基于Jack的老年电动代步车人机工程设计与优化
2024-02-28 06:00朱桐宋端树张善超白道靖刘立
包装工程 2024年4期
朱桐,宋端树,张善超,白道靖,刘立
基于Jack的老年电动代步车人机工程设计与优化
朱桐,宋端树*,张善超,白道靖,刘立
(江苏师范大学,江苏 徐州 221116)
满足行动不便的老年用户群体复杂的出行需求,提高电动代步车类工具使用过程中的舒适度。在传统老年电动代步车的基础上附加辅助站立结构,创新设计出一款坐、立两用的新型电动代步车,并借助Jack仿真软件,对老年用户坐姿驾驶和辅助站立支撑状态下的舒适度、可达域、可视域,以及上车过程中L4/L5下背部的受力情况进行分析,以验证关键人机交互结构、尺寸设计的合理性及舒适性。通过验证和调整,对电动代步车的初期设计方案进行改进,优化后的方案为老年电动代步工具的设计提供了参考,可以为满足老年用户复杂的出行需求、提高电动代步车类工具使用过程中的舒适度和安全性提供帮助。
工业设计;人机工程学;老年代步车;Jack
电动代步工具的普及和发展,为下肢活动不便的老年人提供了方便,成为确保老年用户自主出行的有效手段。研究表明,电动代步车对老年人的活动度、社会参与度和生活质量均有显著影响。国内外对电动代步车的研究局限于外观造型[1-3]、使用需求[4-6]和技术可实现性[7]方面的研究,缺乏对人机合理性的研究。此外,老年群体久坐后易发生难以站立的情况,代步类工具中的辅助站立结构能够促使老人进行间接的站立活动,从而缓解此类症状[8-9],然而,现有的代步车大多为坐姿驾驶模式,没有兼顾到用户坐、立两用的复杂需求。综合上述问题,结合老年用户的特征,设计出一款坐姿驾驶和辅助站立功能相结合的电动代步车,并借助Jack仿真软件对该款电动车的主要交互结构进行人机合理性的验证,以提高功能集成后该设计的合理性、安全性和舒适性。
1 Jack的人机仿真验证流程
Jack是一款集三维仿真、虚拟人体建模、人因工效分析等主要功能于一体的仿真软件[10]。用户能够自行导入三维模型来构建虚拟的仿真环境,对具有生物力学特性的虚拟人分配任务,并通过分析其行为来获得所需信息。