某发射装置应急控制设计与实现
2024-02-04 04:13王天辉付京来
计算机测量与控制 2024年1期
王天辉,付京来
(中国人民解放军 91851部队,辽宁 葫芦岛 125001)
0 引言
发射装置是导弹武器系统的重要组成部分,能够为导弹的发射提供初始指向[1-2]。某发射装置可根据射击需要,调转到指定发射方向和发射角度,为某型靶弹发射提供稳定的初始姿态[3-4]。但由于装备服役年限、使用频率、人员素质、使用环境等因素影响,其控制系统可靠性降低,电动控制存在偶发故障,为提高发射装置的可靠性,提升装备保障效率,以现有装备,减少装备改动,保留原有功能的原则,设计一种应急控制方案,从而大大提高装备的可靠性和使用效能。
1 系统组成及应急控制分析
1.1 系统组成
发射装置具有俯仰和方位两个自由度,包括:起落臂、转台、俯仰推杆系统、方位推杆系统控制系统、手持盒、锁止装置、基座等。起落臂主要用于支撑和固定发射箱;转台安装于发射装置基座与起落臂之间,是实现发射装置起落臂的俯仰和方位控制的机械部件;俯仰推杆系统主要由俯仰电动缸、驱动器和俯仰支架构成,用于驱动发射装置完成俯仰动作;方位推杆系统主要由方位电动缸、驱动器和方位支架构成,用于驱动发射装置完成方位动作;控制系统由主控制箱和配套电缆组成,可按手持盒或发控设备传输过来的指令对俯仰机构和方位机构进行精确控制[5-7];手持盒是人机交互工具,实现角度的输入和发射装置状态监视;锁止装置主要用于发射装置运动到位后的锁定;基座为控制系统、方位电动缸、驱动器提供安装空间,并起落臂离地高度。
1.2 应急控制分析
发射装置工作原理如图1所示。由图可以看出,发射装置要正常调转,至少需要供配电系统、手持盒、控制系统、俯仰/方位推杆系统、俯仰/方位角度传感器、方位锁紧装置等工作正常。

图1 发射装置工作原理图
俯仰/方位推杆系统由驱动器和电动缸构成,该产品为成熟通用产品,可靠性好[8-9]。因此,针对原控制系统可靠性不高的现象,利用原俯仰/方位推杆系统,设计一种应急控制方式,实现发射装置调转,调转到位后对发射装置进行手动锁定。应急控制实现原理图如图2所示,驱动器可控制电动缸运行速度,可对速度进行时间积分,可求得电动缸运行距离。

图2 发射装置应急控制实现框图
发射装置根据射击要求,对发射装置进行一定角度的俯仰和方位调转,而电动缸仅能实现伸长和收缩运动,要实现发射装置的角度控制,就需要建立发射装置俯仰和方位的数学模型,将需要转动的角度信息转换为电动缸的运动距离。
2 数学模型分析
2.1 俯仰转动数学模型
本发射装置要求俯仰运动范围为0o~60o,俯仰0°和60°为发射装置俯仰运动极限位置。发射装置俯仰驱动的极限位置如图3所示,转台上的起落臂支耳与电动推杆下支耳水平距离740 mm,竖直距离600 mm,电动推杆上支耳距离转台起落臂支耳距离2 565 mm。当起落臂位于水平状态(俯仰角度为0°)时,电动推杆长度1 921.3 mm,倾角为18°;随着电动推杆逐渐伸长,起落臂俯仰角度逐渐增大,当角度达到60°时,电动推杆长度2 873.04 mm。
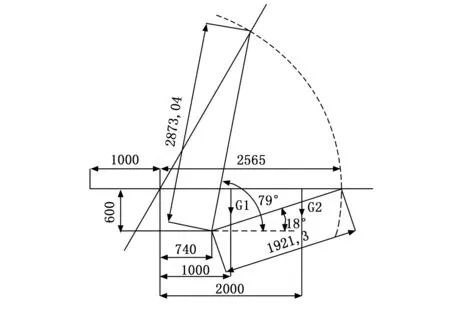
图3 发射装置俯仰驱动极限位置示意图
根据发射装置俯仰驱动极限位置示意图建立俯仰转动的数学模型如图4所示,A点为电动缸推杆的固定支持点,AB为发射装置俯仰初始零位的电动缸长度,AC为发射装置俯仰γ角度时电动缸的长度。
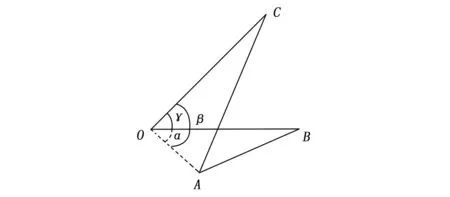
图4 俯仰转动数学模型
在该数学模型中,∠COB的角度设定为γ,该角度为俯仰转动角度。∠AOB的角度设定为α,∠COA的角度设定为β,则有
γ=β-α
(1)
图中AB的长度为初始状态LAB=1 921.3 mm,设定电动缸伸出S,则电动缸伸出后的长度LAC为
LAC=LAB+S
(2)
由图4可知,LOA=952.68 mm,LOC=LOB=2 565 mm,在三角形AOB和AOC中有

