
双喉道Ludwieg管风洞启动过程及其有效运行时间延长
2024-02-20 03:59李创创李志远张振辉
气体物理 2024年1期
李创创, 李志远, 张振辉, 吴 杰
(1. 华中科技大学航空航天学院, 湖北武汉 430074; 2. 中国空气动力研究与发展中心, 四川绵阳 621000)
引 言
高超声速飞行器由于其高速度、 强机动、 超远程等特点, 是当今世界航空航天强国的研究热点, 具有重要的军事战略意义及广阔的民用应用前景[1]。高超声速飞行器趋向于临近空间发展, 在大气层内飞行时间长, 所涉及的飞行环境、 速度以及气体流动特性十分复杂, 给气动研究带来了巨大挑战。通过近几十年的研究, 研究人员在高超声速流动领域积累了大量的理论基础与经验, 但是高超声速空气动力学仍存在诸多难点问题。虽然计算空气动力学已成为飞行器精确、 高效设计的预测手段, 但在高超声速流动领域由于流动机理十分复杂, 如高超声速湍流建模、 高温下多物理场耦合与非化学平衡状态等, 数值方法不能完全刻画其流场演化[2-5]。对于一些特殊的流动现象, 如层流、 湍流边界层转捩以及激波-边界层相互作用机理[6,7], 目前还无普适的数值模型能够进行预测, 因此需要通过地面气动试验与真实飞行试验相互配合来研究, 以降低飞行器设计中的不确定性。虽然飞行试验能够获得丰富且更真实的试验数据, 但飞行试验成本昂贵且测试手段也受到较大约束。同时常规超声速及高超声速风洞设备建设成本昂贵, 风洞的运行和操作也较为复杂, 提高了科研机构进行基础研究的门槛[8,9]。随着我国国防事业的发展, 飞行器设计的战术技术指标要求不断提高, 意味着对风洞试验技术也有了更高的要求, 风洞试验趋向于高精度、 低成本和精细化等方向发展[10]。
在高超声速风洞中, Ludwieg管风洞由于其基于中心膨胀波的运行模式, 具有来流Reynolds数高、 流场重复性好、 流场稳定等优点[11]。最初, Ludwieg[12]将该设施设计为在高Reynolds数下进行亚声速/跨声速试验的低成本替代方案。由于Lud-wieg管风洞具有能够产生低湍流均匀自由来流的优点, 后来被用于高超声速试验[13,14]。典型Ludwieg管风洞由长直储气段、 Laval喷管、 试验段和真空罐组成, 通过这种设施可以产生相对较长的运行时间(0.1~0.2 s)、 较大的试验截面和较高的Reynolds数(5×106~50×106m-1)的高超声速流场。为了进一步提高Ludwieg管风洞的运行效率, 德国宇航院Koppenwallner等[15]研制了适用于Ludwieg管风洞的快开阀控制系统, 大幅度提高了该类风洞的试验效率, 并降低了风洞的运行成本。虽然Ludwieg管风洞能够以较低的建设和运行成本实现高质量的高超声速流场, 但其存在以下不足: 首先, Ludwieg管风洞的设计Mach数单一, 向低宽Mach数拓展存在困难[16]。其次, 由于气体重力作用, 储气段内气体加热不均匀, 从而产生较大的熵波扰动[17,18]。再者, 快开阀对Laval喷管喉部上游流场的干扰会增加试验段自由流扰动幅值[19]; 同时, 阀门形成的涡脱落也会在风洞流场中引入一定的涡波扰动[20]。上述扰动源的引入会显著降低风洞的流场品质。为了将高Mach数Ludwieg管风洞向中低Mach数扩展, Wu等[21]基于常规高超声速Ludwieg管采用双喉道气动布局, 即额外增加1个Laval喷管和用于连接两个喷管的稳定段; 第1喷管和稳定段联合起到节流作用, 可以低成本地实现将原有的Ludwieg管风洞向多个运行Mach数扩展。此外, 采用双喉道布局Ludwieg管风洞自由流扰动的特征表明, 稳定段可以相当大程度地消除来自快开阀及其他上游组件产生的干扰。Schrijer等[22]也采用了相同设计, 通过串联喷管的配置实现了风洞由高Mach数流动到低Mach数的转变。国内高亮杰等[23,24]详细分析了该气动布局风洞喷管的工作模态, 并采用非定常数值模拟技术研究了风洞的启动特性, 实现不同Mach数下的尺寸匹配。
