动态能源与地理信息融合的光储充电站电动汽车充电路径引导
2024-03-04 09:07:54杨有为徐春梅彭道刚
电力自动化设备 2024年2期
杨有为,徐春梅,彭道刚,邢 蕾
(上海电力大学 自动化工程学院,上海 200090)
0 引言
为了实现碳中和、碳达峰的“双碳”目标,电动汽车(electric vehicle,EV)作为清洁能源交通工具蓬勃发展,也带动了配套设施的清洁化转型。由于EV具有交通载具和电力负荷的两面性,其出行同时受到交通路网、能源网络的影响[1]。此外,相较于传统的充电站,光储充电站的光伏、储能、充电站三部分构成微电网独立运行,有效解决了光伏出力不连续的问题,提高了区域清洁能源的利用率,从而得到广泛应用。因此,统筹区域的动态地理信息与新兴能源系统进行EV充电引导很有必要。
目前已有较多关于EV 充电引导策略方面的研究:文献[2]以EV 用户的时间成本与经济成本最小为目标,提出了基于分布式架构和最小一致性算法的充电引导策略;文献[3]提出了基于群感知的实时交通数据采集与分解技术,利用道路交通速度矩阵对EV 进行导航;文献[4]提出了“时间-流量”模型对实时交通信息进行建模,以充电站在站车辆、充电站负荷、EV 行驶时间为优化目标,对EV 进行路径规划;文献[5]提出了一种EV充电动态队列模型,根据每座充电站的排队情况,利用价格引导用户去往占用率低的充电站进行充电;文献[6]基于用户与充电站各自的偏好,提出了考虑EV充电站选择冲突的充电引导策略;文献[7]基于动态参考点以及节点边际电价,提出了一种基于第三代前景理论的充电引导策略。虽然上述研究对实时数据下的动态规划进行了探讨,但是仅侧重于单一的用户、交通网络、电网或者充电站,对多源动态数据下的交互引导研究不足。
此外,也有针对EV 路径规划算法方面的研究:文献[8]根据EV 行驶的实际工况对单体EV 的负荷设备进行分类建模,以时间成本与经济成本最低为目标,采用遗传算法求解最优路径;文献[9]采用分层强化学习算法分别对EV 的充电目的地与充电路径进行实时优化,有效地降低了EV 充电费用;文献[10]采用蚁群算法对不同场景下的EV 路径规划问题进行求解,解决了EV在单次出行过程中的能量焦虑问题;文献[11]考虑EV充电完成后下一目的地的到达便捷性,提出了结合Floyd搜索算法以及排队论的EV充电引导模型;文献[12]采用变邻域模拟退火算法对带时间窗变速的车辆路径配送问题进行优化求解;文献[13]基于道路分级提出了融合分层规划和A*算法的共享汽车充换电引导策略,大幅降低了模型的求解复杂度。虽然上述研究对单体EV 的路径规划具有较好的实现效果,但在实际多车交互动态环境下,算法的实时性与响应速度仍需改善。
综上所述,本文以光储充电站的运行模型和EV动态路阻能耗模型为纽带,构建了精细化的车-站-路-网一体化模型,并综合考虑交通、能源、车辆三方,对EV充电引导过程以及充电目的地选择同时进行优化,以克服目前能源地理耦合系统中因城市功能区划分带来的区域交通不均衡以及光伏发电不灵活带来的部分光储充电站能源消纳不充分的问题。然后,提出了一种基于分层规划的双向搜索LPA*算法,以提高路网的搜索效率。最后,基于算例将本文所提策略与现有2 种充电策略进行对比,验证所提策略的有效性。
