面向车辆个体出行检测的卡口布设优化模型
2024-02-24 09:15:42乔文瑛黄敏张小兰
中山大学学报(自然科学版)(中英文) 2024年1期
乔文瑛, 黄敏,3, 张小兰
1.中山大学智能工程学院,广东 深圳 518107
2.广东省智能交通系统重点实验室,广东 深圳 518107
3.广东省交通环境智能监测与治理工程技术研究中心,广东 深圳 518107
4.广东工贸职业技术学院,广东 广州 510510
城市交通大脑旨在利用实时全量的交通数据全局优化城市交通资源,实现城市运转效能的根本提升(谢一明,2022)。在车辆个体身份感知方面,相比于其他传统的交通传感器,交通卡口能够结合图像处理技术,实现细粒度更高的车辆识别,但受成本等因素限制很难实现路网全覆盖,需要制定科学合理的选址方案,以满足检测需求。
大量学者对传统检测器的布设进行了优化。何胜学等(2016)提出了一种图论算法,以流量检测为目标优化定量线圈的布局。Hu et al.(2009)提出了一种基于路段来表示路网结构的方法,通过检测器布设能够在稳态条件下准确估计所有链路流量。Xu et al.(2016)和Salari et al.(2019)引入检测器故障或其他不确定因素,通过最小化先验路径流量不确定性,优化检测器布设。Yang et al.(1991)首次提出“最大可能相对误差”的概念,利用检测数据分析估计OD 矩阵的可信度。刘明等(1993)对该方法做了进一步研究。杨晓光等(2011)依据不同的OD 矩阵估计模型进行布点优化。Hao et al.(2022)利用协方差衡量不同时期OD需求的相关性,通过最小化OD 需求估计的不确定性来优化多类型交通检测器的布设。Kim et al.(2011)基于微观交通仿真,研究检测器布设位置对旅行时间估计的影响。Danczy et al.(Danczy et al.,2011;Danczy et al.,2016)通过最小化旅行时间估算误差来优化交通检测器布设方案。Jenelius et al.(2018)研究了在城市路网背景下,利用AⅤⅠ检测器、浮动车等移动检测器对旅行时间进行检测估计。
近年来,也有部分学者研究了视频监控点的选点规划。刘畅(2015)提出“全范围无盲区,交互构成封闭”的摄像机布设原则,以实现流量出入监测和重点区域监测等目的。逯峰等(2016)使用机器学习挖掘卡口布设与时空要素的关系,针对未来的路网空间进行了卡口布设优化。2017 年,He et al.(2018)首次在车辆交通和摄像头位置之间建立联系,以实现更好的安全监控。沈凌等(2021)针对桥梁覆盖率、重要场所出入口覆盖率和关键性节点覆盖率等指标,研究了城市道路监控设备布设方案评价方法。
综上所述,由于传统检测器获取的信息有局限性,如仅能检测道路截面信息、主要检测宏观信息等,目前的研究大多为面向宏观交通状态检测的传统检测器布设,而针对卡口检测器布设的研究较少。因此,本文将以有向路网为研究对象,在保证流量检测和OD 检测的基础上,从车辆出行轨迹重构效果最优出发,将缺失轨迹离散度作为表征轨迹重构准确度的参数,构建了卡口布设优化问题模型和求解框架,并通过算例验证模型的可行性。
1 问题描述
本文以有向路网为研究对象,如图1所示。在当前卡口布设下,车辆veh1和veh2均存在轨迹缺失。面向个体出行检测优化卡口布设,就是要在卡口数量约束下布设卡口实现车辆轨迹重构可靠度最高。首先,对基本信息和相关概念做出阐述。文中所涉及的符号及其含义如表1所示。

