基于连续下降运行的终端区环形进场航线设计
2024-02-29 06:29:28程骁丁
科学技术与工程 2024年4期
程骁丁
(中国民航技术装备有限责任公司, 北京 100027)
多机场系统(multi-airport system, MAS)指某一区域内存在两个及以上彼此靠近且同时运行的商业机场,并由同一终端空域管制单位提供服务的系统。多机场终端区内密集的机场分布导致其运行关联性较强。受当前空中交通管理(air traffic management, ATM)模式和航空器导航设备性能限制,各机场的进离场时隙配置尚未得到统一有效的管理,且各机场的进离场航空器需使用终端区空域公共进出口点和进离场航段,因此区域内关键位置的运行态势繁忙且复杂,成为限制终端区容量和运行效率的重要瓶颈。
针对此问题,学者们的研究方向集中于终端区空域结构-进离场航线设计、交通流分析、运行状态评估与容量预测等。由于进场航空器在运行过程中机动性较大,且具有更高的随机性和时变性,因此普遍将进场航空器作为主要调整对象。在空域结构分析方面,Murca等[1-2]选择全球范围内数个多机场系统,根据航空器历史航迹数据,利用机器学习方法评估各MAS在空域结构、容量和运行效率等方面的差异,以此为复杂空域的容量规划提供决策支持。在交通流分析方面,刘继新等[3]提出了基于密度峰值的终端区航迹聚类与异常识别方法。孙淑光等[4]提出了基于高程异常补偿的飞机终端区组合导航高度优化方法。Carmona等[5]基于复杂系统的思想,通过比较标准进离场航线与航空器实际运行轨迹之间的差异,分析终端区空域的运行效能和延误原因。在运行状态评估与容量预测方面,Wang等[6]基于实时气象信息、机场跑道运行配置和历史航迹数据,提出了一种数据驱动的深度学习框架,用于预测MAS中各机场的机场接受率,以此支持终端区内的交通流管理。张金鹏等[7]基于航迹分类方法研究了终端区交通流非线性特征。
上述学者的研究对象多为当前技术和运行规则下的终端区空域。随着空中交通管制理念和通信、导航、监视技术的不断发展,尤其以终端区连续下降运行(continuous descending operation, CDO)为代表的进场航空器自主运行模式的提出与逐步应用,为解决相关问题提供了新的思路。
以自由航路空域(free route airspace, FRA)和基于航迹运行(trajectory based operation, TBO)为背景的航空器自主运行模式和机载分布式ATM系统不断投入使用,使得航空器对所在空域的运行态势感知能力大大增强[8]。全球导航卫星系统(global navigation satellite system, GNSS)和地基(导航)增强系统(ground-based augmentation system, GBAS)为航空器执行CDO模式提供了导航支持[9],执行CDO模式的进场航空器将不必依赖地面导航台指引并遵循固定航路运行。其进场程序将与当前运行模式有较大差异,当前的终端区划分和运行规则较为刚性,不利于充分发挥CDO模式的灵活性[10]。
