基于ITS模型的短波宽带移动信道建模与仿真
2024-02-20 01:24李国军王彦淞叶昌荣艾昊
科学技术与工程 2024年2期
李国军, 王彦淞, 叶昌荣,3*, 艾昊
(1.重庆邮电大学光电工程学院/重庆国际半导体学院, 重庆 400065; 2.超视距可信信息传输研究所, 重庆 400065; 3.重庆邮电大学光电信息感测与传输技术重庆市重点实验室博士后科研工作站, 重庆 400065)
短波(3~30 MHz)通信利用大气电离层对高频电磁波的反射机理可实现数百至数千公里的超视距传输[1],在航空、航海、外事等领域的远程通信中广泛应用。随着船只、飞机、临近空间飞行器等机动平台活动范围与机动能力的快速发展,传统窄带短波通信体制难以适应机动平台强多普勒效应下高可靠传输需求。宽带短波通信已成为机动平台短波移动通信的重要研究方向。
现有短波宽带信道模型主要针对点对点静态通信场景,难以有效描述机动平台移动通信信道特性,特别是针对超音速高机动飞行载具,高速移动的飞行器与高频载波会导致传输信号产生较严重的多普勒效应,使得信道衰落特性更加难以描述[2-3]。为此,研究机动平台短波宽带移动通信信道模型,为机动平台短波移动通信系统设计与性能评估提供基础理论模型,成为短波移动通信领域亟待解决的关键问题之一。
无线信道的建模方法主要有3种:统计性建模、确定性建模和半确定性建模。由于电离层具有时变性,难以利用确定性建模的方法来表征短波信道,通常基于历史信道探测数据来建立短波统计性信道模型。窄带Watterson模型[4-5]和宽带ITS模型[6-7]是目前比较典型的两种基于实测数据得到的短波统计性信道模型。文献[8]运用Nakagami-m函数对ITS模型中的功率延迟剖面函数进行拟合,降低了模型复杂度,但该模型仍只适用于收发两端不存在相对运动的静态场景。对于移动信道的研究,文献[9-11]研究了超短波频段中航空移动信道的衰落特征,对该信道进行了统计性建模并实现仿真。但超短波难以实现超视距通信,在极地、远海飞行中,短波对实现地空超视距通信起到了至关重要的作用;文献[12]在短波频段实现了单一移动方式下的移动通信信道建模,但在实际移动通信中,高机动飞行器的移动方式复杂多变,故该模型难以全面反映机动平台下短波移动信道的衰落特性;文献[13]根据飞行器种类、机动状态进行分类,对短波移动通信信道进行建模并实现差异化仿真,但该信道模型是基于Watterson窄带模型做出的改善,该模型难以满足高速传输数据的要求。
为此,在借鉴短波宽带ITS信道模型的基础上,现引入机动平台复杂相对运动情况下信道多普勒传播效应,提出一种面向机动平台的短波宽带移动信道模型,该模型融合不同场景、不同传播模式,能够在预知飞行器轨迹时,基于飞行器轨迹分析信道衰落特性,实现信号复现与信道模拟。当轨迹未知时,也能根据飞行器种类、机动频率等先验信息,实现具有各态历经性的机动平台短波宽带信道仿真,对移动通信系统测试和评估起到重要作用。
1 短波ITS信道模型
ITS信道模型是基于大量实测数据建立的一种短波宽带统计性信道模型。该模型同时适用于描述宽、窄带信道,是目前公认的最能全面反映短波信道特性的模型,其仿真表达式为