表1 符号及含义Table 1 Symbols and Meanings

图1 示例路网Fig.1 Road network example
1.1 卡口分类
由于卡口设备的布设位置不同,其检测信息也有所不同。将卡口设备分为两类:
1)路段检测卡口:通常布设在路段中,可以检测所在路段流量、速度等宏观信息,也可以识别途径车辆的个体身份信息,精细识别车辆个体的时空状态。由图1 可见,路段检测卡口tq1可检测局部轨迹().
2)转向检测卡口:通常布设在交叉口进口道、高速公路出入口匝道处等,可以检测所在路段宏观交通信息,还可以识别车辆下游行驶路段。如图1 所示,转向检测卡口tp1可检测轨迹为
1.2 基于卡口检测序列的轨迹重构
1.2.1 可行路径集考虑到经济、省时等因素,大多数司机在两点间出行时,往往优先选择距离最短路径或较短路径,此类路径称为可行路径。可行路径定义为:在有向路网G=(V,E)中,规定起点F的最短路权为L(F) = 0,其他节点设为∞,遍历相邻节点,参照Dijkstra 算法,利用路段长度标记每个节点的最短路权L.设有路径rF,T=(… -- …),只要满足其中任一路段∈E,均有L(i) =L(j),则定义rF,T为由起点F到讫点T的一条可行路径(邹志云,1997)。任意两点间的所有可行路径即构成了两点间的可行路径集。
1.2.2 缺失轨迹重构原理基于车辆个体的单次出行卡口检测序列,将车辆每次出行时空轨迹通过卡口设备和路网关联关系映射到路网,可以得到卡口检测下的部分出行轨迹。进一步,对缺失部分进行重构,根据相邻两次卡口检测序列间的缺失情况,将其分为两种情况:(1)缺失部分只含一条可行路径;(2)缺失部分含多条可行路径。对于情况(1),可以利用唯一的可行路径直接补全缺失部分,定义为一次重构。对于情况(2),则需要在多条可行路径中确定一条最优轨迹,作为重构轨迹,定义为二次重构。在现阶段的研究中,不少学者利用卡口检测数据进行轨迹重构,主要方法包括:不基于交通流模型的方法、基于交通流模型的方法、混合模型方法(邢皓等,2019)。其中,不基于交通流模型的方法忽略拥堵和排队等交通动态模式,只利用时间、速度等数值计算方法对缺失的轨迹进行重构。在进行轨迹点还原的过程中,通常会针对两条确切轨迹之间轨迹缺失的部分,确定一组备选轨迹集。然后,引入路段数量、转弯次数、理论速度等决策属性,计算各备选方案与最优方案的接近程度,最终选取最接近的备选轨迹作为最优轨迹(杨帅等,2016)。
基于此原理,记两段确切轨迹A、B 之间的缺失轨迹集为MPAB={mpAB1,mpAB2,…,mpABm}.其中,对于某条缺失轨迹mpABi=(e1,e2,…,en),途径路段数记为ni,轨迹长度记为理论通行时间记为其中spek为路段ek的理论速度。因此,由m条缺失轨迹的属性值组成m× 3的初始决策矩阵,记为
对初始决策矩阵进行标准化,得到标准化决策矩阵
设置权重向量
对属性值赋权,备选轨迹加权属性值为
根据卡口序列记录的实际过车时间,计算理论轨迹属性值,最接近的备选轨迹即为最优轨迹。因此,基于本文提出的缺失轨迹一次重构和二次重构原理,能够创建相应指标以构建优化模型。
2 优化模型构建
优化模型的决策变量Q、P,为0-1 对角矩阵。路网原始布设矩阵表示为Q0、P0,对于无卡口的全新路网,Q0=P0= diag(0,0,…,0).
2.1 流量捕获率约束
基于卡口布设矩阵和路段流量矩阵计算流量捕获率大小,即卡口可覆盖的流量占路网总流量的比例,以衡量卡口对于路网在途车辆的检测情况。即
其中I=[1 1 … 1 ]1×n;Ζ= diag(z1,…,zn),表示路段ei是否存在卡口布设。且
即当路段布设至少一个卡口时,该路段流量可被捕获,否则不被捕获。
2.2 轨迹覆盖率约束
对轨迹缺失部分进行一次重构,具有较高的可靠度。本文定义轨迹覆盖率,以衡量卡口设备对车辆轨迹检测的完整性。假设某OD 量为XOD,其间有多条可行路径POD={p1p2…pi…},流量占比为FOD=[f1f2…fi… ] ,单条可行路径的轨迹覆盖率为一次重构后的局部检测轨迹权值占完整轨迹权值的比率ci, 记COD=[c1c2…ci… ].参考MⅠⅠACR 法(Feng et al.,2019),本文基于静态拓扑结构和动态GPS 数据对路段关键程度进行量化,轨迹权值即轨迹途径路段关键程度之和。基于此,OD 间所有轨迹的平均覆盖率为
整个路网所有OD对之间的轨迹覆盖率均值
其中sum表示路网中OD对数量。
2.3 缺失轨迹离散度优化
基于缺失轨迹二次重构的原理,用缺失轨迹离散度衡量二次重构的可靠性。对于确切轨迹A、B 间备选轨迹的加权属性值SAB=Γ·wT=[sAB1sAB2…sABm]T,用方差衡量备选轨迹集MPAB的离散度。有
面向出行轨迹重构最优,本文以最大化路网缺失轨迹离散度SD为优化目标,优化模型如下:
其中ΔQ、ΔP表示新增布设矩阵。式(12)-(14)依次对卡口数量、监测流量、覆盖轨迹进行了约束,从而保证一定程度的轨迹监测;在此基础上对缺失轨迹离散度进行优化,实现了更有效可靠的轨迹重构与检测。
3 求解算法
考虑到实际路网的规模大小,优化模型的求解为NP-hard 问题,难以采用传统的精确算法进行求解。因此,本文采用粒子群算法(PSO,particle swarm optimization)求解模型近似最优解。PSO算法通过群体中个体之间的协作和信息共享来寻找最优解,具体流程如图2所示。

