基于可编程控制器的槟榔包装控制系统设计
2024-02-20 01:22李冬陈明霞贺亚萍林港钧潘杰锋
科学技术与工程 2024年2期
李冬, 陈明霞, 贺亚萍, 林港钧, 潘杰锋
(桂林理工大学机械与控制工程学院, 桂林 541006)
槟榔曾列入抗击新冠肺炎中药配方,具有较高药用价值[1]。目前槟榔包装大多数为手工包装,效率低、卫生问题堪忧。中国包装行业相对起步较晚,虽引进国外技术具备自动化包装能力,但仍存在产品设备精度较低问题[2]。其中包装机封口装置温度控制精度,直接决定产品的质量和包装效率[3-4]。
非线性、时变性以及滞后性是包装机封口装置主要特点,这导致包装效果不理想[5-6]。如何提高包装过程中温度控制精度是提高生产效率的关键,温玉春等[7]提出使用模糊PID 控制算法进行参数自整定,提升控制精度。开发人员主观因素对模糊规则和隶属度函数影响较大,导致存在静态误差,参数调整存在滞后。陈明霞等[8]提出基于径向基函数神经网络(radial basis function,RBF) 的自动包装机温度控制方法。RBF神经网络对参数整定有提升,其非线性映射能力和自学习能力可提高调节精度,对于复杂的控制系统中,其控制分析、计算过程比较复杂,耗时长,实时性差。
为解决以上问题,现将自抗扰控制二自由度等效为传统PID和低通滤波器,推导出参数对应关系,得到关于LADRC控制器的参数方程,并通过粒子群算法对方程的解进行优化,最后将粒子群优化的改进型线性自抗扰控制,应用到包装机封口装置温度控制系统中,实际验证对提高槟榔包装封口质量有重要的意义。
1 包装机封口装置结构