y(t)=x(t)h(t,τ)+n(t)
(1)
式(1)中:x(t)为输入信号;y(t)为输出信号;t为时间变量;τ为时延变量;h(t,τ)为信道冲激响应;n(t)为噪声。
ITS信道模型以信道冲激响应的形式实现,本文研究主要针对信道冲激响应h(t,τ)进行建模。单传播模式下模型框图如图1所示。
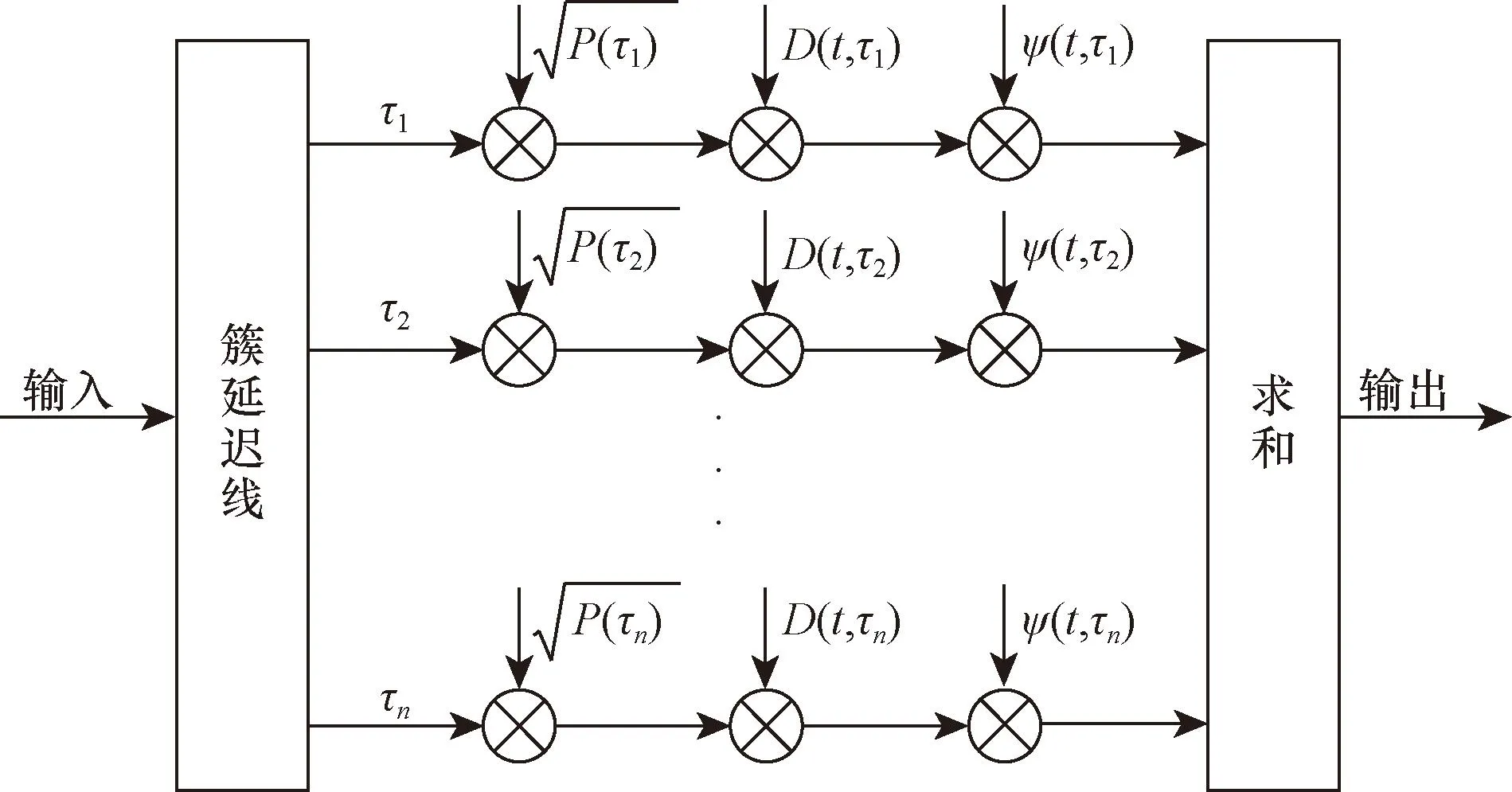
图1 ITS信道模型Fig.1 ITS channel model
单位冲击响应是时间变量t和时延变量τ的函数,即
(2)
式(2)中:hpn(t,τ)为第p个传播模式的信道冲激响应;n为单一传播模式下的传播路径数。每一个传播模式下的信道冲激响应hpn(t,τ)由此模式下的时延功率分布Pn(τ)、确定相位函数Dn(t,τ)以及随机调制函数ψn(t,τ)共同表示。
1.1 功率延迟剖面函数
功率延迟剖面(power delay profile, PDP)函数的建立是ITS信道模型仿真实现的一个难点,需要根据实测数据获得部分参数,再进行大量迭代计算才能确定一个PDP函数。为了降低模型复杂度,本文研究采用文献[8]提出的Nakagami-m分布的概率密度函数拟合PDP函数的方法来对Pn(τ)进行拟合。
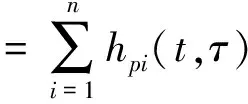
图2所示为m=1时的Nakagami-m分布概率密度函数图,其概率密度函数表达式为
Af为接收信号阈值,其对应的最大和最小时延分别为τU和τL;στ为延迟间隔,στ=τU-τL;τC为中心频率处的平均延时,决定了延时偏移
(3)
(4)
式中:Γ(·)为Gamma函数;τ为时延变量;m为衰落因子,m越大则衰落越小;σ为形状因子,决定函数扩展形状,σ越大则函数展宽越明显。
归一化后的Nakagami形式PDP函数的表达式[8]为
(5)
使用Nakagami-m函数拟合方法时只需要确定m和σ的值就可以得到具体的PDP函数,m的值通过仿真测试得到,σ的值可根据经验值取得。
1.2 确定相位函数
Dn(t,τ)为确定相位函数,可表示为
Dn(t,τ)=exp{j2π[fs+b(τ-τC)]t}
(6)
(7)
式中:fs为受电离层不规则运动的影响引起的多普勒频移;fs、fsL分别为时延τ=τC、τ=τL时的多普勒频移;b为多普勒频移随延时τ的变化率。
1.3 随机调制函数
大量实测数据表明,短波信道的频谱扩展谱型分为高斯型(中、低纬度地区)和洛伦兹型(高纬度地区)[6],利用随机调制函数ψn(t,τ)来模拟多普勒功率谱的扩展:使用两组随机时间序列构成一组复序列,这个复序列即随机调制函数ψn(t,τ),再将其与各条路径的PDP函数相乘,使信道相位响应产生随机起伏,这种起伏导致了信号的频谱拖尾效应,以此实现多普勒扩展。为确保各路径间无相关性,要求随机序列ψn(t,τ)在时延τ上独立。
2 机动场景下的信道建模
相较于静态场景下的通信信道而言,移动信道的区别最主要在于多普勒频移参数具有时变性,体现在ITS信道模型上即Dn(t,τ)函数中的多普勒频移fs为时变值,因此本节主要分析了不同移动场景下的多普勒频移参数取值情况,对Dn(t,τ)函数进行补充,使ITS信道模型适用于描述移动场景下的信道特征[14]。