图2 粒子群算法流程图Fig.2 Flow chart of particle swarm optimization
4 算例分析
4.1 案例路网
以广州市海珠区某局部区域路网为例,路网拓扑见图3。过滤孤立点、孤立路段等要素,经过预处理后的路网共有44 个节点,124 条有向路段,当前已布设17 个交通检测卡口,包括7 个转向检测卡口和10 个路段检测卡口;遵循经验,其布设主要分布于外围主干路,缺少对次干路、支路的轨迹检测(图4)。在当前实际卡口布设方案下,整体路网的流量捕获率为12.89%,轨迹覆盖率为74.00%,缺失轨迹离散度为0.036。

图3 研究区域局部路网Fig.3 Local road network in the study area

图4 当前布设下的检测轨迹与缺失轨迹Fig.4 The monitored trajectory and missing trajectory at present
4.2 无基础卡口的全新布设
将案例路网看作无基础卡口的全新路网,采用PSO 算法求解优化模型。以当前布设方案相关指标为阈值,设置模型参数Nmax= 17,Vmin= 12%,COVmin= 70%,T= 500,求解得到的卡口布设优化方案如图5 所示,对路网的检测情况如图6 所示。结果表明,与当前布设相比,优化方案更多地兼顾了次干路、支路级布设规模,提升了卡口设备检测细粒度。路网整体指标如表2所示。对比路网整体指标,可以发现:优化方案整体路网流量捕获率为19.09%,轨迹覆盖率为76.76%,缺失轨迹离散度为0.086。与当前实际布设方案相比,优化方案在流量捕获率方面提升了6.20%,轨迹覆盖率提升了2.76%,缺失轨迹离散度提升了139%。与传统的两类布设方案相比,优化方案在轨迹检测方面均表现出更优的效果。

表2 路网整体指标对比Table 2 Comparison of overall road network indicators

图5 卡口布设优化结果Fig.5 Bayonet layout optimization results

图6 优化布设下的检测轨迹与缺失轨迹Fig.6 The monitored trajectory and missing trajectory after optimizition
在广州市2021年8月29日的车辆GPS数据中,随机选取研究区域内的100条车辆出行轨迹,对比优化前后卡口布设方案的轨迹覆盖率(见图7 和表3)、轨迹重构准确率情况(见图8 和表4)。结果表明,优化方案在加强轨迹检测和车辆个体出行轨迹重构方面取得了更优的效果。同时,受限于卡口设备数量,仍有个别轨迹检测率和轨迹重构准确率较低,需通过增加卡口数量进一步完善。