(3)
(4)
由公式(1)、公式(3)和公式(4)可得
(5)
由公式(2)和公式(5),可得
1921.3
(6)
若发射装置俯仰角位处于初态,应先用光学象限仪测得发射装置俯仰初始角度,根据公式(6),求得此时电动缸的伸长量S0,同理可求得目标俯仰角下电动缸的伸长量S1,则电动缸的运动长度为S1~S0。通过上位机向驱动器发送俯仰速度帧,来控制俯仰电动缸俯仰运行速度,从而达到控制俯仰电动缸运行长度的目的。
2.2 方位转动数学模型
发射装置方位范围为-45°~45°,方位-45°和45°为发射装置俯仰运动极限位置。发射装置方位极限位置如图5所示,方位推杆与基座相连的支耳距转台中心水平距离1 250 mm,竖直距离190.8 mm,转台方位角度处于零位时,电动推杆长度1 252.56 mm,当电动推杆回缩至1 059.08 mm时,转台向一个方向旋转45°。若定义此方向角度为正,则当电动推杆伸长至1 440.93 mm时,转台将旋转-45°。

图5 发射装置方位驱动极限位置示意图
根据发射装置方位驱动极限位置示意图建立方位转动的数学模型如图6所示。O点为转动中心,B点为电动缸固定点,AB为发射装置方位零位时电动缸长度,BC为发射装置转动γ角度时电动缸长度。

图6 方位转动数学模型
在该数学模型中,∠AOC的角度设定为α,该角度为发射装置方位转动角度。∠AOB的角度设定为β,∠COB的角度设定为γ,则有
γ=β-α
(7)
发射装置方位角度为0°时,电动缸初始长度LAB=1 252.56 mm,设定电动缸伸出S(向右转动为正角度,此时电动缸伸出为负值),则电动缸伸出后的长度AC为
LBC=LAB+S
(8)

(9)
在三角形BOC中有

(10)
由公式(7)、公式(9)和公式(10)可得
(11)
由公式(8)和公式(11),可得
1252.56
(12)
若发射装置俯仰角未处于初态,应先用炮瞄镜测得发射装置方位初始角度,根据公式(12),求得此时电动缸的伸出量S1,同理可求得目标方位角下电动缸的伸长量S2,则电动缸的运动长度为S2~S1。通过上位机向驱动器发送方位速度帧,来控方位电动缸运行速度,从而达到控制方位电动缸运行长度的目的。
3 基于Qt的软件设计
3.1 软件总体架构设计
本应急控制软件采用Qt开发,Qt是由诺基亚公司开发的一款强大的跨平台的C++图形用户界面应用程序框架开发平台[10-12]。它具备优良的跨平台特性、组件编程和丰富的控件资源,可以为开发者提供健全且美观的用户界面功能[13-14]。
软件采用模块化设计思想,整个软件分为模型解算模块、通信模块、人机交互模块等三部分,采用模块分割设计,进行模块封装,简化各模块之间的耦合关系。
人机交互模块:提供人机操作界面,查看电动缸实时状态,输入发射装置的当前角度和目标角度,并实时显示发射装置的运动角度。
解算模块:根据输入的角度和发射装置的数学模型,计算方位电动缸和俯仰电动缸的运动长度,并将计算的结果传递给数据通信模块。
数据通信模块:是完成上位机和驱动器的串口通信,按照通信协议,以1帧/10 ms的速率向驱动器发送指令,并以1帧/50 ms的速率接收驱动发送的电动缸状态帧。
3.2 人机交互模块设计
软件界面是人机交互的主要途径,要完成软件的界面设计,首先要设计软件界面的基本框架[15-16]。根据软件要实现的功能,设计界面可分为串口设置区、状态显示区和操作控制区,图7为发射装置应急控制软件主界面。