然而, 按照Wu等[17]的设计思路, Ludwieg管风洞只能向低Mach数工况拓展, 传统的高超声速Ludwieg管风洞要消除来自Laval喷管上游部件的干扰仍存在较大难度。同时, Wu等[17]的设计中第1喷管的喉道面积比第2喷管要小得多, 导致两个喉道之间产生较大的总压损失, 会影响风洞的气动性能。针对该问题, Li等[16]设计了一种双喉道气动布局的Ludwieg管风洞, 使风洞的第2喉道截面积小于第1喉道, 数值模拟与实验结果均验证了该方案可行, 大幅提升了高超声速来流的流场品质, 且总压损失较小。但是, 由于第1 Laval喷管和稳定段的引入, 使该风洞的启动时间较长, 因此须对其启动过程进行进一步优化分析, 以期缩短采用该类气动布局风洞的启动时间。针对该问题, 对该双喉道布局的Ludwieg管风洞启动特性进行深入研究, 并重点对缩短风洞启动过程进行优化。文章首先介绍采用该双喉道气动布局的Ludwieg管风洞的工作原理; 之后, 对风洞的启动过程进行非定常数值模拟与分析; 而后, 将对第1段Laval喷管与稳定段进行融合设计, 并分析其对风洞的启动过程和流场品质的影响; 最后, 根据数值模拟结果, 确定进一步缩短采用该双喉道气动布局的Ludwieg管风洞运行时间的有效设计。
1 双喉道Ludwieg管风洞设计
1.1 双喉道Ludwieg管风洞运行原理
该双喉道Ludwieg管风洞结构与Wu等[17]以及Schrijer[25]描述的相似, 但由于第1喷管与第2喷管的喉道面积比大于1, 导致其工作原理完全不同。采用第1喉道较大的布局方式可以消除风洞稳定运行时第1喉道处的激波结构和由双喉道面积比引入的压力损失, 其气动布局如图1所示。
快开阀开启瞬间, 储气段内的高温高压气体首先通过第1喷管, 并在第1喷管喉道处发生壅塞。随后气体通过稳定段, 在第2喷管喉道处再次发生壅塞, 而后流动沿第2喷管扩张至设计的超声速流动。此时第1和第2喷管喉道处的流动均为声速流动, 膨胀波(图1中的OA和OB)向上游传播到储气段中。在该过程中, 第1喷管和第2喷管中的流动符合一维等熵流动控制方程。稳定段内气体的总压和总温用P1和T1表示, 储气段中气体总压和总温用P0和T0表示。流场建立初期, 流经第1和第2喉道的气体质量流量均可由下面的最大质量流量公式表示, 其中A*对应喷管喉道截面积。
在风洞的整个流场中, 忽略热传导, 可认为是绝热过程(T0=T1)。由于第1喉道面积大于第2喉道面积且P0大于P1, 所以风洞启动过程中流经第1喉道的质量流量大于第2喉道。稳定段内的气体质量增加使压力P1上升, 进而使通过第2喉道的质量流量增大, 同时稳定段内的流动逐渐转变为亚声速流动, 随后流经第1喉道的质量流量开始减小。一段时间后通过两喉道的质量流量会达到平衡, 此时风洞处于稳定运行状态, 声速点位于第2喉道, 第2喉道为整个流道的几何喉道。当膨胀波系经储气段末端反射回来到达第1喉道时, 风洞1个运行周期结束, 快开阀随后关闭。
该风洞布局中, 稳定段内的主要扰动来源是阀门的涡脱落和第1喷管与稳定段交接处附近的流动分离, 都属于涡波扰动, 扰动形式较为单一。该气动布局总压损失较小, 并且在稳定段中容易设计整流措施, 因此通过该风洞实验平台可以获得更高质量的自由来流。但这种气动布局会使风洞的启动耗时较长, 须对其启动过程进行研究。