在高速移动场景下,短波信道中的多普勒频移不单受电离层不规则运动的影响,还要受收、发端相对运动带来的影响,前者引起的多普勒频移为fs,后者引起的多普勒频移记为fm,因此信道第n条路径的多普勒频移fn由两部分构成,即
fn=fs+fm
(8)
其中,fm的表达式为
(9)
式(9)中:fc为信号的载波频率;c为光速;v为飞行器的运动速率;θn为第n条路径中接收端的入射波与其运动方向的夹角。
2.1 预知航迹情况下的信道建模
由于高机动场景下的飞行器轨迹最为复杂多变,本文研究以高机动场景为例,对其在多种典型运动状态下的多普勒频移进行建模,该模型也适用于中、低机动频率场景。在预知航迹的情况下,可以将飞行器航迹明确划分为几个典型机动状态下的轨迹及它们的组合轨迹[15]。根据飞行器空中机动方式,可将其机动行为模式划分为5个典型机动状态,其中,P点位置表示短波在电离层反射的位置;θ(ti)代表t=ti时刻飞行器速度方向与电波传播方向的夹角;a(ti)代表t=ti时刻飞行器的加速度及其方向;β(ti)代表t=ti时刻飞行器的速度方向与加速度方向的夹角。各状态下的θ(ti)均根据实际飞行轨迹来决定,以下分析以图3~图5所示轨迹为依据。
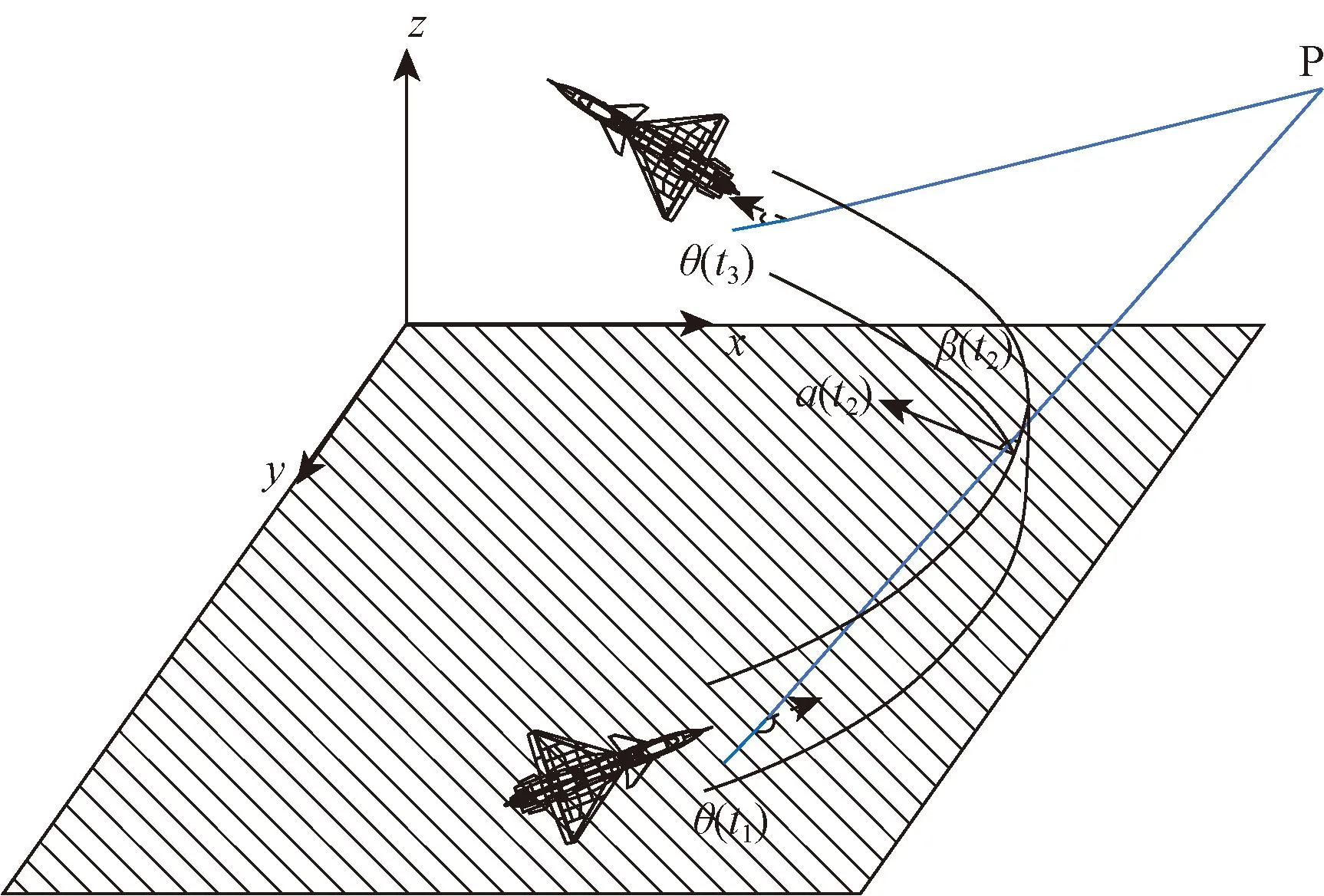
图3 急转示意图Fig.3 Schematic diagram of sharp turns
2.1.1 急转状态
急转是所有空中机动中最基本的机动动作,可视为曲线运动,如图3所示,其速度与加速度方向及大小为时变值。假设飞行器初速度为v0,加速度为a,忽略二阶加速度得其速度表达式为
v(t)=v0+a(t)tcosα(t)
(10)
式(10)中:t为时间变量;α(t)为速度与加速度方向的夹角,当α(t)=0°或α(t)=180°时,飞行器做直线上的加、减速运动。在此过程中,速度方向与电波传播方向的夹角θ在[0,π]持续变化,因此运动引起的多普勒频移会发生由负到正的变化。
2.1.2 跃升或俯冲状态
飞行器的跃升或俯冲动作均可分解为水平方向上和垂直方向上的和速度。速度分量vx、vy可表示为
vx、y(t)=v0+a(t)t
(11)
vy(t)与式(11)表达式相同,其与速度v的表达式为

(12)
此机动状态下,飞行器速度方向与电波传播方向的夹角θ变化较小,在某范围内服从均匀分布。
2.1.3 筋斗状态
飞行器的筋斗动作可视为前进方向上的圆周运动,如图4所示,其速度表达式为
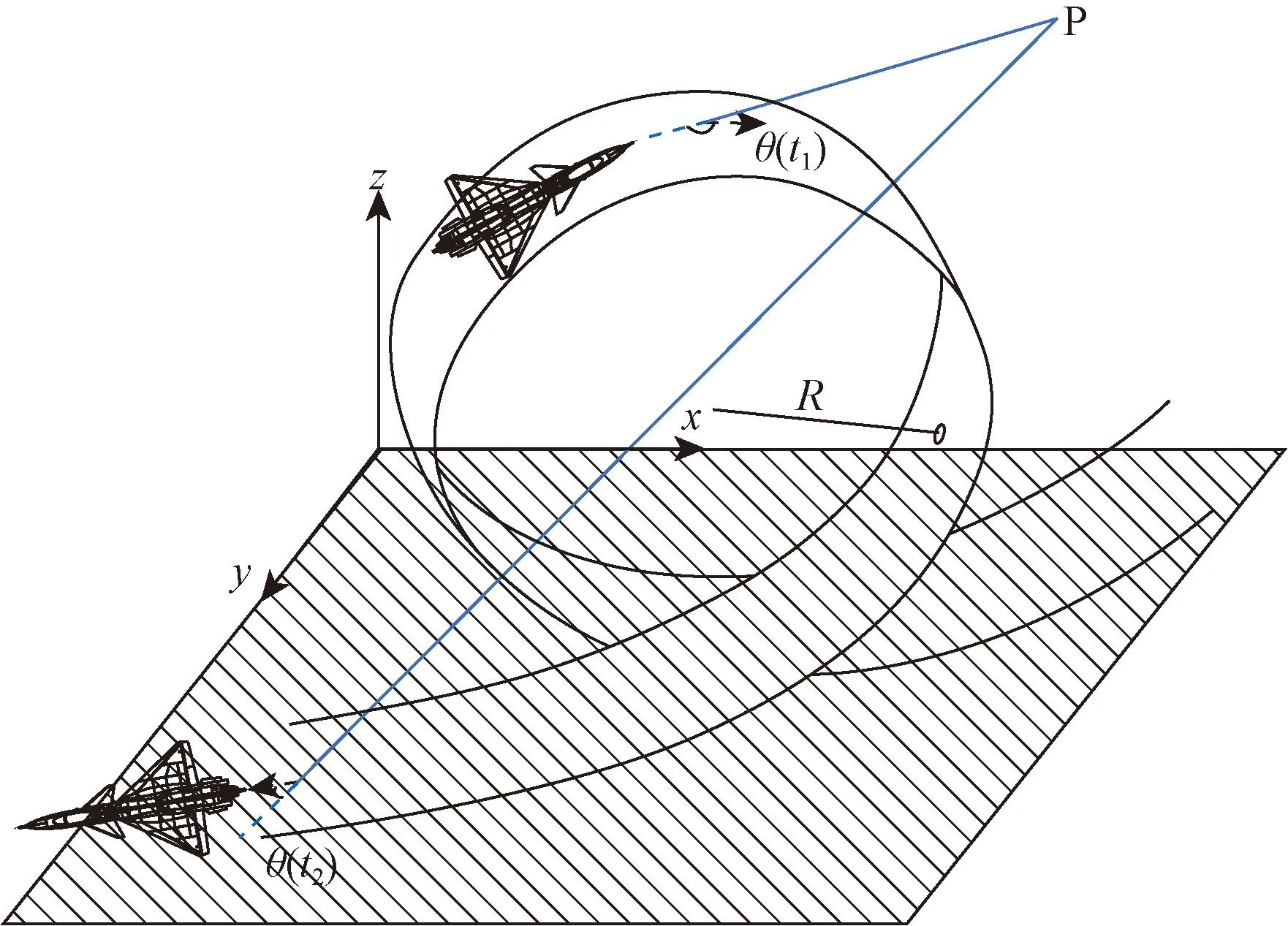
图4 筋斗示意图Fig.4 Schematic diagram of somersault
v(t)=[Ω0+μ(t)t]R
(13)
式(13)中:Ω0为角初速度;μ(t)为角加速度;R为圆周半径。
当μ(t)=0时,其做垂直平面上的匀速圆周运动。由于其动作持续期间运动方向与电波传播方向的夹角在[0,2π]持续变化,因此产生的时变多普勒频移值会在某范围内正负变化。