范沁红等[11]利用Jack的碰撞检测分析工具,验证了虚拟人的背部与座椅靠背的贴合度;Liu等[12]通过分析Jack软件中采集的仿真行为数据,得出人机操作过程中人体负荷的变化规律和趋势预测;张文彦等[13]通过Jack的运动仿真功能对比分析出不同坐姿位置的舒适度;王年文等[14]借助Jack软件分析座椅使用时对腰椎的受力情况,分析得出座椅的相对舒适角度区间。本文主要通过Jack对老年用户使用电动代步车的行为进行仿真,评估其使用过程中的舒适度、可达域、可视域等方面,以验证文中所设计的电动代步车结构的合理性和舒适性,并对存在的人因问题进行改正和方案优化。文中所涉及的仿真与验证流程如图1所示。
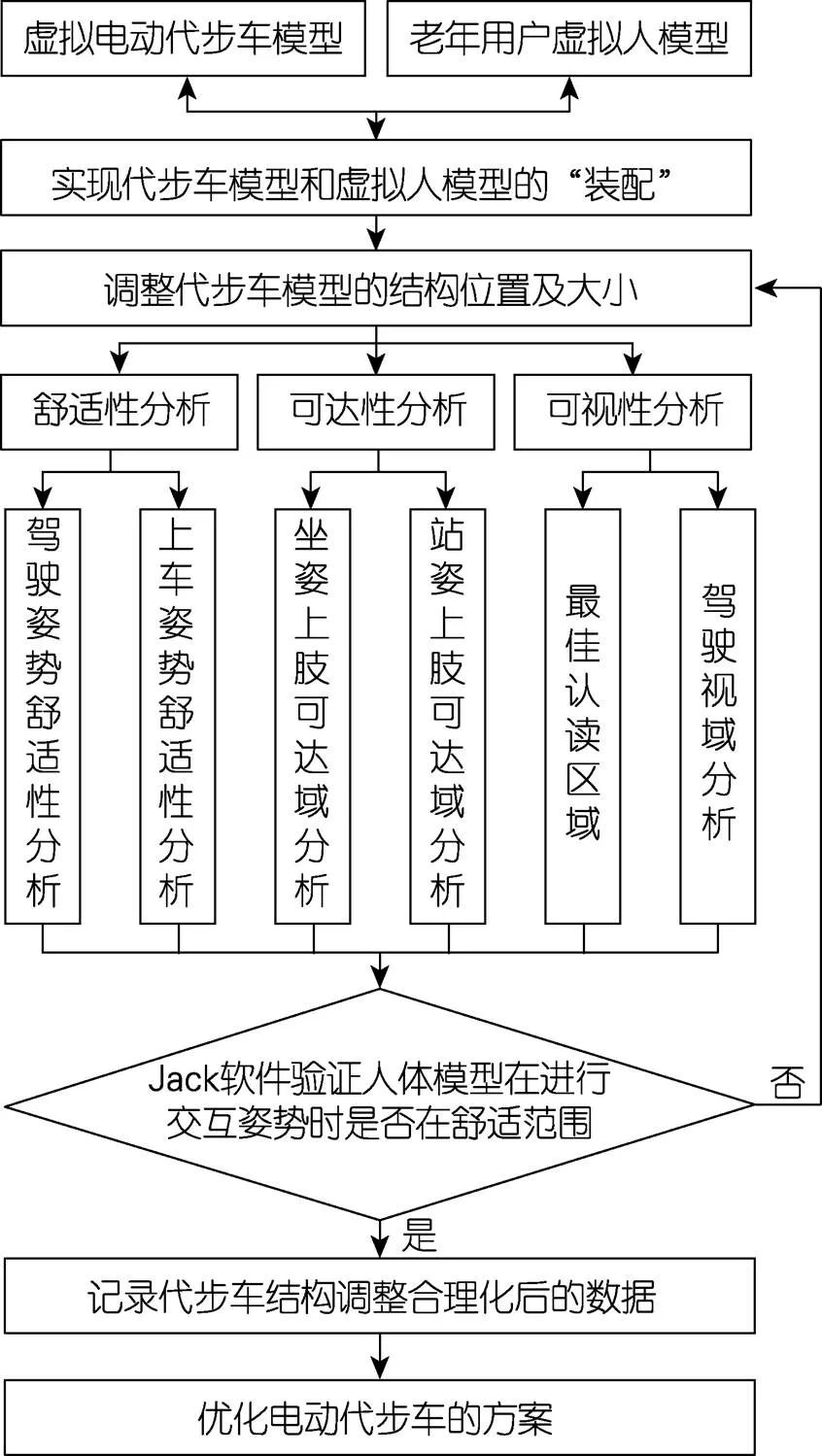
图1 Jack仿真及验证流程
2 设计方案
2.1 电动代步车的适老化设计
通过调研分析老年人群的日常生活习惯,了解老年人的基本生理特点和心理特点,以及影响老年电动代步车设计的相关因素。相关研究表明,老年用户在生理方面出现身体尺寸变化、感官退化、肢体僵硬老化、活动能力变差等现象。与此同时,其在心理方面由于处理信息的能力与效率降低,容易出现自卑、焦虑和孤独等负面情绪。因此,在设计时可以从舒适性、安全性、易用性、轻便性、灵活性等设计原则出发,在保证电动代步车基本功能的同时,使其设计更加适老化。本文老年用户特征所对应的设计原则、设计要素及后续评估要素,如表1所示。
2.2 电动代步车的设计方案
根据市场上现有老年代步工具的基本结构和功能的调研,结合表1中用户特征及设计因素分析进行电动代步车再设计。所设计的电动代步车结构可概括为操控部分、驱动部分和传动部分。操控部分主要由操纵把手、膝板、胸托、座椅、扶手和安全带等组成,如图2所示;驱动部分包括操纵把手的升降及转向控制、座椅抬升控制和车轮控制等功能;传动部分由离合器、变速器、主减速器和差速器等部件组成,电动代步车由上述三部分共同协作以实现正常行驶。
该电动代步车以坐姿驾驶和辅助站立支撑两种状态为主,通过电动控制操作把手和座椅自主抬升,以实现上述两种主要状态的自由切换。此外,面对下肢存在功能障碍的老年用户的特殊需求,此款电动代步车两侧设有扶手、可前后水平位移的椅面及可旋转调节角度的靠背,以实现用户自主地完成在日常坐具与代步车之间的迁移。本文主要依据表1中的评估要素,在Jack软件中对所设计的电动代步车操控部分的关键结构,进行人机工效方面的验证。