1 能源地理信息融合的车-站-路-网模型
动态能源与地理信息融合的车-站-路-网模型整体架构如图1 所示,交通网络依托车载导航、手机、平板等智能终端以及监控探头、测速仪,对实时地理信息(如车辆位置、路段路况)进行获取;光储充电站安装的智能感知设备(如红外探测仪、智能充电桩)对当前充电站的负荷状态、充电车辆以及在站车辆信息进行收集;中央数据平台基于收集到的信息构建车-站-路-网多目标优化策略,并将结果反馈给接受调度的EV用户。随着用户接受调度之后出行、充电行为的变化,数据中心收集到的能源与地理信息也随之发生动态变化,当部分信息变化达到一定的程度时,其他用户的出行、充电策略也会接受实时校正,从而保证整体系统最优。
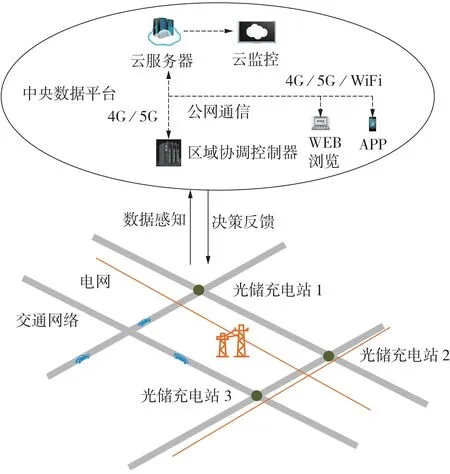
图1 车-站-路-网模型的整体架构Fig.1 Overall architecture of EV-station-roadnetwork model
1.1 地理信息模型
1.1.1 动态路网的拓扑结构
本文采用图论的相关分析理论[14]对地理信息系统中路径规划研究所需的城市路网模型以及交通情况进行有向权图转化,并且引入时间参数实时反映地理信息的动态变化情况。交通路网的模型可以表示为:
式中:GT为交通路网模型,是有向带权网络;N为路网中的节点集合;l为路网中节点数量;A为路网中所有路段的集合;nij为连接节点ni和节点nj的路段;K为时段集合;m为全天划分的时段数量;W为路段的路阻系数矩阵,wij,k为k时段路段nij的路阻系数。
此外,根据城市路网结构以及《城市道路工程设计规范》,将城市道路分为快速路、主干路、次干路、支路4级,具体分级方法见附录A表A1。
1.1.2 道路路阻模型
在引入时段集合变量K的前提下,与传统的静态路网模型不同的是,城市道路的交通流量会随着时间发生变化,因此为了描述EV用户在不同时段的行程花费,需要对路阻系数矩阵W进行建模并量化。由于传统使用的路段长度为静态参数,既不能反映道路交通的动态变化情况,也很难表征道路交叉口对整个通行过程的影响,因此本文采用改进的美国道路局(Bureau of Public Road,BRP)模型和改进Webster模型对路段阻抗和节点阻抗进行标定[15],分别如式(2)和式(3)所示。
式中:Rij,k为k时段路段nij的阻抗;Ci,k为k时段节点ni的阻抗;t0为道路的理想行程时间;S为道路饱和度;α、β为阻抗影响参数;q为车辆到达率;c为信号周期;λ为绿信比,即一个信号灯周期内绿灯时间的占比。
考虑到车辆行驶时间除了受路段拥堵情况的影响,还会受路口信号灯的控制,因此道路路阻应包括路段路阻和节点路阻,则k时段路段nij的路阻系数wij,k可表示为:
1.2 能源网络模型
本文所研究的EV 相关能源网络模型主要为电网模型,其负荷设施为光储充电站。结合城市电网的实际情况,本文采用IEEE 33 节点标准配电网模型,各充电站通过10 kV/0.4 kV 变压器直接接入配电网,并对光储充电站的负荷进行建模。
光伏发电功率数据可直接由电站获取。t时刻储能系统的充放电模型可表示为:
式中:Sbat,t、Sbat,t-1分别为t、t-1 时刻储能系统的荷电状态(state of charge,SOC);εch、εdis分别为储能系统的充电效率和放电效率;Pbat,ch、Pbat,dis分别为储能系统的充、放电功率;Δt为时间间隔;Cbat为储能系统的容量。
考虑到分时电价,光储系统采用以下方案[16]:
1)峰时段优先使用光伏为EV充电,当光伏功率不足且负荷高于节点负荷阈值的20 % 时,利用储能系统;
2)平时段光伏优先满足充电站的基础负荷,余电存储于储能系统,若平时段储能系统的SOC 低于20%,则额外向电网购电直至储能SOC 达到50 % 或平时段结束;
3)谷时段储能系统向大电网购电。
对于配电网节点a处的光储充电站,其在任一时段的节点负荷Pa可视为该电站在当前时段所有负荷的累加,即:
式中:Pev为EV 的总充电功率;Ppv为光伏的发电功率;Pbat为储能系统的充放电功率,充电时为正值,放电时为负值。
1.3 EV模型
本文引导的主要对象为有出行需求且需能源补给的EV用户,因此对EV用户集群做以下假设:①各充电站站点的充电桩均为快速充电桩,充电时长为40~60 min;②参与调度的EV 的参数特性近似为同一规格。
1)空间分布信息。
对接受引导的p辆EV 进行编号,每一辆EV 的状态集合用EEV,(ee=1,2,…,p)表示,记录每一辆参与引导的EV 的起点、终点及其电池SOC,基于状态集合对EV的充电需求进行判定,如式(7)所示。
式中:Nch,e为第e辆EV 所选充电站;s为充电站编号;ce,e为第e辆EV 的充电需求标志,若第e辆EV 产生充电需求,则ce,e=1,否则ce,e=0。
2)电池能量状态以及充电信息。
考虑到EV 在实时路网中的能耗与交通拥堵情况有关[17],对EV每行驶1 km的耗电量ES进行建模,如式(8)所示。
式中:v为路段的实际平均速度。
设置EV 电池的相关参数基本一致,根据式(8)可以得到ES,电池充满电时的电量范围为100~120 kW·h,初始时刻第e辆EV电池的剩余电量BO,e∈[0.5Bm,e,0.8Bm,e],其中Bm,e为第e辆EV 电池的容量,则t时刻EV电池的剩余电量Bt,e可表示为:
式中:ηe为能效指标,取值范围通常为0.8~0.9;Δd为t-1时刻到t时刻第e辆EV的行驶里程。
基于EV 电池的实时电量,设置EV 充电需求的触发条件为:
式中:ζB为电池的SOC,取值范围为20 %~30 %;Lr为当前EV距离目的地的剩余行驶里程。
3)EV充电行为动态信息。
EV 的充电行为过程主要分为行驶过程和充电过程2 个阶段,行驶过程可以用EV 通过路径规划到达充电站的时刻tc,e表示,如式(12)所示。
式中:tb,e为第e辆EV开始参与调度的时刻;Rsc,e为路径引导后第e辆EV行程中的路段集合;qij为EV是否通过路段nij的状态变量,若通过则qij=1,若不通过则qij=0。
充电过程可用充电等待时间Tw,e和充电时间TQ,e表示,Tw,e、TQ,e的计算式分别为:
式中:td,e-1为充电队列中第e辆EV 的前面1辆EV 的充电结束时刻;ζc为充电桩的充电效率;Pc为充电桩的充电功率。
2 基于分层规划的EV路径引导策略
在构建的EV 出行模型中综合考虑了地理和能源双向网络的影响,因此需要综合交通路网、配电网以及EV用户三者的需求制定综合目标函数,并基于分层规划的路径导航算法为EV车主提供最佳路径。