图7 发射装置应急控制软件主界面
3.2.1 串口设置区
在初始状态下,可以通过下拉列表选择对应的可用串口号,“打开串口”和“关闭串口”采用同一个按钮,当串口打开时,该按键变为“关闭串口”,初始状态该按键为“打开串口”。
3.2.2 状态指示区
状态指示区分俯仰状态指示和方位状态指示,在初始状态下,方位状态和俯仰状态指示灯为灰色,对应灯有相应的说明。在收到电动缸反馈的状态后,状态指示区能够根据收到数据,用红灯和绿灯来显示电动缸状态,同时在状态灯前用文字描述对应电动缸状态。指示灯采用自定义控件实现,通过自定义函数setLedState(quint8 fangx,quint8 ledState)来设置对应指示灯状态。
3.2.3 操作控制区
操作控制区包括俯仰控制和方位控制,首先要输入发射装置当前的角度,俯仰角度范围为0°~60°,方位角度范围为-45°~45°,当输入范围或者计算结果超过电动缸的运转范围,会弹出相应的提示框,提示输入超过范围。当设置当前角度满足范围要求时,对应的表盘及表盘下方显示数据显示当前发射装置角度。同理可设置目标角度,即发射装置要转动到的角度。
当完成“设置当前角度”和“设置目标角度”后,点击运行按钮,若此时串口未打开,会弹出提示框提示“打开串口”。若此时串口打开正常,点击运行会弹出提示:“询问发射装置的锁定机构是否松开”。防止因锁定机构未松开,转动发射装置造成发射装置损坏。若此时未松开锁定机构,则点击提示框“NO”按钮,发射装置不转动,可进行锁定机构松开操作。若此时已经松开锁定机构,则点击提示框的“Yes”按钮,发射装置转动,同时对应的仪表盘实时显示发射装置转动角度。仪表盘采用自定义控件实现,编写仪表盘类Dashboard,在主类中调用该类。
当在发射装置转动过程中,发现发射装置周边有异常情况时,可点击操作区的“急停”按钮,发射装置迅速停止。
3.3 解算模块设计