3 人机工程仿真分析
3.1 虚拟人模型建立
在Jack软件的虚拟人尺寸数据库里中国人的尺寸是1989年18~60岁男性和18~55岁女性成年人体尺寸信息,不符合本文研究老年用户的尺寸需求。目前,我国在老年人体尺寸方面的研究不够完善,尚未建立一个能够满足适老化设计需求的人体尺寸数据库。所以本文在验证时,所需的虚拟人尺寸数据参考了胡海滔[15]研究的中国老年用户身体尺寸。为验证该代步车可以最大程度地适应不同身高体型的老年用户,在Jack中所创建的被测虚拟人选取65~69岁年龄组中第95百分位男性老年用户人体尺寸作为设计上限,第5百分位女性老年用户人体尺寸作为设计下限,如图3所示。
表1 老年用户特征及相应的设计与评估要素
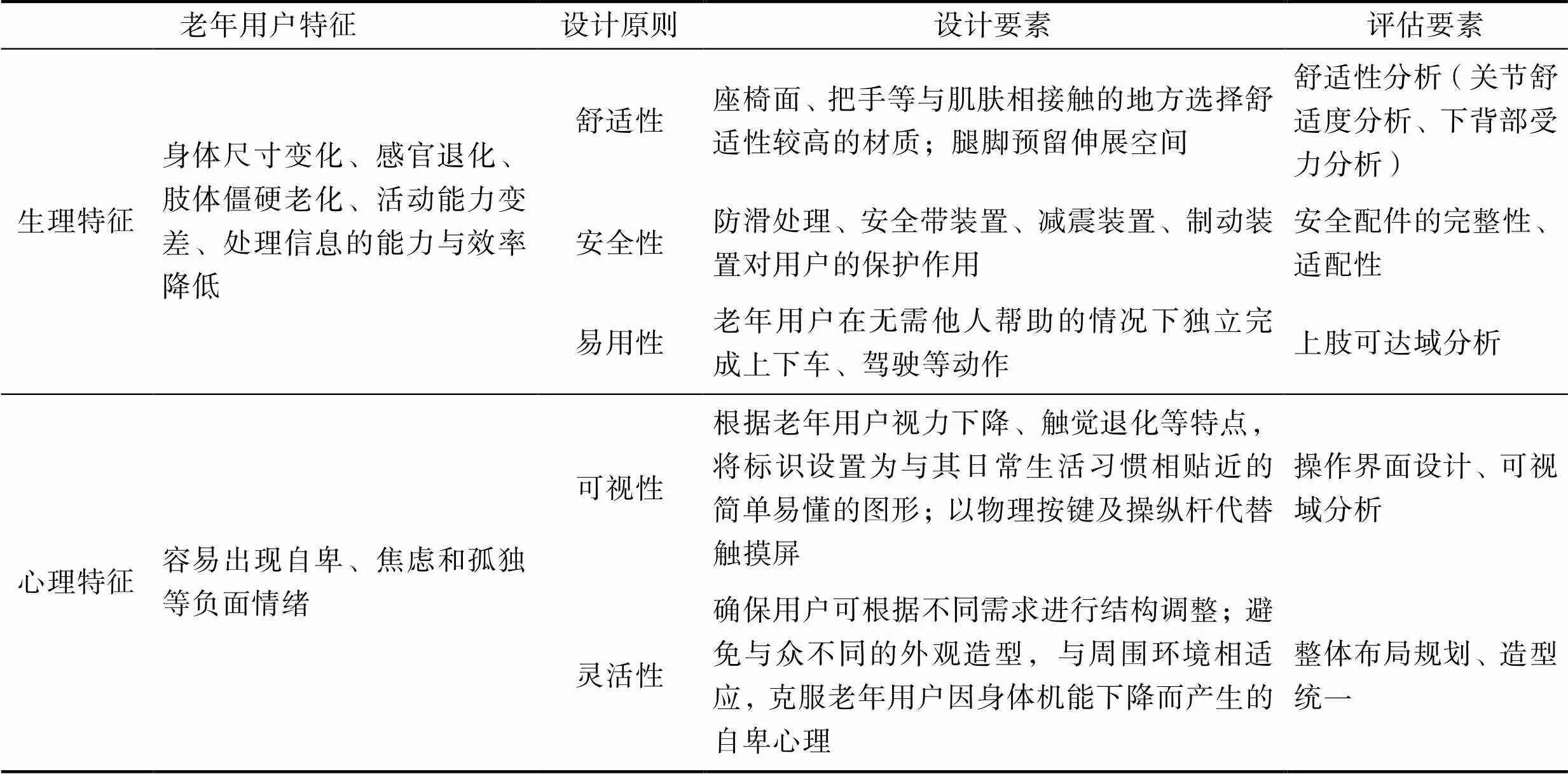
Tab.1 Characteristics of elderly users and corresponding design and evaluation elements
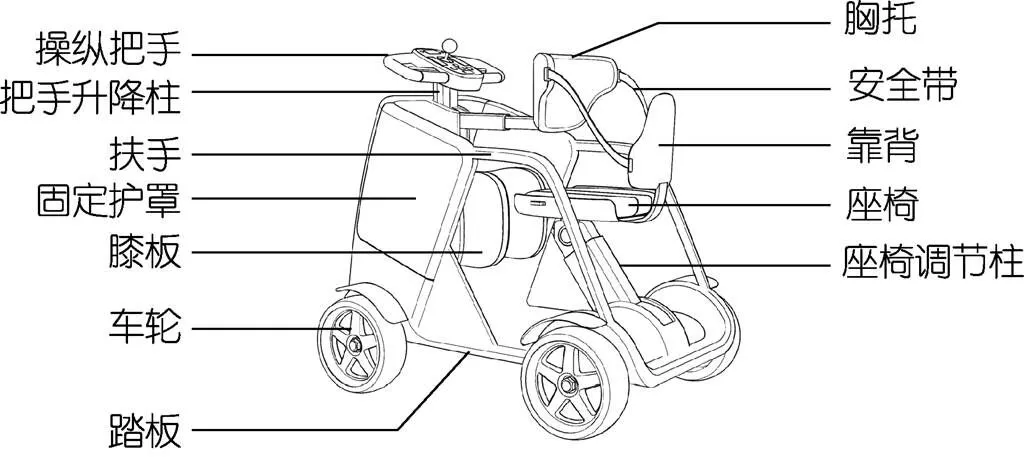
图2 电动代步车的基本结构
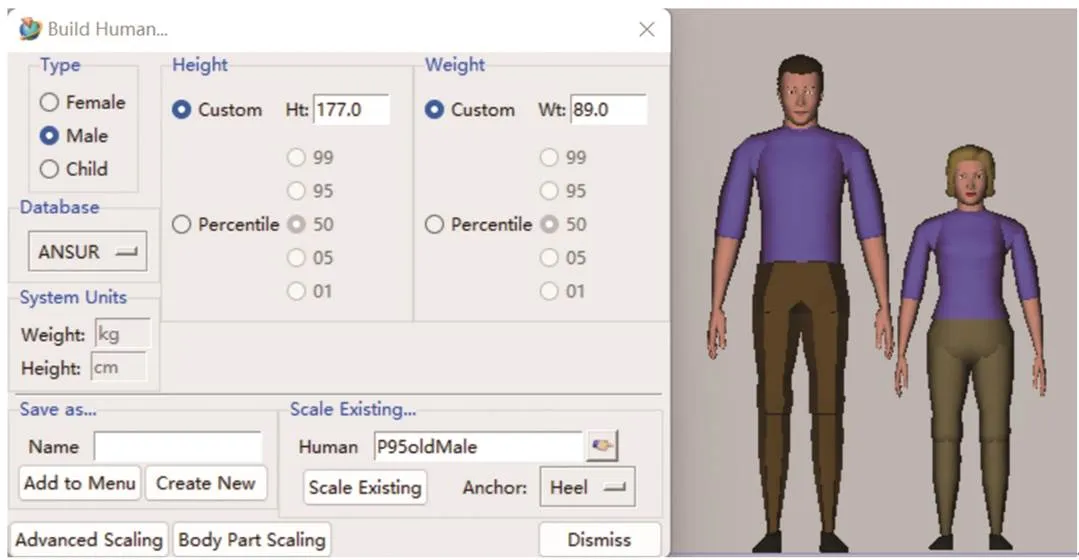
图3 P5女和P95男虚拟人模型建立
3.2 舒适度分析
3.2.1 驾驶姿势舒适度分析

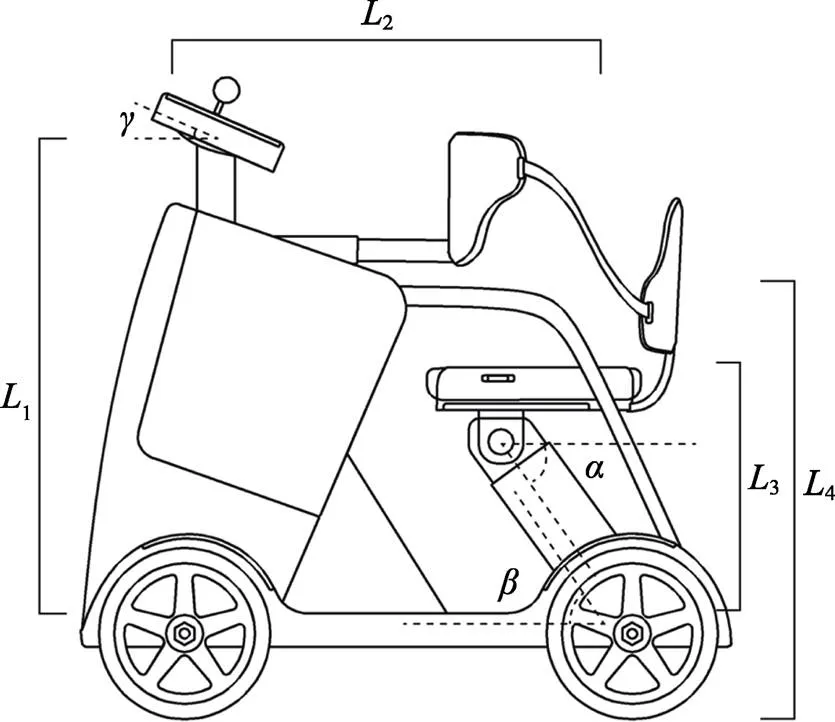
图4 电动代步车结构的相关参数定义

表2 P5女和P95男与坐姿相关的身体尺寸
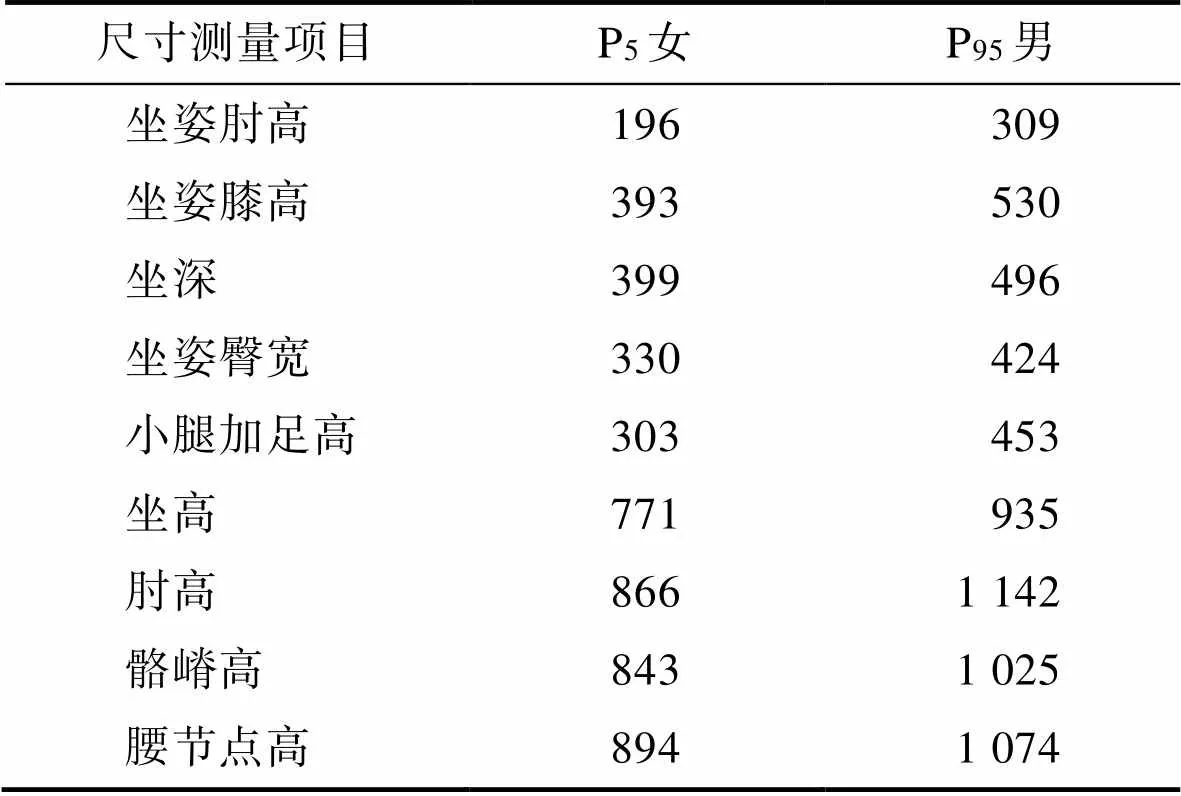
Tab.2 Body dimensions related to sitting posture for P5female and P95male mm
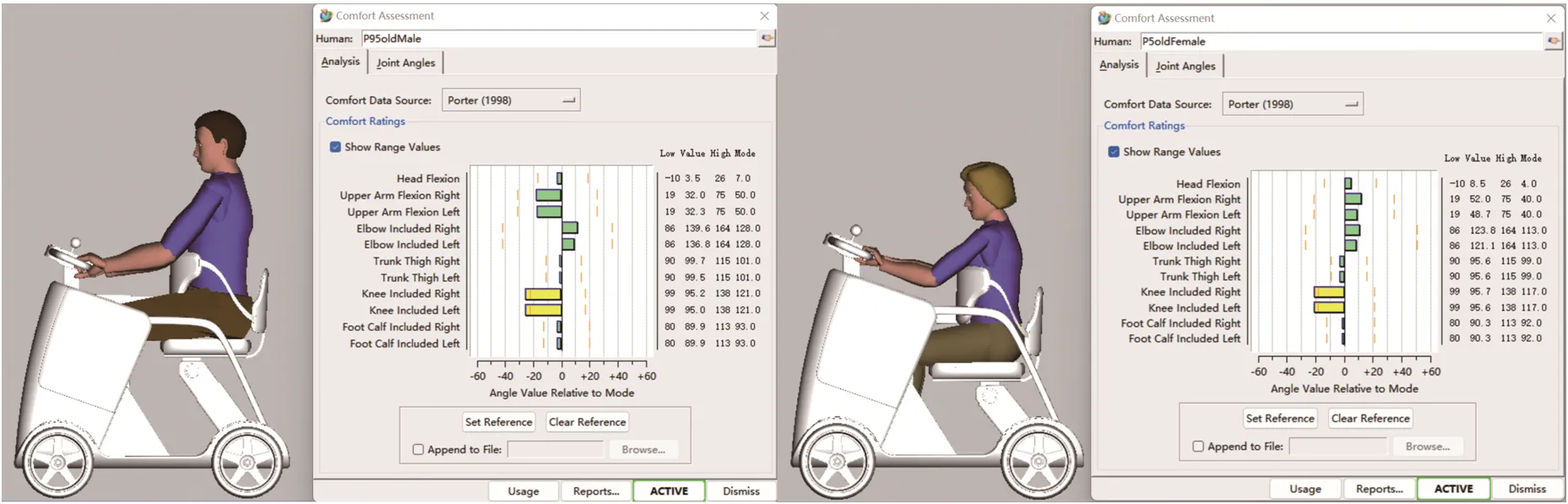
图5 坐姿舒适度分析图
3.2.2 上车过程动态仿真分析
