
基于聚类的群孔特征在机测量摆角规划方法
2024-03-05 08:34张桂沈昕章绍昆姜振喜
机床与液压 2024年2期
张桂, 沈昕, 章绍昆, 姜振喜
(成都飞机工业(集团) 有限责任公司, 四川成都 610092)
0 前言
飞机蒙皮壁厚薄、 刚性弱, 且具有大量高精度群孔, 是典型的薄壁易变形零件[1-2]。 为保证蒙皮群孔的测量精度, 通常采用触发式测头在机床原位进行相关尺寸的测量[3]。
触发式测头的测量精度受测量速度、 测针长度、触发方向、 测量摆角等多重因素影响[4-5], 其中, 测量摆角是影响触发式测头精度的主要因素之一[6]。 为提高触发式测头的测量精度, 在正式测量前, 需对不同的测量摆角进行单独的误差标定[7-9]。 由于飞机蒙皮群孔数量多, 孔法矢方向多变, 为避免测量干涉,需要使用大量测量摆角, 若不规划测量摆角, 将导致测头标定工作量急剧上升, 甚至远超测量环节的工作量。 如何在不产生测量干涉的前提下, 尽可能减少群孔特征的测量摆角数量, 是群孔特征在机测量的现实问题。
国内外学者对触发式测头测量摆角的规划进行了大量研究。 三坐标测量机是触发式测头的主要应用场景, 为减少测量摆角数量, 海克斯康等测量机厂商先将测量摆角的空间按一定的分度离散, 并使用离散后的节点摆角替代临近摆角, 从而降低备选测量摆角数量; 易晓满等[10]在此基础上, 对离散后的节点摆角进行优选, 快速计算了待测群孔所需的测量摆角, 并将摆角规划结果应用到在机测量上; 尹周平等[11]基于可视锥理论, 在点的可视锥基础上, 定义了完全可视锥与部分可视锥, 并实现了CMM 测量的摆角规划; 李文龙等[12-13]以测量路径优化为目标函数, 在可接近锥中计算最优测轴, 实现了无干涉且全局光顺的五轴原位检测路径; JEON 等[14]提出了一种基于三维形状特征向量相似性分析的测量路径生成方法, 利用已有模型快速计算新模型的测量摆角及测量轨迹。上述研究多以测量轨迹最短或测量摆角光顺过渡为目标, 并未考虑测量摆角数量增加带来的探头标定工作量。 而关于减少测量摆角数量的研究则严重依赖经验参数, 存在显著的冗余解。
针对上述问题, 本文作者提出基于聚类的群孔特征测量摆角规划方法, 首先以群孔法矢、 测量深度及测针尺寸为输入, 建立孔特征测量干涉几何约束条件; 然后以测量摆角数量最少为目标, 通过自增长迭代聚类, 自动求解群孔特征测量摆角集合, 降低测头标定时间, 提升综合测量效率; 最后通过群孔摆角规划实验验证所提方法有效性。
1 群孔测量摆角规划聚类算法
1.1 孔特征测量干涉几何约束
使用触发式测头测量孔特征时, 需将测针深入孔内, 然后沿着孔径进行多次触测, 最后将测量值进行拟合, 计算孔的位置信息及孔径信息。 为保证测量的准确性, 要求触测次数不少于3 次, 触测方向沿孔周均布。 图1 所示为孔特征测量示意。

图1 孔特征测量示意Fig.1 Schematic of measuring hole feature
当测针轴线与孔轴线不重合时, 测杆可能先于测针球头与孔壁接触, 从而发生测量干涉, 如图2 所示。 可以看出: 在测头直径、 测针直径、 检测深度确定的情况下, 测针轴线与孔轴线偏移量越大, 干涉风险越大。 因此, 可以定义测针轴线与孔轴线之间的测量干涉临界夹角Tagl来描述孔测量干涉的几何约束条件, 其计算方法如下:

图2 孔测量碰撞干涉几何约束Fig.2 Interference restricts during measuring hole

图3 测量摆角规划示意Fig.3 Schematic of rotary angles planning
式中:d为测杆直径;D为测针球头直径;h为孔测量深度。
实际测量时, 为避免干涉碰撞, 通常留有一定的安全裕度TA, 实际允许的干涉临界夹角:
1.2 群孔测量摆角规划模型
群孔测量不仅需要避免单个孔特征测量干涉, 还需尽可能减少测量摆角的数量, 从而降低测头标定工作量, 提高综合测量效率。