解算模块主要是根据输入角度和目标角度,依据发射装置的模型,解算电动缸运动距离。解算模块封装为double moveSlove(double angle,bool ch)函数,参数angle为发射装置角度,ch对应发射装置的通道,1表示俯仰通道,0表示方位通道,返回值为发射装置角度对应的电动缸伸长距离。下面以俯仰角度为例进行阐述。
假设当前俯仰角度为20°,目标角度为60°,按键“设置目标角度”对应的槽函数为void on_Btn_AimAngle_fy_clicked(),在槽函数中调用解算模型函数moveSlove,可求得20°和60°对应的电动缸长度,两者相减即可求得电动缸的运动距离,当结果为负数时,表示电动缸为收缩运动,若求解结果超过电动缸运动范围,软件弹出提示框提示。解算模块设计流程图如图8所示。
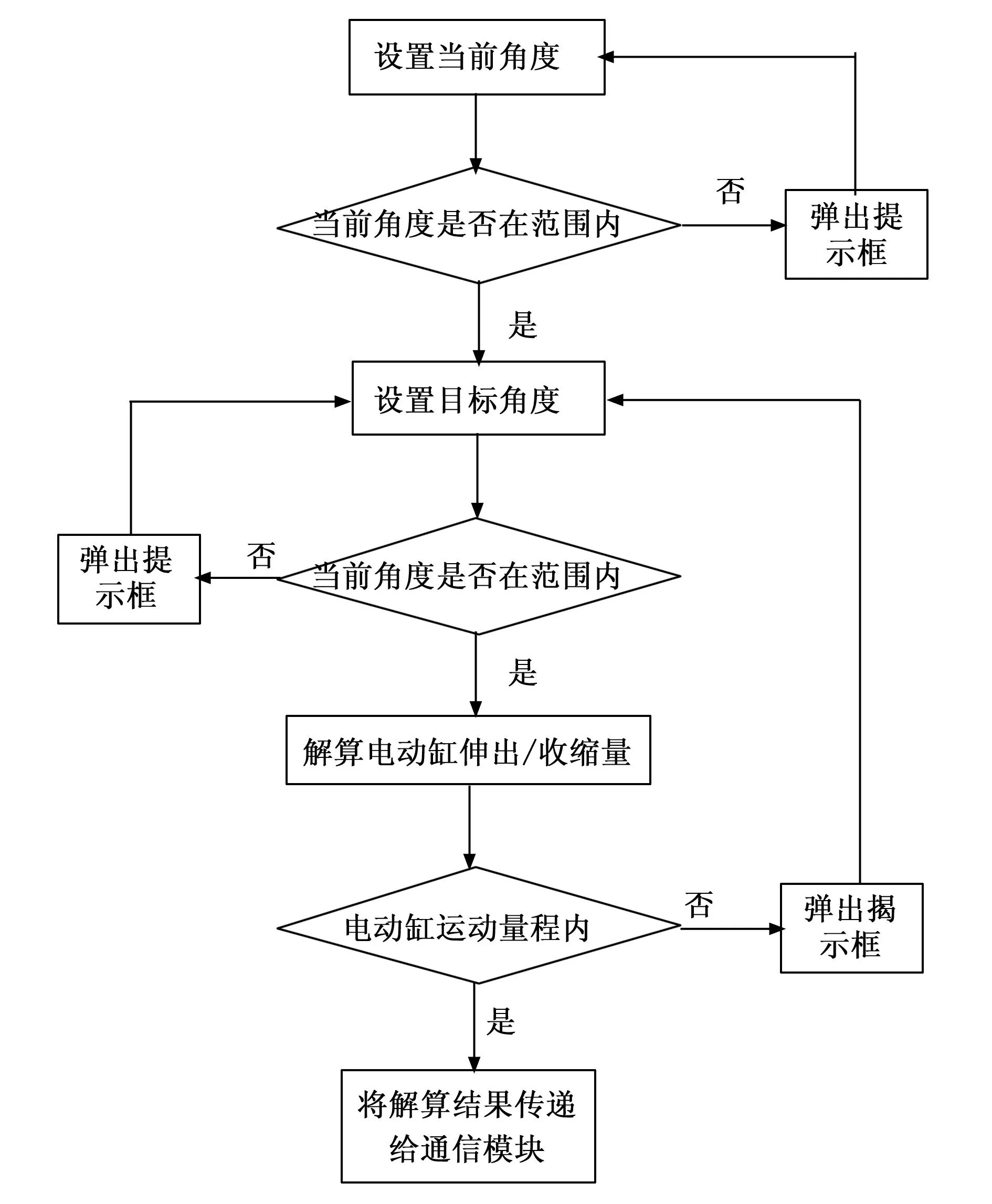
图8 解算模块流程图
3.4 通信模块设计
通信模块主要是完成上位机和电动缸驱动器的串口通信,可分为串口设置模块、数据接收解析模块和数据发送模块。
串口设置模块完成串口的波特率、校验方式、停止位、流控设置、数据接收定时器开启、数据发送定时器开启等功能,其设计流程图如图9所示[17-18]。
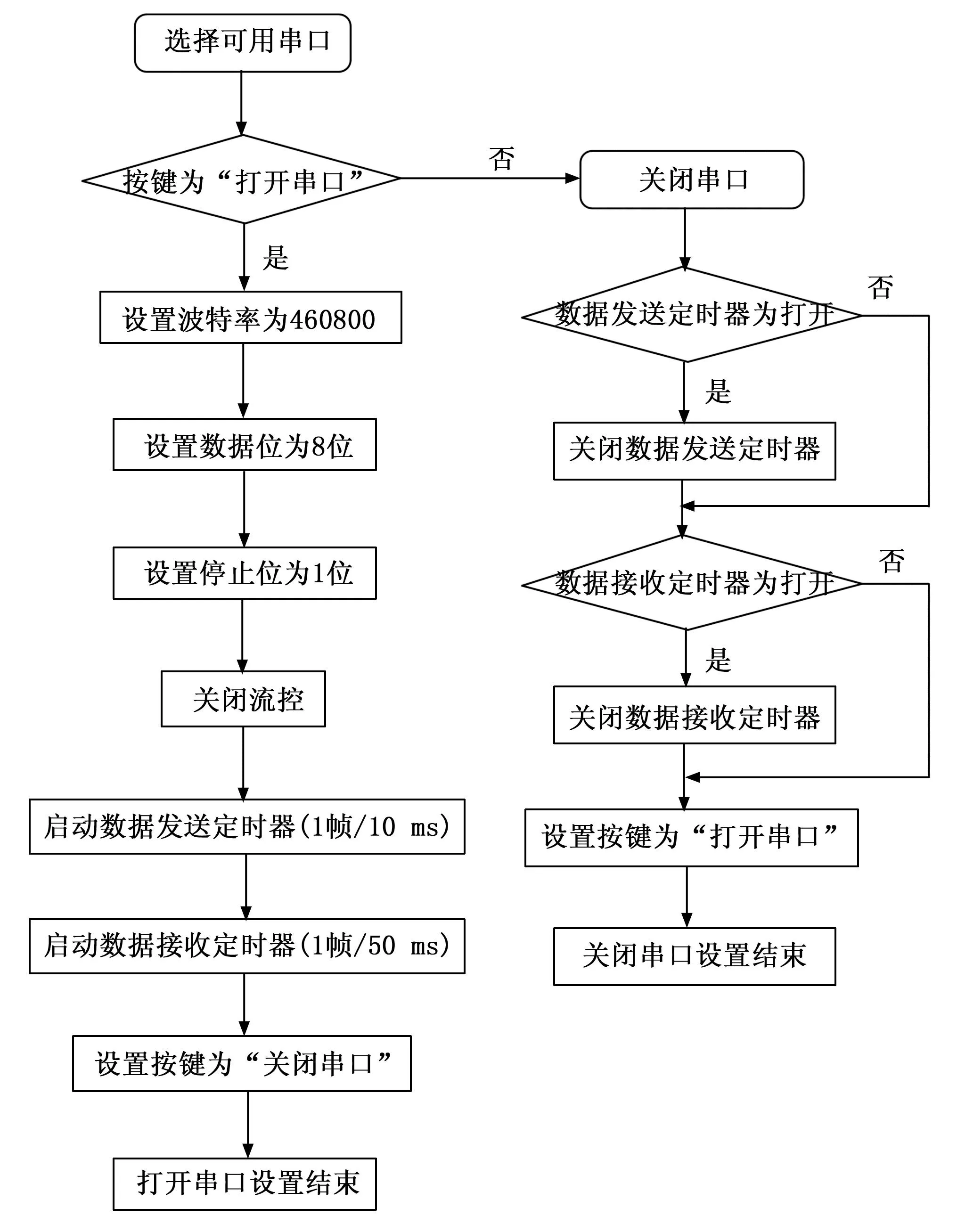
图9 串口设置模块流程图
数据接收解析模块主要是完成串口数据的接收解析,并将解析结果以指示灯的模式显示至软件界面,数据接收模块的频率为1帧/50 ms。因此,在串口打开时,开启定时器timer1,定时器的周期设置为50 ms,当定时周期到,自动触发槽函数void timer_50ms_out()函数,在该函数完成数据处理和显示。接收数据每帧为8个字节,帧头为0XEB90。帧类型0X1F代表俯仰状态,0X1E代表方位状态,每一帧采用CRC16校验,其流程图如图10所示。

