基于主从控制技术的配网带电作业机器人研制
2024-02-21 03:50李长鹏吴小钊宋伟崔宇
机械制造与自动化 2024年1期
李长鹏,吴小钊,宋伟,崔宇
(1. 许继集团有限公司,河南 许昌 461001; 2. 国网重庆电力公司电力科学研究院,重庆 400074;3. 许继电气股份有限公司,河南 许昌 461001)
0 引言
进入新世纪以来,国家经济已由高速增长阶段转向高质量发展阶段,对于电力的需求将不断增加,对供电质量同时提出了更高的要求。为提高供电可靠性和优质服务水平,持续优化用电营商环境,国网与南网两家电网公司将进一步推进带电作业工作。依据《Q/GDW 10520 10kV配网不停电作业规范》,主要开展4类33项作业项目,涵盖了中压10kV架空线路及电缆线路,可在用户不停电的情况下,实现对所有配网线路设备开展检修作业。目前,我国的带电作业方式仍然大都是人工带电作业,作业人员处于高电压、强电场环境,升空频繁、精神紧张,容易引发人身伤亡事故,人工带电作业安全性问题急待解决。配网带电作业机器人不但可以排除高空、高压等危险因素,同时也将作业流程标准化、自动化,提高工作效率和质量。研制具有更强安全性和适应性的带电作业机器人,克服人工带电作业的困难性和局限性,代替人工进行带电作业是非常紧迫和必要的需求,也是新时代的要求。
本文针对配网不停电的断、接引流线作业项目实际需求,结合作业流程要求与实际线路工况情况,研制一种10kV配网带电作业机器人,实现10kV线路在不停电情况下,完成断、接引流线作业项目。
1 配网带电作业机器人方案
配网带电作业机器人从整体结构上主要有两种形式[1-2]:一种是作业人员在绝缘斗臂车绝缘斗内,通过控制主手控制器对机器人进行高空作业控制的形式;另一种是作业人员位于地面,通过视觉系统完成遥控的形式,如图1所示。

图1 配网带电作业机器人
作业人员以绝缘斗臂车作业移动绝缘承载平台在高空进行遥控,直接处于作业现场,减少了复杂环境的识别与避障问题,降低了操作难度,提高了作业效率,但这样未能使作业人员完全脱离高压和高空作业的危险。作业人员在地面或远程操控虽不能直接直观面对真实的作业环境,作业效率会降低,但该种作业模式可使作业人员远离高压线路,可避免触电和高空跌落事故的发生。
本文研究的配网带电作业机器人采用的是第二种方案。通过多角度的视频采集器,为作业人员提供更真实的现场作业环境,为简化机器人控制系统的复杂性,提高作业人员作业的效率与精度。基于机器人的主从随动操作技术,设计适合配网带电作业的主从操作手,研制的配网带电作业机器人在作业过程中结合人类的智慧及作业经验,高效可靠地完成不停电的断、接引流线作业任务[3]。
2 机械臂运动学分析
根据我国现有的10kV线路的安装标准和带电作业安全距离要求,确定图2的机器人工作空间坐标,并求解出带电作业所需机械臂的最大臂展加带电作业工具的长度和下限为1 305mm。为增加带电作业范围及作业时的灵活性,作业机械臂采用了6自由度关节型机械臂[4]。带电作业机械臂结构如图3所示。

图2 机器人工作空间示意图

图3 带电作业机械臂示意图
2.1 机械臂坐标系与D-H模型
机器人运动学分析包括运动学正分析和逆分析。运动学正分析是已知关节空间中机器人关节变量,求解笛卡儿空间中的机械手末端位姿问题。正向运动学适用于主从控制操作模式,通过作业人员的操作完成配网带电断、接引流线作业项目。运动学逆分析则实现笛卡儿空间到关节空间中的变换,即已知机械手末端位姿求解关节变量,逆向运动学适用于自主控制作业模式,通过视觉识别系统,识别带电线路主线和支线的位置,确认具体位置后由机器人自主完成作业项目。
由配网带电作业项目及流程分析可知,开展断、接引流线的作业过程中,如夹持引流线、穿引流线到线夹、接火作业等操作,双臂通过主从作业或自主作业协调完成工作时,可简化为单臂运动另一个静止的工作方式。该种作业方式能够简化控制系统的复杂程度,降低错误率,避免双臂之间的碰撞,且不影响作业效率。按照改进的D-H法建立机械臂坐标系(图4),机械臂D-H参数如表1所示。

