
消毒喷雾智能机器人设计及效果研究
2024-03-01 00:33:32谢箐董丽娟中山市中医院广东中山528401
中国医疗器械信息 2024年1期
谢箐 董丽娟 中山市中医院 (广东 中山 528401)
内容提要: 目的:针对当前公共卫生领域的消毒机器人具有成本高、场景限制、控制因素复杂等问题,设计一款集合人工智能技术和机器人技术的智能消毒喷雾机器人。方法:结合自主导航、自主路径规划、全局定位、自动避障、自动回充等人工智能技术及雾化消毒的医疗技术,构建具备以上功能的智能消毒喷雾机器人。并开展其对白色葡萄球菌和空气自然菌的消毒试验研究。结果:经过测试该机器人的消毒效果,空气中白色葡萄球菌杀灭率的检测结果>99.90%,空气中自然菌消亡率的检测结果>90%,均属于消毒合格。通过创新改进各模块功能,该机器人能在多种场所自动、高效、精准、安全地执行消毒灭菌作业,结论:该机器人具有操作便利,自动化程度高,场景应用丰富,消毒效果突出,安全性高等特点。
机器人的研发、制造和应用是衡量一个国家科技创新,高端制造水平以及综合国力的重要标志,我国于2015年发布了《中国制造2025》,明确指出需加快下一代机器人技术研发,抢占机器人技术及产业发展的下一个制高点。新型冠状病毒肺炎疫情蔓延全球时,对全世界的安全和经济等领域造成了持久而具有挑战性的破坏。而机器人技术的有效使用和创新发展可以在区域或全球范围内减轻感染风险和恢复正常的社会和经济活动方面发挥重要作用[1,2]。工信部发布《充分发挥人工智能赋能效用协力抗击新型冠状病毒感染的肺炎疫情倡议书》[3],推动智能机器人在医疗、消毒、配送等防疫领域的发展和应用,成为防疫战斗中的重要力量。随着智能技术的迅速发展,机器人的研发和应用数量逐步提升,但公共卫生领域消毒机器人的研究和开发效率一直受机器人平台成本高、应用场景多变、控制方法复杂等因素限制[4]。针对目前同类智能消毒机器人功能相对单一,价格昂贵,关键零部件生产工序繁琐,加工难度大,维修成本高等问题,本研究中进一步优化自主导航系统和雾化喷雾系统的设计,具体包括路径规划及避障算法的优化以及过氧化氢空间灭菌喷雾器的控制优化等内容,进一步降低系统整体能耗和成本,更好地实现了隔离区域内机器人的室内外自主移动以及主动杀菌防护功能。现将消毒喷雾机器人具体内容介绍如下。
1.1 总体设计方案简述及相关核心设备
本文设计的消毒喷雾机器人由硬件和软件组成,硬件包括10.1寸屏幕、监控摄像头、激光传感器、超声波传感器、深度相机、红外探头等部件(详细参数见表1),这些硬件相互组成了消毒喷雾系统、自动定位、自主导航等功能模块(见图1)。软件是基于ROS主操作系统上二次开发的,在设计导航系统时,主要使用到了ROS的三个工具包:movebase、gmapping和amcl。