在此技术背景下,学者们开展了大量研究。Toratani等[11]提出一种由飞行控制系统与地面管制员协商控制的固定梯度角下降(fixed flight-path angle, Fixed-FPA)技术。Saez等[12]提出一种“长号(Trombone)形状”的区域导航进近程序。杨磊等[10]设计了一种点融合(point merge, PM)理念引导的倒皇冠形进场空域结构,并规范了该空域内航空器运行程序。向征等[13]提出了基于多目标融合及改进遗传算法的终端区进场协同排序方法。上述学者有关CDO模式的研究对象多为单一机场。针对多机场终端区CDO模式的研究相对较少,多机场终端区CDO模式运行的研究仍处于发展阶段。
综上所述,在当前运行模式下,终端区内交通流时空分布不均,空域结构和航线设计无法完全满足航空运输需求,已成为限制空域容量和航空器运行效率的关键因素。随着CDO模式不断实行,进场航空器的运行管理将更为灵活。为了提高多机场终端区的航空器进场效率,提高终端区容量,基于前人研究,设计一种应用于多机场系统的终端区环形进场航线,将各机场的进场航空器纳入统一管理中,并包容从各方向进入终端区的进场航空器,对其进行时空疏解以避免聚集;以环形进场航线为基础,为不同运行态势下进入终端区的航空器设计相应的运行程序;建立航空器进场顺序优化模型,以提高空域内进场航空器运行效率;使用实际扇区结构数据和航空器运行数据进行仿真模拟,并与实际情况进行对比评价。
1 终端区环形进场航线设计
基于目前普遍应用的终端区空域结构和进离场航线设计,结合终端区内各机场的空间分布,设计一种基于航空器自主运行和连续下降运行模式的终端区环形进场航线,如图1所示。
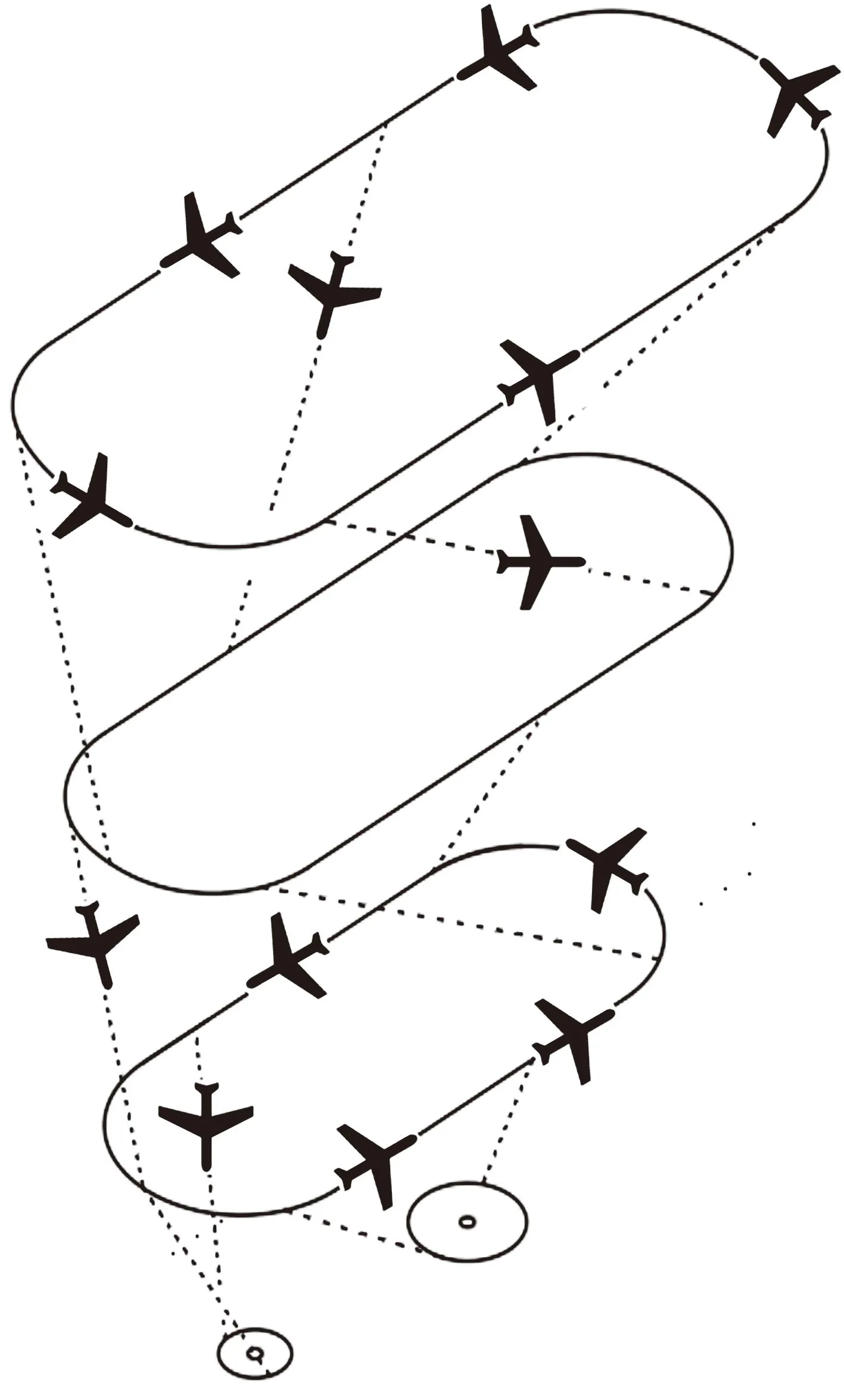
图1 终端区环形进场航线运行模拟示意图Fig.1 Schematic diagram of loop approach route in terminal area
如图1所示,环形进场航线由椭圆矩形进场等待航线和圆形进场准备航线组成,各航线的划设位置、长度、间隔等由该终端区的实际运行条件决定,并满足航空器管制规则要求。圆形进场准备航线仅设置一层,其位置与对应的机场位置直接相关,圆心位于机场基准点;椭圆矩形等待航线将包容终端区内各机场的圆形准备航线,并可根据不同终端区的空域构型和障碍物分布等因素设置不同层数。执行连续下降运行模式的各进场航空器在进入终端区后,将根据当前终端区的空域运行态势和机场繁忙程度,沿椭圆矩形等待航线绕飞,并按顺序逐层下降高度,由外层进入内层,最终进入圆形进场准备航线,调整几何构型完成进场准备工作后降落。
1.1 圆形进场准备航线
圆形进场准备航线以机场基准点为圆心,根据其空域结构设计、障碍物分布、飞行性能要求等设定航线半径和高度。即将进场的航空器在该航线上保持足够水平间隔、沿逆时针方向依次绕飞,调整飞机构型并完成降落准备工作,根据管制员及机载分布式ATM系统指令适时飞向最后进近定位点(final approach fix, FAF)并完成降落。由于执行连续下降运行模式的航空器具备一定的自主运行能力,不必受到固定进场航线的严格约束,其接收降落许可后,由圆形准备航线上任意位置直飞FAF点即可。因此环形航线中的航空器无需对其空间顺序进行严格编排。某架航空器离开圆形航线后,最内层等待航线运行的航空器亦可按其进入的时间顺序依次填补空位,在空间中不必重新排序,降低了管制员工作负荷和航空器冲突风险。
1.2 椭圆矩形等待航线
单一的椭圆矩形等待航线由两条直线边和两个半圆形转弯边组成,直线长度和半圆形半径由当前终端区空域结构和预期容量等决定。等待航线可由外至内、由高至低设置多条,以此稀释整理进场航空器。低层航线在高层航线的内侧下方,垂直和水平间隔根据空域结构和运行间隔标准确定。