2.1 优化目标
1)交通侧的目标函数。
考虑到需要选取地理与能源信息同时对EV 产生影响的阶段,因此只考虑EV用户从出发到完成充电这一阶段中交通路网的动态变化。考虑充电站节点附近交通阻塞情况的优化目标函数F1为:
式中:Mn,s,t为t时刻充电站s内停留的EV 数量;Cs,s,e,t为t时刻第e辆EV 是否停留在充电站s的状态变量,若停留则Cs,s,e,t=1,若不停留则Cs,s,e,t=0。
2)电力侧的目标函数。
考虑到不同充电站的规模差异大,配电网给定负荷不同的情况,为了保证区域内充电站均衡消纳EV 充电负荷,使得配电网整体平稳运行,以电压偏差最小为优化目标函数F2,如式(17)所示。
式中:ΔUs,t为t时刻充电站s处节点的电压偏差;U0为节点的额定电压;Us,t为t时刻充电站s处节点的实际电压。
3)用户侧的目标函数。
由式(12)—(15)可知,时间成本更容易反映EV用户的出行满意度,因此考虑以EV从发送充电需求到到达充电站时段内的总时间成本为优化目标函数F3,如式(18)所示。
4)综合目标函数。
综上所述,采用极值法对多目标函数进行无量纲化,可得综合目标函数F为:
式 中:μ1、μ2、μ3为 不 同 优 化 目 标 的 权 重 值;min {F1}、min {F2}、min {F3}分别为单独从交通路网通畅性、配电网稳定性、EV 用户角度考虑的最优目标函数值。本文考虑同时满足路径车流量小、行驶时间短、站点等待充电车辆少、电网节点波动小等要求规划最优充电路径。
2.2 约束条件
1)EV电量约束。
为了防止因路阻变化导致EV 未到达目标充电站就提前耗尽电量的情况发生,设定到达目标充电站时的剩余电量应不低于当前剩余电量的10 %,如式(20)所示。
式中:ηB为电量指标,取值为0.9;Lc,e为当前时刻第e辆EV到达目标充电站的剩余行驶里程。
2)配电网稳定性约束。
从电力系统安全性角度出发,充电站的实际负荷不能超过其阈值,即:
式中:Pk,s,t为t时刻充电站s的负荷;Pthr,s,t为t时刻充电站s的负荷阈值。
考虑到储能系统的寿命,对其SOC进行约束,如式(22)所示。
式中:Sbat,max、Sbat,min分别为储能系统允许的最大、最小SOC。
3)交通路网约束。
考虑到交通拥堵规避问题,对路段的最低通行速度进行约束,即:
式中:v0为路段理想的最高通行速度;Lij为路段nij的长度。
同时为了避免EV 充电路径与出行方向的偏离程度过大而产生绕行距离[18],引入偏离角θsD,即起点o到充电站s的线段与起点o到终点D的线段之间的夹角,对目标充电站的选择方向进行约束,如式(24)所示。
式中:dos、doD、dsD分别为起点o与充电站s、起点o与终点D、充电站s与终点D之间的直线距离。当0<cosθsD<1时,表明选择方向正确。
2.3 充电路径引导流程
EV 充电路径引导策略如附录A 图A1 所示,具体步骤如下。
1)读取当前EV、交通路网、配电网的实时信息,其中EV 实时信息包括当前位置、目标充电站位置、剩余电量、上传充电需求时刻,交通路网信息包括道路实时路阻系数、充电站等候车辆,配电网信息包括光储运行情况、充电桩使用情况等。