该代步车的创新设计部分包括座椅椅面可平移及靠背可翻转,使下肢功能障碍的用户可借助两侧扶手实现从日常坐具迁移至代步车上,因此,保证这一过程中的舒适性和安全性尤为重要。上车过程描述:上车前,用户可通过按动座椅底部相应的按钮,将靠背向外侧旋转150°至座椅底部支撑柱相平行的位置,座椅椅面两端向下折叠,座椅椅面可以根据需求向后平移,完成该系列准备后用户从代步车后侧进行迁移。在用户完成迁移上车并调整好坐姿之后,可按动座椅下方的按键,靠背、椅面可恢复原来位置。最后,手动调节胸托至舒适位置并锁定,连接靠背安全带。为使产品更适用于老年用户日常居家生活情景,本文选取用户从床转移到电动代步车上的过程来研究,借助Jack中的动画制作工具Animation进行动态仿真,并利用下背部受力分析工具(Lower Back Analysis)分析下背部L4/L5的受力情况,以验证迁移过程中的舒适性。

图6 P95男在站立支撑状态下静态强度分析图
在验证前搭建好完整的仿真环境,在Jack中导入电动代步车的3D模型、标准单人床2 000 mm× 1 500 mm×610 mm的3D模型,与被测虚拟人模型进行匹配。在Animation动画制作窗口依次添加虚拟人从床上转移到代步车上的过程动作,以完成该流程的动态仿真设计。以P95老年男性用户为例,将用户从床上转移到代步车上的过程简化为四个阶段,分别为:阶段1,坐姿前伸双手分别触及两侧扶手;阶段2,双手支撑扶手起身;阶段3,支撑扶手身体前移;阶段4,双手支撑扶手缓慢坐下。如图7a~d所示。

图7 P95男从床上转移到代步车的过程
在仿真动画制作完成后,分别对这四个阶段进行受力分析,可将受力情况简化,如图8所示,并满足式(1)~(2)。



图8 P95男上车姿势静力学分析图


图9 P95男在阶段2时的L4/L5受力情况
表3 双手受力为被试者体重的1/4时各阶段的L4/L5受力情况

Tab.3 L4/L5 stress situation at each stage when the stress on both hands is 1/4 of the subject's body weight
3.3 可达域分析
3.4 可视域分析


图10 虚拟人上肢可达域分析图
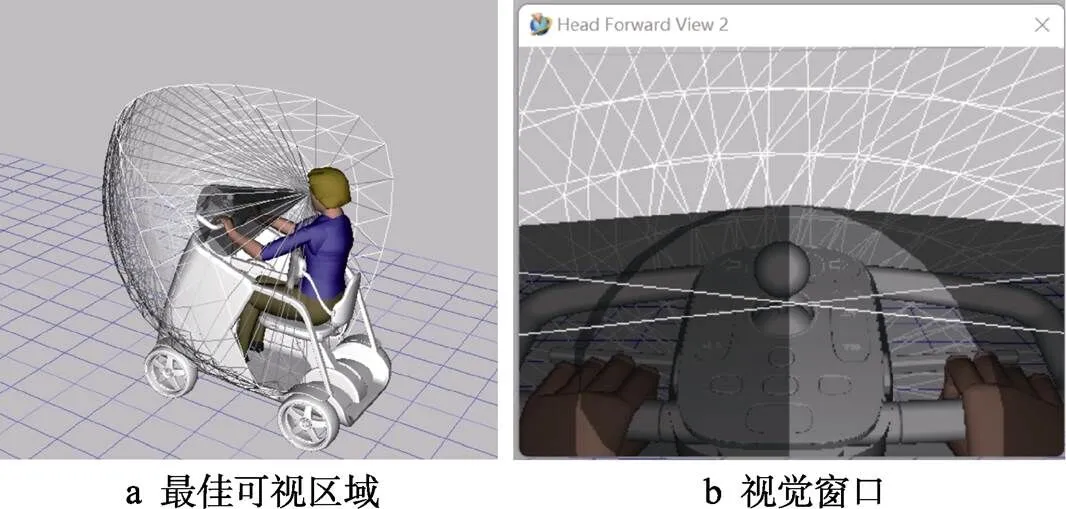
图11 P5女可视域分析图
4 方案设计优化
4.1 方案优化概述