表1 机械臂D-H参数表

图4 机械臂D-H坐标系
2.2 机械臂正运动学分析
针对配网带电作业机器人的主从作业功能进行研究,故仅对机械臂的正运动学进行分析[5]。机械臂的正运动学求解是在己知机器人的各关节θi变量(i=1,2,3,…,6)的情况下,计算出机械臂末端执行器的位置。对机械臂建立连杆坐标系后,通过矩阵运算可以导出相邻连杆间坐标系变换的一般形式。因此连杆i相对连杆i-1变换矩阵可表示为
(1)
式中:sθi为sinθi;cθi为cosθi,所以可以求得:
(2)
用n表示从机械臂末端关节的法向向量;ο代表从机械臂末端关节的滑动向量;a表示机械臂末端关节的接近向量;p表示从机械臂末端关节的末端位置坐标。

可确定末端执行器笛卡儿坐标系的位置为
(3)
θz=αtan2(ny,nx)
(4)
(5)
θx=αtan2(oz,az)
(6)
2.3 机械臂正运动学仿真
配网带电作业机器人末端机械臂运动学的建模是实现关节空间轨迹规划及关节控制的基本条件,分别通过机械臂的运动学方程式(1)和D-H参数在Matlab中构建仿真模型进行计算,并通过对比实现机械臂正运动学的求解及验证推算的准确性。
为避免存在偶然性,假定机器人处于作业准备位姿状态时的各关节角度q1如下:
(7)
则机械臂变换矩阵的计算结果为
(8)
基于Matlab Robotics Toolbox软件构建末端机械臂的模型[6],并对其进行运动学正解的仿真验证。利用工具箱中SerialLink函数及teach函数构建具有可视化末端机械臂模型,如图5所示。通过图中的滑块控制器调节各关节的角度可控制机械臂的位置变化。通过fkine函数读取此时的具体位姿数值,程序及运行结果为:

图5 机械臂模型与滑块控制图
L(1)= Link([0,0.163,0,pi/2,0] , 'modified');
L(2)= Link([pi/2,0,0.647,pi,0] ,'modified');
L(3)= Link([0,0,0.6005,pi,0] ,'modified');
L(4)= Link([-pi/2,0.2013,0,-pi/2,0] ,'modified');
L(5)= Link([0,0.1025,0,pi/2,0] ,'modified');
L(6)= Link([0,0.094,0,0,0] ,'modified');
Six_Link = SerialLink(L,'name','末端机械臂');
Six_Link. plot([0,0,0,0,0,0] ); teach(Six_Link);
T = Six_Link. fkine([0,0,0,0,0,0] );
经比较,仿真结果与计算结果一致,证明末端机械臂正运动学仿真是正确的,故可实现末端机械臂作业过程中的精准控制。
3 主从操作手设计
3.1 主从遥操作主手结构设计
目前行业内主从操作主手有外骨骼式和手持式两种模式,其中外骨骼式主从遥操作主手(以下简称主手)在操纵6自由度机械臂时,可以直接将手臂上的各关节参数映射到末端机械臂上。操控者结合自己的经验与智慧将手臂的运动转化为机械臂的运动控制信号,所以主手的设计应该尽量能够适应操作者的上肢运动[7]。
根据配网带电机器人末端机械臂的结构特点和手臂各个活动关节的分布,确定主手的设计方案。主手穿戴于人体上肢,故其设计离不开对人体上肢的运动机理进行分析。在分析操作者上肢的生理结构及其生理尺寸后[8],以主手相互交互的人体上肢作为切入点,并结合6自由度协作性机械臂特点,完成配网带电作业机器人主从遥操作主手的设计。人体的手臂结构如图6所示,主要包括肩部、上臂、前臂及手部。所以,可简化腕部关节的3个自由度、肘部关节的1个自由度和肩部关节的3个自由度共7个自由度。为便于操控者适应多种作业项目,在主手的末端及人体上肢手掌部设有操作手柄,可用于带电作业工具的控制或机械臂的微调操控。