2)规划行驶路径:平台对充电需求标志位进行判断,当没有产生充电需求时,随时记录EV 当前的位置Dt,e、行驶速度ve,e,EV 以行驶时间最短为目标对目的地进行导航,根据当前路阻系数对导航路径进行规划,在到达目的地前随时跟踪并更新所有规划路段的路阻信息,若规划行驶路段的交通情况突然剧烈恶化,则在用户到达下一节点前以下一节点为起点完成路径规划,并提示用户对路径进行修正,到达目的地后更新电池的剩余电量Bt,e,完成此次行程。
3)充电路径导航:当充电需求被触发时,根据当前的实时信息计算不同优化目标的权重值,以综合目标函数F最小为路径规划目标,获取当前路段、节点、充电站、进站EV等信息,并计算交通路网各部分的路阻系数,通过路径引导策略为EV用户推荐行驶线路。当EV 到达充电站后更新同一时段内在站的EV 数量及其到站时间,在完成充电后重新将行驶地点更改为目的地,再次以出行时间最短为目标进行路径规划,直至完成此次行程。
2.4 基于分层规划的双向搜索LPA*算法流程
2.4.1 双向搜索LPA*算法
LPA*算法通过对以前的搜索结果信息再利用来实现高效搜索,达到无须重新计算整个图形而适应图形中变化的目的。对于任意节点x,LPA*算法使用二维启发式估价函数,如式(25)所示。
式中:k1(x)、k2(x)为代价函数;g(x)为从初始节点到任意节点x的代价;h(x,xgoal)为从节点x到目标节点xgoal的预估消耗代价;r(x)表示与节点x相连的节点到节点x的代价与其到节点x的权值之和的最小值。对于每一个与当前节点相连的节点x,先根据k1(x)排序,然后根据k2(x)排序,根据其中的较小值搜寻最优的路径节点。
双向搜索主要通过分别将起点和目标点作为初始节点,并以对方为目标节点进行路径搜索,直到二者的路径节点相交时完成搜索,以此来减少算法的搜索时间,实现快速响应的目的。
2.4.2 分层规划的思路
分层规划的思路如下:首先,根据道路的通行能力将快速路、主干路划分为高等级道路,将次干路、支路划分为低等级道路;然后,结合本文的规划目标函数与约束条件,对起点o、终点D之间的路网进行分块,分别将起点和终点作为搜索起点对与其相接近的高等级道路出入口节点进行第1 次路径搜索;最后,在高等级道路中搜索两节点之间的最优路径,得到起点和终点之间的最优路径。分层路网拓扑结果图见附录A 图A2。该思路结合城市路网的特点进行化整为零,可大幅减少道路的搜索量。
2.4.3 融合分层规划的双向搜索LPA*算法步骤
整个路径规划算法依托LPA*算法的实现,根据起点与终点之间的曼哈顿距离,若该距离不大于阈值,则直接采用LPA*算法,避免采用分层规划算法而导致的绕行问题;若该距离大于阈值,则采用分层规划对路网进行分层,并针对每层路网运行LPA*算法。具体算法步骤见附录B。
3 算例分析
3.1 算例信息
为了验证本文所提充电路径引导策略的可行性,根据地图API 以及天地图获取某市市区内165.6 km2区域内的实际交通路网数据,包括充电站地理数据、道路节点数据、路段数据、路况数据、道路等级数据等。对其拓扑处理并进行路网分层,其中包括11 座典型光储充电站、236 个节点与496 条道路。道路拓扑图见附录C 图C1。同时,为了匹配路网规模,针对11 座典型光储充电站(充电站1 —11),按照功能区域划分模拟4个IEEE 33节点网络,每个网络首端节点连接所在变电站(视为电源)。设置EV 渗透率为30 %,光伏、储能以及EV 出行和充电数据来自某市光储充电站2020 年的订单及调度数据。