基于PLC的槟榔自动包装机工艺流程如图1所示,在主轴传动装置中主轴上,有形状各异的一系列凸轮,在主轴传动时,各凸轮的动作来带动相应的装置来完成相应的动作;同时,在凸轮转动时,其转动的角度由伺服电机编码器传递给PLC,由PLC根据设定的相角来控制相应的装置完成特定的动作。即由主轴凸轮和PLC共同作用,来保证各个装置动作的协调统一,实现动作。主轴每转动一圈即360°,整机就完成一次完成的取袋,整袋,开袋,开袋吹气检测,充填,封口以及产品排出过程。本文研究以封口装置温度控制为主要研究对象进行论述对象。
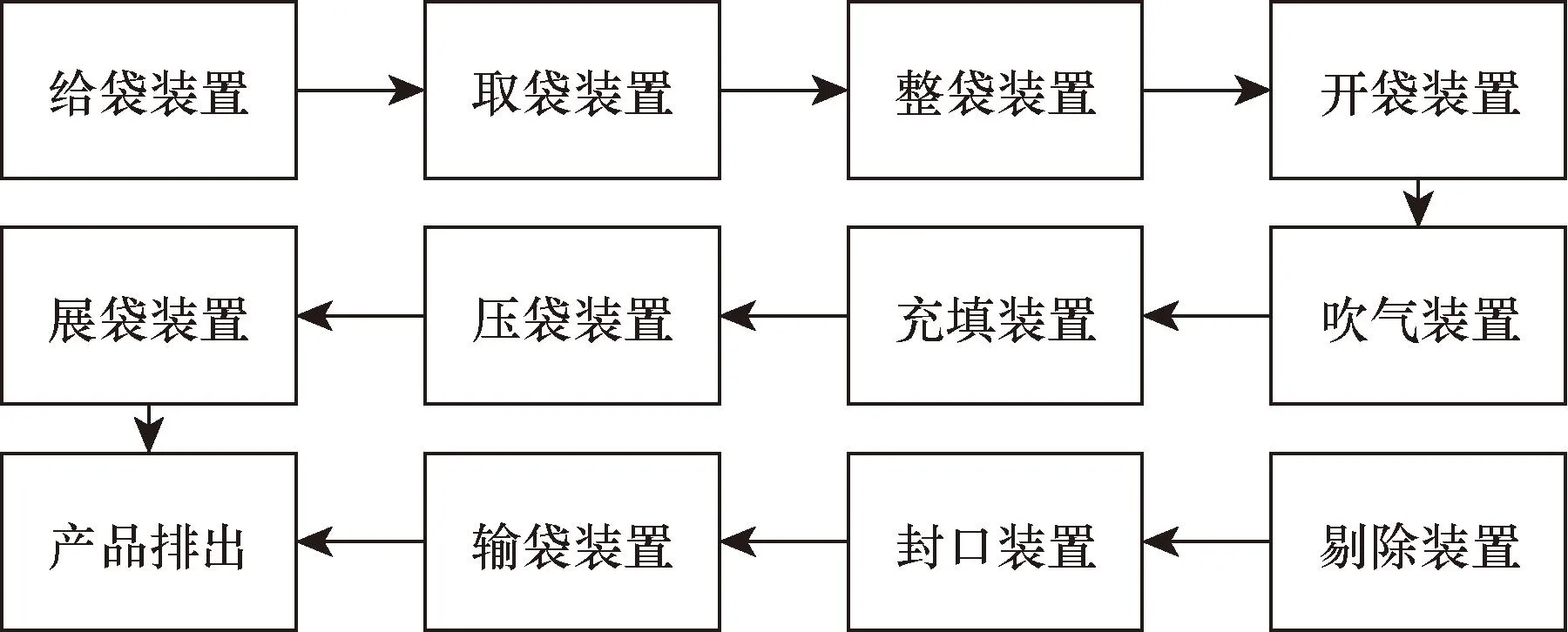
图1 槟榔自动包装机工艺流程Fig.1 Betel nut automatic packaging machine process
槟榔自动包装机封口装置整体结构如图2所示。封口装置采用竖封式,主要由热封部件、整理输送部件、连杆机构等零部件组成。整理输送部件输送单个未封口包装袋到封口装置后,热封部件通过连杆机构闭合对包装袋进行封合,加热完成后加热部件打开,输送部件进入产品输出装置。
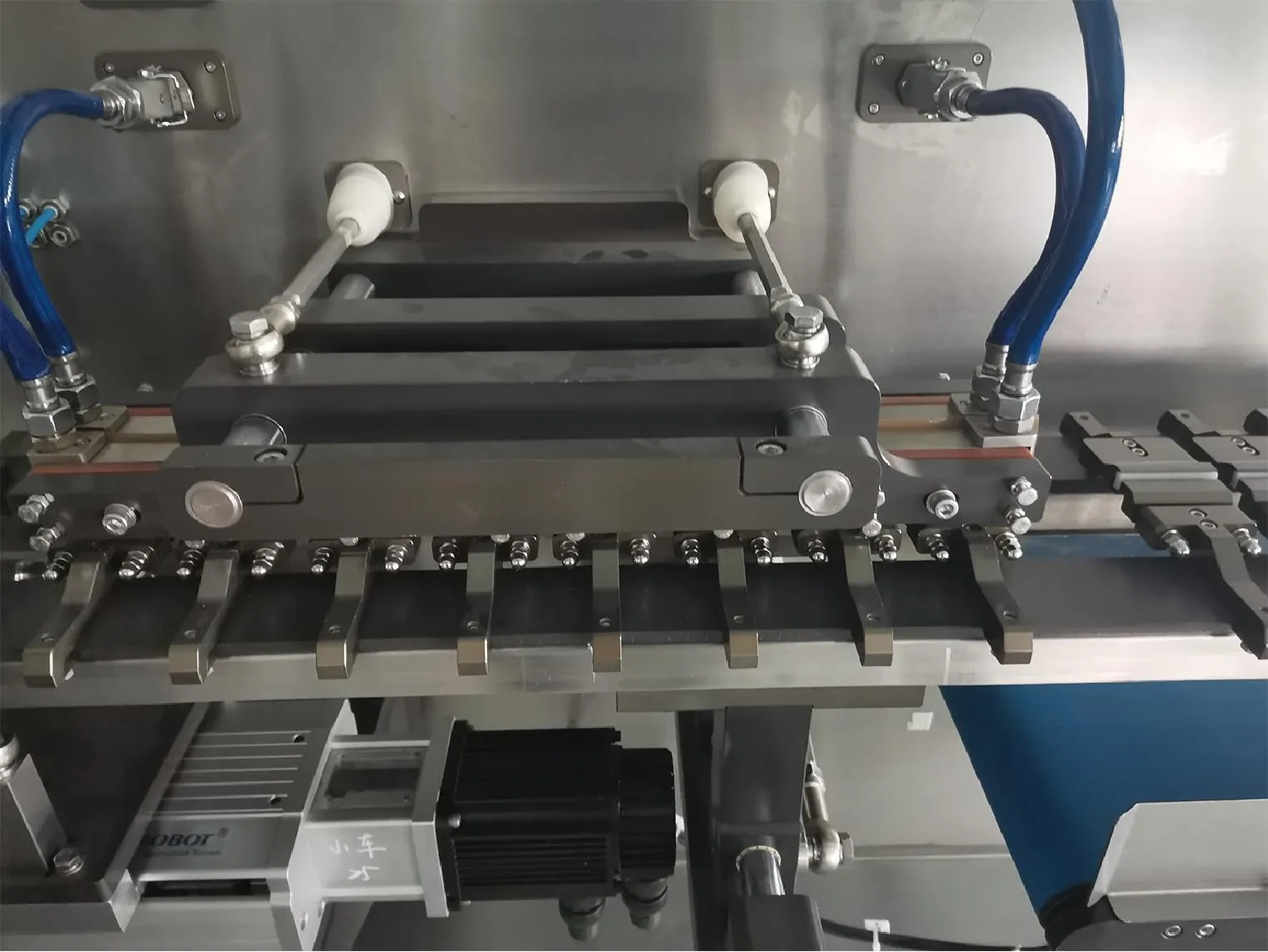
图2 槟榔自动包装机封口装置结构Fig.2 Betel nut automatic packaging machine sealing device structure
2 控制系统设计
2.1 系统结构
槟榔自动包装机封口装置控制架构如图3所示。主要包括PLC控制器、温度控制模块、温度传感器、位置传感器、继电器、伺服电机、连杆机构、人机交互界面等。位置传感器检测到包材到达指定位置,伺服电机启动连杆夹紧包材。通过温度传感器采集到热封的实时温度,温度控制模块中进行实时温度控制,人机交互界面将收到温度信息,提供给用户来观测封口装机温度。
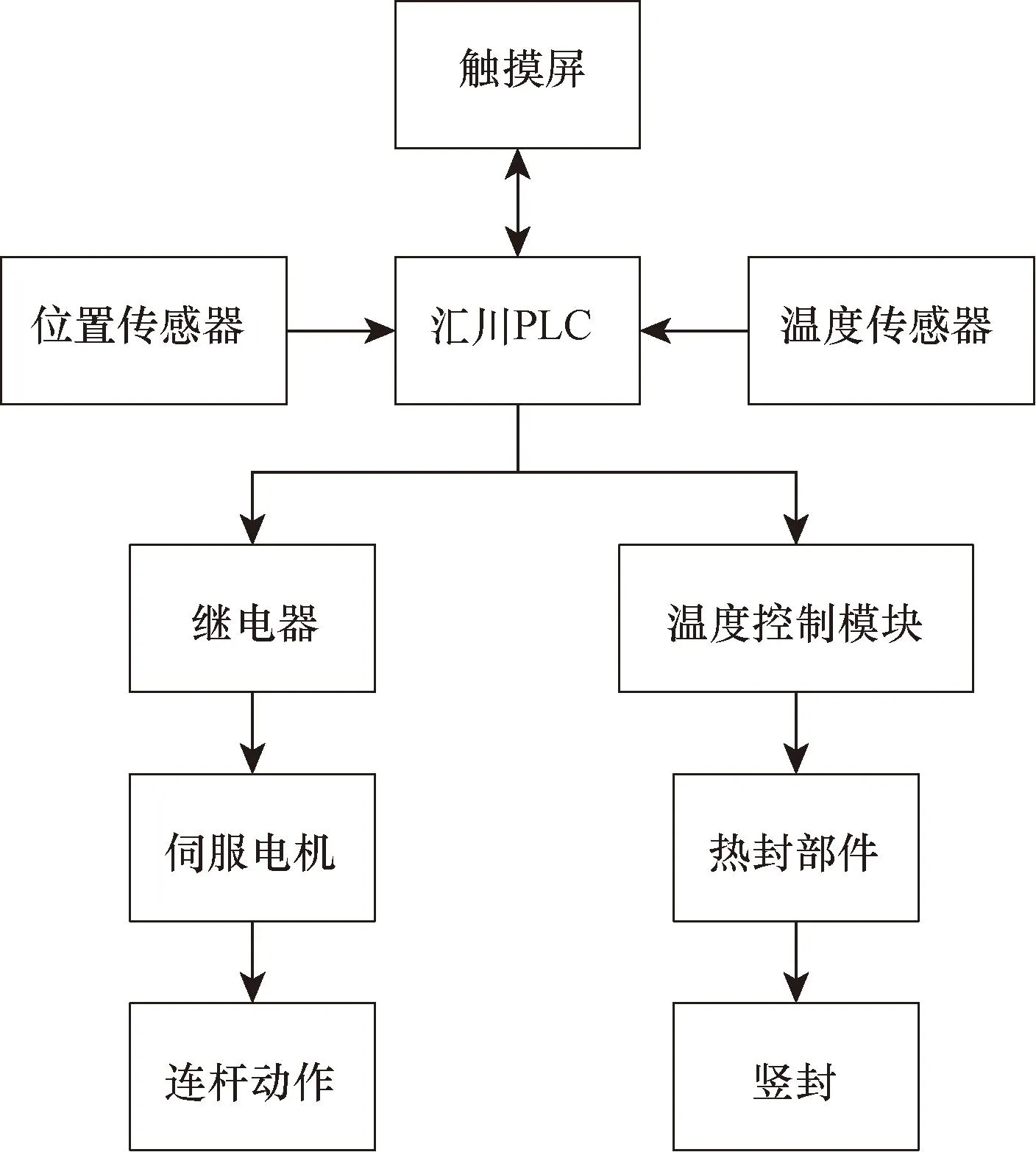
图3 槟榔自动包装机封口装置控制架构Fig.3 Betel nut automatic packaging machine sealing device control architecture