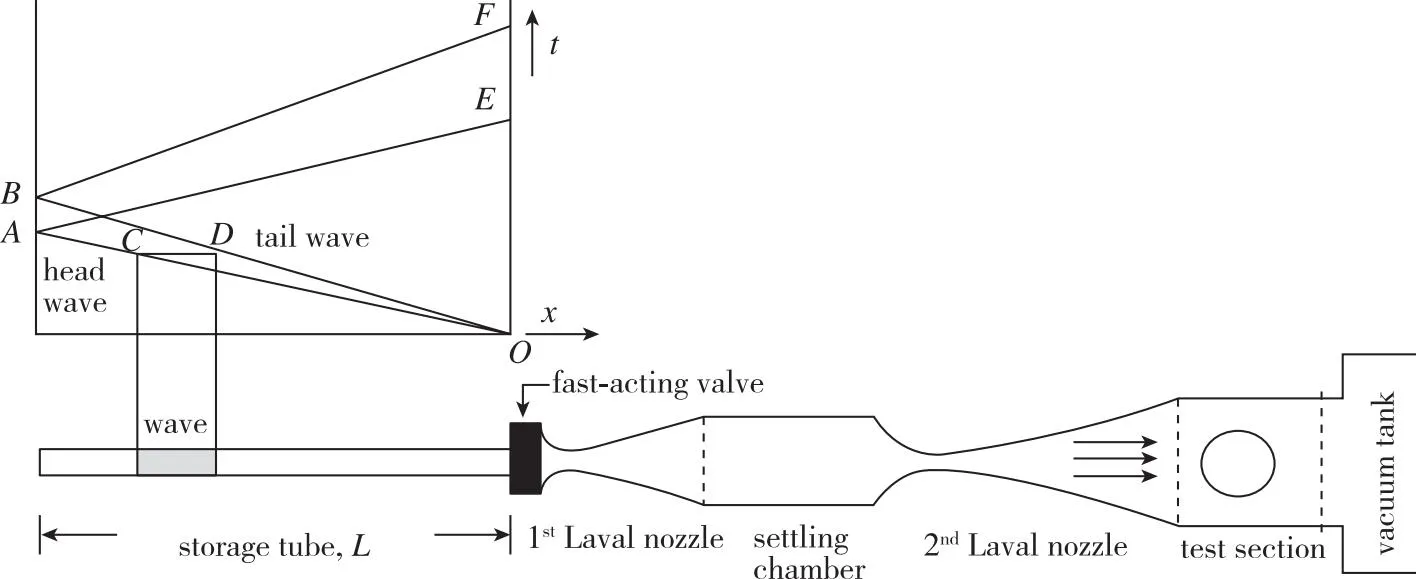
图1 新型双喉道Ludwieg管风洞运行原理图[16]Fig. 1 Operation principle of new double-throat Ludwieg tube wind tunnel[16]
1.2 第1 Laval喷管与稳定段设计
风洞运行稳定时, 第1喷管与稳定段内的流动均为亚声速流动, 所以无须使用特征线法进行设计。同时在第1喷管喉道出口处预期会存在微弱的射流效应, 在靠近壁面区域可能存在流动分离, 因此第1喷管型线无须进行精细化设计。其中, 第1喷管收缩段采用Witoszynski方法, 其型线表达式如下
式中,y为横坐标为x处的截面半径,y0为喉部半径,yi为收缩段入口半径,Li为收缩段长度。
为了方便实现第1喷管与稳定段的融合设计, 喷管扩张段出口采用5次曲线并引出与之相切的直线与稳定段相连, 保证了第1喉道出口处的光滑过渡, 避免在该位置处产生激波干扰。第1喷管与稳定段的整体示意图如图2所示, 扩张段5次曲线公式如下
式中,yout为扩张段出口半径,Lexp为扩张段长度。

图2 第1 Laval喷管示意图Fig. 2 Sketch of the first Laval nozzle
第1喷管的收缩段和扩张段的出口半径与稳定段保持一致, 稳定段和扩张段总长保持不变, 因此喷管扩张角θ的大小决定了稳定段和扩张段的长度。稳定段的设计依赖于其内的流动状态, 为了使经过第1喷管加速后的流场便于通过阻尼材料进行整流来获得高质量流场, 稳定段内的流速通常被限制在Ma=0.1。根据Mach-面积关系式, 可由第1喉道面积获得稳定段半径, 而第1喉道面积受限于第1喉道与第2喉道面积比。
本次计算的风洞气动外形尺寸参考华中科技大学Φ0.25 m口径Mach数6 Ludwieg管风洞[26], 在本次计算中第1喉道与第2喉道截面面积比为 2.26, 稳定段出口到第1喉道的距离为720 mm, 第1喷管扩张角为17°, 第2喷管长度为1 400 mm。
1.3 数值设置
使用SU2代码对该风洞的启动过程进行非定常Reynolds平均Navier-Stokes(URANS)模拟, SU2代码能够预测高超声速流经复杂几何形状周围的黏性流动[27,28]。在本计算中, 采用的湍流模式为标准Menter SST 两方程湍流模型[29,30], 对流项格式采用2阶迎风格式[31,32]。出于稳定性考虑, 采用双时间格式, 并将物理时间步长限制为Δt=10-6s。每个物理时间步长的子迭代次数为40, 确保残差能够减少至少4个数量级。为了得到精确的结果, 流场采用结构化网格,y+均取1左右, 部分网格与边界条件如图3所示。储气段总长为22 m, 图中未完全画出。第2 Laval喷管沿流向和垂向的网格数目为480×60, 其余部分的网格生成采用了类似的网格密度, 并对喷管壁面处的网格进行加密处理。流场的边界条件定义如下: 风洞出口定义为压力出口, 所有的壁面指定为绝热无滑移壁面边界条件, 风洞轴线采用轴对称边界条件。

图3 网格划分与边界条件设置Fig. 3 Mesh topology and boundary conditions of flow field
风洞启动时, 快开阀可在5 ms内完成启闭, 快开阀开启过程对风洞启动过程的影响几乎可以忽略不计。因此在快开阀与Laval喷管喉部的接触面上布置了1个数值膜片, 以初始化流场并进行时间瞬态模拟。储气段的初始条件为总压1 MPa和总温434 K, 出口设置为压力出口条件, 出口压力为100 Pa, 单位Reynolds数为Re/l=1.06×107m-1。