3.2 算例结果
选取某一光照强度较好的工作日,模拟周期为24 h,时间间隔为15 min,即有96个时段。在每个时段开始时,EV 进入道路行驶,早上高峰时段07:00 —09:00 驶入的EV 数量最多,共有8 000 辆。首先,确定EV 电池的剩余电量是否满足行程规划需求,若Bt,e≤LrES,则确定EV 需要充电,并为其规划充电路径,否则根据道路路阻系数继续按最短行程时间规划行驶策略。
设置如下3 种方法对EV 的路径规划效果进行对比分析:①传统方法,仅考虑接受调度时刻的道路信息,选取最近的充电站进行调度,完成充电后同样以当前路阻最短规划路径,到达终点后记录实际通行时间和能耗;②本文方法,以综合路阻最小为目标,权重值均取1/3,选取充电站并进行调度,同时对规划后的路段和充电站数据进行监测,当波动超出阈值时,以EV 到达的下一节点为起点重新进行规划;③文献方法,根据充电站的运行状况,选择EV能够抵达的范围内对配电网影响最小的充电站进行充电[19],充电完成后以路阻最短对目的地进行规划。
3.2.1 单体EV引导效果分析
为了对比3 种方法优化EV 充电过程的效果,选择编号为6 326的EV进行分析,起点、终点位置分别为节点136 和节点55,出行时刻为09:15,当充电需求触发时选择不同方法下的最优充电站进行充电,并给出3 种方法的最优行驶路径,结果见附录C图C2。
3种方法的优化结果如表1所示。由表可知:传统方法以最近充电站点为目标,一方面没有考虑充电站的在站车辆数量,导致充电时间提高了28.12 %,另一方面所选充电站与目的地方向偏离,产生了绕行,导致行程长度提高了8.6 %;而文献方法优先选择较少EV 充电的充电站,充电时间最少,但路程中低等级道路占比较高,导致能耗较高,相较本文方法的优化效果不明显。

表1 3种方法的优化结果Table 1 Optimization results of three methods
此外,随机选取高峰时段08:00 — 10:00 内的500 辆EV,对比3 种方法的充电等待时间,如表2 所示。可以发现,本文方法需要充电的EV数量相比传统方法减少了4.27 %,长时间排队EV 占比也明显降低,可见本文方法显著提高了各充电站的充电效率,而文献方法的总体充电等待时间有所减短,但是由于未对充电路径进行优化,需要充电的EV数量减少不明显。

表2 3种方法的充电等待时间对比Table 2 Comparison of charging waiting time among three methods
3.2.2 交通侧的优化效果分析
3 种方法下各充电站的在站EV 数量对比如图2所示。由图可知,在出行高峰时段,3 种方法下均有部分充电站的在站EV数量超过其额定容量。其中:传统方法下有5 座充电站超出额定容量,且传统方法的在站EV 数量最高达到154 辆,超出了充电站额定容量的54 %;文献方法下有4 座充电站超出额定容量,而本文方法将平均越限量大幅降低的同时,超出额定容量的充电站数量降低至3 座。可见,采用最优方法时在站EV的时空分布更合理,充电设施资源的利用率更高。