包装机热封系统控制器选用汇川技术公司的AM403经济型中型PLC。该控制器可同时扩展分布式IO,程序容量10 M、数据容量 8 M word,该型号PLC的CPU模块为1608TP,该模块具有10 M程序存储空间、20 M数据存空间,为1路RS485;1路LAN;1路CAN open/CAN link,支持Ether CAT总线,支持8轴运动控制,其中内置16入8出高速IO;源型输出。闭环控制模块采用线性自抗扰温度控制策略实现热封温度控制。
2.2 地址分配
封口装置控制系统包括5个输入信号,其中包括3个开关量输入信号,分别是总开关、急停开关、热封开关,2个模拟量输入信号,即温度传感器、位置传感器,2个输出信号,即连杆机构动作、热封部件动作。PLC的输入输出端口地址分配如表1所示。
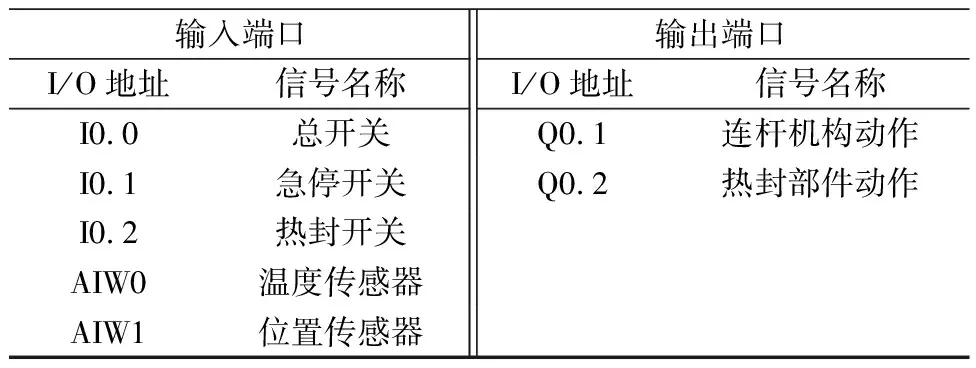
表1 I/O地址分配表Table 1 I/O address allocation table
3 温度控制器
3.1 PID控制算法
在实际应用中,PID控制在工程中得到广泛应用,其结构简单、稳定、可靠,是工业领域的主要控制方法之一[9]。据统计,过程控制中超过85%的使用传统PID控制方法,如果加上由PID延伸出来的控制策略,则其使用范围超过90%。其时域表达式为

(1)
式(1)中:KP、KI、KD分别为比例系数、积分系数、微分系数;t为采样时间;e(t)为系统误差。
3.2 改进型LADRC控制算法
由于PID控制算法对于模型依赖度较高,需精确数学模型,对系统结构变换,参数范围等容忍度不高,以及模糊PID受模糊规则、隶属函数影响,RBF神经网络对复杂系统调节时间过长,同时线性自抗扰控制无需精确数学模型就能克服被控系统的非线性、时变性影响,具有较强的鲁棒性和动态响应能力。因此选用源自PID控制的线性自抗扰控制算法应用于包装机,进行封口装置控制系统设计[10]。