进入等待航线的航空器将沿逆时针方向运行,并依据进入时间和目的地机场运行态势等因素,按序待内层航线出现空位后逐级下降递补,直至进入圆形准备航线后降落。同一等待航线的航空器将以相同的速度沿逆时针方向运行,并保持水平间隔。不同层等待航线的容量和运行速度不同,受航线长度和航空器进场运行趋势限制,内层航线容量更小,航速更低。
1.3 终端区环形进场运行特点
(1)终端区内各机场的进场航空器将由同一管制单位指挥,并共享同一组椭圆矩形等待航线,以此整合各机场各方向的进场交通流;各机场的圆形准备航线独立运行,航线间保持一定的间隔以避免航空器发生冲突。
(2)同一环形航线中的航空器将以同速同方向水平运行并保持间隔,以此确保运行安全。
(3)内侧下层航线运行的航空器进场顺序优先于外侧上层航线,同一航线的航空器进场顺序与其优先级、进入航线时间、目的地机场运行态势等有关。与其在同层航线中运行的空间位置无关,各层航线均不执行严格的航空器空间位置排序。
(4)若终端区内各机场的运行态势、进场航空器数量有较大差异,则各层等待航线将预留一定的空位,以备不繁忙机场的进场航空器可穿越等待航线直接进场,减少等待时间。该空位也可供高优先级或出现紧急情况的航空器穿行,以备其快速进场。
(5)圆形准备航线的圆心是机场基准点而非某个航路点,原因在于执行自主运行模式的航空器在GBAS支持下将无需地面航路点进行方向指引;且机场跑道的运行方向受气象因素影响,若调整运行方向,则进场航线途径的航路点也将会变化。以机场基准点为圆心可保证航线位置稳定,便于航空器机载分布式ATM系统导航。
(6)该模式下各机场的离场航空器将执行自主运行下的连续爬升运行(continuous climbing operation, CCO)模式,同样无需地面导航台指引,可直飞终端区边界;且各层环形航线间有充足的水平及垂直间隔,离场航空器可经由该间隔穿越环形航线并爬升。因此本文模型及运行程序将不再考虑离场航空器影响。
2 终端区环形进场流程设计
终端区环形进场运行模式将根据空域运行态势和繁忙程度等划分为多种情况,具体如下。
2.1 直飞FAF点进场
该流程适用于空域运行态势极佳的时段,即终端区内航空器很少,且目的地机场不存在其他航空器等待进场。则其进入终端区后不必经由等待航线和准备航线,可在GBAS支持下由机载分布式ATM系统辅助飞行员完成路径规划,应用连续下降运行模式直飞FAF点,并在途中适时降低航空器高度及速度,调整几何构型并完成降落准备工作。
2.2 圆形准备航线等待
若空域运行状态较好,存在少量航空器排队进场,且圆形准备航线尚未排满,则该航空器进入终端区后不必经由各层等待航线,可直接进入准备航线中的空位,并与航线上现有的航空器保持水平间隔。其进入准备航线的位置仅与航线中的空位位置相关,与降落顺序无关。降落顺序将综合考虑各航空器进入航线时间、优先级和降落间隔标准等,由地基集中式ATM系统辅助管制员发布降落许可,并由机载分布式ATM系统辅助飞行员完成路径规划,直飞FAF点准备降落。
2.3 椭圆矩形等待航线等待
若空域整体运行较为繁忙,各机场的准备航线均已排满,且另有部分航空器在等待航线盘旋,则进入终端区的航空器也需排队等待。根据现有航空器的数量和位置飞至相应的等待航线空位,并根据空域运行态势和目的地机场繁忙程度等,按顺序逐级降低高度进入内层等待航线,直至进入目的地机场的准备航线并飞向FAF点准备降落。
2.4 穿越等待航线进场