1.3 测量摆角聚类求解方法
群孔测量摆角规划是一类聚类问题, 但与几类经典聚类问题不同的是: 群孔测量摆角规划无法提前确定类簇个数, 且群孔摆角规划中各类簇具有统一的约束条件——使用同一摆角测量时不发生干涉。 这导致需要预知目标类簇个数的聚类方法K-means[15]及基于密度的聚类方法mean-shift[16]、 DBSCAN[17]均无法很好地求解该问题。
文中在K-means 算法的基础上, 以余弦相似度作为测度函数, 先将群孔轴线单位法矢聚为一类, 并以类簇中心值作为测量摆角法矢校验聚类结果是否存在测量干涉, 若存在干涉, 则以最大不相似度对应的孔轴线为中心值, 增加类簇, 重新执行聚类, 直到各类簇均满足无测量干涉要求, 聚类结束。 图4 所示为算法的基本流程。

图4 群孔测量摆角规划算法流程Fig.4 Flow of rotary angles planning algorithm
各求解步骤详述如下:
步骤1, 输入数据集A、 类簇个数k=0、 聚类收敛阈值θ、 测针球径D、 测杆直径d、 测量深度h, 按式(2) 计算碰撞干涉阈值TL。
步骤2, 令k=1, 类簇中心c1=∑ai/cardA(ai∈A)。
步骤3, ∀ai∈A, 计算ai与cα(α=1, 2, …,k) 的余弦相似度σi,α=cos (ai,cα), 并以此为测度函数将ai划分至相似度最大的类簇, 进而将A划分为Π= {Aα Aα⊆A,Aα≠∅, ∩Aα=∅, ∪Aα=A}。当k=1 时,Π= {A1},A1=A。
步骤4, 对于每一个类簇Aα, 将其中心值更新为
步骤5, 若对于任意的cα及c′α均满足二者的夹角〈cα,c′α〉 <θ, 此次聚类结束, 执行步骤6, 否则令cα=c′α, 执行步骤3。
步骤6, 遍历ai及其与所在类簇中心的余弦相似度σi, 定义f(A)=min(σi)为A的最小相似度, 若f(A)>cos(TL), 则各cα均可无干涉测量对应Aα中所有孔, 记为Mα(cα,Aα),M={M1(c1,A1),M2(c2,A2),…,Mk(ck,Ak)}即为摆角规划结果, 执行步骤8。否则, 令k=k+1, 执行步骤7。 图5 所示为k=1 时该步骤求解结果示意。

图5 k=1 时步骤6 求解结果示意Fig.5 Solution result of step 6 with k=1
步骤7, 查找最小相似度f(A)对应的am, 令ck=am,Ak=∅, 执行步骤3。 图6 所示为k=2 时该步骤求解结果示意。

图6 k=2 时步骤7 求解结果示意Fig.6 Solution result of step 7 with k=2
步骤8, 摆角换算。 根据机床旋转轴类型, 将M中各测量法矢换算为对应的测量摆角, 结束。
图7 所示为测量摆角求解过程中各个阶段的聚类结果。 在k=5 时满足不干涉条件, 摆角规划结束。

