船舶甲板抛丸机器人系统设计
2024-02-29 06:23:38韩子延
造船技术 2024年1期
韩子延, 王 晶, 王 跃
(江苏自动化研究所,江苏 连云港 222006)
0 引 言
当前,抛丸机广泛用于船舶、机场、桥梁和公路等场所进行除锈除漆、焊缝清理、跑道清理、桥面处理和路面处理等工作。现有抛丸机操作不方便,需要人工牵引,噪声大、粉尘重,并存在丸料崩裂伤人的风险[1-6]。随着人力成本和环保要求的提高,抛丸机器人系统成为机器人领域的重要研究方向[7-8]。
抛丸作业工作原理:利用两个抛丸电机驱动两个抛丸轮在高速旋转过程中产生的离心力,将定向的丸料沿叶片的长度方向不断加速运动直至抛出,抛出的弹丸形成一定的扇形流束,冲击工作平面,起到清理强化的作用;弹丸与灰尘、杂质一起经反弹室至储料箱上方[9-11];通过储料箱上方的沙尘分离器将丸料与灰尘分离,丸料进入储料斗继续循环使用,灰尘则通过回收软管进入除尘装置。
抛丸机器人系统功能:可实现抛丸和除尘作业的自动化;可控制抛丸作业的移动方向和速度,达到不同等级的清理效果;直线行走最大速度不小于50.0 m/min,上下坡能力不小于7°;以遥控方式为主,辅助自主导引控制,可自动检测车体周围的障碍物;通过辅助机构可越过一定高度障碍物。
从抛丸工艺和实际使用需求出发,以减少人工数量和环境危害为目的,融合电机驱动技术、安全保护技术、远程遥控技术、无线定位技术和抛丸工艺,设计抛丸装置集成、移动机构和控制系统软硬件等内容,实现一种可手动遥控或自动作业的船舶甲板抛丸机器人系统。
1 结构组成
为减少研制周期,抛丸机器人系统集成现有抛丸装置以实现钢板表面或路面清理、多种磨料适应、丸料与灰尘分离和废料收集等功能。抛丸机器人系统由进行抛丸作业的抛丸分系统、用于粉尘与丸料回收的除尘分系统和便于设备越障的越障辅助机构组成,抛丸分系统和除尘分系统之间通过回收软管与电缆连接。
1.1 抛丸分系统
配置防护罩的激光导航扫描仪将实时扫描的点云图传输至控制器进行分析以实现分系统的定位和导航功能;动力箱用于分系统的动力分配和监控;控制箱用于分系统的行走电机、抛丸电机、传感器、开关和指示灯等部件状态的接收和控制;举升机构1用于抬起前方抛丸口和处于失电状态的人工移动分系统;舵轮带动分系统前进、后退和转弯;防撞传感器监视前方障碍物距离;料位检测传感器用于提示储料箱内的磨料料位;抛丸电机通过皮带带动抛丸轮将磨料加速抛出;丸料阀用于控制丸料进入抛丸轮;举升机构2配置撬棍抬起后方抛丸口,抛丸口配置磁性封条和毛刷以提高抛丸加工密封效果。抛丸分系统结构如图1所示。
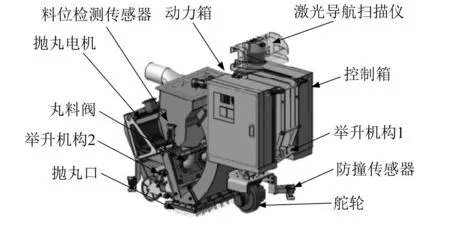
