
数字孪生架构下的智慧微电网多智能体协调优化控制技术研究
2024-02-06 03:36何安明
机械设计与制造工程 2024年1期
向 辉,何安明
(国网信通股份公司安徽继远软件有限公司,安徽 合肥 230088)
在现代社会,人们依靠各种能源与资源才能持续生存和发展,因此对能源与资源的需求一直在不断增加,能源的重要性不言而喻。在各种能源、资源中,电力作为最清洁和便利的一种,应用最为广泛,需求量也最多,仅依靠电力公司集中供电已经无法满足持续增长需求,导致经常发生停电事故[1]。在此背景下,由各种分布式电源组成的微电网成为一种有效的解决方式。微电网中包含多种智能体,如燃料电池、光伏电池、蓄电池、燃气轮机等。这些电力供应智能体可以并入大电网,也可以独立供电。前者主要发生在大电网正常运行情况下,并入大电网后,可以极大缓解大电网供电压力,提高电力供应效率。后者主要是在大电网发生故障时,电力供应智能体断开与大电网的连接后进入孤岛模型独立进行供电,以达到持续供电而不断电的目的[2]。然而,无论是何种模式,随着智能体微源数量、微电网规模越来越大,结构也越来越复杂,微电网控制难度变得越来越大,给微电网运行经济性、稳定性、安全性等带来了极大的影响。
基于上述背景,如何实现对智慧微电网多智能体协调优化控制成为研究的重点。针对该问题,在很多文献中都进行了相关研究。例如,翟雨稼等[3]考虑到气候变化对微电网供电的影响,以微电网电压平衡稳定为目标,建立微电网互联控制模型,并在功率约束条件下求出模型最优解。周成等[4]针对微电网电压不稳定的问题,借助未来时段的预测模型预测微电网电压值,并以电压偏差最小为目标,在3种约束条件下借助CPLEX 进行求解,得出最佳控制方案。潘晨等[5]为了实现用户侧与微电网供电潜力之间的最大互动,建立包含经济性和自治性的双重目标,最后通过寻优算法进行求解,得出控制方案,并通过评价指标对控制策略进行评估,验证方案的有效性。
数字孪生类似一种仿真技术,借助该技术,能够实现操作过程的模拟。结合前人研究经验,本文提出一种数字孪生架构下的协调优化控制技术,以期能够有效控制智慧微电网多智能体,提高微电网运行的安全性、经济性、稳定性。
1 数字孪生下的智慧微电网多智能体协调优化控制研究
近年来,电力企业大电网已经无法满足需要,经常发生停电事故,给经济活动和生产活动都带来了很多的影响和干扰。为解决此问题,将微电网逐渐接入大电网中,极大缓解了大电网的供电压力,提高了电力供应质量。然而,随着微源智能体的不断增加,微电网规模逐渐扩大,结构更加复杂,使得智慧微电网控制很难达到最佳效果,经济目标、稳定性目标、安全性目标等都与预期结果存在一定的差异[6]。针对这一问题,本文提出一种数字孪生下的智慧微电网多智能体协调优化控制技术。数字孪生类似一种仿真技术,将其应用到研究中,能够进行智慧微电网多智能体协调优化控制模拟,从而求出最佳协调优化控制方案。本文对协调优化控制方案的设计主要分成4步执行,即数字孪生架构下的技术框架设计、协调优化控制模型构建、约束条件设置以及模型求解。
1.1 数字孪生架构下的技术框架设计
借助数字孪生架构,设计智慧微电网多智能体协调优化控制技术框架,如图1所示。
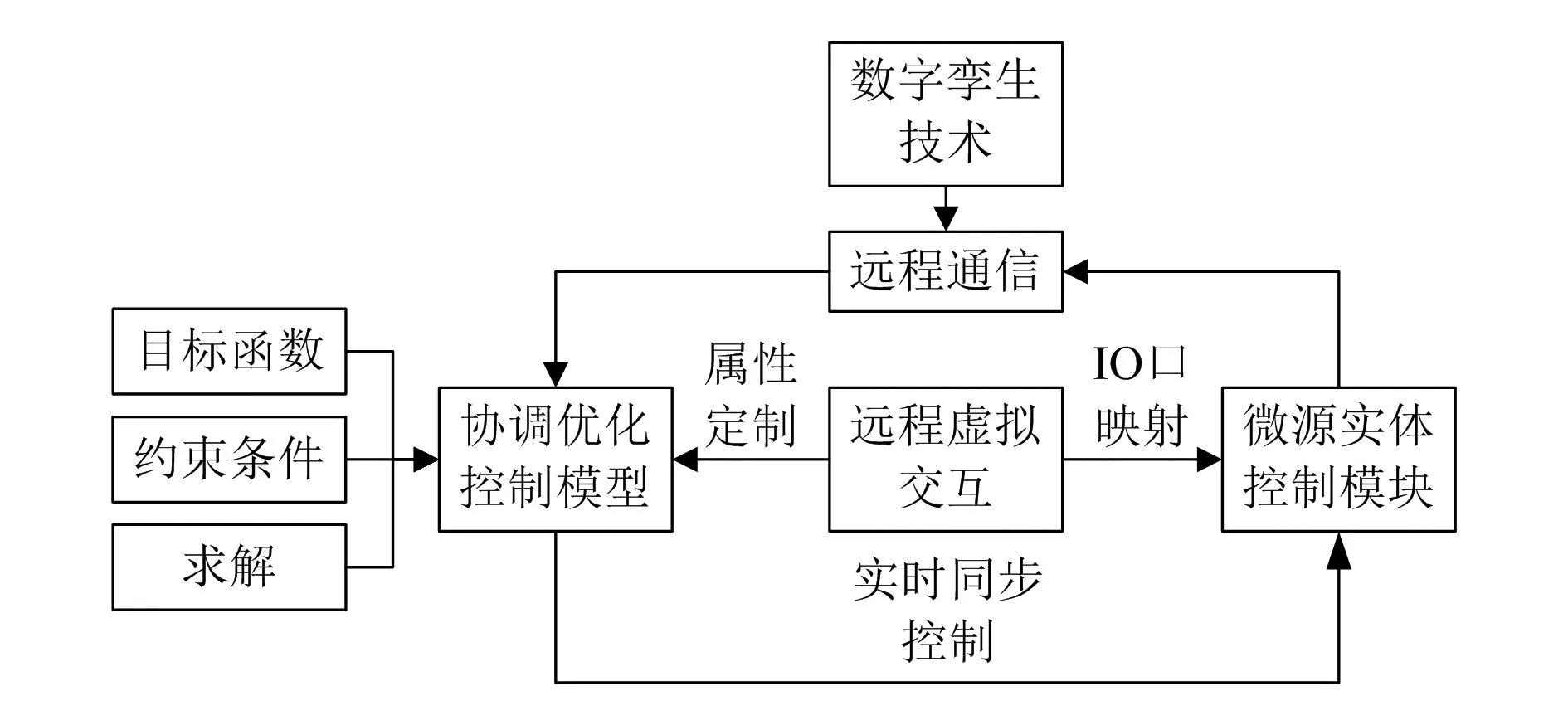
图1 数字孪生下微电网多智能体协调优化控制技术框架
借助数字孪生技术,将协调优化控制方案与微电网中各个智能体同步联系到一起,通过计算机模拟得出的最佳方案在远程通信技术支持下实时、同步控制各个微源运行。
数字孪生下微电网多智能体协调优化控制技术中最关键的环节是建立协调控制策略,即通过求解协调控制模型,得出最优化协调控制方案[7]。下面针对优化协调控制方案的求解过程进行具体分析。
1.2 协调优化控制模型构建
智慧微电网多智能体协调优化控制模型,即建立智慧微电网多智能体协调优化控制后所要达到的目标。本文以经济性指标——经济支出最少作为目标函数[8],建立协调优化控制模型。模型表达式如下:
minF=w1f1+w2f2
(1)
式中:minF表示经济支出最少;f1为微电网运行成本支出;f2为环境维护成本支出;w1、w2为加权系数,w1+w2=1[9]。
1)微电网运行成本支出。
为了分析微电网的运行成本支出,考虑了不同方面的费用,并将其整合到控制模型中。首先,关注微电网的运营时间段T,并将其划分为具体的作业时间t。在每个作业时间内的微电网运行成本支出是由该时间段内智能体的燃料费用、维护费用、折旧费用、停电赔偿费用和电能交易费用组成。微电网运行成本支出最少的表达式为:
(2)
其中:
(3)
(4)
(5)
(6)
(7)