上述分析结合人机工程学的相关规定与推荐值[18],对该款电动代步车的初期设计方案进行人机优化,以确保不同身高体态的老年用户能够轻松地实现对该款代步车的操控,改进前后的对比尺寸如表4所示,优化后的方案如图12所示。
表4 方案优化前后的尺寸对照

Tab.4 Comparison of dimensions before and after scheme optimization

图12 优化后的方案效果图
1)视野性能的改进。操纵界面布局重新优化并将其宽度扩大至20 mm;固定护罩形状优化并将其高度修改为517 mm,避免身高较矮、视线较低的用户忽视前端视野盲区障碍物。在固定护罩的形式上,考虑到用户上下车的便利性,防止过程中造成不必要的磕碰,方案删减掉固定护罩和踏板间的三角形连接装饰物。
2)两侧扶手的改进。经过前文验证两侧扶手的固定高度设置为740 mm时,对不同用户的适应性最佳,因此优化后的方案选用该高度,且仍采用后侧上下车的方式。此外,依据人机工学抓握要求,将半径修改为48 mm,且附加一定面积的防滑橡胶材质,以便于用户在使用的过程中既省力又安全。
3)座椅靠背的改进。在驾驶过程中,舒适的驾驶坐姿座椅靠背的角度在100°~110°,将靠背默认角度调整为100°,并可进行灵活调节;根据人体背部骨骼及肌肉特征,并为更好地贴合用户身型将座椅靠背结构前移54 mm。安全性方面,安全带设置在座椅靠背的两侧,可伸缩调节,与胸托两侧的卡扣相连接,卡扣与卡槽处内置磁吸结构,方便用户在使用时可自主定位连接位置。
4)操作把手与座椅的水平间距改进。座椅与操纵把手之间的舒适距离通常为250~350 mm,座椅设置为可前后调节结构,前后可水平位移量为100 mm,两侧留有充分的容脚空间;此外,原固定件膝板设计为前后可水平位移的结构,位移量设置为200 mm。
4.2 优化后的方案验证
对优化后的电动代步车的结构再次通过Jack进行人机仿真,验证结果总结如表5所示。结果表明:优化后的电动代步车的舒适度、可达性、可视性在一定程度上都得到改善。
表5 优化方案验证结果

Tab.5 Validation result of optimized scheme
5 结语
