
英标体系含道口区间列车发车间隔分析
2024-02-27 09:33张雨千
铁路通信信号工程技术 2024年2期
张雨千
(北京全路通信信号研究设计院集团有限公司,北京 100070)
近年来,中国铁路迎来了全面建设与发展的新时期[1],国内企业在海外铁路项目中的中标率也不断提升。由于英国在铁路领域起步最早,其标准与制式在世界范围内影响较大,故在实际工程项目中海外项目的业主普遍认可英国铁路标准[2]。而对列车追踪及运行模型的研究一直是列车运行控制系统领域的重点探讨内容。近年来,侯黎明等人对高速铁路追踪间隔进行了分析与优化设计[3];江明等人对列车追踪间隔时间的分解及影响进行分析[4];韩辉对高速铁路列车追踪间隔仿真计算系统进行了设计与实现[5];周丽华等人基于恒定冲击率模型对列车运行时间进行计算[6];鲍鹏宇等人基于粒子群优化对列车制动进行研究[7];Takeuchi等人对不同信号系统中的列车运行最小间隔时间和线路通过能力进行了分析[8];Yuan和Hansen对车站通过能力优化进行研究[9];Khmelnitsky对列车追踪运行最优控制方案进行研究[10];Aodsup等人对高压电力网对列车追踪间隔的影响进行研究[11]。因此,研究和优化英标场景下多道口区间列车发车间隔对提升国内企业在海外项目中的竞争力,具有一定的实际价值与意义。
英国铁路的行业标准是由英国的铁路集团制定,其中也包括与平交道口相关的标准,RIS-0792-CCS Level Crossing Operational Interfaces with Trains是英标平交道口最重要的参考标准[12]。在该标准中规定,列车驶入接近通知区段后,道口信号机点亮黄灯3 s后熄灭,闪烁红灯5 s。英标体系中多为自动道口,即根据接近通知设备的信息,自动向道口系统发出接近通知,由道口系统自动控制公路侧信号,并驱动栏木升降。
1 含道口线路场景介绍及定义
本文研究的线路和道口情况如下:
1)含道口线路采用四显示自动闭塞系统,区间通过信号机兼作遮断信号机;
2)线路最高运营速度为100 km/h;
3)道口为自动道口,与铁路侧信号机有联锁关系,栏木落下时间取6 s;
4)为提高列车运行效率,列车接近道口不触发制动;
5)采用无线通信设备发送移动授权;
6)道口接近区段设置雷达用于测速测距;
7)列车装备ETCS车载列控系统。
道口报警时间是指从向使用者发出告警到首列车到达该平交道口的时间长度。报警时间计算如公式(1)所示。
其中,Twarning:道口报警时间;
Tclose:道口关闭的时间,14 s;
Ttrain:道口关闭后,列车到达道口的时间。
道口完全关闭所需时间为道口信号点亮黄灯3 s,闪烁红灯5 s,栏木落下6 s,共14 s。道口完全关闭所需的时间固定,报警时间长度主要取决于道口关闭后列车到达道口的时间。
接近通知设备设置的位置应考虑列车按最高允许速度运行,接近通知点距道口的距离如公式(2)所示。
其中,Sstrike:接近通知点与道口间距;
vmax:线路运营速度,取100 km/h。
预告通知点距道口的距离如公式(3)所示。
其中,Sadvance:预告通知点与道口间距;
Tmin:最小公路开放时间,取10 s。
接近/预告通知点具体的位置可设置在满足公式(2)和(3)要求的相应信号机的位置。