图6 人体上肢结构图
文献[9]介绍了上肢日常活动中所能达到的运动范围,结合机械臂的各关节角度运动范围,可确定主手各关节转动范围如表2所示。配网带电作业机器人主手尺寸需参考成年人人体的坐姿,如表3所示。

表2 主手各自由度运动范围 单位:(°)

表3 主手尺寸 单位:mm
在配网带电作业机器人系统中,操控者感知配电线路环境信息,并借主手与末端机械臂完成作业内容。主手的结构形式对信息测量的准确性及传输的实时性、操作者操作的方便性、工作效率的高低都有很大的影响。因此,主手是带电作业机器人系统中的核心部分,关系整个作业过程的安全和高效率。配网带电作业机器人的主手结构及其机构简图如图7和图8所示。

图7 主手结构

图8 主手机构简图
3.2 主手控制策略
项目研制的10kV配网带电作业机器人具备主从作业功能和自主作业功能。作业过程中作业人员可根据线路实际情况选择合适的作业模式,并且两种作业模式可以随意切换。配网带电作业机器人系统框图如图9所示,本文仅对配网带电作业机器人的主从作业功能进行介绍。

图9 配网带电作业机器人系统
主从遥操作机器人有两种类型分别是主从同构型机器人和主从异构型机器人。虽然主从异构型主手更充分考虑人体工程学,操作更舒服,并且可以匹配多种不同结构的从端机器人,但机器人控制问题相较于主从同构的要复杂很多。结合配网带电作业机器人在作业过程中的需求,可采用简单的关节-关节控制方法即可实现主从控制,再配合主手末端手柄的按键功能将手腕等操作不便的关节代替。
对于机械臂的主从运动控制方法主要有关节空间控制方法与笛卡儿空间控制两种方法。其中笛卡儿空间控制方法还具体包括绝对空间映射、增量空间映射和雅克比映射等[10]。本文采用的是关节空间控制方法,如图10所示。主手的每个关节集成高精度旋转电位器,用来检查各关节的运动信息。当操控者想要控制机械臂完成抓取引流线或接引流线等作业内容时,操控者的手臂运动参数位移,主手上的电位器检测到角位移并传递给末端机械臂的控制器。

图10 关节空间控制方法
从主手上使能按键按下发出指令,一个运行周期内动作模拟信号传递给主手控制器、经工控机通过上下两个光纤交换机至机械臂控制柜,最后通过内部通信实现机械臂的伺服控制。主从操作动作时序示意如图11所示。