赵家权等[33]通过将 SU2 计算的结果与其他求解器进行比较, 检验了其求解高超声速流场的能力, 结果表明SU2和其他求解器吻合良好, 可用于高超声速管道流动模拟。
2 数值结果与分析
2.1 双喉道Ludwieg管风洞的启动过程分析
目前对该气动布局风洞启动过程研究较少且不够深入, 因此着重对风洞的启动过程进行分析。为了对风洞的启动过程有进一步的理解, 并确定该气动布局的可用性, 以及更好地对第1喷管与稳定段进行融合设计, 对该风洞的启动过程进行了非定常数值模拟。
图4展示了阀门开启后1~30 ms时刻从快开阀到试验段的Mach数分布情况。阀门开启后, 流动在初始高压比作用下首先在第1喷管喉道处达到声速, 然后超声速流动迅速占据整个稳定段并在第2喉道入口处形成壅塞流动。此时, 第1和第2喉道处的流动均为声速流动, 流动经过第2喷管膨胀加速至高超声速, 并在试验段内形成不稳定的高超声速流动。在t=2 ms时, 为了匹配两喉道截面处的流量, 稳定段内的压力开始增加, 第2喉道入口处的流动开始由超声速流动转变成亚声速流动并在收缩段内形成一个亚声速流动区; 该亚声速流动区逐渐沿风洞壁面向上游发展, 在t=5 ms时亚声速流动占据整个稳定段。之后第1喷管处开始出现微弱的射流现象, 并随时间逐渐增强然后减弱, 最后在t=30 ms时完全消失。此时风洞的流场已经建立, 第1喷管与稳定段内的流动完全为亚声速流动。
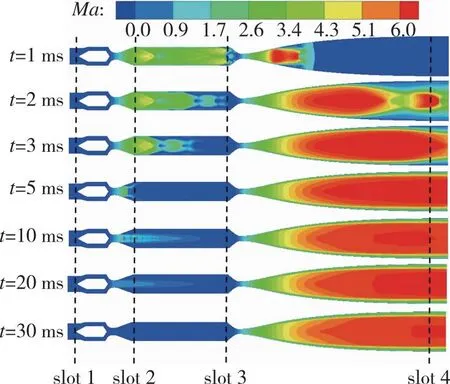
图4 风洞启动过程中不同时刻的Mach数云图Fig. 4 Mach number cloud chart at different times during the start-up process of the wind tunnel
密度梯度云图反映了风洞启动过程中流场内部的激波结构(如图5所示)。风洞启动瞬间, 超声速气流通过第1喉道并在第1喷管与稳定段的交接处产生斜激波。由于风洞流场的对称性, 斜激波会在风洞轴线上汇聚, 之后在风洞壁面与轴线间来回反射。由于能量的耗散, 激波强度沿流向逐渐衰减。随着稳定段内压力升高, 第2喉道入口处的激波结构开始消失并逐渐向上游过渡。t=5 ms时稳定段内的流动比较稳定, 第1喷管处于欠膨胀状态, 但却呈现典型过膨胀激波特征。激波后的逆压梯度导致边界层与喷管壁面分离, 在靠近壁面两侧形成λ形激波。随着稳定段与储气段出口压力比的进一步升高, 激波逐渐向第1喷管喉道处靠近, 并伴随出现一系列的激波串, 激波串的强度随时间逐渐减弱并消失。在t=30 ms时稳定段内流动完全为亚声速流动, 因此不存在激波结构。

图5 风洞启动过程中不同时刻的密度梯度云图Fig. 5 Density gradient cloud chart at different times during the start-up process of the wind tunnel
为了更清楚地了解稳定段内的流动情况, 图6给出了不同时刻稳定段内沿轴向的动量及流线云图。t=1 ms时, 在第2喉道入口处, 由于超声速气流流动发生壅塞而形成流动分离区。该流动分离区内的涡卷成股旋转着沿风洞壁面向上游流去, 并最终汇聚在第1喷管与稳定段的交接位置处, 在后续过程中导致了激波串的出现。即使流动达到稳定后, 稳定段内也存在较大的流动分离区, 第1喉道的核心流动区域从壁面分离, 该处的流动以恒定的面积向下游流去。由于流动分离区集中在第1喷管与稳定段交接位置处, 该区域内的流动可能会对稳定段内的流动产生新的干扰, 该扰动可能通过第2喉道进而对下游试验段内的流场产生影响。流动分离区的存在也会增加试验段内的总压损失。