2.1.4 盘旋升、降状态
当飞行器对某区域执行监控时,其运动方式可分解为水平面内的圆周运动与垂直方向上的直线运动,如图5所示。
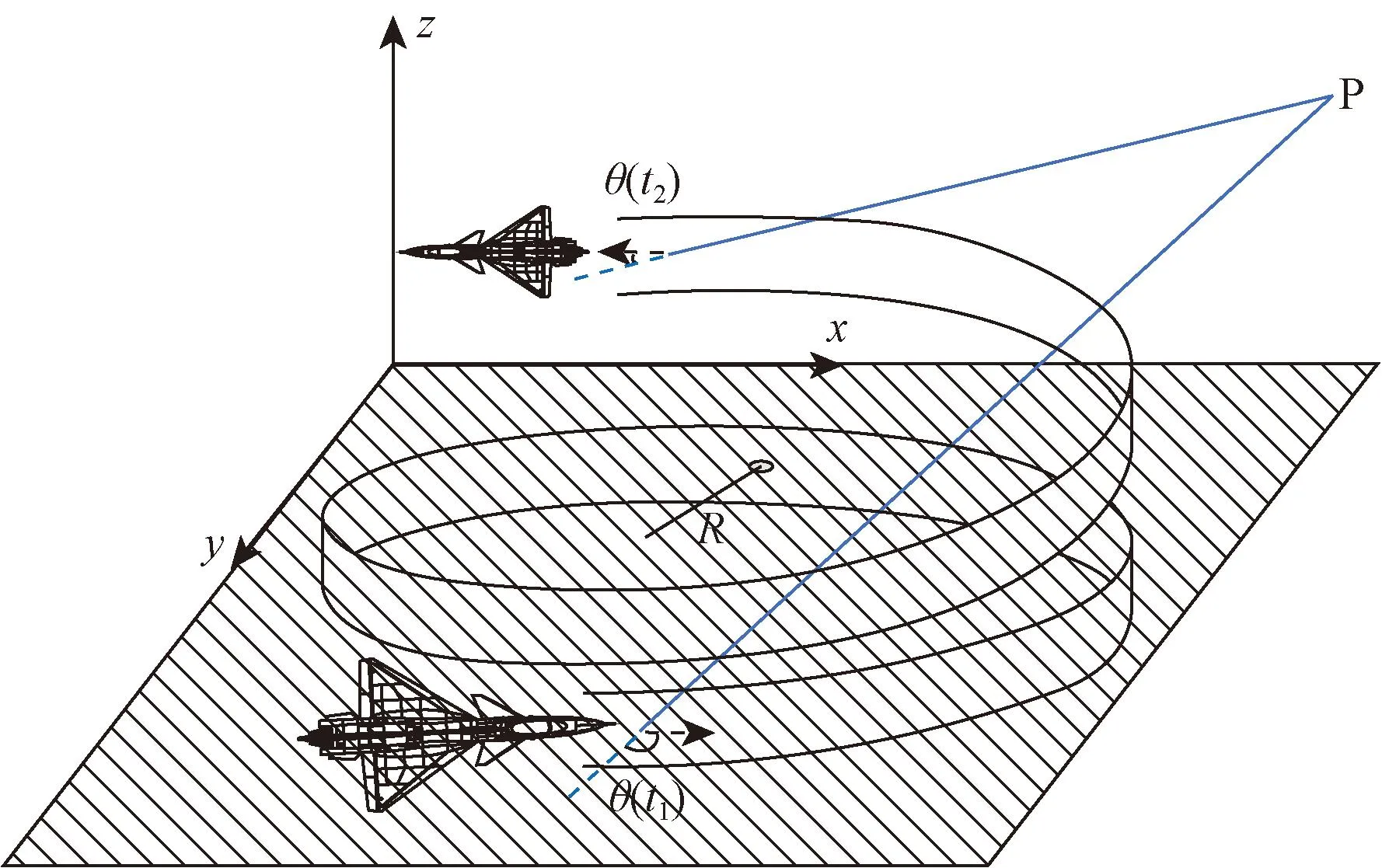
图5 盘旋示意图Fig.5 Schematic diagram of spiral
其速度表达式为
vxoy(t)=[Ω0+μ(t)t]R
(14)
vz(t)=v0+a(t)tcosα(t)
(15)

(16)
其运动方向与电波传播方向的夹角θ在某范围内服从均匀分布。
2.1.5 桶滚状态
桶滚机动是高空近距离格斗中十分实用的战术动作,其机动轨迹可视为螺旋前进,因此速度表达式可分解为
vx(t)=v0+a(t)t
(17)
vyoz(t)=[Ω0+μ(t)t]R
(18)

(19)
由于桶滚动作的圆周半径较小,其运动方向与电波传播方向的夹角θ的变化范围很小。
将各机动状态下的速度表达式代入式(9)得到时变多普勒频移值。
通常可以将飞行轨迹分解为以上5种典型机动状态,如图6所示。因此,在提前预知飞行器的飞行航线轨迹情况下,可以更准确地获知每一时刻由运动引起的多普勒频移参数的变化情况,接收端据此进行信号的传播反演。
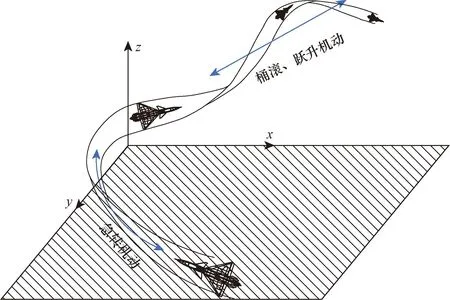
图6 飞行轨迹示意图Fig.6 Flight trajectory diagram
2.2 未知航迹情况下的信道建模
在未知飞行器飞行轨迹情况下,无法直接获取飞行器的速度大小、方向等参数,故不能通过式(9)确定其多普勒频移。但可以根据飞行器的机动频率来构建其可能的运动方式[16],从而确定多普勒频移参数,模拟其可能受到的多普勒效应影响,对通信系统效能评估起到重要作用。
根据飞行器种类将机动频率划分为低、中、高3个等级,并给出了相应等级下的机动频率参考值、飞行状态持续时间范围[13],如表1所示。
考虑到飞行器受发动机功率限制,存在飞行速度与加速度上限,即不可能一直处于加速状态。且随着速度的增大,飞行器加速度应逐渐减小。由于飞行器速度存在正负值,可将Logistics函数表达式为
(20)
式(20)中:P0为初始值;K为终值;r衡量曲线变化快慢。
由于r越大,飞行器的速度变化越快,信道的衰落也越严重,即时延功率分布函数中m参数的值越小。因此,r的取值也会影响m参数的大小。令最大速度为vmax,此时P0=vmax,K=2vmax。则速度可表示为
(21)
式(21)中取r=0.5,得到飞行器速度变化曲线,如图7所示。

图7 飞行器速度变化曲线Fig.7 Aircraft speed variation curve
随着飞行速度的增加,加速度会逐渐降低,直至飞行器保持最大飞行速度匀速飞行。在移动场景下,由于飞行器运动方向与入射波方向夹角、运动速度大小快速变化,导致信道多普勒效应在短时间内快速变化。通常情况下,飞行速度公式可表示为
v(t)=v0+a(t)cosα(t)t
(22)
式(22)中:v0为飞行器的初始速度;a(t)为飞行器的加速度,当a(t)=0时表示进行定速运动;α(t)为水平面内速度与加速度方向的夹角,在α(t)=0的情况下,飞行器进行直线运动,其余情况下做曲线运动,曲线运动又可分解为多级圆周运动。因此,v(t)能够全面描述水平面上的所有运动状态。