图10 数据接收模块流程图
数据发送模块主要完成上位机向电动缸驱动器发送指令,控制电动缸运动,指令周期为1帧/10 ms。在点击界面上“运行”按钮时,启动定时器timer2,定时周期为10 ms,该定时器为电动缸指令发送周期。同时开启控制周期定时器timer3,定时周期为500 ms,该定时器为运动控制周期。按照先发解锁帧、再发送启动帧的顺序发送解锁和启动指令,每个指令发送5次,其主流程图如图11所示。

图11 数据发送模块主流程图
在运动控制周期内,当解锁和启动指令发送完毕后,先判断电动缸剩余运动长度是否大于12 mm。若大于,则判断电动缸目前运行速度是否大于额定转速,若小于,则在该运动周期内速度增加1,否则按额定速度运行。若电动缸剩余运动长度小于等于12 mm,则判断剩余运动长度是否大于1 mm,若大于则判断运行速度是否大于1,若大于1,则在该控制周期内速度减少1,否则按照速度为1运行,直至剩余运动长度小于1 mm。按照速度缓慢增加或减小的控制目的是为了保障电动缸运行的平稳性,防止出现超调。其周期内速度控制流程图如图12所示。为保障电动缸驱动器能够可靠收到指令,每个指令帧在一个控制周期发送5次,俯仰和方位控制流程一致。
4 试验验证与可靠性分析
4.1 试验验证
1)俯仰角度验证
将发射装置运输至发射阵地,利用起落臂上的基准面测量发射装置的俯仰和滚转角度,调整发射装置底部垫板使二者均为0o,随后用地脚螺栓将发射装置固定。将发射装置俯仰调转至一定角度,利用精度为1′的光学象限仪在发射装置基准平面上进行俯仰角度测量,测得角度即为发射装置实际俯仰角度。
将发射装置依次从0°转至5°,然后发射装置转回0°,然后再从0°转至10°。按照此方法,利用应急控制软件,依次将发射装置俯仰角度调转至10°、20°、30°、40°、50°、60°。调转到位后用光学象限仪进行测量,测量结果见表1所示。