通过分析老年用户特性和使用需求,在传统电动代步车的基础上添加了辅助站立支撑等适老化结构。借助Jack软件验证了设计过程中所参考的尺寸范围的合理性,并依据验证结果,对电动代步车进行人机方面的优化。有效提高了老年电动代步车的安全性和舒适性,为今后设计人员验证和评估此类产品提供了参考。在验证中虚拟人物尺寸所参考的老年用户数据库具有一定的局限性,后续研究中将选取更具代表性的尺寸数据,以进一步优化电动代步车的人机适配性。
[1] 孙利, 覃忠志, 吴俭涛, 等. 多维意象下产品造型满意度预测模型研究[J]. 机械设计, 2023, 40(1): 127- 134. SUN L, QIN Z Z, WU J T, et al. Research on the Prediction Model of Product Modeling Satisfaction under Multi-Dimensional Imagery[J]. Journal of Machine Design, 2023, 40(1): 127-134.
[2] 王新亭, 王灿, 王欢欢, 等. 基于数量化Ⅰ类理论的电动代步车造型设计[J]. 机械设计与制造, 2020(7): 165-169. WANG X T, WANG C, WANG H H, et al. Modeling Design of Electric Scooter for the Elderly Based on the Theory of Quantification-1 Type[J]. Machinery Design & Manufacture, 2020(7): 165-169.
[3] 杨浩, 严扬, 胡也畅. 基于驾驶操作行为分析的宜老型代步车原型设计研究[J]. 机械设计, 2018, 35(6): 105-112. YANG H, YAN Y, HU Y C. Study on Prototype Design of Elderly-Oriented Scooters Based on Driving Operation Behavioral Analysis[J]. Journal of Machine Design, 2018, 35(6): 105-112.
[4] KU F L, CHEN W C, CHEN M D, et al. The Determinants of Motorized Mobility Scooter Driving Ability after a Stroke[J]. Disability and Rehabilitation, 2021, 43(25): 3701-3710.