槟榔自动包装机封口装置温度控制系统模型简化后的LADRC二阶对象结构如图4所示。
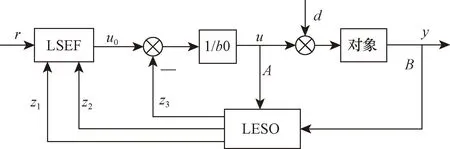
d为外在扰动;r为系统的输入量;y为系统输出量;z1、z2、z3为温控系统观测器状态估计输出;u为控制量;u0为误差反馈控制量;A为控制量u对LESO的输入;B为系统输出量y对LESO的输入;b0为已知部分
图4中LESO为线性扩张状态观测器;LSEF为线性反馈控制律,该部分常采用比例-微分(PD)线性组合形式;其微分方程形式表示为
(2)

温控系统中,系统可知b包含已知、未知两部分,设b0为已知部分,(b-b0)为未知部分,对于温控系统可表示为
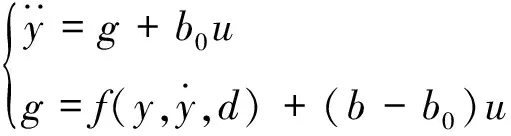
(3)
式(3)中:g为温控系统的观测总扰动。

(4)
式(4)中:
(5)

对于温控控制系统的线性扩张状态观测器为
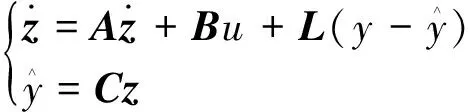
(6)

(7)
温控系统传递函数为
(8)
传统PID控制传递函数为
φpd(s)=s2+kds+kp
(9)
对于温控控制系统,扩张状态观测器和控制器参数为
(10)
式(10)中:ωo为扩张观测器。


(11)
故式(11)可以等效为双输入单输出线性系统。故传递函数矩阵为
(12)
将传统PID控制律代入式(12),通过线性系统叠加定理求出r和y到u的传递函数为
(13)
式(13)等效的二自由度控制器如图5所示。

图5 线性自抗扰控制的等效二自由度控制框图Fig.5 Equivalent 2DOF control block diagram
可以通过传统PID控制器串联二阶低通滤波器来等效D2(s)。

(14)
对比的等效关系为
(15)