表1 发射装置俯仰角度测量结果
2)方位角度验证
将MG150A单筒瞄准镜安装在起落臂支耳转轴上,使瞄准镜上的滚转水泡均位于中位;调整瞄准镜的方位角,使其能够瞄准1 000米外的铁塔(真北方向基准)塔尖,记录瞄准镜读数β0。调转发射装置的方位偏转角一定角度,然后手动调整瞄准镜,使其仍能够瞄准1 000米外的铁塔塔尖,记录此时瞄准镜读数β。β-β0位置则为发射装置实际转过角度。
先用校瞄镜对远处标杆,测量发射装置方位0°对应的校瞄镜读数,然后向右调转发射装置至10°,读出此时校瞄镜读数,两次校瞄镜读数之差就是发射装置实际调转角度。依照此方法依次将发射装置分别向左和向右调转10°、20°、30°、40°、45°,测量结果见表2和表3所示。
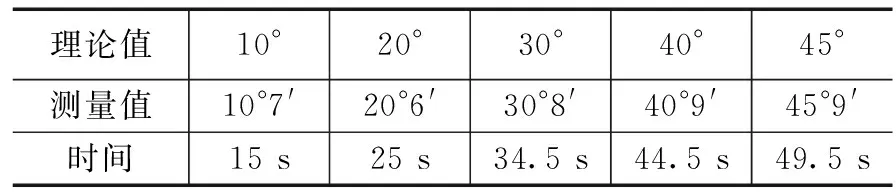
表2 发射装置俯仰角度测量结果(向右)