其中,move-base包用于让机器人在指定的框架内移动到目标位置;gmapping包用于将从视觉传感器采集到的数据来绘制地图;amcl包用于在当前地图内定位机器人。用户端包括安装在消毒机器人上的触摸屏以及手机端小程序,用户端操作系统为安卓7.1。该款消毒喷雾机器人可通过机器人内部装置的消毒系统及硬件设备,对地面及室内空气进行消毒。能够根据设定的路线或地点自动并高效、精准地进行消毒灭菌作业,并具备自动运行,自动回充以及运行状态提醒等功能。

图1.消毒喷雾机器人组件

表1.设备参数说明
1.2 操作路径
机器人操作人员首先启动消毒机器人,内置操作系统随即自动启动,并自动连接4G网络。首先,操作人员通过机器人触摸屏或者手机小程序交互界面设置消毒任务,即设置消毒定点、停留时间、播报内容、消毒状态等。之后通过定点导航,机器人自动前行至指定地点通过消毒雾化系统均匀喷洒消毒液,完成后再进入下一指定区域逐个完成消毒任务,消毒机器人能有效自主避障,并自主乘梯完成多个楼层的消毒任务,在完成或低电时,可自动返回充电桩完成充电。
2.关键模块及技术设计
2.1 自主导航
机器人导航方法步骤如下:获取机器人的目标位置信息及其当前方向的二维点分布;根据获取到的机器人当前方向的二维点分布,确定机器人的多维特征值s;根据确定的机器人的多维特征值s、以及通过机器学习方法得到的θ值,利用模型a=f(s,θ)计算机器人的控制信号a;根据计算的机器人的控制信号a,实现机器人的导航(见图2)。该导航方法可以有效解决机器人局部导航问题且运行流畅,与现有算法比较其效率有所提升。
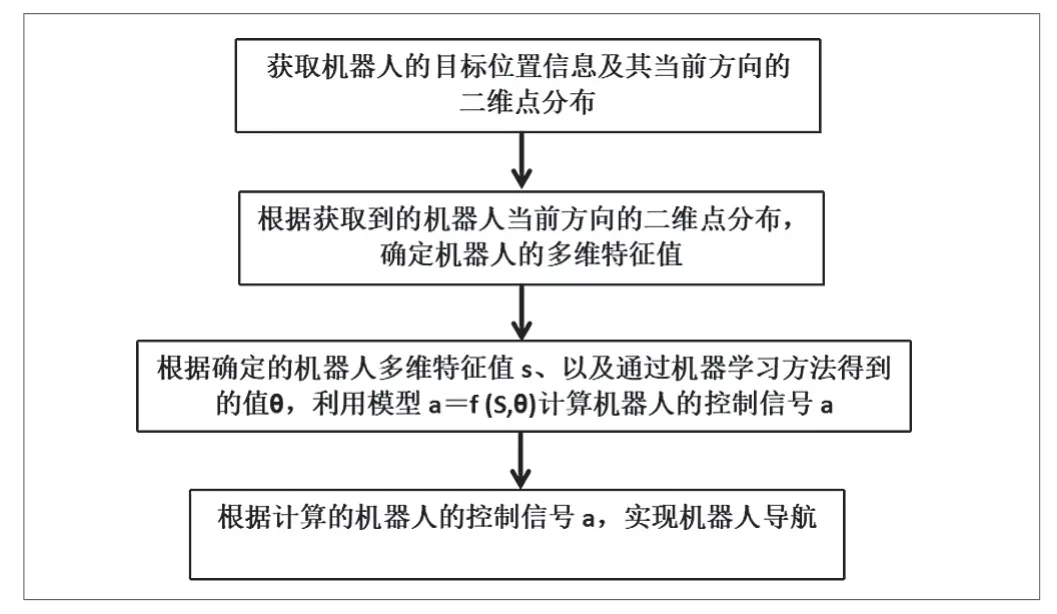
图2.机器人导航方法
2.2 全局自定位技术
消毒雾化机器人创新全局自定位技术,其步骤如下:首先获取启动全局自定位的请求;并对机器人当前加载的地图进行预处理;获取机器人底盘上的激光雷达数据,并根据激光雷达数据剔除不符合要求的数据,以得到有效数据;并运用有效数据以及预处理后的地图生成概率分布地图;计算所述概率分布地图内概率最大的像素值,并将所述像素值转换为坐标值,以得到机器人的位置。通过全局自定位技术可以无须增加传感器等硬件,实现低成本地提高机器人的定位准确率。
2.3 新型的液体雾化喷雾系统
消毒雾化机器人采用新型设计的液体雾化喷雾系统,其工作原理如下:工作开始时,水箱中的液体使用进水组件经过进水口进入雾化箱内,液位感应组件感应到液位可以开始工作时,控制器给出命令使雾化组件开始工作,产生出水雾,并持续运转形成物理气压差,使水雾经过喷雾口高速喷出,实现在工作状态下持续喷雾。工作中,液体通过进水组件持续不断送入雾化箱中,当液位到一定程度,通过排水组件将液体排出到水箱中。当排水系统排水力度不够,液位再继续上升,液位感应组件感应到液位到达最高点,控制器给出命令给进水组件停止工作,当液位感应组件感应到液位到达工作液位最低点,控制器给出命令至进水组件,开始抽液。
