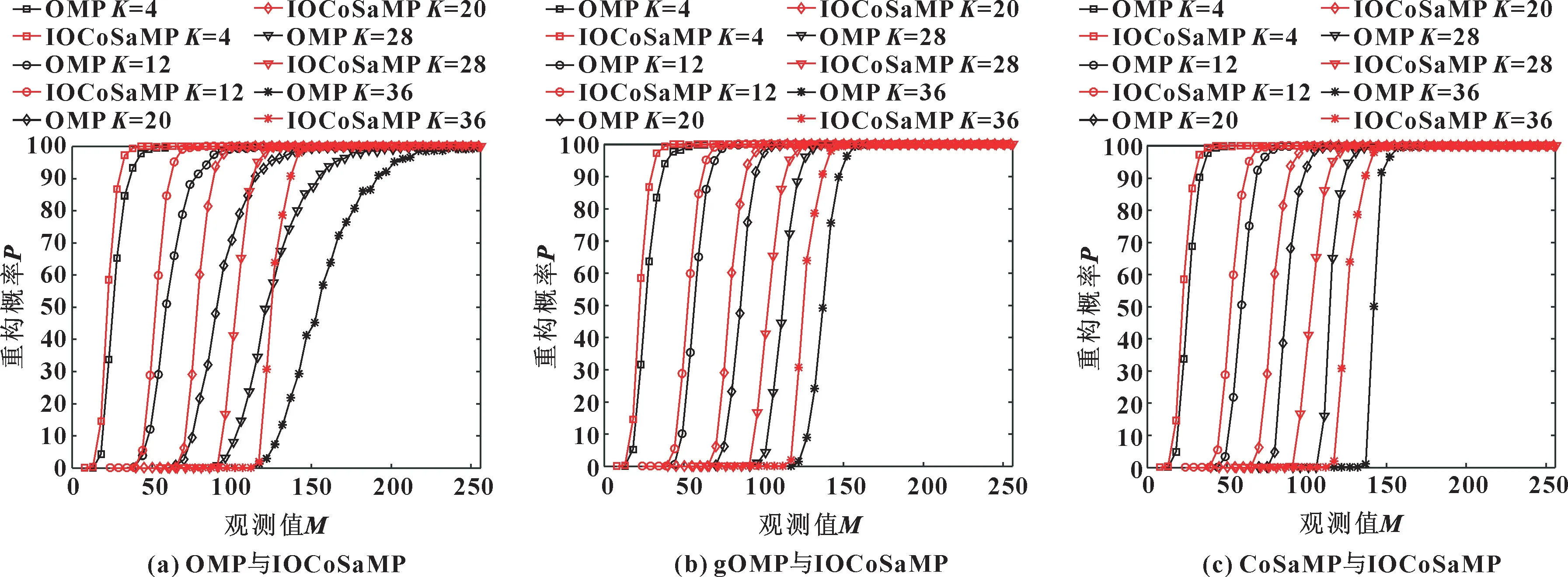
图5 算法间的对比Fig.5 Comparison between algorithms: (a) OMP and IOCoSaMP; (b) gOMP and IOCoSaMP; (c)CoSaMP and IOCoSaMP
2.5 实验
采用实测振动信号验证算法的重构能力。 滚动轴承的振动信号来源于美国西储大学的轴承数据, 设x∈RN(N=1 000)为实测轴承正常运行时的时域振动信号(实验轴承为6205⁃2RS JEK SKF 深沟球轴承,采样频率12×103Hz, 转速1 797 r/min, 负载754.7 W)。 从数据中取一段信号, 通过对比原始信号用CoSaMP 算法以及用改进算法恢复出的信号的重构误差来验证算法的有效性。
由图6 可知: 压缩采样匹配追踪算法的重构误差最高不超过0.176 8, 改进的压缩采样匹配追踪算法的误差最高不超过0.125 2, 重构误差降低了0.05,具有良好的重构性能。

图6 算法的重构误差验证Fig.6 Verification of the reconstruction error of the algorithm: (a) original signal; (b) missing signal; (c) restoring signal of CoSaMP algorithm; (d) restoring signal of IOCoSaMP algorithm; (e) reconstructed signal error of CoSaMP algorithm; (f) reconstructed signal error of IOCoSaMP algorithm
3 结论
文中提出的改进压缩采样匹配追踪算法选择更少的候选原子, 可以节省原子候选的时间, 降低错误原子被选中的概率。 仿真信号与实测轴承信号的仿真实验结果表明: 相同的稀疏度下, 所提算法的重构概率高于其他算法, 相同的观测值下, 改进算法较其他算法的重构概率高, 并且重构误差降低了0.05, 说明IOCoSaMP算法具有不错的重构效果和一定的应用价值。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
摄影世界(2022年1期)2022-01-21 10:50:14
少儿科学周刊·儿童版(2021年22期)2021-12-11 21:27:59
少儿科学周刊·儿童版(2021年22期)2021-12-11 21:27:59
少儿科学周刊·儿童版(2021年22期)2021-12-11 06:42:32
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
商周刊(2017年6期)2017-08-22 03:42:36