表3 随机100条轨迹的轨迹覆盖率区间对比Table 3 Comparison of track coverage interval of 100 random tracks
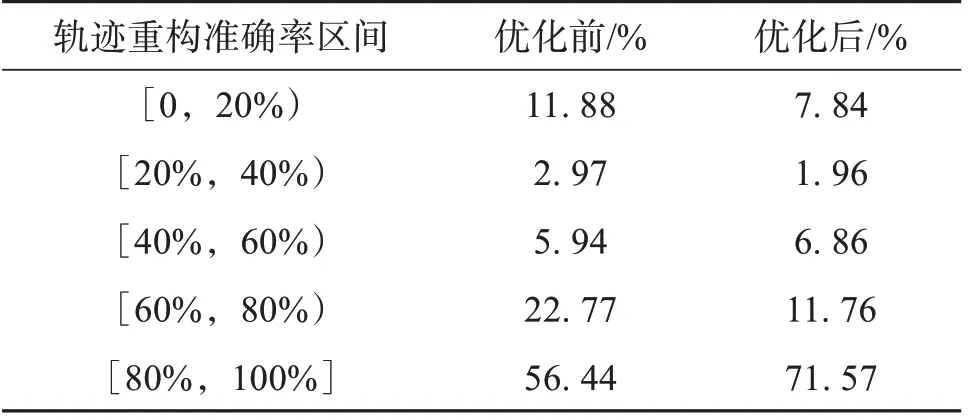
表4 随机100条轨迹的轨迹重构准确率区间Table 4 Accuracy intervals of track reconstruction for 100 random tracks

图7 随机100条轨迹的轨迹覆盖率Fig.7 Track coverage of 100 random tracks

图8 随机100条轨迹的轨迹重构准确率Fig.8 Track reconstruction accuracy of random 100 tracks
4.3 有基础卡口的新增布设
以当前卡口布设为基础(即Q0、P0已知),新增卡口以实现最优检测目标。模型约束条件同上,Vmin= 12%,COVmin= 70%,以缺失轨迹离散度为优化目标,依次新增1-6个卡口进行模型求解。新增5 个卡口的位置和新增卡口布设优化结果如图9和表5 所示。结果表明:随着新增卡口数量的增多,各指标均表现出上升状态。以N= 5 为例,在江南大道、紫丹大街、宝业路、怀德大道新增路口卡口,在紫金大街新增路段卡口,可以获得最优的效果,相应位置如图9 所示。在此新增方案下,流量捕获率为16.07%,轨迹覆盖率为74.91%,缺失轨迹离散度达到0.12。

表5 新增卡口布设优化结果Table 5 Added bayonet layout optimization results

图9 新增5个卡口位置示意图Fig.9 Position of five bayonets added
5 结 论
针对有向路网,从轨迹重构效果最优角度出发,本文面向车辆个体出行检测任务构建了卡口布设优化模型。并以广州市海珠区某局部路网为例,对全新布设和新增布设两类应用场景进行了算例分析,结果表明:在全新布设下,优化布设方案比当前方案的流量捕获率提高了6.20%、轨迹覆盖率提高了2.76%、缺失轨迹离散度提高了139%,能够有效提升轨迹检测力度和轨迹重构可靠性,在车辆个体出行检测任务中发挥更好的效益。在新增布设下,分别对新增1-6个卡口进行求解,得到了新增位置及最优解。在未来,还可以拓展模型的应用场景,调用不同的指标,制定可兼容多功能的卡口布设优化方案,以达到更佳的布设效果。或者将卡口与其他检测器相结合,考虑多种类检测器的布设优化。
猜你喜欢
摄影之友(2018年12期)2018-12-26 08:53:42
环球飞行(2018年7期)2018-06-27 07:25:54
中国公路(2017年11期)2017-07-31 17:56:30
中国公路(2017年7期)2017-07-24 13:56:29
中国公路(2017年10期)2017-07-21 14:02:37
中国交通信息化(2017年9期)2017-06-06 07:14:57
工业设计(2016年11期)2016-04-16 02:49:43
中国交通信息化(2015年6期)2015-06-06 03:46:35
中国交通信息化(2015年5期)2015-06-05 03:57:30
家禽科学(2015年6期)2015-05-30 10:48:04