图1 抛丸分系统结构
1.2 除尘分系统
除尘箱内的除尘滤筒过滤带有灰尘的空气;废料箱收集废料;空气压缩机及其储气罐生成压缩空气,用于冲掉除尘滤筒上的灰尘;动力箱用于分系统的动力分配和监控;控制箱用于分系统的行走电机、除尘电机、传感器、开关和指示灯等部件状态的接收和控制;避障传感器用于分系统的避障;除尘电机提供用于形成除尘所需负压的动力;舵轮带动分系统前进、后退和转弯;防倾倒轮用于防止转弯半径较小且速度较快时的分系统倾覆。除尘分系统结构如图2所示。
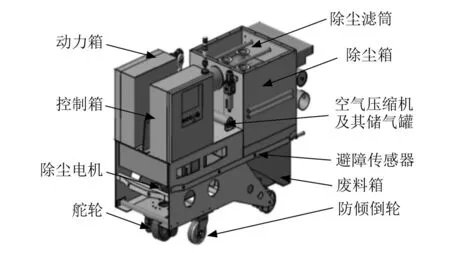
图2 除尘分系统结构
2 控制系统
甲板抛丸机器人系统自主完成工作需要一套完善的控制系统,使信息可及时顺畅地流通,使其各功能模块合理使用。控制器分为抛丸装置控制器和除尘装置控制器,各分系统以各自的控制器为核心,控制器之间通过局域网(Local Area Network,LAN)链接,各分系统内部通过LAN和控制器局域网(Controller Area Network,CAN)链接;通过数字输入(Digital Input,DI)/数字输出(Digital Output,DO)接口进行外部按钮开关信号采集和报警灯控制;通过数据分析处理实现定位和路径规划功能;通过输入/输出(Input/Output,I/O)接口接收信号,实现防碰撞功能,实现灵活的行走、转向和控制。抛丸机器人系统控制框图如图3所示。
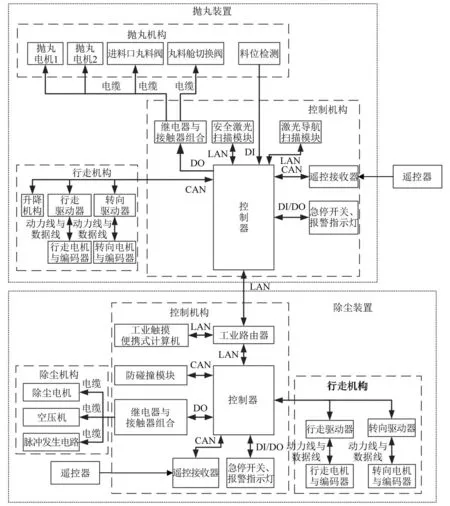
图3 抛丸机器人系统控制框图
控制器通过LAN总线接收来自本地的人机交互(Human Machine Interaction,HMI)程序更新或地图数据下载任务;通过DI/DO接口进行外部按钮开关信号采集和报警灯控制;通过LAN总线进行分系统之间的信息交互。抛丸装置控制器通过I/O接口接收来自避障传感器的信号,实现抛丸分系统的防碰撞功能;通过CAN总线接收来自遥控接收器的移动指令,对动作逻辑进行判断,将最终的控制指令通过CAN总线发送至电机驱动器以驱动伺服电机运动,控制抛丸分系统的行走和转向。除尘装置控制器通过CAN总线接收来自超声雷达的信息,实现除尘分系统的防碰撞功能。
3 软件设计
按系统硬件结构及其工艺设计要求,软件设置多个相对独立的任务模块。各模块之间按严格定义的接口规范相互传递信息。各模块相对独立的设计风格可有效保证在系统器件或工艺要求变动时,对控制软件的影响均为局部、集中且单一的。软件模块架构如图4所示。
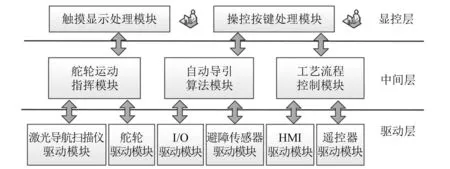