若终端区内各机场运行态势不均,部分机场运行繁忙,对应的圆形准备航线已排满且有航空器在等待航线中绕飞;另一部分机场运行态势较好,准备航线中仍有空位。在此情况下进入终端区的航空器将根据目的地机场的运行态势不同进行区别考虑。若目的地机场运行态势繁忙,则航空器将进入等待航线,按序逐级下降直至进入准备航线并降落;若目的地机场运行态势良好,则该航空器将直飞并穿行等待航线中预留的空位,直接进入目的地机场对应的准备航线并降落。
在终端区环形航线运行模式下,各机场五边航线承担的航空器等待作用将由等待航线和准备航线代替完成,且由于机载通信导航技术可满足其执行自主运行模式,不必对各航空器进行空间位置意义的严格排序,因此各机场的五边航线将被取消。
3 进场顺序优化
在航空器进近及着陆阶段,考虑尾流间隔等因素,航空器型号及进场顺序对于间隔时间有较大影响;且进场航空器数量在时间层面分布不均,繁忙时刻需对部分航空器执行等待程序,以此确保满足间隔要求。在现有运行模式下,等待程序主要通过航空器在预设的等待航线中绕飞盘旋而实现。由于等待航线的位置和长度相对固定,因此程序的设定和执行较为固化,在实际运行中会进一步浪费空域资源,并增加航空器平均进场时间。
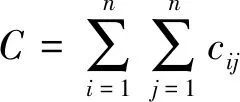
基于自主运行CDO模式和本文所述的环形进场航线设计,航空器可在任意位置进离环形航线,且同层航线中各航空器的排列与其进场顺序无关,因此ATC可通过该航线调整航空器进场的时间顺序,而不必改变航空器的空间顺序,以此提升机场及空域的运行效率。假设进场航空器可在一定范围内调整其进入终端区的时间,进而调整其进入各级环形航线的时间,以此缓解终端区内进场航空器时间分布不均的情况,并提升空域利用率和运行效率。使用模拟退火算法(simulated annealing, SA),选择合适的航空器,为之配置适当的时间调整量Δti以此达到进场顺序优化的目的。目标函数为无冲突前提下平均进场时间最短。假设某终端区共设置m层环形航线,某实验时段内共有n架航空器,则目标函数为
z=Min (C+αT)
(1)
(2)
(3)
式中:C为该时段终端区内发生航空器冲突的数量;T为航空器总进场运行时间;α为权重系数,将其设定为一较小数,对该目标函数去最小值,当且仅当冲突数量为0时,该目标函数才可达到最优。cij为0-1变量,标示第i和j架航空器间是否发生冲突,若发生冲突则取值为1,反之为0;ti为航空器i的实际进场时间;Δti为航空器i的时间调整量。
模拟退火(simulated annealing, SA)算法将优化分配各航空器的时间调整量,并实现平均进场时间最短的目标。约束条件如下。
(1)航空器位置约束——唯一性&确定性约束。假设某终端区共有1组圆形进场准备航线和m条椭圆矩形等待航线,则有

(4)
(2)降落时间间隔约束。当航空器离开圆形进场航线准备降落时,其与前架次航空器之间的间隔需满足间隔标准,该标准与机场的跑道运行模式、航空器型号(轻、中或重型机)有关,在独立进近运行模式下,间隔标准如表1所示。
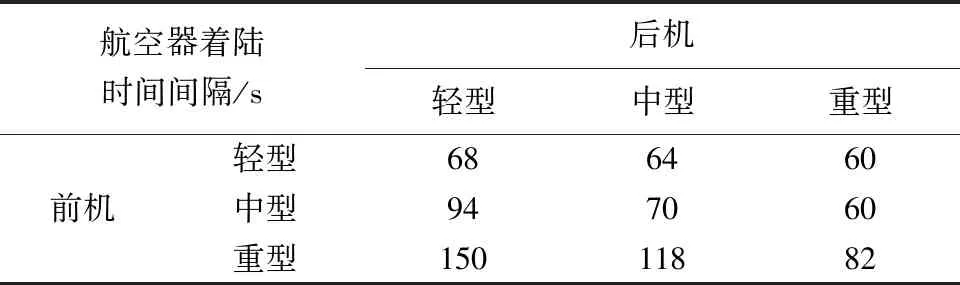
表1 航空器着陆时间间隔标准Table 1 Standard of aircraft landing time interval

(5)