图6 风洞启动过程中不同时刻沿轴线方向动量云图Fig. 6 Momentum cloud chart along the axis direction at different times during the start-up process of the wind tunnel
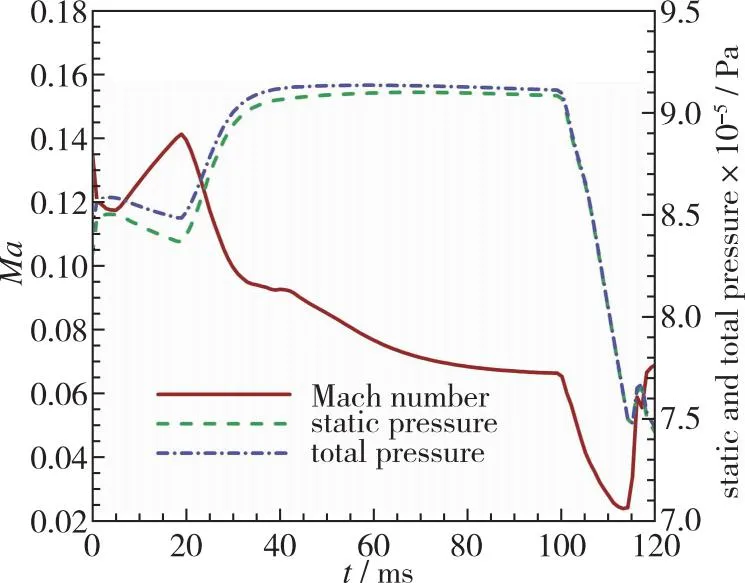
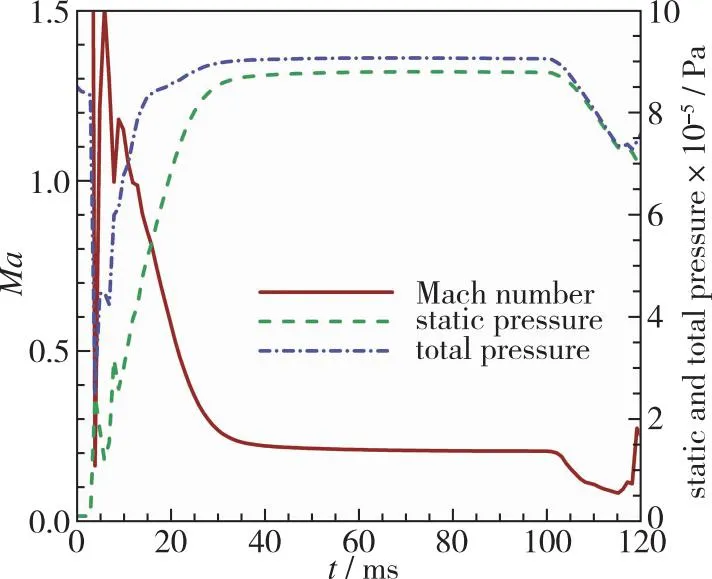
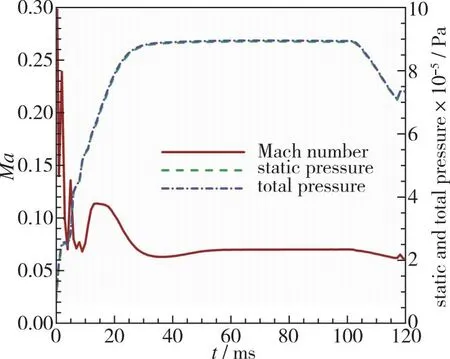
为了分析该风洞启动时的流动演化过程, 在图4所示的4个特殊流向位置提取Mach数和静压以及总压随时间变化的数据进行分析(如图7所示)。其中位置1~4分别位于储气段出口、 稳定段入口、 稳定段出口和试验段内位置处, 数据提取点距离风洞轴线法向10 mm处。
(a) slot 1
(b) slot 2
(c) slot 3

(d) slot 4
储气段出口处(如图7(a)所示)的Mach数在20 ms前后先增大后减小, 在40~100 ms之间基本保持不变, 对应于双喉道Ludwieg管风洞的有效运行时间。储气段出口处压力在启动过程中先下降, 直到第1喉道不存在声速流动; 此时第1喉道处激波串完全消失, 储气段压力才开始逐渐上升, 通过第1喉道质量流量开始减小。然后储气段压力维持稳定并存在9%的总压损失, 100 ms后膨胀波再次到达快开阀, 风洞一个运行周期结束。在稳定段入口处(如图7(b)所示), Mach数一开始由于流动膨胀而增加, 随后稳定段内Mach数下降到亚声速流动。风洞运行时, 由于稳定段入口Mach数仍然较高, 稳定段入口静压值与总压值相比较小。值得注意的是, 在10 ms前, 稳定段入口Mach数和压力存在两次急剧的波动。从前面的分析可以看出, 第1次波动是由流动在第2喉道处发生壅塞、 亚声速区向上游过渡导致的, 而第2次波动是受此处激波串的出现和消失的影响。在稳定段出口(如图7(c)所示)观察到同样现象, 但两次Mach数波动的幅值明显减小。随后Mach数又出现明显的上升和下降趋势。该趋势是由第1喷管处的射流效应导致的, 从侧面反映了当激波串逐渐消失时, 随后射流效应的影响区域逐渐扩大然后又逐渐减小。从位置1, 2, 3中的压力变化可以看出, 稳定段内的质量流量匹配过程以第1喉道不存在声速流动为节点, 可以分为两个阶段: 在0~18 ms时间段内通过第1喉道的质量流量基本不变, 而通过第2喉道的质量流量逐渐增大, 该阶段稳定段内的流场结构复杂, 流动较为混乱, 是流场结构趋于稳定的过程; 在18~34 ms时间段内, 通过第1喉道的质量流量逐渐减小而通过第2喉道的质量流量逐渐增大, 该阶段稳定段内流动为亚声速流动, 无激波结构存在, 是储气段与稳定段内压力的匹配过程。
图7(d)描绘了试验段内Mach数和压力的演化过程, 其中前30 ms是流场演化所需的时间; 30~100 ms, 风洞处于稳定运行状态, Mach数和压力基本保持不变。风洞稳定运行时, 从储气段到试验段中的总压基本保持不变, 并维持在0.9 MPa左右。由此说明, 该气动布局带来的额外总压损失基本可以忽略不计, 总压损失主要来源于风洞启动时产生的总压损失。
从图7(c)、 (d)可以看出, 压力在稳定段内达到稳定大约需要34 ms, 这意味着该双喉道Ludwieg管风洞的有效运行时间为70 ms。值得注意的是, 静压达到稳定所需的时间比Mach数要长。因此, 应以试验段静压幅值波动小于1%为判断标准来评价后续风洞试验段的有效运行时间。
为了说明试验段内距离风洞轴线法向10 mm处的提取点数据能够用来评估风洞的有效运行时间, 选取距离风洞轴线法向10, 20, 30, 40 mm处数据进行分析(如图8所示)。可以看到不同位置点所体现的风洞有效运行时间基本相同, 采用距离风洞轴线10 mm位置处的提取点可以用来评估风洞的有效运行时间。