2)环境维护成本支出。
在微电网协调优化控制模型中,考虑到微电网运行过程中产生的污染物所带来的环境负担,将环境维护成本支出作为考虑因素之一,旨在减少微电网对环境的负面影响。环境维护成本支出由两部分组成,分别为智能体运行时产生的污染物罚款费用和主网运行时产生的污染物罚款费用。在计算环境维护成本支出时,引入了微电网的考虑系数ζ,用于调整微电网中智能体和主网对环境维护成本支出的权重比例。环境维护成本支出最少的表达式为:
(8)
式中:minf2表示环境维护成本支出最少,M为污染物的总类别数,Rk为治理每千克污染物所花费的成本,αik为智能体i运行时所产生污染物k的罚款费用率,βk为主网运行时产生污染物k的罚款费用率。
本文所构建的协调优化控制模型由两部分组成,即微电网运行成本和环境维护成本[10]。在考虑微电网运行成本和环境维护成本的同时,还应追求它们的最小化,以实现经济效益的最大化。
1.3 约束条件设置
本文所构建的目标模型只有在特定的限制条件下才能求解出结果。这些特定的限制条件被称为约束条件。本章节给公式(1)设置的约束条件有5个,具体如下:
1)供需平衡约束。
供需平衡约束是指微电网的有效负载需求与多个智能体输出的有功功率之和相等,即二者相减等于0[11]。供需平衡约束描述如下:
(9)
式中:S为微电网的有效负载需求。
2)智能体电压约束。
智能体电压约束是指智能体的运行电压要在限定的范围内[12]。电压约束描述如下:
(10)