图11 主从操作动作时序示意图
一个运行周期的控制指令信号通过软件源代码的一个程序计算出从主手发出指令开始至机械臂控制柜的一个延时时序。一个运行周期的控制信号从机械臂控制柜至机械臂采用的是内部CAN通信,伺服控制,常规延时为2ms。根据伺服控制及传输方式等经验判断这段延时不会大于5ms。将两段延时时间加到一起即为总共延时时间,大概在60~80ms范围内。
4 配网带电机器人测试
4.1 配网带电作业机器人电磁兼容检测
为保证配网带电作业机器人在配电线路中的运行可靠性,对其进行图12所示的静电放电抗扰度检验(①为接触放电(间接放电)部位;②为空气放电部位)、射频电磁场辐射抗扰度检验、工频磁场抗扰度检验和阻尼振荡磁场抗扰度检验的电磁兼容检测试验,检查结果均为合格满足相关标准要求。
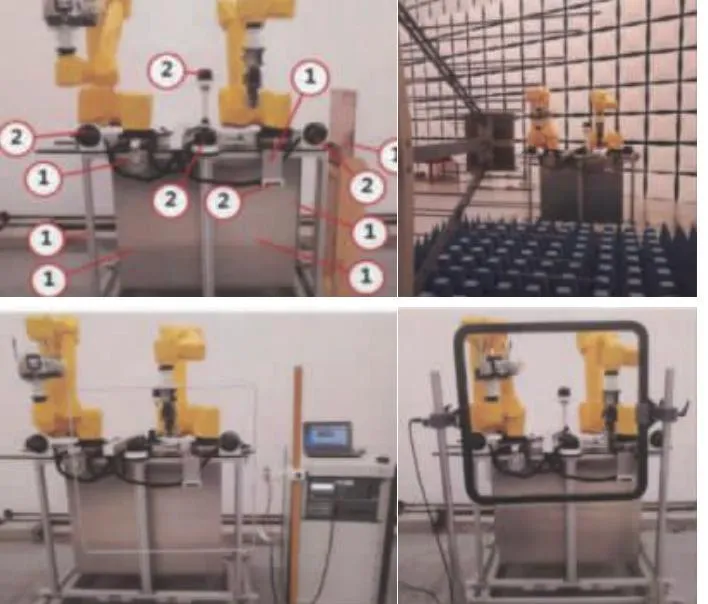
图12 电磁兼容检测试验图
4.2 配网带电作业机器人电磁兼容上杆测试
结合人工断、接引流线作业流程,在品字形单回路配网线路上开展配网带电作业机器人测试。按照如下步骤进行断、接引流线作业测试。
1)接引流线作业试验
a)将机器人及绝缘承载平台调整至主导线下侧适当位置,启动引流线抓取程序;
b)通过控制终端上给出的多角度视频,操控主手控制1号机械臂抓牢引线,然后运动到引线与线夹安装位置;
c)控制2号机械臂带动接线工具到达引线末端位置并完成引线与线夹穿线作业;
d)通过地面控制终端确认相线接线位置;
e)操控主手控制2号机械臂完成接线作业;
f)全部工作完毕后,将机械臂收回至初始位置;
g)将绝缘承载平台移动至指定位置。
2)断引流线作业试验
a)将机器人调整至近主导线下侧适当位置,启动断线程序;
b)操控1号机械臂抓牢引线,地面控制终端显示引线断线位置;
c)通过地面控制终端确认引线剪断位置;
d)操控2号机械臂到达指定位置,通过断线工具将引线剪断;
e)2号机械臂收回至初始位置,1号机械臂控制引线降低至合适位置;
f)全部工作完毕后,将机械臂收回至初始位置;
g)将绝缘承载平台移动至指定位置。
按照以上作业流程,可完成1相的断、接引流线作业内容,其他相按照此流程重复作业,配网带电作业机器人断、接引流线作业测试如图13—图16所示。

图13 接引流作业—远相

图14 接引流作业—中相

图15 接引流作业—近相

图16 断引流线作业—近相
5 结语
针对配网不停电的断、接引流线作业项目的实际需求,为解决带电作业工人的高风险、高强度作业等问题,本文研制了一种基于主从随动操作技术的配网带电作业机器人,可代替人工在高温环境下开展不停电作业。结合人体上肢结构特点,采用关节空间控制方法的主手并将末端手柄集成关节控制按键以适应人体工程学的需求。基于全景视觉采集器主从控制作业,可结合作业人员的智慧和丰富经验完成配网线路下不停的电断、接引流线作业内容。实验结果表明,在配电网线路复杂的电磁环境下,主从操控可靠稳定,未出现卡顿现象。下阶段将双目相机立体成像技术和机器人路径规划技术相结合,使成像增加实感,增强定位的精确性与复杂环境的适应性,以实现配网带电作业机器人面对真实复杂线路情况下的自主作业功能。
猜你喜欢
VOGUE服饰与美容(2019年10期)2019-12-02
经济技术协作信息(2018年33期)2018-12-06
电子测试(2018年18期)2018-11-14
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
制造技术与机床(2017年6期)2018-01-19
电子测试(2017年23期)2017-04-04
现代工业经济和信息化(2016年4期)2016-05-17
电测与仪表(2016年24期)2016-04-12
探测与控制学报(2015年4期)2015-12-15
组合机床与自动化加工技术(2014年12期)2014-03-01