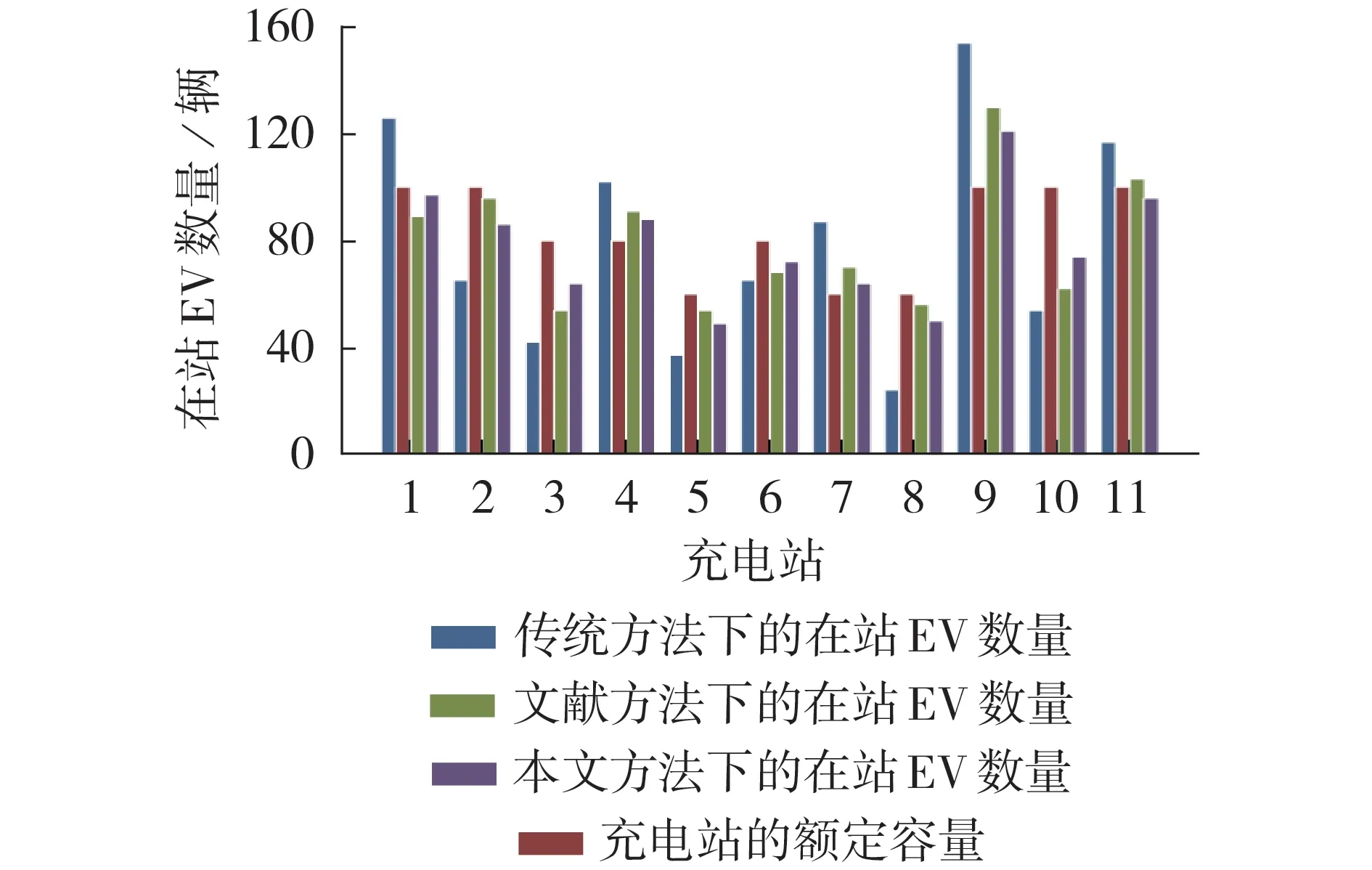
图2 3种方法的充电站在站EV数量对比Fig.2 Comparison of EV numbers at stations among three methods
引入道路饱和度Cij,t对充电站附近路段的拥堵情况进行分析,如式(26)所示。

图3 各充电站附近的道路饱和度对比Fig.3 Comparison of road saturation nearby each station
3.2.3 电力侧优化效果分析
为了分析本文所提充电路径引导策略对电网的优化效果,给出了3 种方法下各充电站一天内的用电负荷变化情况,如附录C 图C3 所示。由图可知,相比于传统方法,本文方法使得出行高峰时段充电站1、9 的负荷由原来的6.89、7.26 MW 分别降低至5.76、5.97 MW,各充电站的充电负荷分布更均衡,提高了区域内配电网整体的消纳能力,达到了削峰填谷的目的。相比于文献方法,本文方法的充电早高峰由原本的10:00 提早到08:00,更符合用户的出行规律,同时本文方法的高峰持续时段相比文献方法更短,更有利于配电网的安全运行。
附录C表C1给出了各充电节点所在的4个配电网的平均电压偏移率。可以看出,虽然文献方法和本文方法都有效降低了电压偏移率,但是由于本文方法最终参与充电调度的EV数量少于文献方法,本文方法的电压偏移率最小,能够有效地提高电网运行的稳定性。
为了验证本文方法能够提高区域内光伏、储能的消纳能力,对比一个工作日内3种方法下各充电站的光伏利用率以及第1 次峰时结束后的储能SOC,如图4 所示。可以发现,本文方法虽然减少了部分充电站的接待EV数量,但是提高了区域整体的光伏利用效率以及储能效益。
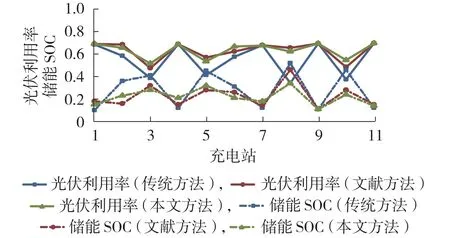
图4 光伏利用率与储能SOC对比Fig.4 Comparison of photovoltaic utilization rate and energy storage SOC
考虑到不同的充电站规模对应的建设成本不一致问题,以日充电收益率PR作为各充电站在不同方法下的经济效益,如式(27)所示。
式中:PT为充电站的日充电收入;PC为充电站的日用电成本;Cpv、CS、Cgrid分别为光伏的发电成本、储能的储电成本、充电站购电成本;Qev为EV 的总充电电量;Cch为单位电量EV充电服务费用。
3种方法下各充电站的日充电收益率PR结果如附录C 图C4 所示。可见,本文方法下部分充电站的日充电收益率有所降低,但区域内的整体收益较好,日充电收益率达到0.196,而传统方法、文献方法的日充电收益率分别为0.183、0.195。本文方法的日充电收益率较高是因为:在峰时段,相比直接从电网购电,充电站利用光储资源为EV充电获得的收益更高。本身已达承载负荷的充电站在完全消耗光储资源后,只能向电网购电,这使得充电站的收益大幅降低,本文方法通过提高区域内整体的光储利用率使得充电站总体的收益率增大。
3.2.4 算法性能对比