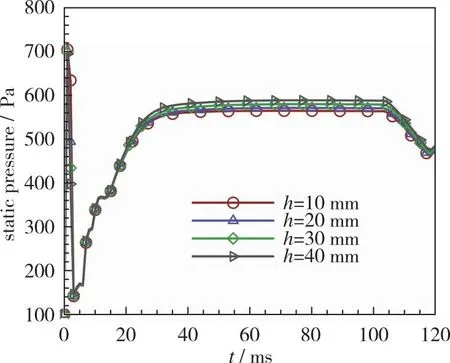
图8 试验段内不同法向位置静压分布Fig. 8 Static pressure distribution at different normal locations in the test section
为了进一步了解风洞稳定运行时稳定段内的流动情况, 图9给出了风洞启动后60 ms, 距离稳定段入口处0, 0.2, 0.4, 0.6 m位置处Mach数沿轴线法向方向的分布情况。可以看到, 稳定段内依然存在微弱的射流效应, 流动沿着稳定段发展, 流速降低的同时流动会更加均匀。流动在稳定段出口处的Ma<0.1, 能够满足稳定段的设计要求, 一般来说稳定段越长其匀流效果越好, 但会带来更长的风洞启动时间。
2.2 扩张段与稳定段优化设计
对图6的分析发现, 流动分离区主要集中在扩张段与稳定段的交接位置处, 因此可以通过减小扩张段的扩张角并保持稳定段与扩张段总长不变, 使喷管壁面占据部分分离区来减少稳定段内流场的演化时间, 进而减少风洞的启动时间。
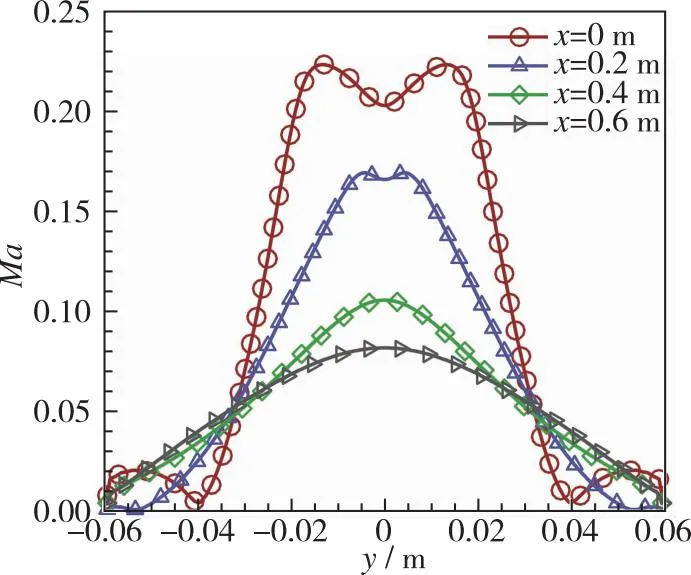
图9 稳定段不同位置处Mach数沿轴线法向分布Fig. 9 Mach number distribution along the normal direction of the axis at different locations in the stable section
为了研究不同扩张角与稳定段组合对风洞启动时间以及稳定段内流场品质的影响, 对扩张角为17°, 6.7°, 4.1°和3.2°的风洞进行非定常数值模拟。随着扩张角减小, 扩张段变长而稳定段相对变短, 图10给出了风洞启动后1 ms和15 ms时不同扩张角和稳定段组合下沿轴向密度梯度云图。在t=1 ms时, 随着扩张角减小, 由于第1喷管与稳定段交接处的拐角增大, 形成的斜激波有明显减弱, 同时稳定段变短会使稳定段内的激波结构更少。在t=15 ms时, 随着扩张角减小, 在第1喉道下游附近的激波串数量逐渐减少, 说明较小扩张角稳定段内的流场演化速度更快, 即压力匹配的第1阶段完成更快。
对不同扩张角与稳定段组合下沿风洞轴线动量以及流线分布云图进行分析(见图11)。t=1 ms时, 第2喉道入口处的流动分离区并没有随扩张角的减小产生明显变化。在t=15 ms时, 对于不同扩张角与稳定段组合, 流动分离区主要分布在稳定段内动量较低的区域, 且随扩张角减小而减小; 而较高动量区域为流动的核心区域, 其分布基本一致。这说明改变扩张角会影响稳定段内分离区大小, 而基本不会对稳定段内核心区域内流动产生较大影响。

(a) t=1 ms

(b) t=15 ms图10 不同扩张角下沿轴线方向上密度梯度分布云图Fig. 10 Density gradient cloud chart along the axis direction at different expansion angles

(a) t=1 ms
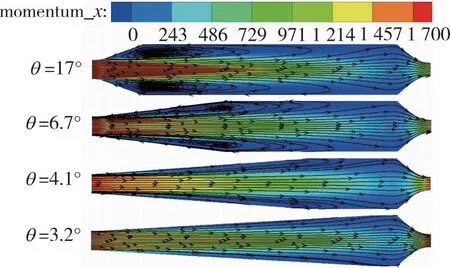
(b) t=15 ms图11 不同扩张角下沿轴线方向上动量分布云图Fig. 11 Momentum cloud chart along the axis direction at different expansion angles
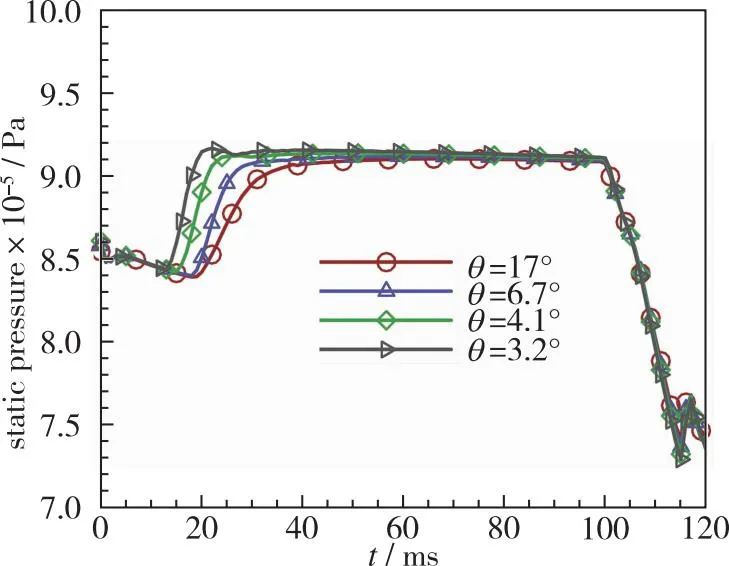