3.智能消毒喷雾机器人的效果研究
3.1 对白色葡萄球菌的消毒试验研究
试验于2021年8月24~2021年8月30日进行。将有效含量为0.174g/L的次氯酸消毒液加入样机中,启动样机,开启消毒喷雾,按10mL/m3喷量,雾化10min,共雾化200mL到20m3试验空间内,作用60min后在六级采样器中装入培养基平板,在相同位置对空间的空气进行采样。采样时将空气微生物采样器放置于柜室中央1m高处,设置一个点采样,以28.3L/min的抽风量进行采样。对照组在开始60min后分别进行两次采样,处理对照组采样时间为30s,处理观察组采样时间为5min,试验重复3次,采样后平板在37.0°C培养48h。
3.2 对空气自然菌的消毒试验研究
试验于2021年8月24至2021年9月13日进行。将有效含量为0.174g/L的次氯酸消毒液加入样机中,启动样机,开启消毒喷雾,按10mL/m3喷量,雾化15min,共雾化300mL到30m3试验空间内,作用60min后在六级采样器中装入培养基平板,在相同的采样点位置对空间的空气进行采样。采样时将BY-300空气微生物采样器放置在中央1.0m高处,设置1个点采样,以28.3L/min的流量进行采样,采样时间为5min,试验重复3次。用营养琼脂(NA)于36.0°C培养48h。
3.3 试验结果
经过消毒试验,结果显示白色葡萄球菌的消灭率分别为99.91%,99.92%,99.90%。见表1。
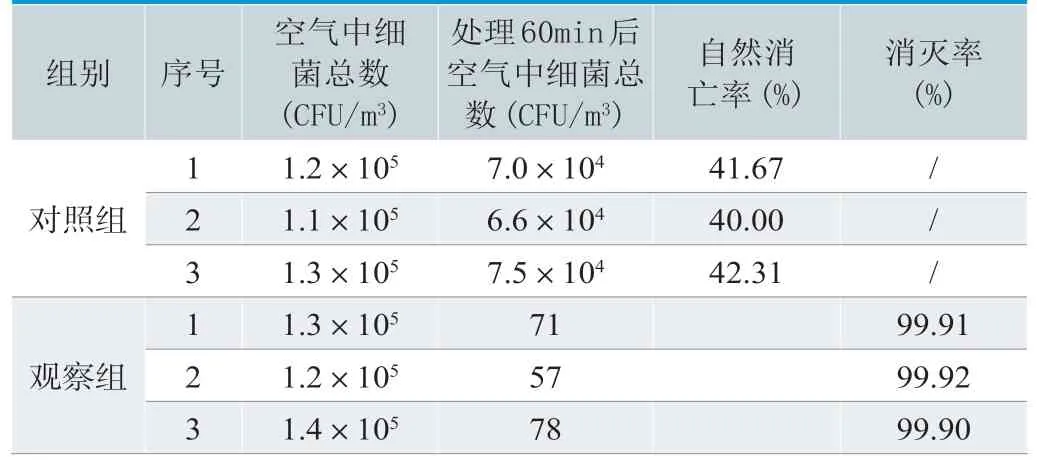
表1.对白色葡萄球菌的消毒效果
经过消毒试验,结果显示空气自然菌的消亡率分别为90.71%,92.50%,91.74%。见表2。

表2.对空气自然菌的消毒效果
3.4 结论
空气中白色葡萄球菌杀灭率的检测结果>99.90%,符合《消毒技术规范》2002年版-2.1.3.4标准要求(杀灭率均≥99.90%),为消毒合格。空气中自然菌消亡率的检测结果>90%,符合《消毒技术规范》2002年版-2.1.3.5标准要求(自然菌消亡率均≥90%),为消毒合格。
4.讨论
4.1 良好的自动化和避障性能,具备多场景的适应性
消毒机器人需要适应多样化的工作环境。不同于多数机器人在实施区域的局限性,本研究的机器人创新改进自主导航方法,优化现有算法,使效率有效提升。同类多数机器人通常需要建立局部地图并且重新规划路径。然而获取精准的局部地图比较困难。本研究中的消毒喷雾机器人改进了路径规划方法,使得不需要增加额外传感器,能够使机器人绕开禁行区域,同时增加禁行地图图层不会对原来的定位系统有影响,保持了原有的定位精度。消毒喷雾机器人以其激光导航,自动运行等功能,可以在设定路线上自动化执行消毒任务,有效节省时间和人力;平时凭借强大的自由避障和自主乘梯的功能,具备在多楼层等复杂场景的应用条件,显著扩大了机器人常规应用范围。当电力不足时,机器人能够快速及时地搜寻并自动返回充电桩,自主完成充电任务,不仅提升了使用的便利性,而且有助于延长工作时间,提升工作效率。