表3 发射装置俯仰角度测量结果(向左)
由表1~3中理论值和测量值的对比可以看出,采用应急控制方式,发射装置俯仰和方位的角度控制精度均不大于10′,满足发射装置设计精度:方位不大于10′,俯仰精度不大于20′的要求。
4.2 可靠性分析
根据原发射装置的工作原理,俯仰可靠性模型如图13所示。
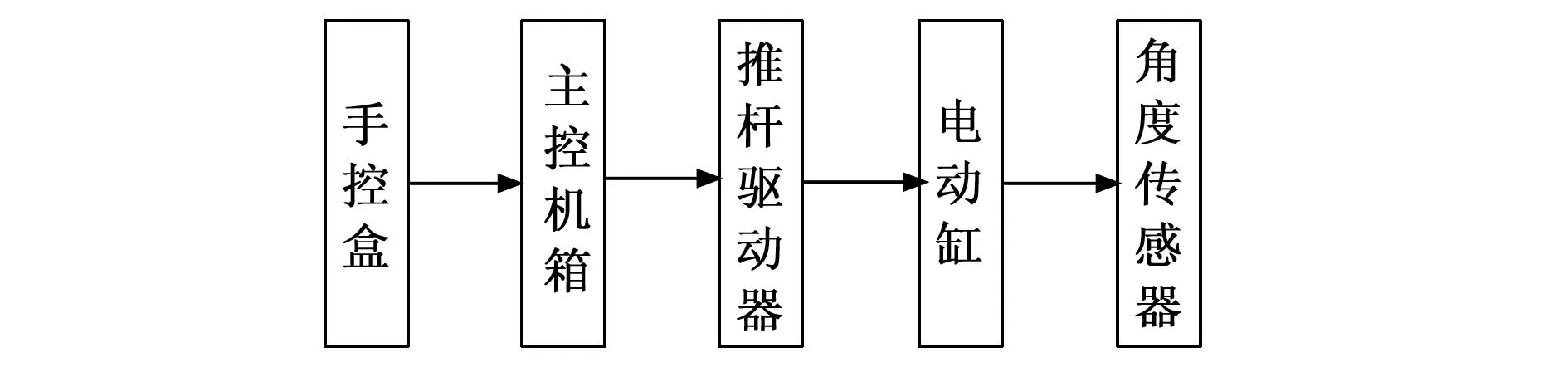
图13 原发射装置可靠性模型
从可靠性模型可以看出,发射装置是一个可靠性串联系统,即任意功能单元失效都将导致整个系统工作失效,通常对发射装置中电气产品均假定寿命分布近似为指数型,则发射装置的可靠性数学模型可用下式表示[19-20]:
(13)
式中,n为发射装置可靠性框图中组成单元的个数;Ri(t)为发射装置可靠性框图中各组成单元的可靠度;λS为发射装置的故障率;λi为发射装置各组成单元的故障率。
则,发射装置的平均故障间隔时间(MTBF)为:
(14)
结合各部件组成,由以上公式推导可算出原发射装置的控制可靠性如表4所示,其中发射装置总的平均故障间隔时间是可由公式(14)求得。
在应急控制工作方式下,其只需上位机(工控机)、驱动器、电动缸正常工作即可,其可靠性模型认为是上位机(工控机)、驱动器、电动缸3个部件的串联,其应急控制工作方式下可靠性计算表如表5所示。
由表4和表5对比可以看出,采用应急控制方式,发射装置应急工作方式下的可靠性得到较大提升。
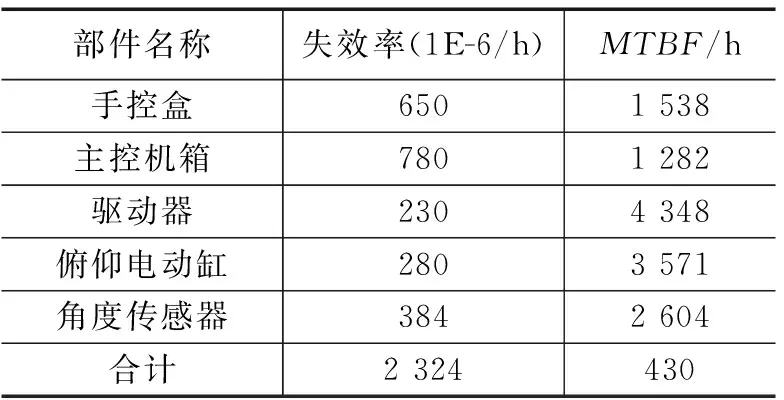
表4 发射装置可靠性计算表

表5 应急工作方式下发射装置可靠性计算表
5 结束语
本文针对某发射装置控制系统可靠性降低,远程电动控制模块出现偶发故障的情况,基于原有电动缸和驱动器,减少设备的改动,设计了一种最优配置下的应急控制方案。在原发射装置设备的基础上,分析其各部分的组成,基于减少对现有装备的改动原则,设计了应急控制软件。通过上位机控制软件对发射装置的俯仰和方位角度进行控制。经与系统联合调试,软件界面交互性好,运行稳定,充分验证了应急控制方案的可行性和有效性。后经外场试验验证,该应急控制方案亦能满足多任务工况的指标要求。通过对比发射装置应急控制改进前后可靠性指标MTBF,结果表明发射装置可靠性得到大幅提升。本文研究的发射装置应急控制方法对其它地面支持系统可靠性设计具有一定的参考价值。
猜你喜欢
数字海洋与水下攻防(2021年5期)2021-11-04
电脑爱好者(2020年6期)2020-05-26
装备环境工程(2019年7期)2019-08-21
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
中国核电(2017年1期)2017-05-17
光学精密工程(2016年5期)2016-11-07
现代防御技术(2016年1期)2016-06-01
上海电机学院学报(2015年3期)2015-02-28
计算物理(2014年2期)2014-03-11