在得到合理的飞行器飞行速度后代入式(9)计算出时变多普勒频移值。
在未知轨迹的情况下,通常可以根据飞行器种类、机动频率等先验信息,构建出飞行器可能的飞行轨迹。由于复杂的飞行轨迹投影至水平面后,可将其分成很多小段,如图8所示,因此可以将飞行轨迹分解成多段直线运动和圆周运动的组合。再根据所构建出的飞行轨迹得到时变多普勒频移,以此来模拟移动通信过程中由收、发端相对运动引起的多普勒效应影响。
图8 航迹分解示意图Fig.8 Schematic diagram of trajectory decomposition
2.3 信道冲激响应表达式
短波移动信道的多普勒效应除了要考虑电离层波动引起的多普勒频移,还需要考虑由飞行器机动状态引起的时变多普勒频移。各传播路径的时变多普勒频移可表示为
(23)
此时,ITS信道模型中的确定相位函数Dn(t,τ)为

(24)
单传播模式下短波宽带移动信道模型的信道冲击响应表达式为
(25)
3 信道模型仿真与分析
短波宽带移动信道的冲激响应被划分为p个传播模式,对应于p条传播路径,每条传播路径由n个子路径组成,各子路径进行独立的相位调制和随机幅度调制,最后相加合成单路径的最终信号,单传播模式下的模型仿真实现框图如图9所示。
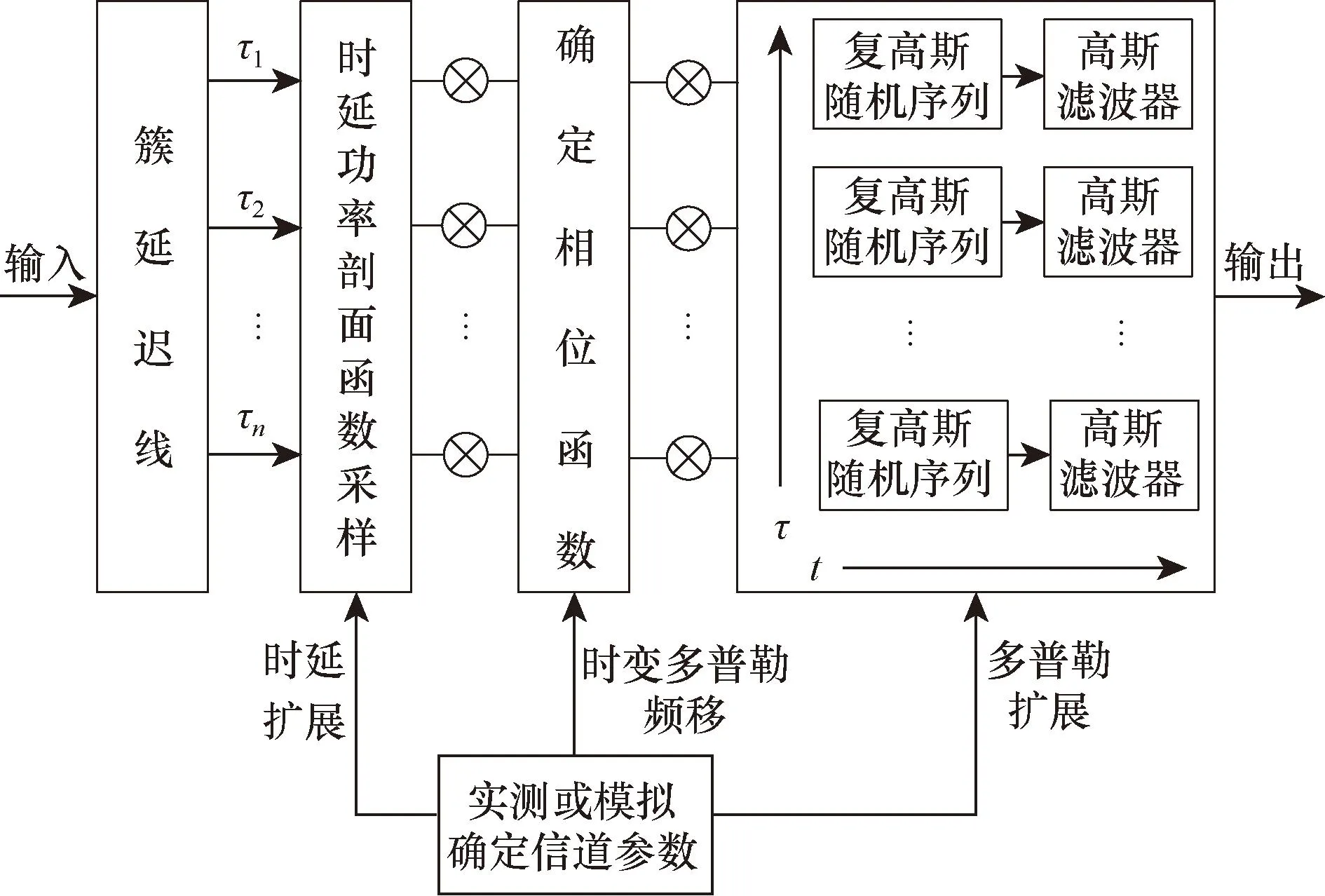
图9 短波宽带移动信道模型仿真框图Fig.9 Simulation block diagram of shortwave broadband mobile channel model
3.1 时延扩展仿真
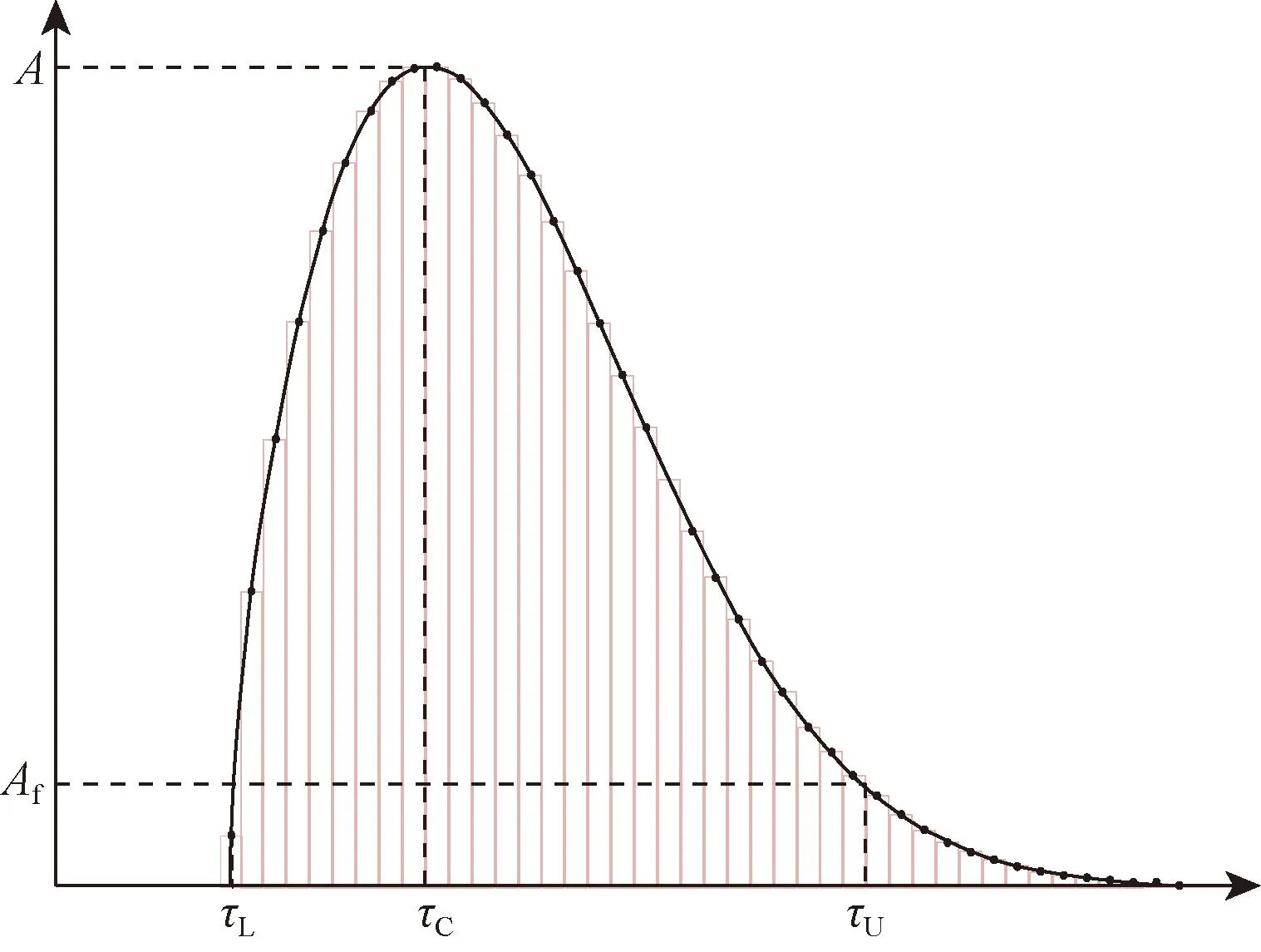
图10 时延功率分布函数的采样过程图Fig.10 Sampling process diagram of delay power distribution function
3.2 时变多普勒频移仿真
短波宽带移动信道的时变多普勒频移实现框图如图11所示。在预知航迹情况下,需要根据飞行器的轨迹来计算每一时刻的多普勒频移值,再叠加上由电离层波动引起的多普勒频移值;在未知航迹情况下,需要根据飞行器机动频率、最大速度、最大加速度等信息首先构建出可能的飞行轨迹,再计算出每一时刻的多普勒频移值,最后叠加上由电离层波动引起的多普勒频移值。多普勒频移的仿真实现就是将原信号乘以一个频移因子ej2πft,因为要让一个信号实现频移Δf,等效于在时域上乘以ej2πΔft,由此信号频率便发生了Δf的频偏。由于该多普勒频移值是时变的,因此不同时刻的偏移值不同。
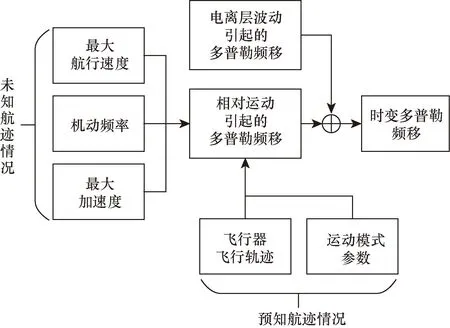
图11 时变多普勒频移的实现框图Fig.11 Implementation block diagram of time-varying Doppler frequency shift
3.3 多普勒扩展仿真