为有效控制道口报警时间,道口接近区段采用雷达实时测速测距。当雷达测的距离与速度满足道口报警时间时,启动道口关闭程序,通知道口控制系统关闭道口。
道口关闭后,遮断信号机才允许开放。为保证列车运行效率,减少追踪间隔时间,应避免列车在过道口时降速,故列车需在启动制动前收到道口关闭后新的移动授权。即道口确认关闭点与道口的间距需大于该速度下列车启动制动点与道口的间距,如公式(4)所示。
其中,Sclose:道口确认关闭点与道口的间距;
Sbraking:列车以速度v运行时的制动距离;
Ssignal:遮断信号机距道口的距离,本文取67 m。
2 列车接近道口模型分析
雷达在通知道口控制系统关闭道口后,列车可能加速、减速或匀速接近道口,以下就这3种情况进行具体分析。
2.1 列车加速接近道口
列车速度为v0时,道口启动关闭程序,列车距道口距离为Sstrike。此时列车加速运行,运行14 s后,若道口完全关闭,则列车获得道口关闭后新的移动授权,并继续加速行驶通过道口。若列车以速度v0加速运行14 s后,道口仍未完全关闭,则列车无法获得新的移动授权,此时需立即启动制动,并在遮断信号机前停车。列车运行曲线如图1所示。
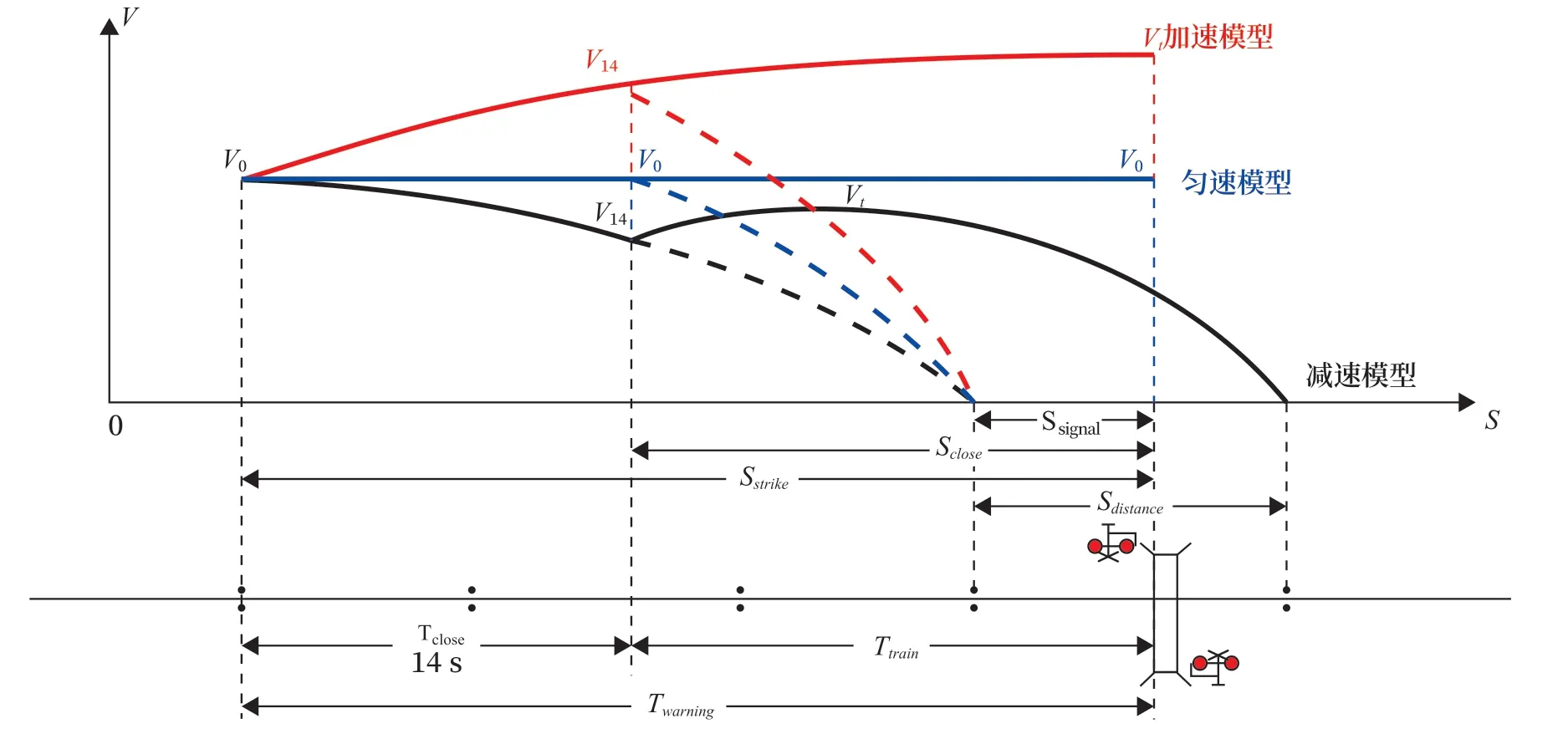
图1 列车接近道口模型Fig.1 The model of the train approaching the level crossing
列车运行14 s后速度为v14,列车继续加速运行至道口的速度为vt,根据加速度公式及上文的道口报警时间公式(1)可得以下方程组,如公式(5)所示。
其中,aacc:列车加速度,如图2所示。
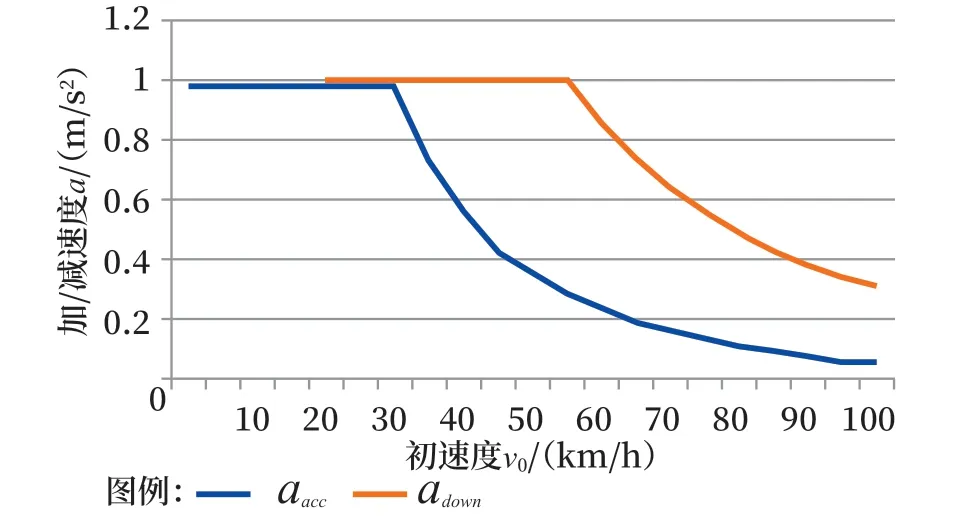
图2 速度与加/减速度关系Fig.2 Relationship between speed and acceleration/deceleration
取公式(4)的临界值可得到固定的道口完全关闭点距离,方程组如公式(6)所示。
其中,adown:列车减速度,如图2所示。
由于线路最高速度为100 km/h,因此v14与vt均不高于100 km/h。若列车加速后速度达到100 km/h,则按照100 km/h的速度匀速运行并通过道口。根据公式(5)、(6)可以得到列车初速度与道口报警时间的关系,如图3所示。经计算可知,当列车初速度v0≤30 km/h时,道口报警时间不断减小,列车初速度30 km/h≤v0≤100 km/h时,道口报警时间不断增加。

图3 列车接近道口初速度与道口报警时间关系Fig.3 Relationship between the initial speed of the train approaching the level crossing and level crossing alarm time
2.2 列车匀速接近道口
该场景与加速通过道口场景相似。根据上文的道口报警时间公式可得以下方程组,如公式(7)所示。
经计算得出初速度与道口报警时间的关系,如图3所示。当列车初速度v0≤45 km/h时,道口报警时间不断减小,列车初速度45 km/h≤v0≤100 km/h时,道口报警时间不断增加。
2.3 列车减速接近道口