图7 不同阶段测量摆角聚类结果Fig.7 Clustering results at different stages: (a) k=3;(b) k=5
在求解过程中, 随着类簇个数k不断增加, 其必然收敛, 当收敛速度最慢时, 其收敛于k=cardA, 此时, 测量摆角数量等于待测孔数量, 测量摆角法矢为待测孔法矢。
2 仿真与实验分析
分别开展群孔测量摆角规划仿真和测量实验, 并与文献[10]中所列方法进行对比, 以验证文中测量摆角规划方法的有效性。
2.1 群孔测量摆角规划仿真
群孔测量摆角规划仿真所用孔位数据如表1 所示, 孔测量深度为h=3.5 mm, 所用测头测杆直径d=4.3 mm, 测针球头直径D=6 mm。
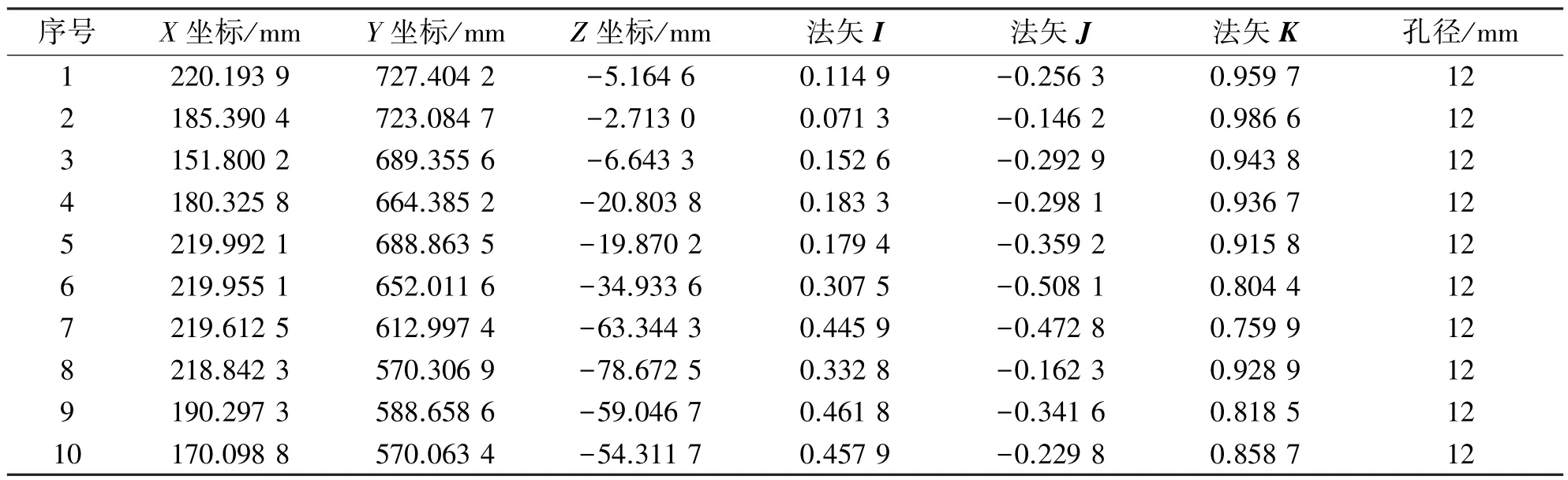
表1 摆角规划测试对象Tab.1 Experimental objects of rotary angles planning
分别采用文中方法和文献[10]方法进行摆角规划。 采用文中方法进行摆角规划时, 取TA=0.5°, 由式(2) 求得TL=12.3°。 在文献[10]方法中, 取摆角间隔为15°。 2 种方法的摆角规划结果如表2 所示。可以看出: 文献[10]需要6 组测量摆角才能实现所有孔特征的无干涉测量, 而文中方法仅需3 组测量摆角即可实现所有孔特征的无干涉测量。 可见, 与文献[10]相比, 文中方法可有效减少群孔测量摆角数量。
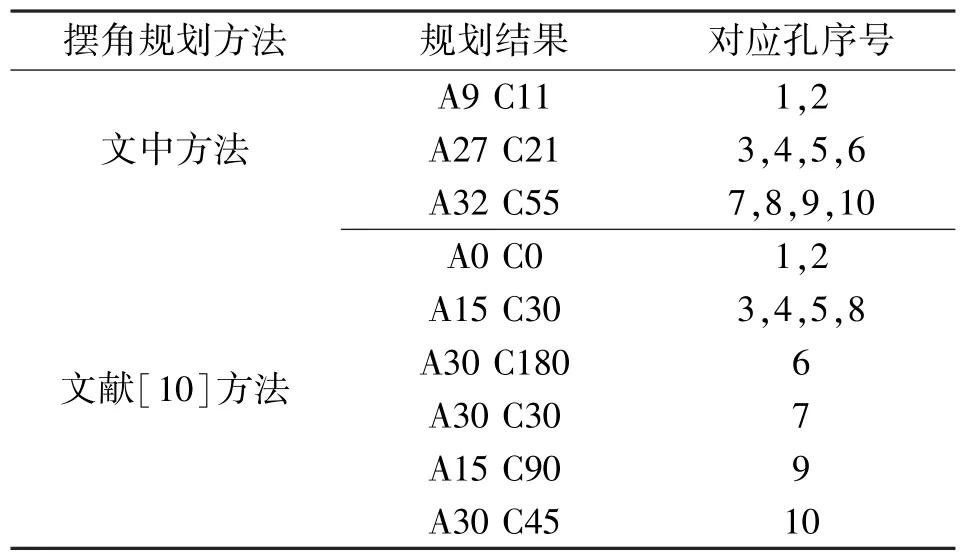
表2 摆角划分结果Tab.2 Rotary angles planning result
2.2 群孔测量实验
为进一步验证文中方法在测量摆角数量及综合测量效率方面的优势, 选用某型号飞机2 项蒙皮零件作为实验件开展群孔测量实验。
实验件信息如图8 所示, 所用机床为拓璞GMT1820⁃5C 型AC 双摆头五轴数控机床, 所用测头为Renishaw RMP60, 测杆直径d=4.3 mm, 测针球头直径D=6 mm。 测头标定使用直径30 mm 的球形标准器, 标定方法参考文献[7], 对2 种测量摆角规划方法进行测试时, 触测距离、 进给速度等测量参数均保持一致。
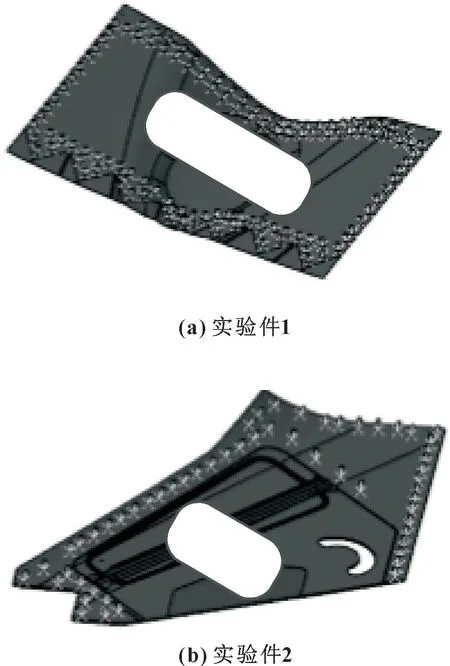
图8 实验件示意Fig.8 Schematic of experimental parts: (a) experimental part 1; (b) experimental part 2
实验件1 的测量摆角的分布情况如图9 所示, 实验件2 的测量摆角的分布情况如图10 所示, 其中,实验件1 的孔数为116, 测量深度为4 mm, 实验件2的孔数为56, 测量深度为3.5 mm。 摆角划分结果及综合测量耗时情况如表3 所示。 经检验, 使用文中方法及文献[10]方法所求摆角规划均能实现对应零件的无干涉测量。 相对于文献[10], 采用文中方法规划的摆角数量分别下降2 个(25%) 与1 个(33%),对应的标定时间分别减少24.82%与33.15%, 对应的综合测量时间分别减少19.16%与23.94%, 测量效率得到显著提升。