4.2 具有显著的消毒效果
本文中的消毒喷雾机器人可以在有人或无人的环境下通过均匀喷洒及雾化消毒液,自动化完成地面消毒以及空气消毒,既有效节省人为劳动,又有效避免了操作人员和被污染物品的接触,从而降低感染风险。在效果试验中,本文中的消毒喷雾机器人采用过氧化氢或次氯酸予以喷雾消毒,在金黄色葡萄球菌和空气菌落的消毒试验中均显示出显著的消毒效果,体现出消毒喷雾机器人具有良好的消毒效果以及更好的稳定性。研究表明,次氯酸能快速有效地杀灭细菌,相比物表消毒,雾化次氯酸能更快地杀灭空气中的微生物,金黄色葡萄球菌、枯草杆菌黑色变种孢分别在消毒3min、5min后灭菌率也达到了100%[5]。而在已有多项动物研究证明,100~1000mg/L的次氯酸对动物皮肤黏膜、眼部、血液、生长发育等方面无明显影响,表明次氯酸消毒的安全性[6]。在使用化学消毒剂的机器人研发方面也取得了一定进展,比如开发了一个人工智能框架,用于通过人工支持机器人(HSR)自动化清洁任务,目标是门把手等高接触区域[7]。还开发了具有智能消毒模式的消毒机器人[8]。本文中的消毒雾化机器人可以实现在有人和无人的环境中开展自动化,高效化,安全化的空气和地面消毒作业。
4.3 应用的局限性
消毒雾化机器人在应用技术上仍存在一定局限性,如无法对消毒面积进行自动感应和测算所需消毒液剂量,因此在升级过程中需要进一步改进感应技术和数据分析技术等,实现空间面积和对应消毒液剂量和浓度的智能测算。
4.4 小结
消毒雾化机器人以其自主导航,智能避障和高效的雾化系统等技术特点,能够在多场景下实施高效,精准,安全的全自动化消毒工作。因此,相比于传统的人工消毒,消毒雾化机器人在消毒效果,便捷性,人力和物质成本,避免人员感染等方面具备更突出的优势。
猜你喜欢
小学时代·科学小问号(2024年10期)2024-10-31 00:00:00
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:34
中国洗涤用品工业(2022年6期)2022-07-07 05:13:34
天津大学学报(自然科学与工程技术版)(2022年9期)2022-07-04 09:15:46
沈阳农业大学学报(2022年6期)2022-03-26 07:52:24
好日子(2021年8期)2021-11-04 09:02:46
故事作文·高年级(2021年5期)2021-06-01 06:50:22
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
中学课程辅导·教学研究(2017年21期)2017-11-14 18:56:41