3)爬坡约束。
爬坡约束是指单位时间内智能体能增加或减少的功率情况约束[13]。爬坡约束描述如下:
(11)

4)运行容量约束。
运行容量约束是指智能体发出功率要在上限与下限之间[14]。运行容量约束描述如下:
(12)

5)交易功率约束。
交易功率约束是指微电网和大电网允许交换功率的范围[15]。交换功率约束描述如下:
(13)

1.4 模型求解
模型求解是协调优化控制策略的最后一步,主要是在约束条件下,利用寻优算法求取满足模型的最优解。本文利用改进粒子群算法进行求解,具体过程如图2所示。

图2 改进粒子群算法求解流程
传统粒子群存在容易陷入局部最优的问题,而这一问题主要是惯性权重系数导致的[9]。为此对惯性权重系数进行改进,改进公式为:
(14)
式中:w为惯性权重系数;w3为初始权重,取值0.9;w4为结束权重,取值0.4;W为最大迭代次数。
基于改进粒子群算法完成模型求解,即可得出最优智慧微电网多智能体协调优化控制方案。
2 算例分析
2.1 数字孪生微电网仿真模型构建
借助数字孪生技术构建数字孪生微电网仿真模型,如图3所示。
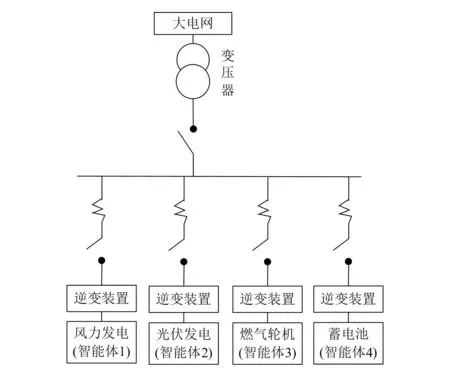
图3 数字孪生微电网仿真模型
图3中微电网主要由4个智能体(微源)组成,这4个智能体相关参数见表1。
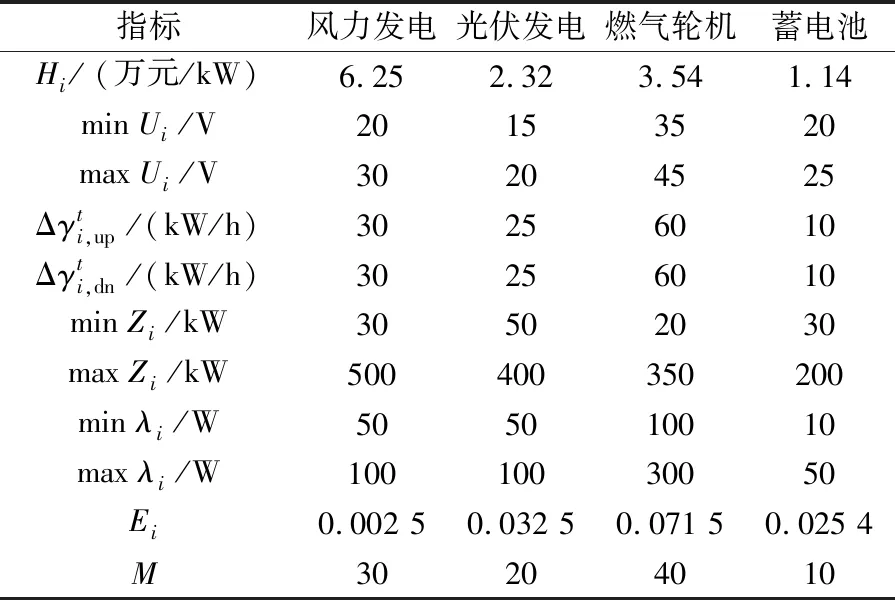
表1 智能体(微源)相关参数
2.2 模型求解初始化参数设置
利用改进粒子群算法对构建的智慧微电网多智能体协调优化控制模型进行求解,所设置的初始化参数如下:种群大小为50;最大迭代次数为200;学习因子c1=0.23,c2=0.15;惯性权重w3=0.9,w4=0.4;均匀分布参数r1=0.05,r2=0.10。
2.3 各智能体运行方案
应用本文研发的协调优化控制技术后,各智能体运行方案如图4所示。