(3)环形进场航线的进入时刻约束。实验中,各进场航空器进入终端区的时刻和三维位置与实际运行相同,并根据该航空器的运行方向和速度确定其进入环形航线的位置及时刻。通过对部分进场航空器预设一定量的延误,以此调整航空器进场顺序并降低平均进场等待时间。首先为各航空器分配初设的延误时间值,并由模拟退火优化算法对于各航空器所分配的时间值进行优化调整,以此实现该主动延误范围内最优的进场顺序。

(6)
4 仿真分析
为验证所述终端区环形进场航线的可行性,并将其与当前实际使用的进场航线及等待策略进行对比,选择多机场共用的进近管制扇区(ZSSSAP)作为仿真实验环境,对其进行数字化建模,应用终端区环形进场航线管制策略对某典型日的航班运行计划进行仿真,并与当日的实际运行数据进行对比评价。
4.1 环形进场航线设计
ZSSSAP扇区是上海浦东机场(ZSPD)和虹桥机场(ZSSS)共用的进近管制扇区,日常运行较为繁忙。首先对ZSSSAP扇区进行栅格化处理,使用水平间隔10 km,垂直间隔300 m的密铺长方体栅格对该空域进行划分。
根据前文所述的椭圆矩形等待航线和圆形准备航线设计,结合扇区空域特点,浦东、虹桥机场地理位置及航空器性能约束等,设计ZSSSAP扇区的环形进场航线共包含两条椭圆矩形等待航线和两条圆形准备航线。其中两条等待航线为同心设计,水平间隔为20 km;两条准备航线分别位于浦东和虹桥机场上空,以机场基准点为圆心,水平半径为20 km。环形进场航线具体信息如表2所示。
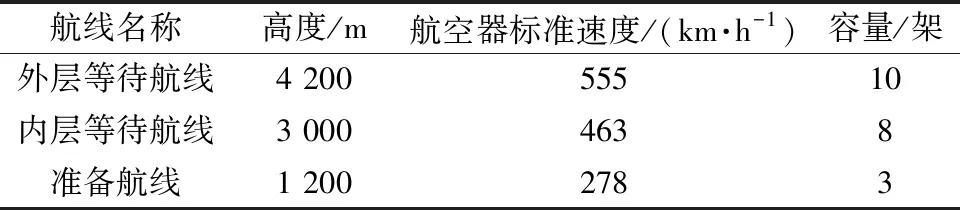
表2 ZSSSAP扇区环形进场航线设计参数Table 2 Loop approach route design parameters of ZSSSAP sector
4.2 航空器进场流程设计
本实验假定航空器应用地基增强系统支持的卫星导航,并执行自主运行CDO模式进场,可充分感知并共享空域环境的运行态势,不必受地面导航设备的分布和性能限制。由此,进入ZSSSAP扇区并计划在浦东机场或虹桥机场着陆的进场航空器,其进场流程将参照第2节,具体流程如下。
进入扇区的航空器将评估当前时刻终端区的运行态势,并识别内外层等待航线和准备航线上现有的航空器数量及其所在位置。根据当前运行态势决定其进场流程:若没有其他航空器等待降落,则直飞最后进近定位点,在途中调整航速、高度、机翼构型,并完成降落检查准备;若已有航空器在盘旋等待,则参照进入时间和优先级等,加入准备航线或等待航线执行绕飞,按序逐级下降并进场;若两机场运行态势不均,则以运行态势较好(航空器等待数量较少)的机场为目的地的航空器将经由环形航线中预留的空位间隙穿越航线并直飞最后进近定位点,另一机场的航空器将继续按序等待进场。
4.3 仿真实验
选取某典型日09:00—21:00在ZSSSAP扇区进近并着陆的航空器作为实验对象,将总时间分段,各组实验时间为1 h。各航空器以实际运行时间进入终端区,模拟所述的终端区环形进场航线运行模式,根据空域运行态势,分别进入等待航线或准备航线,按序排队进场。实验将基于该日12组时段的航空器初始运行信息,分别模拟先到先服务(first come first service, FCFS)模式和航空器进场顺序优化模式,假定不存在高优先级航空器;计算各组航空器的平均进场时间并度量空中交通运行态势,将结果与实际数据进行对比;随后使用蒙特卡洛模拟方法,选取实际运行中较为繁忙的时段,在各时段内再次生成一定数量的航空器加入运行模拟中,以此探究所述运行模式在该终端区的极限容量。
4.3.1 航空器平均进场时间