ITS模型有洛伦兹型和高斯型两种多普勒扩展谱型,其中洛伦兹型扩展谱符合高纬度地区信道,高斯型扩展谱符合中、低纬度地区信道。考虑到中国地处中、低纬度地区,因此仿真中的多普勒扩展采用高斯型谱[18]。首先生成一组复高斯白噪声序列,其功率谱服从均匀分布,通过多级内插使其长度与信号一致。然后对其进行高斯滤波,使其功率谱也服从高斯分布。最后用输入信号乘以此高斯白噪声,二者在时域上做乘积,等效于在频域上做卷积,则输入信号的频谱也会变为高斯型谱,由此实现频谱扩展[13]。
3.4 信道散射函数
散射函数(scattering function, SCF)是关于时延τ和频移fD的函数。对于宽带短波信道而言,时延扩展、多普勒频率扩展和多普勒频率偏移是最为重要的信道特性[17]。根据多普勒频谱形状可将信道散射函数分为
SG(τ,fD)=P(τ)e-π[(fD-fn)σf]2ej2πφ0
(26)

(27)
式中:σf为多普勒扩展半带宽σD的函数;φ0为任意常数相位。通常用|S(τ,fD)|的三维图像来展示能量在时延轴和频移轴上的散布。
式(26)和式(27)分别是高斯型和洛伦兹型扩展对应的散射函数表达式。
测量信道散射函数的流程如下。
步骤1设发射端发射的上变频之后的信号为
I(t)=x(t)exp(j2πf0t)
(28)
式(28)中:x(t)为本地线性调频(linear frequency modulation, LFM)信号序列。信号经短波信道和下变频后可表示为
O(t)=h(t,τ)x(t)
(29)
步骤2将接收信号O(t)与本地信号x(t)作相关运算,可得
C(t,τ)=[h(t,τ)x(t)]⊗x(t) =h(t,τ)[x(τ)⊗x(τ)]
(30)
式(30)中:⊗表示相关运算。因为LFM信号具有良好的自相关特性(理想情况下为Dirac函数),此时有
C(t,τ)≈h(t,τ)
(31)
因此,可以用相关函数C(t,τ)去估计信道的冲击响应h(t,τ),利用LFM信号对信道进行多次探测。
步骤3对得到的一系列冲击响应h(t,τ),其中ti=1,2,…,n在时间轴t上做自相关运算,即
R(Δt,τ)=E[C*(t,τ)C(t+Δt,τ)]
(32)
步骤4对上述自相关函数作傅里叶变换得到信道的散射函数为

(33)
测试中使用的LFM信号参数为:采样频率48 kHz、单个符号长度约为0.01 s、带宽24 kHz、总符号数为1 000。由此LFM信号探测得到的信道散射函数描述精度为:时延域约0.02 ms、多普勒域约0.048 Hz。
3.5 仿真结果分析
3.5.1 预知航迹情况下
在预知航迹情况下,首先针对5种典型机动状态对短波宽带移动信道进行仿真,设载波频率为15 MHz,最大速度2.2 Ma,最大加速度50 m/s2,速度参数、速度方向与入射波方向的夹角θ取值根据图3~图5所示运动轨迹设置,10 s内的速度与多普勒频移变化如图12所示。
在实际短波信道探测中,不能直接得到信道的冲激响应,因此利用自相关特性较好的LFM序列对所建立信道进行探测。假设现有先验信息:载波频率为15 MHz,输入信号是带宽为24 kHz的LFM信号,2条路径的时延分别为0 ms、2 ms,飞行器处于急转机动状态,初始速度为1.5 Ma,加速度范围在20~40 m/s2变化。据此信息模拟真实情况下的信道衰落情况。