(16)
通过求解ωo,即可依次求解出kp、kd、b0。方程的根中会包含共轭虚数解,由于控制器参数不能为虚数,可以直接舍去。对比使用PID控制器,经过前置滤波器相当于一个柔化启动过程。当给定值突变时,有效地减少深度饱和,低通滤波器可以有效过滤高频干扰[11]。
3.3 改进型PSO-LADRC控制算法
虽然改进型LADRC的调节参数较少,但是手动调节精确度仍得不到很好的保证,而且耗时随系统复杂程度变化,因此引入智能算法优化整定控制器参数是有必要的。
粒子群算法将个体视为D维空间中的一个粒子,这种粒子无质量与体积在解空间运动[12]。这些粒子具备记忆能力,常常聚集于以往运动最优位置及相邻最优位置,因其参数少、实施简便、优化性能良好等优点而受到广泛关注。
关于 PSO算法的粒子在搜索空间中的更新前后的速度和位置的公式[13]为
vt+1=wvt+c1r1(Pt-xt)+c2r2(Gt-xt)
(17)
xt+1=xt+vt+1
(18)
式中:xt为粒子位置;v为粒子速度;w为惯性权重系数,通常将其用线性递减的形式表示,如式(19)所示;c1、c2为加速常数;r1、r2为[0,1] 产生的随机数;Pt与Gt为粒子和整个粒子群搜索到的最佳位置。
(19)
式(19)中:wmax和wmin为最大和最小权重值;t和tmax为当前和最大迭代数。
PSO算法优化LADRC流程如下。
(1) 初始化结构参数。设定学习因子,群体粒子个数,惯性权重,搜索迭代次数。
(2) 初始化群体粒子速度和位置。随机产生与w0、wc对应的2维向量,且经映射后获得随机位置与速度的初始粒子群体。
(3) 更新个体与群体极值。迭代计算获取粒子当前适应度并更新最优适应度,使Pt、Gt都得到更新。
(4) 判断是否寻优结束。如果满足迭代最大次数或者规定误差的结束条件,则获得最优解,否则返回步骤(2)继续运行。
4 封口装置仿真分析与实验应用