为了验证本文算法的运算效率,在相同的条件下以目标函数最小为目标将本文所提LPA*算法与传统A*算法和Dijkstra算法进行比较,并结合4种不同的计算规模案例,从计算速度、计算过程中的标记节点数量方面进行对比,结果如表3 所示。可以看出,在计算复杂度上:Dijkstra 算法作为广度优先算法,其标记的永久节点与临时节点均最多;而传统A*算法利用启发式估价函数在小范围内搜索,大幅减少了节点的遍历数量,但是在大范围内搜索的节点数量接近Dijkstra 算法;而本文的LPA*算法使用分层规划的思想,通过化整为零将大路网转化为多个小路网进行搜索,大幅降低了标记节点数量。
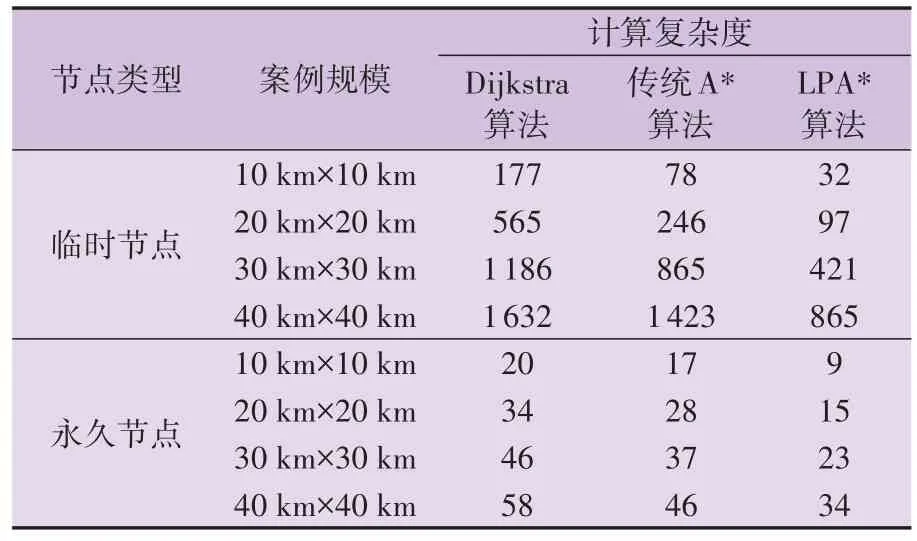
表3 计算复杂度对比Table 3 Comparison of computational complexity
算法的运算时间对比如图5 所示。可见,在算法运算效率上,3 种算法在小路网的运算时间差别不大,随着案例规模增大,传统A*算法与Dijkstra 算法所需搜索的节点大幅增加,导致运算时间激增,而LPA*算法由于采用了双向搜索的思维,使得单位时间内算法的节点搜索数量增多,此外分层路网规划方法大幅降低了节点标记数量,减轻了搜索复杂度。
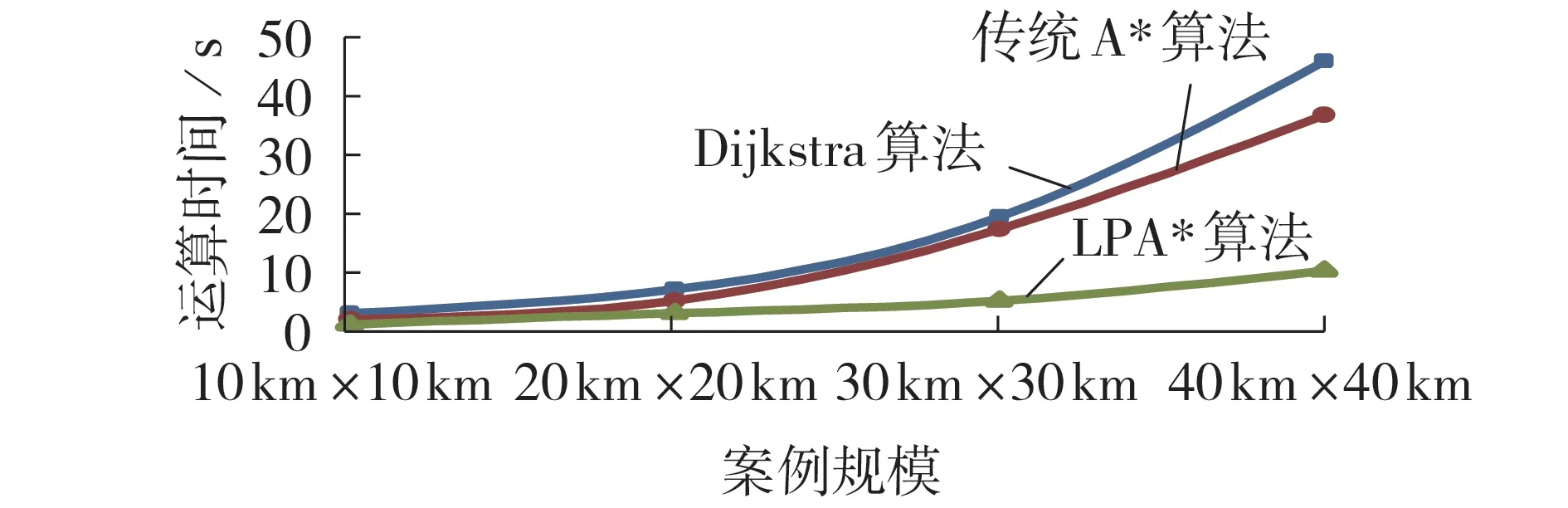
图5 算法的运算时间对比Fig.5 Comparison of algorithm operation time
由此可见,本文采用的基于分层规划的双向搜索LPA*算法具有较好的性能,能够有效地降低计算复杂度并提高运算效率。
4 结论
本文提出了一种融合动态地理以及能源信息的光储充电站EV充电路径引导方法,并以某市一区域路网以及IEEE 33 节点配电网为算例,对比验证了所提方法的有效性,所得主要结论如下:
1)本文所提路径引导算法在规划导航的同时,能综合考虑道路交通状况与充电站的运行情况,有效避免高峰时段EV 集群充电需求带来的充电站周围路段拥堵问题,局部改善路网的运行状况;
2)本文所提基于光储充电站的控制策略在充分考虑光储系统运行情况的同时,充分调度区域内各充电站的负荷消纳能力,提高了EV的充电效率以及充电站的经济性、适应性,保证了配电网的运行稳定性和安全性;
3)本文所提基于分层规划的双向搜索LPA*算法根据道路等级以及路网的实时情况进行修正,在复杂路网模型中大幅减少了运算时间,加快了搜索速度。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
小学生作文·小学低年级适用(2024年4期)2024-05-23 17:59:55
工会博览(2022年5期)2022-06-30 05:30:18
中国交通信息化(2021年2期)2021-07-22 07:34:40
IEEE/CAA Journal of Automatica Sinica(2021年2期)2021-04-22 03:54:26
环球时报(2020-12-08)2020-12-08 05:17:49
房地产导刊(2020年6期)2020-07-25 01:31:26
建材发展导向(2019年11期)2019-08-24 06:34:56
环球飞行(2018年7期)2018-06-27 07:25:54
中国公路(2017年11期)2017-07-31 17:56:30
中国公路(2017年7期)2017-07-24 13:56:29