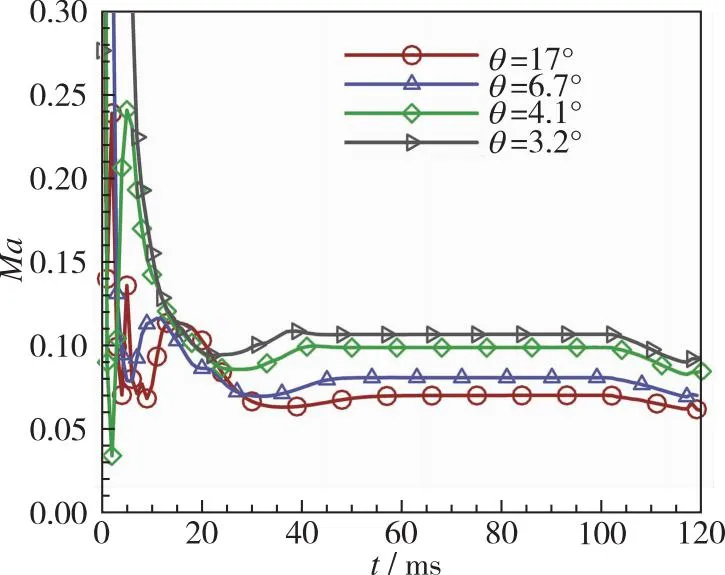
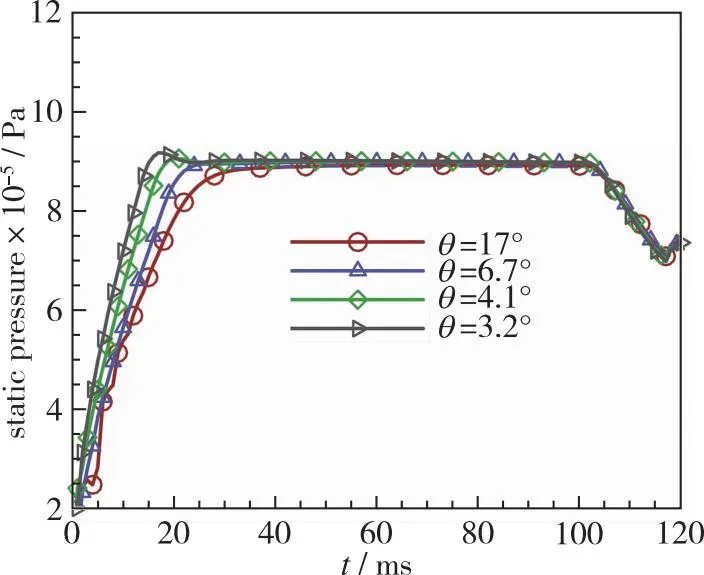
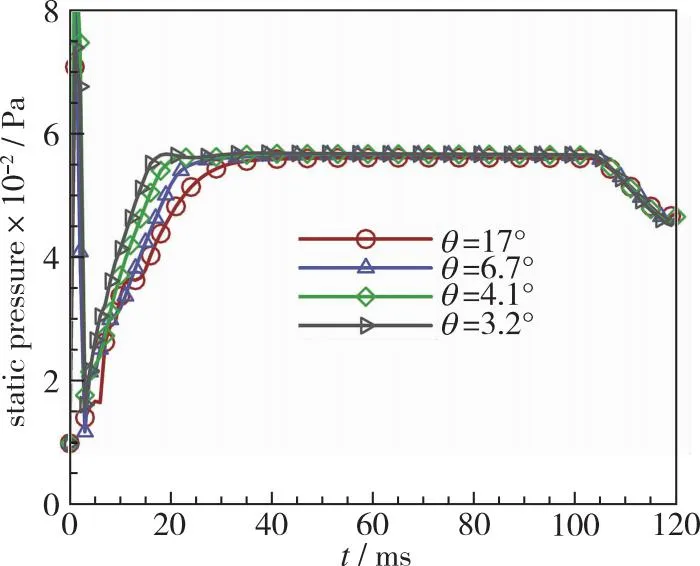
为了分析不同扩张角与稳定段组合对风洞启动时间的影响, 取不同扩张角下位置1, 3, 4处的Mach数和压力分布随时间变化曲线如图12~14所示。从图12(a)、 (b)可以看出, 储气段入口处Mach数在10~20 ms之间的峰值随扩张角减小而降低, 达到稳定的时刻逐渐提前。储气段入口处的压力变化反映了稳定段内质量流量匹配的第1阶段与第2阶段所需时间随扩张角减小均缩短, 说明较小扩张角与稳定段组合加速了风洞的启动过程。稳定段出口处的Mach数和压力(如图13(a)、 (b)所示)达到稳定的时间随扩张角减小逐渐提前。风洞运行时, Mach数会随着扩张角减小而有略微增大但压力基本保持不变, 可能是由于稳定段越短匀流效果越差, 同时受第1喉道射流效应的影响越大。从图14(a)、 (b)两图可以得出结论, 不同扩张角与稳定段组合几乎不会对风洞稳定运行时试验段内Mach数和压力产生影响, 较小扩张角组合可以明显提高风洞的有效运行时间。由于风洞的有效运行时间应以试验段内静压幅值波动小于1%作为判断标准, 依照此判断标准, 扩张角为17°, 6.7°, 4.1°和3.2°对应的启动时刻为34, 29, 22, 18 ms, 对应的结束时刻均为104 ms, 因此相应的风洞有效运行时间分别为70, 75, 82, 86 ms。通过采用减小扩张角并保持扩张段与稳定段总长不变的方式, 风洞有效运行时间增加将近16 ms, 相较之前提升了约20%, 大大提高了风洞的试验能力, 这对于高超声速风洞设施来说十分关键。

(a) Mach number
(b) Static pressure图12 位置1处不同扩张角下Mach数和压力随时间的变化Fig. 12 Variation of Mach number and pressure with time at different expansion angles at slot 1 position
(a) Mach number
(b) Static pressure

(a) Mach number
(b) Static pressure
2.3 不同扩张角组合对风洞静态流场品质影响
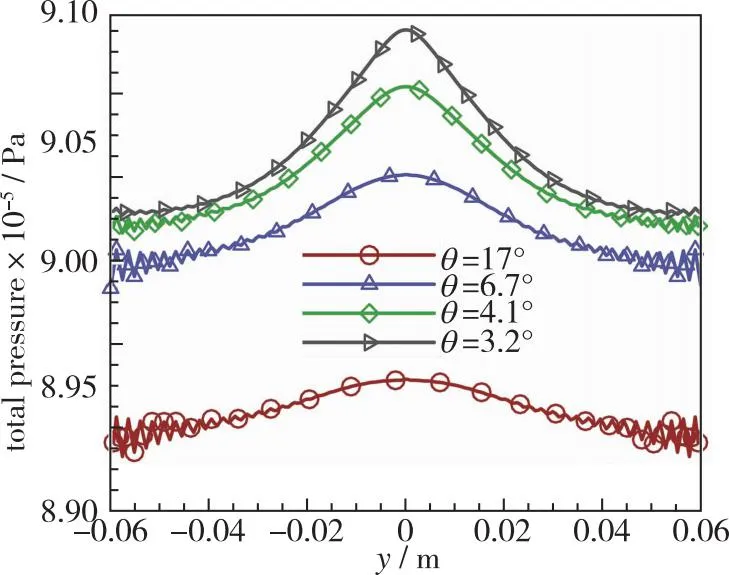
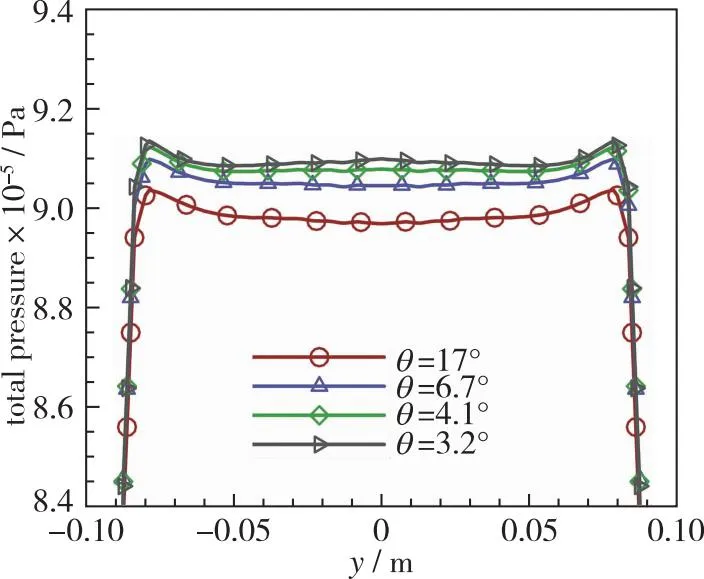
为了分析不同扩张角与稳定段组合对稳定段和试验段内静态流场品质的影响, 取不同扩张角组合下风洞运行时(t=60 ms)位置3, 4处的Mach数和总压沿风洞轴线法向分布进行分析(见图15, 16)。

(a) Mach number
(b) Total pressure

(a) Mach number
(b) Total pressure
从图15可以发现, 扩张角越小, 稳定段出口Mach数和总压沿风洞法向的分布变化越大, 说明稳定段内的流场越不均匀。而总压随扩张角减小而增大, 表明较小的扩张角组合能够减小总压损失。较小扩张角组合导致的稳定段流场不均匀可以通过在稳定段内安置多孔金属板等阻尼材料促进气流分布均匀, 进而改善稳定段的流场品质。
从图16反映的情况来看, 不同扩张角组合几乎不会对试验段内的Mach数法向分布产生影响。随着扩张角减小, 风洞试验段内的总压逐渐增大, 同时变得更加均匀。通过采用较小扩张角组合能够减少近10%的总压损失, 可以有效提高风洞的Reynolds数模拟能力。因此, 当采用较小扩张角结合较短稳定段的组合, 可以有效提高双喉道Ludwieg管风洞的有效运行时间, 并且能够获得更少的总压损失, 同时基本不会对稳定段和试验段内的静态流场品质产生较大影响。