[5] MCMULLAN K, BUTLER M. Self-Regulation when Using a Mobility Scooter: The Experiences of Older Adults with Visual Impairments[J]. British Journal of Occupational Therapy, 2019, 82(8): 512-521.
[6] 池宁骏, 王弓月. 基于卡诺模型和极端用户法的电动代步车设计[J]. 包装工程, 2022, 43(16): 162-169. CHI N J, WANG G Y. Design of Electric Scooter Based on Kano Mode and Extreme User Method[J]. Packaging Engineering, 2022, 43(16): 162-169.
[7] 郁明, 杨柳, 杨荣立. 电动代步车鲁棒故障检测与容错控制[J]. 电子测量与仪器学报, 2022, 36(3): 38-46. YU M, YANG L, YANG R L. Robust Fault Detection and Fault-Tolerant Control of Electric Scooter[J]. Journal of Electronic Measurement and Instrumentation, 2022, 36(3): 38-46.
[8] 崔腾飞, 李浩源, 王玥, 等. 基于人体站立分析的辅助站立移位机研究[J]. 中国康复医学杂志, 2018, 33(1): 86-89. CUI T F, LI H Y, WANG Y, et al. Research on Auxiliary Standing Shifter Based on Human Standing Analysis[J]. Chinese Journal of Rehabilitation Medicine, 2018, 33 (1): 86-89.