4.1 包装机热封系统仿真分析
为直观展示文中方法通过 MATLAB/Simulink进行验证。在 Simulink仿真环境下,设定PID控制器参数kp=0.2,ki=0.01;LADRC控制器参数为:w0=1.0,wc=0.6。
4.1.1 LADRC可行性分析
在单位阶跃输入下,通过系统输出端的输出幅值作为检验标准,系统运行300 s内的作用效果仿真如图6所示。从图6中明显看出LADRC控制器系统各项指标与观测值基本一致、跟踪效果良好、系统误差保持在零点,证明LADRC控制可以适用于封口装置温度控制系统。
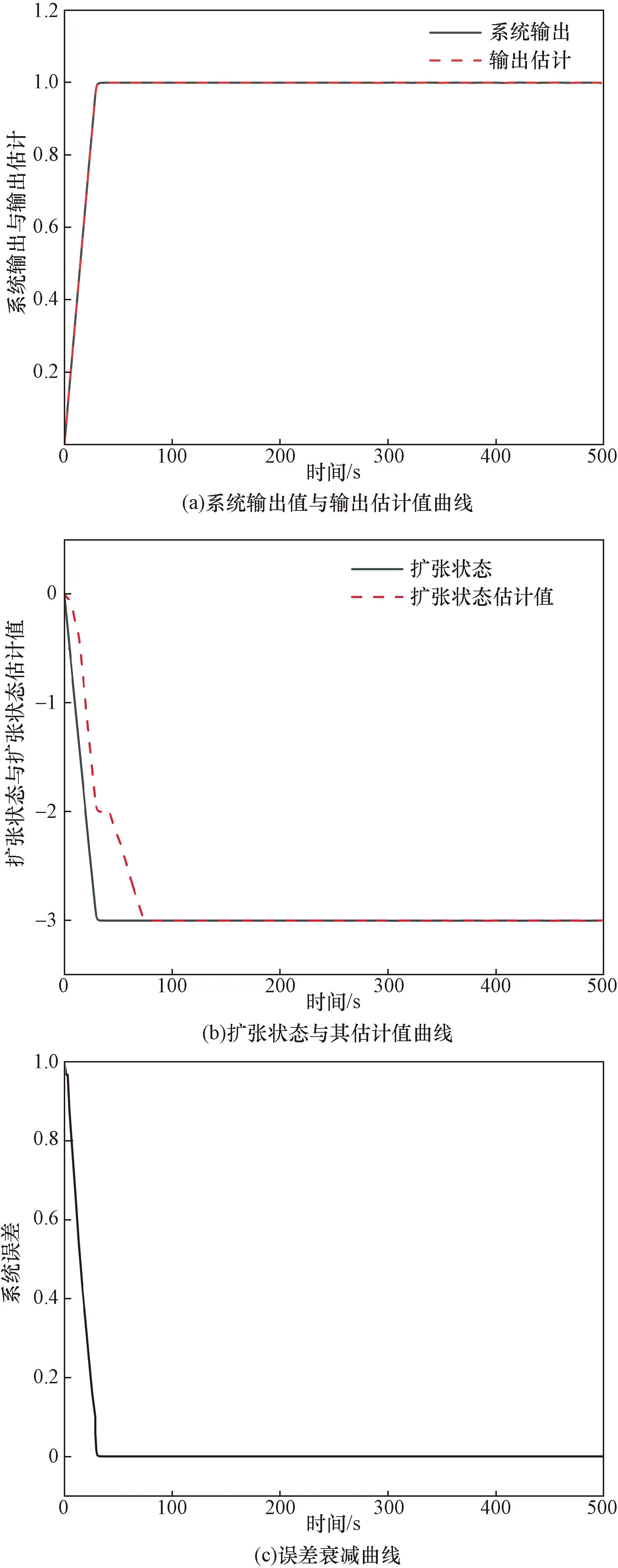
图6 线性自抗扰控制器作用效果图Fig.6 Effect diagram of LADRC controller
4.1.2 传统PID、未优化LADRC、改进型PSO-LADRC三者对比
通过粒子群算法优化,PSO算法整定后控制器参数为:h=10-2,b0=0.3,w0=1.2,wc=0.8;由于封口装置温度控制具有时变性以及非线性,在系统正常运行250 s后添加幅值为0.5的阶跃干扰,正弦干扰信号和白噪声干扰,白噪声参数设置为: PSD高度为0.01,相关时间t为0.01,结果如图7和表2所示。
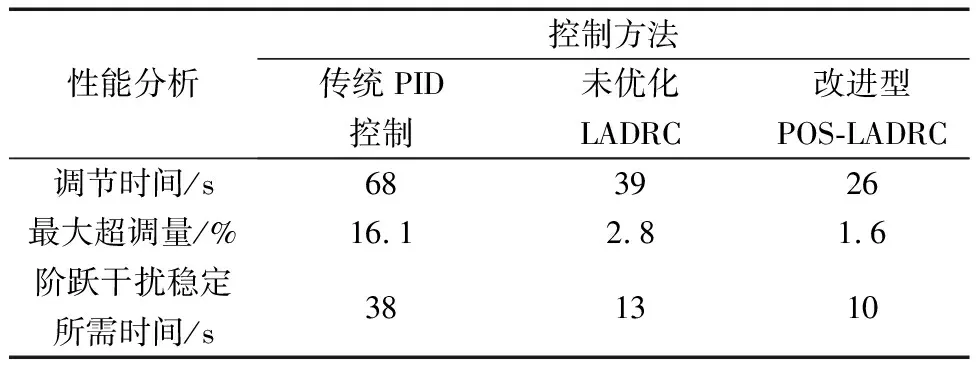
表2 不同控制方法性能对比Table 2 Control effect when setting different temperatures
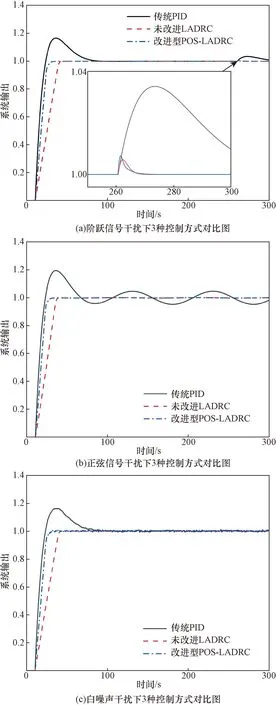
图7 扰动情况下系统输出对比曲线Fig.7 System output comparison curve under disturbance