空域内航空器进场时间长短可以反映进场航空器的运转效率。由于各航空器进入终端区的位置不同、在终端区内运行路径长度不同、进入时刻的空域运行态势也不同,因此单独比较某航空器在两种运行模式下的进场时间没有实际意义。分别计算各组实验中航空器在两种运行模式下的平均进场时间,如表3所示。
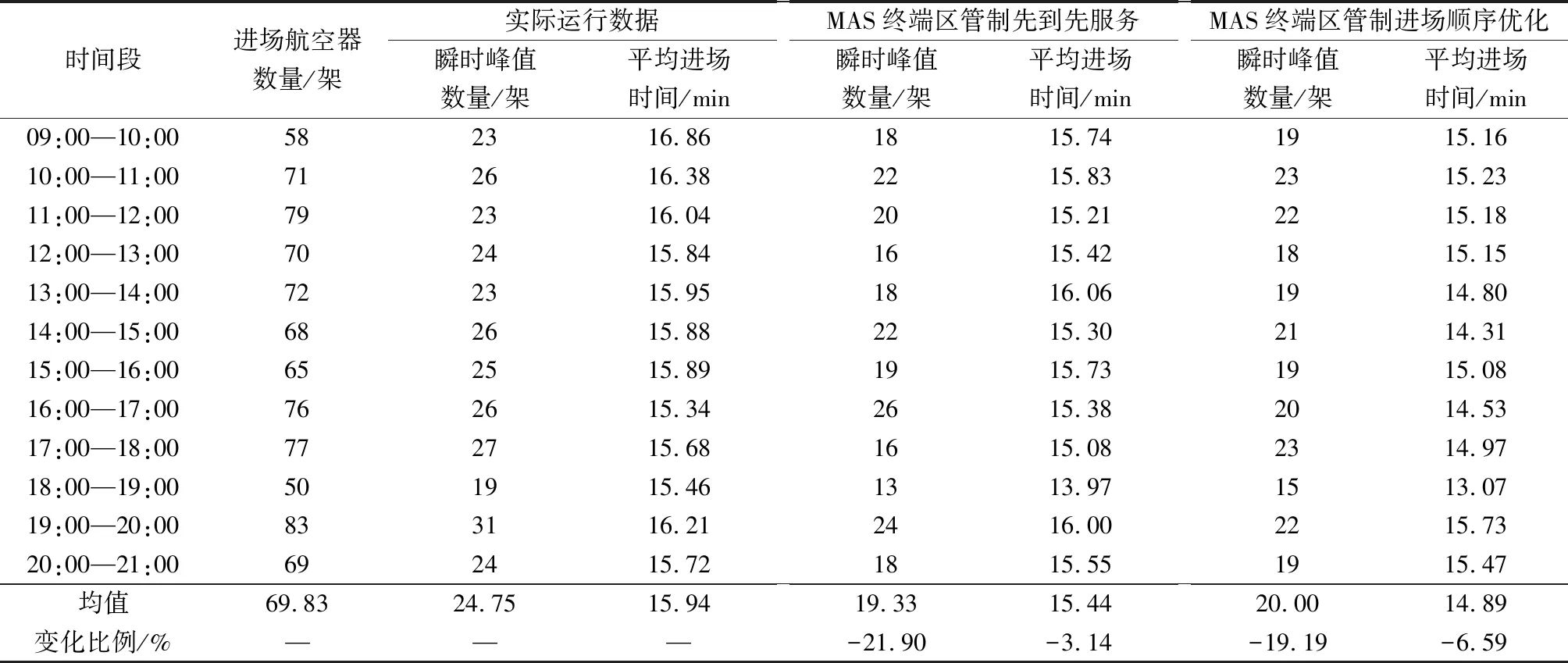
表3 航空器平均进场时间分时对比Table 3 Time-separation comparison of aircraft mean approach time
通过为所有航空器分配各自的时间调整量实现航空器进场顺序优化,航空器进场时间调整量分别为-3、0、3 min,其中0 min占比为50%,-3 min和3 min各占比25%;各时间调整量在初始状态时将随机分配给各航空器,使用SA算法优化其分配方案,从而实现更短的平均进场时间,模拟退火算法的参数设置如表4所示。算法优化迭代结果如图2所示。

表4 模拟退火算法(SA)基础参数设置Table 4 Parameter setting of simulated annealing algorithm
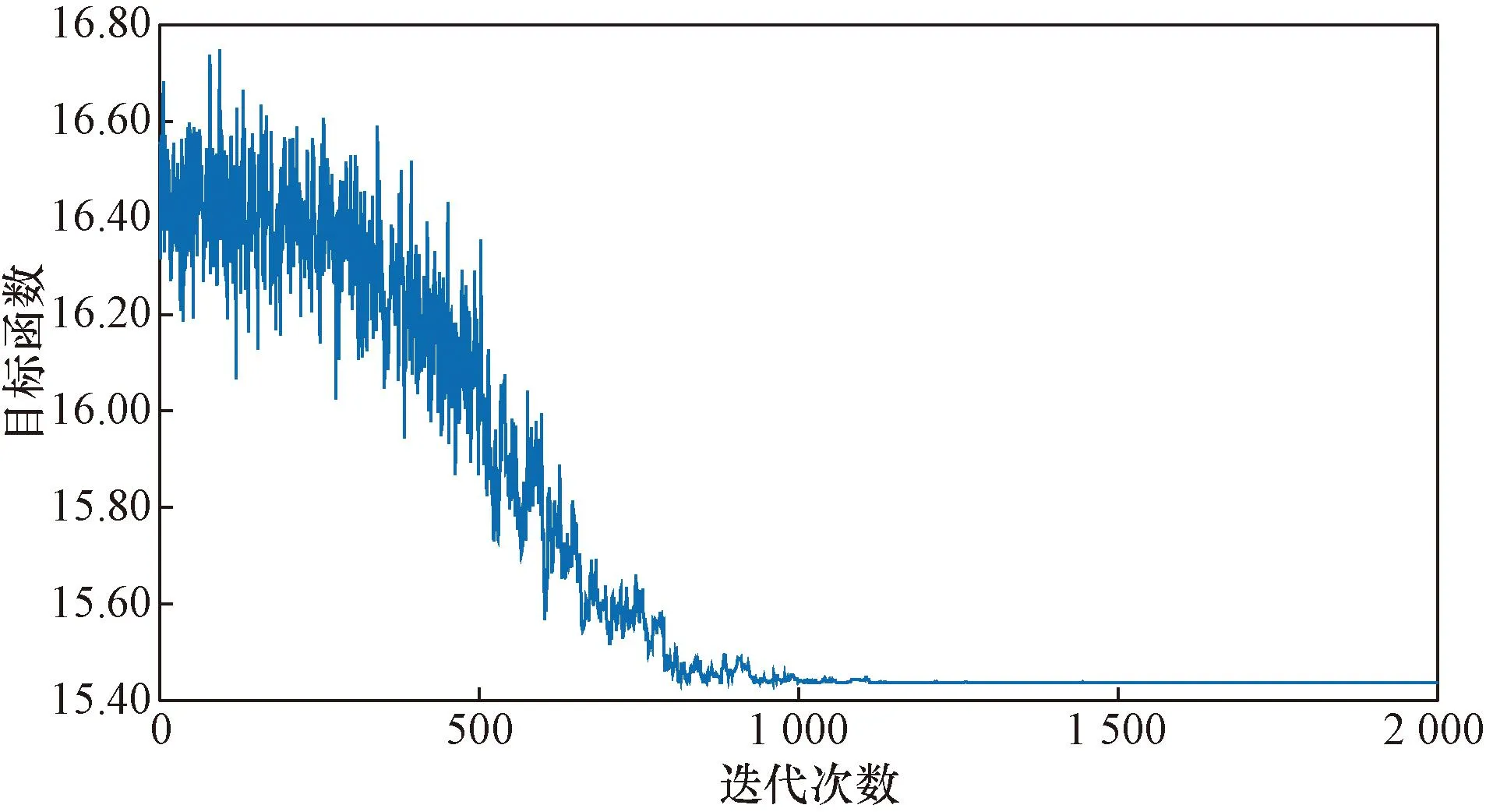
图2 某时段内模拟退火算法优化迭代结果Fig.2 The simulated annealing algorithm optimizes the iterative results in a certain period of time
对比终端区环形进场运行模式和实际运行模式可知,所述运行模式在进场航空器瞬时峰值数量和平均进场时间方面均较实际运行模式有一定优化,且经由进场顺序调整后,航空器的平均进场时间可得到进一步降低。
两运行模式下航空器平均进场时间的差异与空域繁忙程度相关。随进场航空器密度增加,两种运行模式的航空器瞬时峰值数量逐渐出现较大差异。在繁忙时段,终端区中航空器数量较多且不断有航空器进入,实际运行模式下空域内各航空器之间的运行干扰不断叠加,运行态势愈加繁忙,大量航空器需要盘旋等待或调整速度高度以避免冲突。因此随航空器数量增加,执行实际运行模式的航空器平均进场时间逐渐高于所述运行模式。
上述实验表明,所述运行模式可在运行态势繁忙情况下有效提升进场航空器运转效率。所设计的运行模式可将多机场终端区的进场航空流纳入统一指挥中,避免各机场的进场航空流发生时空冲突;且由于航空器在GBAS支持下应用CDO模式进场,不必依赖地面固定导航台指引,使得整体航迹长度较短。因此航空器进场时间可得到一定缩减,继而促使空域平稳运行。由于航空器进场过程同样受到终端区相邻的其他扇区空域运行状态的影响,因此若可拓展所述运行模式的覆盖范围,将相邻扇区纳入统一管理中,则航空器进场时间的调整幅度也可得到拓展,继而进一步优化航空器进场顺序,使得航空器平均进场时间得到更大程度地缩短。
4.3.2 蒙特卡洛模拟仿真极限运行情况
由上述实验可知,基于设计的终端区环形进场航线运行模式,并微调部分航空器的进场顺序后,终端区内进场航空器的瞬时峰值数量和平均进场时间均较先到先服务模式得到一定缩减,亦较实际运行模式得到更显著优化;即表示所述的进场运行模式可提高终端区内进场航空器运行效率,由此提升终端区空域容量。