表3 实验件摆角划分结果及测量综合耗时情况Tab.3 Results of rotary angles planning and time-consuming scale for experimental parts
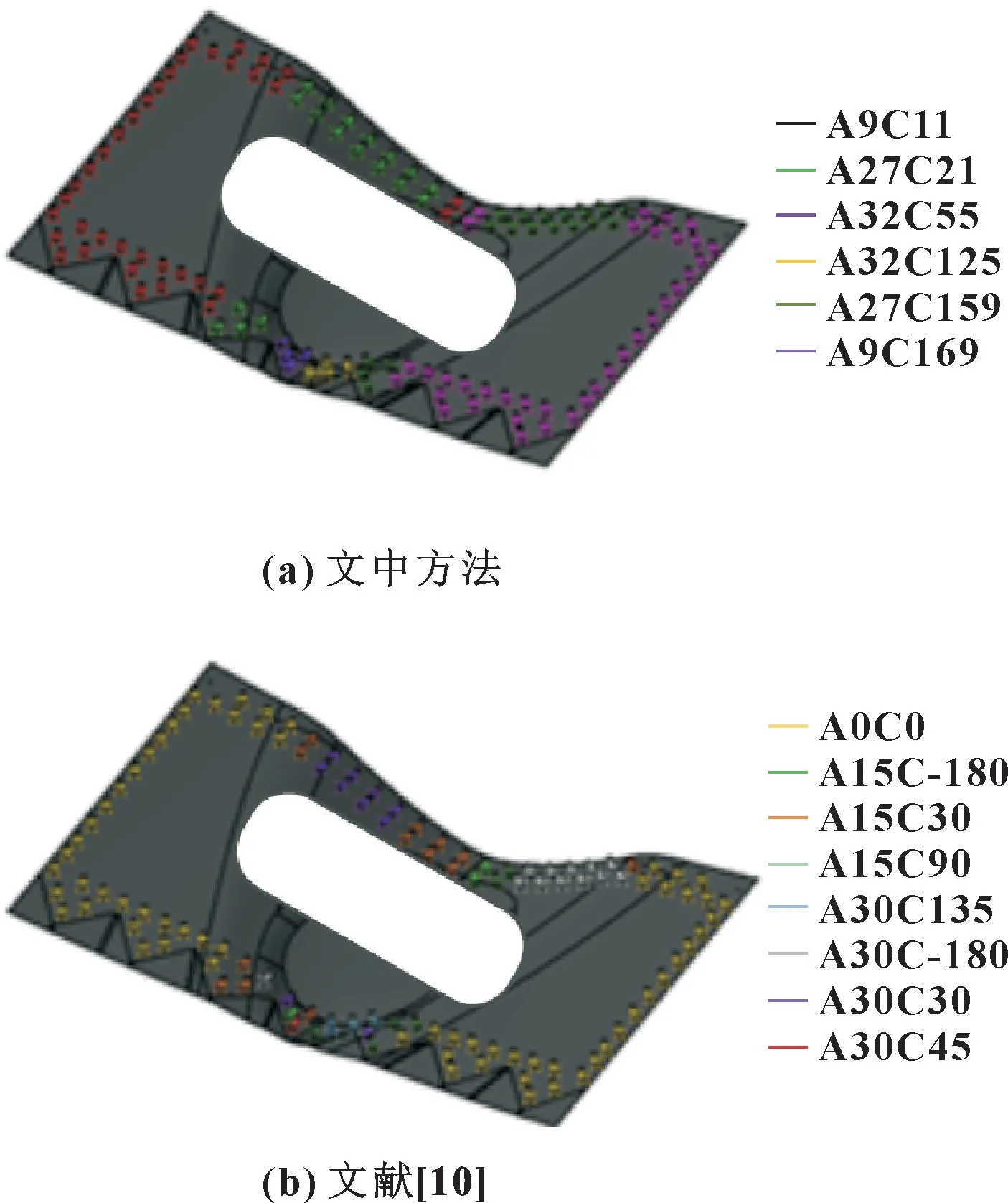
图9 实验件1 摆角划分结果Fig.9 Results of rotary angles planning for experimental part 1: (a) the proposed method;(b) reference [10]