通过Simulink仿真结果对比可得。首先,在稳定性以及鲁棒性方面。对于外界的不同干扰,改进型POS-LADRC算法比传统PID、LADRC控制效果明显,抑制能力明显优于传统方法。
由表2可以看出,在阶跃干扰情况下文中方法再次稳定的时间明显快于传统PID。在白噪声干扰情况下,传统给控制方法误差较文中方法明显处于劣势;在正选信号干扰下,传统方法产生较大超调,且稳定时间长,文中方法具有稳定性。其次,在快速性方面,文中方法优先于传统PID达到控制效果,对比上述结果可以得出改进型POS-LADRC方法优于传统控制方法,明显文中方法可以适用于时变性、非线性控制系统。
4.2 包装机热封系统实验应用
为验证改进型POS-LADRC控制算法的实际应用性能,设计槟榔包装实验验证。设置温度为50 ℃和100 ℃,在不同的实际温度下两种控制方法的最终温度如表3所示,实验结果表明传统PID控制温度误差大于1 ℃,对应的文中方法控制的温度误差为0.4 ℃左右。对比可见在实际应用平台改进型POS-LADRC控制器可以实现对封口装置温度的精准温控。
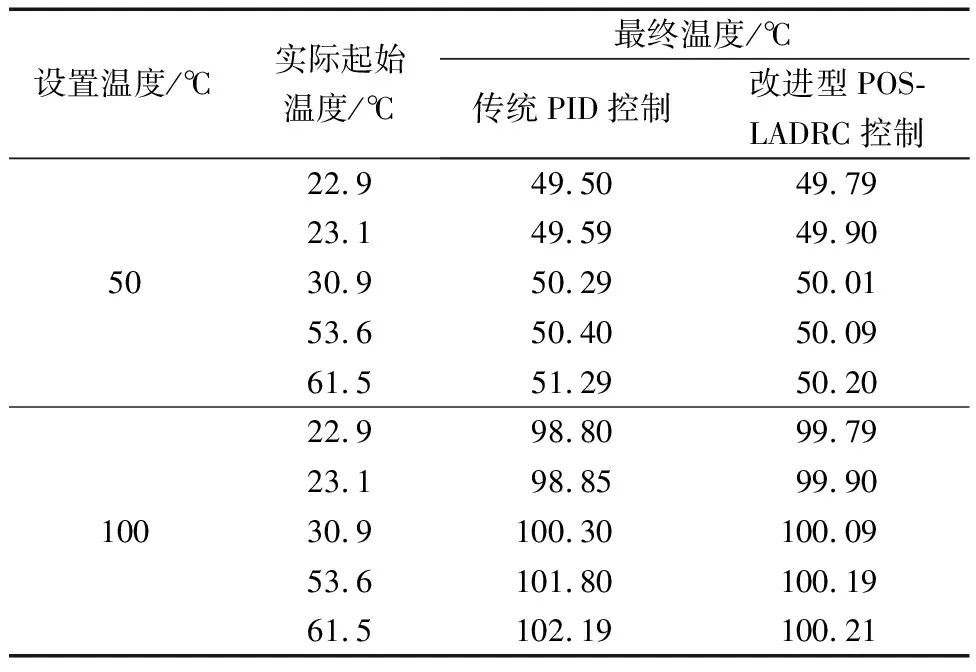
表3 设置不同温度时控制效果Table 3 Control effect when setting different temperatures
在表3的基础设定封口装置温度为120 ℃,并运行500 s对比传统PID控制和改进型POS-LADRC控制结果如图8所示,实验结果表明文中方法控制可以将温度控制在118.2~120.1 ℃,然而传统PID控制只能将温度控制在118.1~123.2 ℃,通过对比明显文中方法控制可以精准控制温度。
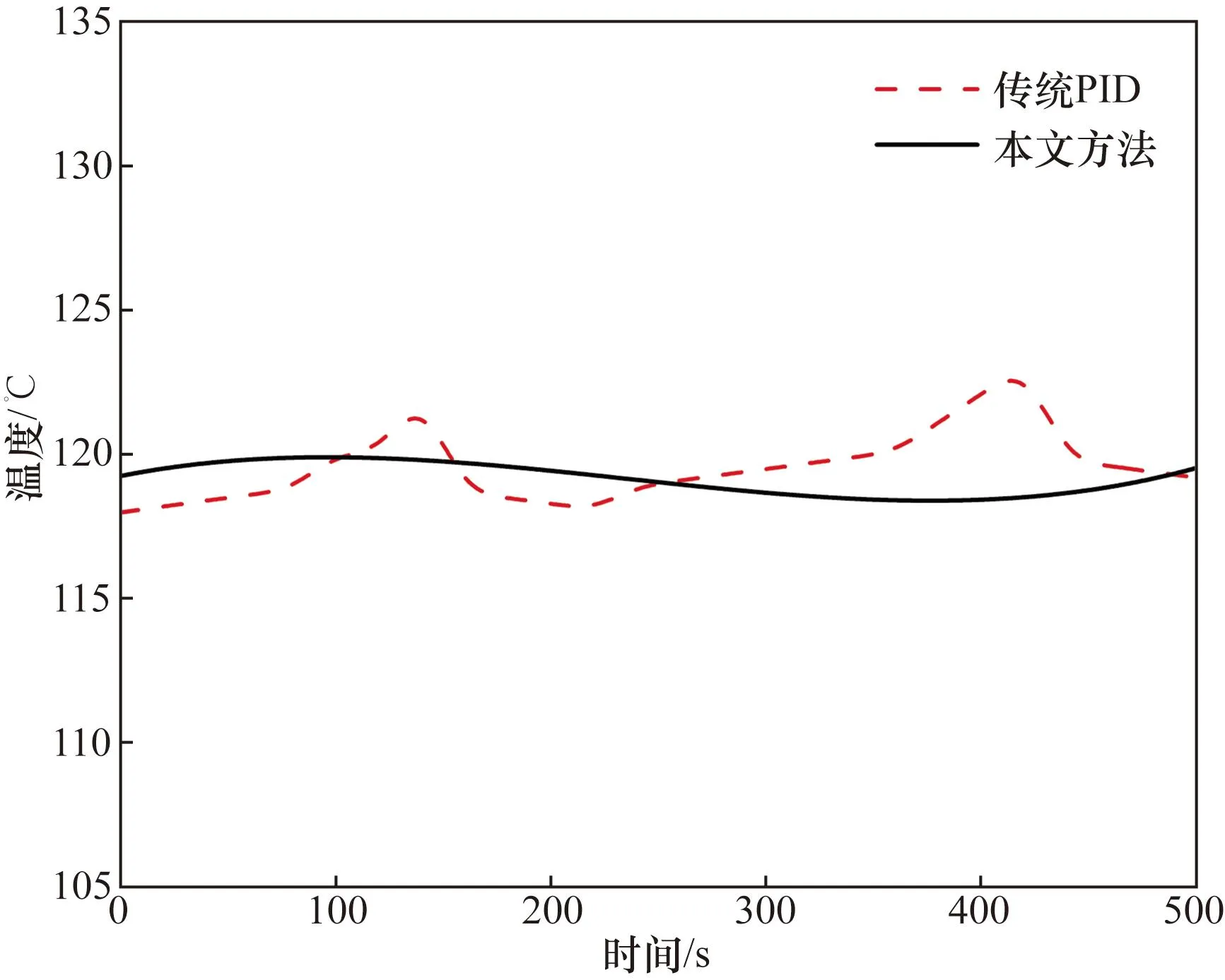
图8 系统响应输出对比曲线Fig.8 System response output comparison curve