[9] 董宝莲. 基于老年人生理特点的辅助站立椅设计与研究[D]. 天津: 天津大学, 2019. DONG B L. Design and Research of Auxiliary Standing Chair Based on Physiological Characteristics of the Elderly[D]. Tianjin: Tianjin University, 2019.
[10] 钮建伟, 张乐. Jack人因工程基础及应用实例[M]. 北京: 电子工业出版社, 2012. NIU J W, ZHANG L. Jack Human Factors Engineering Foundation and Application Examples[M]. Beijing: Publishing House of Electronics Industry, 2012.
[11] 范沁红, 江星辰, 武学良, 等. 基于理想压力的机车座椅优化设计与舒适度试验研究[J]. 机械工程学报, 2022, 58(10): 383-394. FAN Q H, JIANG X C, WU X L, et al. Experimental Research on Optimization Design and Comfort of Locomotive Seat Based on Ideal Pressure[J]. Journal of Mechanical Engineering, 2022, 58(10): 383-394.
[12] LIU X, LV J, XIE Q S, et al. Construction and Application of an Ergonomic Simulation Optimization Method Driven by a Posture Load Regulatory Network[J]. Simulation, 2020, 96(7): 623-637.
[13] 张文彦, 陶庆, 李兆波, 等. 采用动作捕捉与JACK软件的坐姿评价方法研究[J]. 机械设计与制造, 2022(9): 32-36. ZHANG W Y, TAO Q, LI Z B, et al. Research on Evaluation Method of Sitting Posture Using Motion Capture and JACK Software[J]. Machinery Design & Manufacture, 2022(9): 32-36.
[14] 王年文, 陈明含, 谭晓萌, 等. 坐式下肢康复训练机器人人机舒适度设计[J]. 包装工程, 2021, 42(20): 125-131. WANG N W, CHEN M H, TAN X M, et al. Improved Comfort Design of Sitting Lower Limb Rehabilitation Training Robot[J]. Packaging Engineering, 2021, 42(20): 125-131.
[15] 胡海滔. 老年人的人体测量[D]. 北京: 清华大学, 2005. HU H T. Anthropometric Measurement of the Elderly[D]. Beijing: Tsinghua University, 2005.
[16] 顾余辉, 简卓, 喻洪流. 可躺可立式电动轮椅结构设计与运动学仿真[J]. 中国康复医学杂志, 2012, 27(12): 1129-1132. GU Y H, JIAN Z, YU H L. A Design and Kinematics Simulation of a Stand-Able and Lie-Able Electric Wheelchair[J]. Chinese Journal of Rehabilitation Medicine, 2012, 27(12): 1129-1132.
[17] 陆剑雄, 张福昌, 申利民. 坐姿与座椅设计的人机工程学探讨[J]. 人类工效学, 2005, 11(4): 44-46. LU J X, ZHANG F C, SHEN L M. Discussion on Ergonomics of Sitting Posture and Seat Design[J]. Chinese Ergonomics, 2005, 11(4): 44-46.
[18] 丁玉兰. 人机工程学[M]. 北京: 北京理工大学出版社, 2017. DING Y L. Man Machine Engineering[M]. Beijing: Beijing Insititute of Technology Press, 2017.
Structural Design and Layout Optimization of Electric Scooter Based on Jack
ZHU Tong, SONG Duanshu*, ZHANG Shanchao, BAI Daojing, LIU Li
(Jiangsu Normal University, Jiangsu Xuzhou 221116, China)
The work aims to meet the complex travel needs of elderly users with limited mobility and improve the comfort of electric scooter tools during use. On the basis of traditional electric scooters for the elderly, an auxiliary standing structure was added to innovate in the design of a new type of electric scooter that could be used for both sitting and standing. With the help of Jack simulation software, the comfort, accessibility, and visibility of elderly users in sitting and auxiliary standing support states, as well as the stress on the lower back of L4/L5 during the boarding process, were analyzed to verify the rationality and comfort of key human-machine interaction structures and size designs. Through verification and adjustment, the initial design scheme of electric scooters has been improved. The optimized scheme provides a reference for the design of electric scooters for the elderly, which can meet the complex travel needs of elderly users and improve the comfort and safety of electric scooter tools during use.
industrial design; ergonomics; elderly scooter; Jack
TB472
A
1001-3563(2024)04-0107-08
10.19554/j.cnki.1001-3563.2024.04.011
2023-09-08
江苏师范大学研究生科研与实践创新计划项目(2022XKT0361);江苏省重点研发计划(社会发展)项目(BE2016651);徐州市重点研发计划(社会发展)项目(KC22281)
猜你喜欢
包装工程(2023年18期)2023-09-27
车主之友(2023年2期)2023-05-22
小天使·一年级语数英综合(2020年9期)2020-12-16
人民周刊(2020年17期)2020-10-29
电子制作(2019年10期)2019-06-17
电子制作(2018年19期)2018-11-14
故事作文·低年级(2016年7期)2016-05-14
工业设计(2016年5期)2016-05-04
党的生活(2015年4期)2015-04-18
汽车维护与修理(2015年7期)2015-02-28