图13(a)所示为LFM信号估算出的信道的冲激响应h(t,τ),从中可以清晰分辨出信道有2条传播路径,路径时延与预设值一致,在不同时刻,各路径的衰落程度并不相同,信道是个典型的时变衰落信道。图13(b)所示为信道冲激响应在时延剖方向上的剖面图,图13(c)所示为信道模型在给定参数情况下的时延剖面函数,前文中已给出理论推导,可以看出由LFM信号估算出的信道冲激响应的时延扩展形状与信道模型预设的时延功率剖面函数一致,两条路径的冲激响应整体幅值出现偏差是因为多普勒效应导致其在时域上的幅值产生变化。
图13 短波宽带移动信道的冲激响应Fig.13 Impulse response of short wave broadband mobile channel
仿真结果验证了所建立信道模型在实现时域色散效应所使用算法的可行性,符合实际信道情况。在机动平台移动信道中,由于多普勒频移参数为时变值,因此信道的散射函数在每一时刻都不同。本文将选取固定时间节点,利用测量信道散射函数的方法,获取某一时刻的信道参数,再将其与理论值做对比,进一步验证该信道模型算法的可行性。假设只存在1条传播路径,飞行器在0~10 s处于盘旋上升机动状态,其盘旋半径R=1 000 m,初始角速度为0.6 rad/s,角加速度为0.01 rad/s2,上升方向初速度为0.3 Ma,加速度为10 m/s2。其在动作持续时间内的速度与多普勒频移变化情况参考图12(b)。仿真中选取t1=1 s、t2=5 s作为时间节点,各节点处的信道参数如表2所示。

表2 各时间节点处的信道参数Table 2 Channel parameters at each time node
图14所示为短波宽带移动信道在同一机动模式下不同时刻的散射函数图,其描述了信道某一时刻的时延扩展和频谱扩展特性。从图14中可以观察到,在不同时间节点处的信道散射函数其时延域和多普勒域的扩展程度均不相同,这是因为在短波宽带移动信道中,由于飞行器在不同时刻的机动行为模式不同,导致信道参数实时变化,因此信道散射函数也在时刻变化。
3.5.2 未知航迹情况下
设飞行器加速度上限为80 m/s2,最大速度2.5 Ma,根据3种机动频率等级随机生成时长60 s的速度变化曲线,仿真结果如图15所示,机动频率等级越高,飞行器的运动状态越复杂。
图15 各机动频率等级下随机生成的飞行器速度Fig.15 Randomly generated aircraft speeds at various maneuvering frequency levels
为便于观察信号所受多普勒效应影响,仿真中设载波频率为15 MHz,基带载波频率为200 Hz的单音信号。假设飞行器属于高机动频率等级,飞行轨迹未知,信道参数设置参考国际电信联盟统计的中纬度地区、存在干扰条件下短波信道(iturHFMD信道)参数指标[19-20],2条路径的延时分别为0 、2 ms,多普勒扩展均为1 Hz,信噪比为10 db,得到10 s内的输出信号如图16所示。