图10 实验件2 摆角划分结果Fig.10 Results of rotary angles planning for experimental part 2: (a) the proposed method;(b) reference [10]
应用文中方法对某机型全部蒙皮进行测量摆角划分并实际生产, 经统计, 采用文中方法后, 测量摆角数量较文献[10]平均下降约28%, 综合测量耗时减少约19%。
3 结论
(1) 分析了孔特征测量干涉几何约束, 确立了测针摆角法矢与孔轴线法矢无干涉测量时的夹角阈值, 并在此基础上建立了群孔测量摆角规划模型。
(2) 设计了迭代聚类算法, 自动求解了群孔特征测量摆角, 经实验验证, 相较传统方法, 文中方法使测量摆角数量下降约28%, 综合测量耗时降低约19%, 提高了在机测量的综合测量效率。
(3) 文中方法所求的测量摆角规划结果并非测量摆角数量最少的最优解, 其最优解问题还需进一步探索。
猜你喜欢
制造技术与机床(2019年7期)2019-07-22
中学教学参考·理科版(2018年3期)2018-05-23
领导决策信息(2018年50期)2018-02-22
电子测试(2017年15期)2017-12-18
商周刊(2017年5期)2017-08-22
雷达学报(2017年6期)2017-03-26
亚太教育(2016年35期)2016-12-21
中国卫生(2016年2期)2016-11-12
中国工程咨询(2016年4期)2016-02-14
电子设计工程(2015年6期)2015-02-27