为量化繁忙情况下所述运行模式对终端区进场容量的提升程度,使用蒙特卡洛模拟方法,选择进场航空器数量较多的时段,在该时段既有航空器的基础上,再次生成一定数量的进场航空器及其基础运行数据,以此扩充单位时间的航空器数量;并根据航空器进场顺序优化方法,计算此情况下终端区进场航空器的瞬时峰值数量和平均进场时间。以实际运行中上述指标数据的平均值作为参照,将计算所得数据与之进行对比,评估所述运行模式对于终端区进场容量的提升程度(即寻找模拟数据恰小于实际运行峰值数据时的进场航空器数量)。
选择最繁忙(进场航空器数量最多)的4个时段(11:00—12:00、16:00—17:00、17:00—18:00、19:00—20:00),为每个时段逐架次扩充航空器数量,并在每组航空器数量的设定下进行5 000次重复实验,将重复实验所得数据的平均值作为该时段该航空器数量对应的实验数据;各时段的实验数据如表5所示,所取参照数据为实际运行情况下该指标的平均数据,分别为进场航空器瞬时峰值数量24.75架,平均进场时间15.94 min。
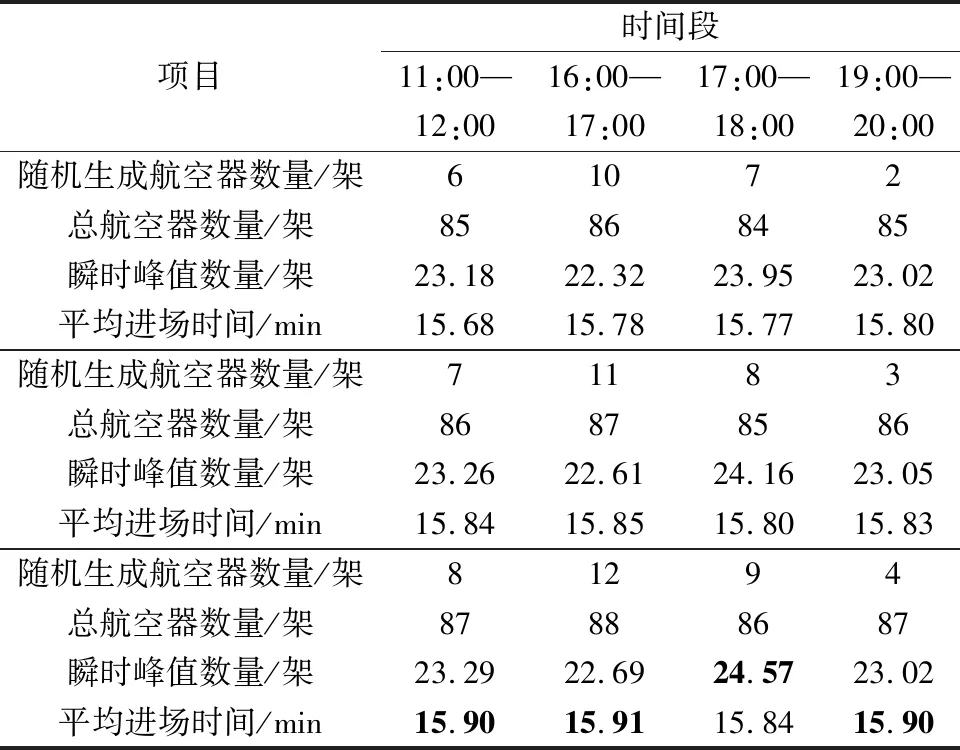
表5 蒙特卡洛仿真模拟终端区极限容量Table 5 The terminal area limit capacity was calculated by Monte Carlo simulation
如表5所示,经蒙特卡洛方法计算所得,基于本文所述的环形航线结构和航空器进场顺序调整策略,该终端区的小时容量可达87.00架/时,较实际运行的极限状态(83架/时)提高了4.82%。表明在当前的指标限制情况下,所述方法可使ZSSSAP终端区的极限容量得到进一步提高,即繁忙状态时该终端区可在保证运行安全的前提下容纳更多的进场航空器运行。
4.3.3 空域运行态势
空域中各栅格的运行态势将以空中交通复杂度表示。对于各时间段,分别以1 min为单位离散成时间片,依照实际运行数据中各航空器的航迹位置及其运行趋势,计算该时间片内空域各栅格受到的航空器复杂度影响,并将该时刻空域栅格复杂度的最大值设定为该时刻的空域整体复杂度;将栅格复杂度值大于整体复杂度值80%的栅格定义为高复杂度栅格[8]。对某时段内各时间片的数据进行平均化处理。实际运行情况下各时段的空域复杂度峰值、高复杂度栅格占比数据如表6所示。
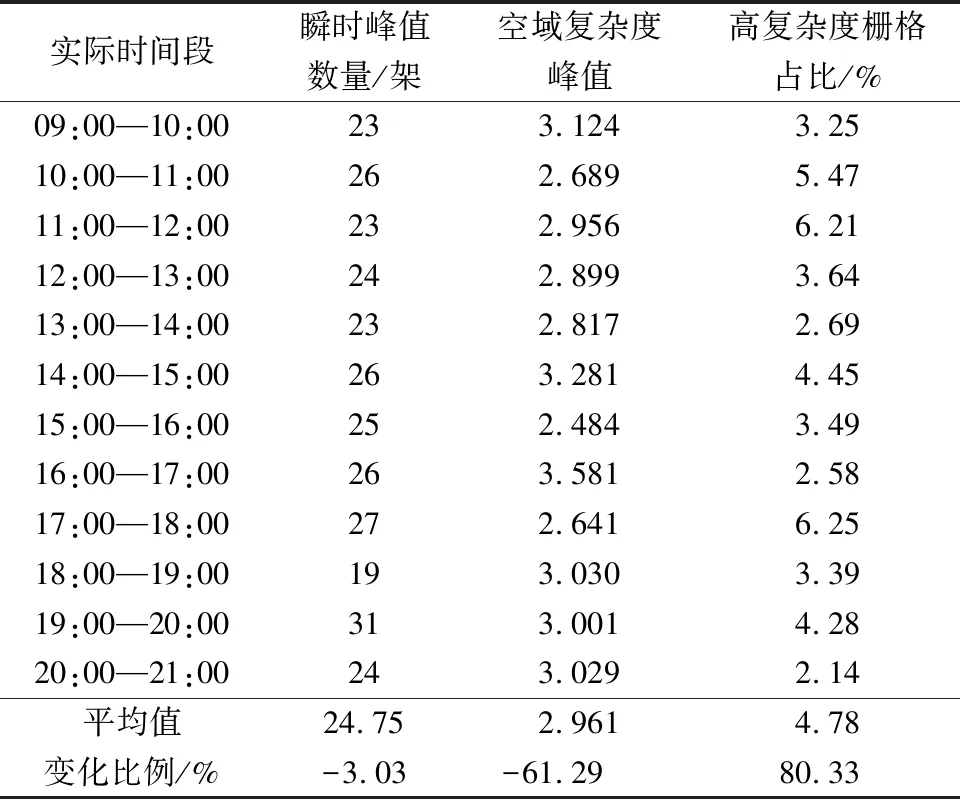
表6 空域运行态势分时对比Table 6 Time-separation comparison of airspace operation situation
若在所述运行模式下,该扇区设置的内外层等待航线和两机场的准备航线均被排满,不存在航空器空位,且内外层等待航线的航空器位置相对(两层航线上的航空器横或纵坐标对应相等),则此状态即为所述运行模式的极限运行情况。计算极限运行情况下各航空器对各栅格的复杂度,取其栅格复杂度最大值为该模式的空域复杂度峰值,数据如表所示。其中环形进场航线的航空器分布、各航线所在高度的空中交通复杂度分布如图3所示。
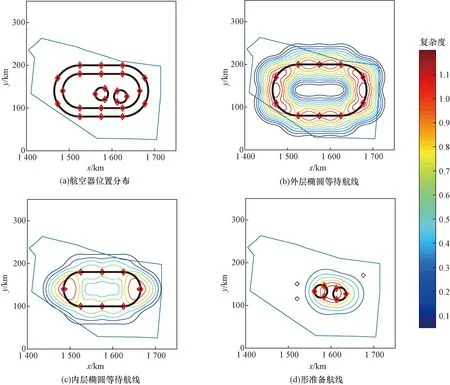
红色菱形表示航空器位置分布;色阶图表示该空域位置的空中交通复杂度图3 ZSSSAP终端区环形进场模式极限运行态势Fig.3 Maximum operating situation of loop approach route for ZSSSAP sector