图16 通过信道后的输出信号图Fig.16 Output signal graph after passing through the channel
将时域波形按照时间区间划分,分时段后的信号的频域波形如图17所示。
图17 不同时间段内的信号频谱图Fig.17 Signal spectrum plots at different time periods
为了便于观察不同信道模型对不同运动状态下信号多普勒效应的描述能力,使用标准信道itur-HFMD与本文所提短波宽带移动信道进行对比,飞行轨迹参数如表3所示,5 s时间间隔内的信号频谱对比如图18所示。

表3 飞行器的飞行轨迹参数Table 3 Flight trajectory parameters of aircraft
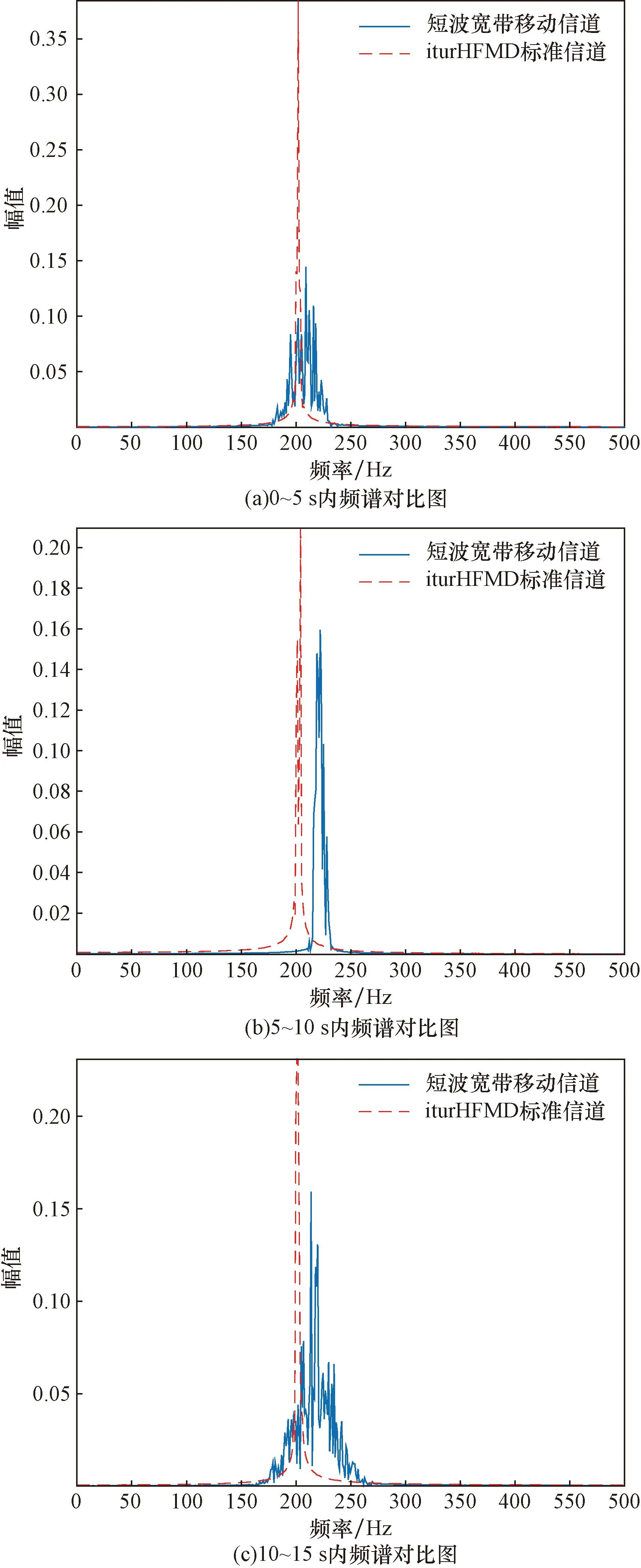
图18 不同运动状态下itur-HFMD模型与短波宽带移动信道模型频谱对比Fig.18 The Itur-HFMD model under different motion states and Spectral Comparison of shortwave broadband mobile channel models
图18所示为相同信道环境下,标准信道模型itur-HFMD与本文所提短波宽带移动信道模型在描述移动场景下信道特性的差异。itur-HFMD信道模型只适用于描述收、发端不存在相对运动时的信道特性,故在15 s内经过该信道的信号频谱频移和扩展基本无变化。而经过短波宽带移动信道的信号频谱发生了较大的偏移,且受加速度影响,不同运动状态下信号频谱扩展情况也有差异。在飞行器进行圆周运动时,由于运动方向的改变,信号产生了正向或负向的频偏,进一步说明本文所提短波宽带移动信道模型能够描述移动场景下的信道特征。
4 结论
针对当前短波ITS宽带信道模型难以适用于机动平台移动通信场景问题,在分析研究飞行器的各种典型机动行为模式与时变多普勒效应的映射关系基础上,提出了面向机动平台的短波宽带移动信道模型,该模型融合了不同场景、不同传播模式的信道特性。最后利用信道探测的方法获取信道冲激响应与散射函数,从时域色散与频域色散的角度对所建立信道模型的有效性进行验证。仿真结果表明,当明确飞行器的飞行轨迹时,根据航迹可以推测每一时刻的信道时频二维双色散效应的变化情况,更准确地获取信道参数,实现对原发送信号的提取;在飞行轨迹未知的情况下,结合飞行器种类、机动频率等先验信息,实现具有各态历经性的机动平台短波宽带信道仿真。同时,针对机动平台下移动信道的多普勒频移建模方法也适用于其他波段,对电离层散射、对流层散射等其他类型的大气空间超视距移动通信信道建模有一定的参考意义。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
电子制作(2018年2期)2018-04-18
人民音乐(2016年1期)2016-11-07
时代风采(2016年12期)2016-07-21
时代风采(2016年10期)2016-07-21
林业与生态(2016年3期)2016-02-27
小朋友·快乐手工(2015年5期)2015-06-06