图4 各智能体运行方案
从图4可以看出,协调优化控制技术应用后,风力智能体被配置为具有最高功率的智能体。这表明系统在满足电力需求的同时,充分利用了风能资源,实现了风力发电的最大化。光伏智能体和燃气轮机智能体相对于风力智能体的功率较低,这是因为系统更倾向于优先使用风能资源,并在需要时才使用光伏和燃气轮机补充。蓄电池智能体的出力较低,这是因为蓄电池以储存和释放电能的方式来应对电网波动需求,通常作为储备能量和调峰的措施,因此在协调优化控制技术下,蓄电池智能体的使用被最小化。综上所述,应用协调优化控制技术后,系统能够合理分配各种能源,最大限度地利用可再生能源,并满足电力需求,实现了经济性和可持续性的平衡。
2.4 经济效益对比分析
按照提出的方案,计算各智能体运行24 h的支出费用,并将这些数据与技术应用前的原始支出费用进行对比,结果见表2。
从表2可以看出,协调优化控制技术应用后较应用前,费用支出更少,由此证明本文所研发的技术达到了协调控制效果。
3 结束语
本文提出了一种应用于智慧微电网系统的协调优化控制技术,实验结果证明该技术在经济效益和环境保护方面取得了显著成果,但是仍存在一些待解决的问题,例如在不同季节和天气条件下的运行策略。与以前的研究相比,本文着重于多个智能体间的协调和多目标优化,并对经济支出和环境维护成本进行了综合分析。在理论上,本文构建了基于协调优化控制技术的智慧微电网运行模型,并采用了经济支出最小和环境维护成本最小作为目标函数,实现了经济效益和环境友好性的平衡。在应用上,该技术为智慧微电网系统的设计和运行提供了重要参考,并具有实际应用的潜力。当然,还需要进一步深入研究,探索更准确和全面的模型,并加强与实际微电网系统的结合,以验证其可行性和有效性。未来的研究应该扩大应用场景和优化策略,推动智慧微电网技术的进一步发展。
猜你喜欢
数学大王·趣味逻辑(2021年11期)2021-12-03
加油站服务指南(2021年4期)2021-07-21
数学年刊A辑(中文版)(2020年1期)2020-05-19
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
照明工程学报(2016年3期)2016-06-01
河南电力(2016年5期)2016-02-06
河南电力(2015年5期)2015-06-08
河南电力(2015年5期)2015-06-08
人生十六七(2015年6期)2015-02-28