减速场景与加速通过道口场景类似。但需考虑列车运行14 s后,若道口完全关闭则列车获得新的移动授权,此时若继续减速运行,则列车会在遮断信号机前停车。故需先加速运行后减速运行,使列车在遮断信号机内方的次一架信号机前停车,由此可得方程组,如公式(8)所示。
其中,Sdistance:闭塞分区长度。
为避免列车减速后停车,即v14>0 km/h,应使v0≥55 km/h。根据公式(8)可知,遮断信号机距次一架信号机的距离Sdistance是决定vt大小的重要因素,Sdistance≥715 m且不断增大时,从部分逐渐至所有初速度接近道口的列车需以100 km/h匀速运行一段时间,当Sdistance<715 m时,根据公式(8)代入相应数值可得到最大速度vt。当Sdistance=700 m时,列车初速度与道口报警时间关系如图3所示。当列车初速度55 km/h≤v0≤65 km/h时,道口报警时间不断减小,列车初速度65 km/h≤v0≤100 km/h时,道口报警时间不断增加。
3 多道口控制方案
若道口间距较近,则会存在多个道口共用一个遮断信号机的情况,此时信号机的开放需要防护范围内所有道口均关闭。
3.1 固定接近通知点关闭道口
道口在雷达测得的速度与距离满足道口报警时间的要求时,启动道口关闭程序。以列车匀速模型进行分析,遮断信号机内方最后一个道口关闭后,遮断信号机方能开放,按照公式(4)的关系,可知道口的确认关闭点距道口的距离关系如公式(9)所示。
由公式(9)可知,遮断信号机内方第一个道口LX1与最后一个道口LX3之间的间距越大,道口完全关闭点与道口之间的距离越大,根据公式(7)可知,道口的报警时间越长。当列车加速或减速通过多道口区域时结论一致。
3.2 固定时间间隔关闭道口
同一个遮断信号机内的道口采用固定间隔依次关闭的方式,即遮断信号机内第一个道口关闭,经过T秒后第二个道口关闭。
选用列车匀速模型分析,该方案需满足以下条件,如公式(10)所示。
n:遮断信号机内方道口数量。
由公式(10)可知,间隔时间T越短,即多道口同时关闭,遮断信号机内方道口数量越少,道口报警时间越短。当列车加速或减速通过多道口区域时结论一致。
4 多道口线路车站发车间隔分析及计算
区间空闲状态下两车站向区间发车,下行方向的列车从A站出发,上行方向的列车从B站出发,到达各个道口的时间如图4所示。
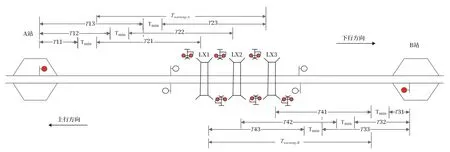
图4 遮断信号机内有多个道口示意Fig.4 Schematic diagram of several level crossings in the obstruction signal section
从A站出发的列车到达LX1道口预告通知点需T11时间,Tmin后到达LX1道口接近通知点,T21时间后到达LX1道口,T12、T22、T13、T23同理。Twarning-A为A站发出的列车使道口报警的总道口报警时间;从B站出发的列车到达LX3道口预告通知点需T31时间,Tmin后到达LX3道口接近通知点,T41时间后到达LX3道口,T32、T42、T33、T43同理。Twarning-B为B站发出的列车使道口报警的总道口报警时间。
考虑极限情况,当A站发车的列车运行在Twarning-A时间段内时,从B站发车的列车刚好出清Twarning-B时间段,将从A、B站发车的列车之间的时间间隔定义为ΔT1,如公式(11)所示。