图4 软件模块架构
驱动层进行与硬件的信息交互。激光导航扫描仪驱动模块收集激光雷达采集的距离和角度信息,通过算法将距离和角度信息解算为位置信息;舵轮驱动模块为电机运动控制的驱动模块,具有伺服驱动通信、控制指令解析、安全保护和故障处理等功能;I/O驱动模块包括CAN、DI/DO和LAN等所有需要使用接口的驱动程序;避障传感器驱动模块在检测到设定区域内出现障碍时触发避障事件,根据预设的避障逻辑和避障方式进行避障,可采取多种避障方式,例如停车、掉头、左转前进并入原轨迹和右转前进并入原轨迹等;HMI驱动模块提供HMI硬件设备的驱动;遥控器驱动模块进行遥控器上的按键与显示状态的CAN通信协议转换。
中间层进行机器人系统移动和工艺流程的信息处理与下发。舵轮运动指挥模块根据接收的运行参数下发运动指令,监控系统位置反馈信号,确保系统按既定的位置和速度要求执行相应的运动指令;自动导引算法模块接收位置信息,运用导引算法,根据在地图中预设的轨迹实现定位和导航;工艺流程控制模块根据接收的工艺设备运行参数运行各工艺设备,遵循工艺设备各组成模块的运行流程和工序对应各DI/DO接口,控制工艺设备的运行。
显控层进行HMI的信息处理。触摸显示处理模块解析触控信息和显示抛丸状态信息,对操控输入的响应级别较低;操控按键处理模块解析按键信息并下发运行参数,对操控输入的响应级别较高。
上位机软件系统通过C#编写,登录界面由5部分组成:设计软件;参数配置软件;导航设计软件;地图管理软件;避障传感器标定软件。主界面显示自动导航、抛丸遥控和除尘遥控的状态;显示抛丸舵轮与除尘舵轮的速度;监控除尘接触器、空压接触器、抛丸机接触器1、抛丸机接触器2、丸料舱和丸料阀的状态;设置导航的启动按钮、暂停按钮与取消任务按钮。
4 激光导引规划工作流程
在完成设计软硬件后需要进行激光导引规划。在抛丸作业前,在作业区域布置足够的反光柱,确保在作业区域内的任何位置上抛丸分系统的激光导航扫描仪至少可测得4条光束。遥控抛丸分系统沿作业区域行走一圈,并打开建图软件,通过激光导航扫描仪获得各反光柱或特征点的位置。基于反光柱或特征点的位置,在工业便携式计算机上建立导航图形,设定运动参数,设计抛丸作业区域,标记危险禁行区域,指定工作路线。在对抛丸作业进行导航时,控制器根据抛丸分系统当前的运行速度、转向角度和间隔时间等参数对下一位置进行估算,依据计算得到的新位置确定关联的反光柱或特征点,分析下一步运动。在遇到预设的障碍时,抛丸分系统会按预设的避障/绕障逻辑行驶。激光导引规划工作流程如图5所示。
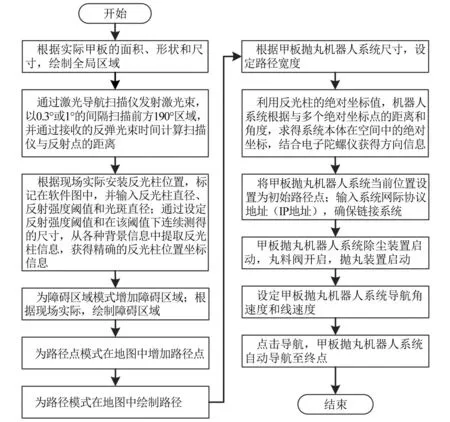