2.4 双喉道与常规Ludwieg风洞动态流场品质比较
之前的研究, Li等[16]通过使用装有PCB压力传感器的Pitot探头测量了不同Reynolds数下θ为17°工况下的双喉道与常规Ludwieg管风洞试验段内的来流总压脉动幅值, 并将传感器测量得到的风洞有效运行时间与数值模拟结果进行对比, 结果显示数值模拟结果与试验吻合良好, 能够反映风洞的真实有效运行时间。同时传感器测量到的压力脉动幅值能够反映不同风洞之间的动态流场品质, 结果如图17, 18所示。

图17 不同Reynolds数下Pitot探头测量的压力脉动功率谱密度对比[16]Fig. 17 Comparison of power spectrum density of Pitot pressure at different Reynolds numbers[16]
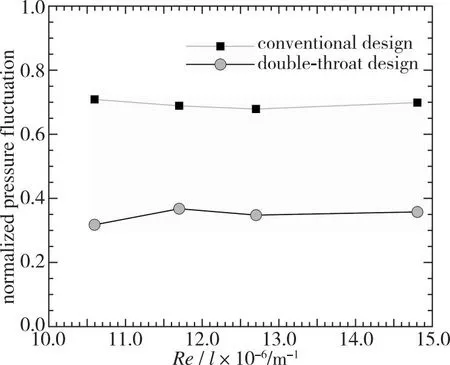
图18 不同Reynolds数下归一化压力脉动幅值对比[16]Fig. 18 Comparsion of normalized pressure fluctuation at different Reynolds numbers[16]
从先前的试验结果来看, Pitot探头测量得到的不同Reynolds数下双喉道Ludwieg管风洞试验段内压力脉动的功率谱密度以及归一化的压力脉动幅值均明显低于常规Ludwieg管风洞, 说明双喉道Ludwieg管风洞试验段内的扰动水平较低, 动态流场品质更好。但由于基于URANS的数值模拟不能反映不同扩张角与稳定段组合下的风洞试验段内的动态流场品质, 因此后续还将开展相应的测量试验, 以评估其对风洞试验段内动态流场品质的影响。
3 结论
为了深入了解第1喉道面积大于第2喉道的双喉道气动布局Ludwieg管风洞的启动特性, 通过数值模拟方式进行了研究。相较于常规Ludwieg管风洞气动布局, 该气动布局可以大幅提高风洞的流场品质, 但会延长风洞启动时间。针对该问题, 本文研究了不同扩张角与稳定段组合对风洞启动过程和静态流场品质的影响, 初步得出以下结论:
1) 风洞启动过程, 稳定段内的质量流量匹配过程以第1喉道不存在声速流动为节点可以分为两个阶段: 第1阶段稳定段内的流场结构复杂, 流动较为混乱, 是流场结构趋于稳定的过程; 第2阶段稳定段内流动为亚声速流动, 无激波结构存在, 是储气段与稳定段内压力的匹配过程。该气动布局风洞在稳定运行时, 第1喷管和稳定段内的流动均为亚声速流动, 能够有效减小稳定段上游部件对试验段流场品质的影响。
2) 采用较小扩张角与稳定段的组合能够增加大约20%的风洞有效运行时间, 同时减少近10%的总压损失, 可以有效提高风洞的试验能力。
3) 不同扩张角与稳定段的组合基本不会对试验段内的静态流场品质产生影响; 但较小扩张角组合下稳定段内的流场会更不均匀, 可以通过设置整流措施改善稳定段内流场品质。
猜你喜欢
计测技术(2022年1期)2022-04-18
西北工业大学学报(2021年3期)2021-07-12
航空发动机(2020年3期)2020-07-24
航空工程进展(2020年2期)2020-05-06
实验流体力学(2019年6期)2020-01-10
工程与建设(2019年4期)2019-10-10
中国核电(2017年2期)2017-08-11
水利科技与经济(2016年8期)2016-04-22
新疆石油地质(2015年6期)2015-09-22
实验流体力学(2015年2期)2015-06-23