如表6所示,所述环形进场航线运行模式在其极限运行情况下的空域复杂度峰值远低于当前运行模式在繁忙状态下的对应数据(降幅61.29%),且高复杂度栅格的数量占比远高于终端区管制进场运行模式(增幅80.33%),表明在当前运行模式的繁忙状态时,空域运行态势分布不均:由于航空器聚集在某些关键航路点附近的栅格处,导致该栅格运行态势繁忙,复杂度相对较高;另一部分栅格空域远离现有的起降航线,使得其复杂度长时间处于低位,栅格所在空域未得到有效利用。
所述运行模式的栅格复杂度大小与环形航线规划设计、航空器在航线上的分布直接相关。在极限运行情况下,各层环形航线上的航空器分布较当前运行模式更为均匀,不存在过度聚集的区域,因此其复杂度峰值较当前运行模式更低;且航空器在终端区内空间位置分散,分布区域较当前运行模式更广,因此其高复杂度栅格占比较当前运行模式更高。终端区环形进场航线运行模式可使用环形航线将多架进场航空器在空域内均匀分布,且CDO运行模式及GBAS支持的星基导航模式也使得航空器不必依赖固定航路点运行,因此不存在航空器过于聚集的栅格,从而降低航空器冲突风险。
综上所述,所设计的终端区环形进场航线运行模式可在保证运行安全的前提下缩减繁忙时段航空器进场时间并提高终端区空域利用率。以此促进进场航空器在区域内安全高效运行。基于此设计的ZSSSAP终端区椭圆矩形等待航线、圆形准备航线可有效应对浦东机场、虹桥机场日常运行的进场航班量规模。若两机场的航班量继续增加,可考虑调整ZSSSAP扇区的划定范围并增设新的等待航线,以容纳繁忙时段更密集的进场航空器。
5 结论
(1)根据终端区空域结构和运行现状,设计了一种面向终端区连续下降运行(CDO)的环形进场航线,包括椭圆矩形等待航线和圆形准备航线。
(2)根据终端区空域结构设计和区域内各机场的运行态势,为环形进场航线设计多种相应的运行程序,并设计航空器进场顺序调整方法,以此降低航空器平均进场时间。
(3)以ZSSSAP终端区为例,基于该终端区空域结构设计环形进场航线,并依据典型日实际运行情况,分别使用先到先服务模式和进场顺序优化模式进行仿真模拟,将结果与实际运行数据进行对比;使用蒙特卡洛仿真方法模拟该空域的极限运行情况,验证了本文所述的航线设计和进场程序可在繁忙时段有效提升进场航空器运行效率及空域容量。
(4)所述的环形进场航线模型默认进场航空器装配的通信导航监视设备满足自主运行下CDO模式,暂未考虑设备失效或执行IFR模式的航空器运行情况。后续可将环形进场航线进一步细化,规划出备用航线以供特殊情况的航空器运行使用;并以环形航线为基础,将航空器进场时间、进场航迹长度、油耗、污染物排放等纳入优化目标,对航空器进行进场顺序优化和进场路径规划。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23 19:16:53
科技创新与应用(2021年24期)2021-09-08 08:57:46
消费导刊(2019年12期)2019-08-21 01:02:23
知识经济·中国直销(2018年12期)2018-12-29 12:22:48
证券市场红周刊(2018年22期)2018-05-14 18:45:03
证券市场红周刊(2018年26期)2018-05-14 16:47:04
西南石油大学学报(社会科学版)(2016年1期)2016-12-01 05:21:32
北京航空航天大学学报(2016年7期)2016-11-16 01:50:57
太空探索(2016年3期)2016-07-12 09:58:45
太空探索(2016年8期)2016-07-10 09:21:58