在A站发车后ΔT1时间内B站可以向道口方向发车。
为保障公路侧人和车通行,当A站先行发车的列车运行T11+Tmin+Twarning-A时间后,道口必须开放最短Tmin时间,极限情况下道口开放了Tmin时间时,从B站发车的列车刚好到达LX3的接近通知点T41,将从A、B站发车的列车之间的时间间隔定义为ΔT2,如公式(12)所示。
ΔT1~ΔT2时间内B站不得发车,否则将会导致道口刚开放便关闭或道口持续关闭,不满足道口最小开放时间Tmin。在A站发车后ΔT2时间后,B站可正常向道口方向发车。
遮断信号机内只有一个道口的发车间隔计算场景与多道口场景类似,此处不做赘述。考虑列车在站间运行时间最短,当出站信号机恢复绿灯显示时,同站可追踪发车。
5 基于MATLAB的含多道口区间列车发车仿真
位于双线区间上的C、D两站区间每条线均有7个闭塞分区,设有6架通过信号机。除第一个闭塞分区外,其他区段长度均为712 m。进站信号机距出站信号机1 712 m。区间含3个道口,其中a道口距D信号机67 m,a、b道口间距100 m,c道口距J信号机100 m,在列车接近后a、b道口同时关闭,道口宽度忽略不计,道口最小开放时间均为Tmin=10 s,如图5所示。

图5 C、D站含道口区间示意Fig.5 Schematic diagram of the section from Station C to Station D with three level crossings
根据MATLAB计算及综合分析,C站发车后56.52~79.74 s内D站可向区间发车,C、D站最短发车间隔为56.52 s,C、D站发车132.27 s后可同站追踪发车。执行程序后MATLAB绘制的两站列车运行时间与距离曲线如图6所示。

图6 C、D站间列车运行时间距离曲线Fig.6 Time-distance curve of the operation of departing trains between Stations C and D
6 结束语
本文对英标含道口线路的运行场景进行建模分析,得到了道口报警时间与初速度的关系。对多道口区间发车间隔进行分析计算,并用MATLAB软件对道口场景进行计算及仿真,得到最佳发车间隔的仿真结果。
研究表明,列车匀速接近道口的报警时间相对较长,减速接近道口的报警时间相对较短。当遮断信号机内方有多个道口时,第一个道口与最后一个道口之间的距离越大,则道口的报警时间越长,道口同时关闭,遮断信号机内方道口数量越少,则道口报警时间越短。经分析,对多道口区间可计算出车站合理的对向发车及追踪发车时间。
猜你喜欢
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2019年1期)2019-03-21
制造技术与机床(2018年10期)2018-10-13
铁道通信信号(2016年5期)2016-06-01
中学生理科应试(2015年7期)2015-12-28
采矿与岩层控制工程学报(2015年3期)2015-12-16
铁路通信信号工程技术(2014年6期)2014-02-28
铁路通信信号工程技术(2014年4期)2014-02-21