图5 激光导引规划工作流程
5 实船试验
为验证甲板抛丸机器人系统有效性,根据系统设计方案,制造实物样机,分别将S390钢丸、S330钢丸和S330钢丸+G25钢砂导入丸料舱,并在某船厂现场进行实船除锈除漆测试。
将速度分别调节为1.2 m/min、2.0 m/min、2.4 m/min、3.6 m/min、5.0 m/min 和6.0 m/min,以达到不同的清理效果。以S390钢丸为例,在行走速度为1.2 m/min时除锈等级为Sa 2.5,完全达到喷砂除锈清洁等级(白亮、无可见锈点);在行走速度为2.0 m/min和2.4 m/min时除锈等级为Sa 2,无明显可见锈蚀;在行走速度为3.6 m/min和5.0 m/min时除锈等级为Sa 1,相当于扫砂、拉毛的效果。船舶分段甲板抛丸测试表如表1所示。除锈等级对照图如图6所示。
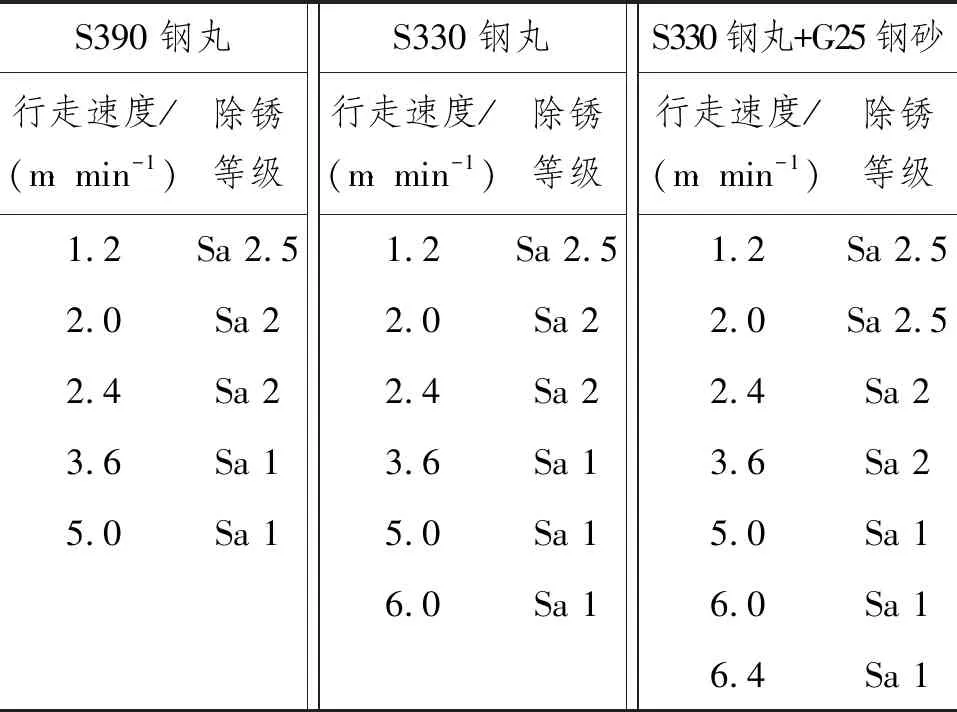
表1 船舶分段甲板抛丸测试表
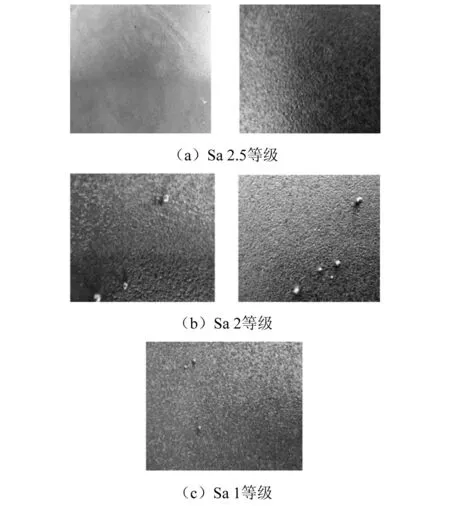
图6 除锈等级对照图
试验证明,甲板抛丸机器人系统可实现抛丸和除尘移动作业的自动化,以较高效率实现船舶甲板表面清洗,并具备一定的自主导引抛丸作业功能。焊缝抛丸效果较为理想,如图7所示。

图7 焊缝抛丸效果
6 结 语
甲板抛丸机器人系统便于形成实际应用。经试验验证,该系统不需要人工牵引,可减少设备对操作人员的噪声和粉尘污染,便于实现抛丸作业的自动化。根据不同的施工环境特点,该系统具备远程遥控和导引规划两种操作方式,但导引规划采用激光导引,需要进行大量外部环境光噪声影响测试,以对稳定性进行验证。该系统可用于大型船舶货舱底部和甲板焊缝区域的除锈除漆,并可向桥梁、机场和高速公路等维护施工作业推广。
猜你喜欢
选煤技术(2021年3期)2021-10-13 07:33:30
装备制造技术(2021年2期)2021-07-21 05:38:46
冶金设备(2021年1期)2021-06-09 09:35:40
广东交通职业技术学院学报(2020年4期)2021-01-21 07:37:44
石材(2020年10期)2021-01-08 09:19:56
船舶标准化工程师(2020年1期)2020-06-12 09:16:34
中国铸造装备与技术(2017年3期)2017-06-21 11:33:46
中国铸造装备与技术(2017年3期)2017-06-21 11:33:43
国防(2017年12期)2017-04-09 07:52:09
反射疗法与康复医学(2017年7期)2017-01-16 01:11:18