在图8中,当包装机运行250 s时施加5 ℃的温度扰动,传统PID控制收到扰动恢复的时间较长,文中方法控制收到扰动后可以有效地抗扰动,可以有效实现对温度的控制。
使用传统PID控制器,将温度控制在±5 ℃。当使用改进型POS-LADRC控制算法后,温度波动较小,如图9所示温度能够控制在±0.9 ℃,图10为槟榔包装机热封实物图片,实际验证效果良好。
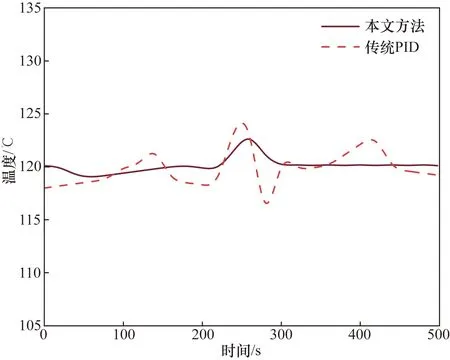
图9 扰动情况下系统输出对比曲线Fig.9 System output comparison curve under disturbance
图10 槟榔包装机热封实物Fig.10 Betel nut packaging machine heat sealing physical
5 结论
对于槟榔自动包装机封口装置中存在温度精度问题,将LADRC二自由度等效为传统PID控制和低通滤波器,通过设计PID控制器参数结合粒子群算法(PSO)优化,来进行参数优化实现温度的实时控制,可以改善温度控制效果不佳带来的食品包装良率问题。通过仿真与相关实验,验证改进型PSO-LADRC在不同温度和干扰情况下的鲁棒性,有效地将温度误差控制在0.9 ℃以下,明显改善封口装置的生产良率,证明该方法具有可行性。
猜你喜欢
基层中医药(2021年11期)2021-06-05
装备制造技术(2021年1期)2021-05-21
科学大众(2020年12期)2020-08-13
时代农机(2018年5期)2018-02-01
读书文摘(2017年10期)2017-10-16
民族音乐(2016年1期)2016-08-28
电子制作(2016年23期)2016-05-17
机电信息(2014年23期)2014-02-27
机电信息(2014年20期)2014-02-27
中国现代中药(2012年6期)2012-10-30